
Abstract
Optimal power flow is a complex and highly non-linear problem in which steady-state parameters are needed to find a network’s efficient and economical operation. In addition, the difficulty of the Optimal power flow problem becomes enlarged when new constraints are added, and it is also a challenging task for the power system operator to solve the constrained Optimal power flow problems efficiently. Therefore, this paper presents a constrained composite differential evolution optimization algorithm to search for the optimum solution to Optimal power flow problems. In the last few decades, numerous evolutionary algorithm implementations have emerged due to their superiority in solving Optimal power flow problems while considering various objectives such as cost, emission, power loss, etc. evolutionary algorithms effectively explore the solution space unconstrainedly, often employing the static penalty function approach to address the constraints and find solutions for constrained Optimal power flow problems. It is a drawback that combining evolutionary algorithms and the penalty function approach requires several penalty parameters to search the feasible space and discard the infeasible solutions. The proposed a constrained composite differential evolution algorithm combines two effective constraint handling techniques, such as feasibility rule and ɛ constraint methods, to search in the feasible space. The proposed approaches are recognized on IEEE 30, 57, and 118-bus standard test systems considering 16 study events of single and multi-objective optimization functions. Ultimately, simulation results are examined and compared with the many recently published techniques of Optimal power flow solutions owing to show the usefulness and performance of the proposed a constrained composite differential evolution algorithm.
Similar content being viewed by others


Introduction
The optimal power flow (OPF) integrates the computation of power flow and economic dispatch subject to the system’s physical and electrical constraints1. In the research field of electrical power systems, OPF is an extensively sophisticated topic due to various interesting challenges, and it possesses both the planning and operating stages. In OPF, perfect values of control variables and system quantities are calculated to find the most efficient system operation and planning subject to various constraints. Many classical mathematical techniques have succeeded in finding the solution to the OPF problem, including the Newton method, linear, non-linear, quadratic programming, and interior point method. These techniques are limited to handling algebraic functions only. They cannot consider the convexity, require initial point, more significant control parameters, and continuity assumptions, and are gradient-based search algorithms trapped into local optima2.
In the past few years, numerous metaheuristic algorithms have been introduced to find better results for OPF problems, and most of these methods successively overcome the limitations of classical techniques that not only stagnate into local optima but are also unable to explore the global optima. These algorithms include a differential search algorithm (DSA)3 proposed by Abaci and Yamacli, who considered various single and multi-objective functions to optimize standard IEEE systems, in4 adaptive group search optimization (AGSO) proposed by Daryani et al. to solve OPF problem considering multi-objective function model, backtracking search optimization algorithm (BSA) in5 wherein valve-point loading and multi-fuel cost are considered for the output of thermal power generators. Furthermore, differential evolution (DE) with the integration of various constraint techniques6, multi-objective differential evaluation algorithm (MO-DEA)7, moth swarm algorithm (MSA)8, improved colliding bodies optimization (ICBO)9, chaotic artificial bee colony (CABC)10, Gbest ABC (GABC)11, adaptive real coded biography based optimization algorithm (ARCBBO) was suggested in12, adaptive partitioning flower pollination algorithm (APFPA)13 was used to resolve OPF problems considering various single and multi-objective objective functions. Pandiarajan and Babulal14 proposed the integration of a fuzzy and harmony search algorithm (HSA) called (FHSA) to figure out the OPF problem; by doing this, two HSA parameters (i-e. bandwidth and pitch adjustment) were controlled by the fuzzy logic system. Furthermore, a combination of lévy mutation and teaching learning-based optimization (LTLBO) technique proposed in15, krill herd algorithm (KHA) in16 and stud KHA (SKHA) in17, glowworm swarm optimization18, hybrid modified imperialist competitive algorithm (MICA) and teaching–learning algorithm (TLA) (MICA-TLA)19 there has also popular optimization techniques for searching the OPF problem solution. However, Objectives in OPF problems are variable, where no single algorithm is the best to address every objective function of OPF problems. Therefore, there is room for the new algorithm to solve most of the OPF problems efficiently.
This paper proposed optimizing single and Multi-objective approaches to solving OPF problems. Existing work in the literature clearly shows that the basic or improved version of optimization algorithms was used to solve the OPF problems. Each method has its strong points and limitations, and it is confirmed in the No Free Lunch (NLF) theorem20, which indicates that no single optimization algorithm can solve in the best way for all types of real word problems. Recently, an outstanding global optimizer-constrained composite differential evolution (C2oDE)21 algorithm has had various advantages, i.e., Simple in structure, implemented easily in any programming language, with few control parameters, combining the strength of different trial vector generation strategies.
Furthermore, to handle the constraints of OPF problems, mainly in the entire literature, researchers either adopt the static penalty function or directly discard the infeasible population. The former method is more responsive to selecting the penalty coefficient; even if a small penalty coefficient may cause examination of the infeasible space, a significant coefficient of penalty function may not explore the entire search space. However, in the OPF problem, recent advanced constraint handling techniques (CHTs) still need to be used. Therefore, in this paper, feasibility rule (FR), ɛ-constraint method (ECM), and a combination of these CHTs are utilized to solve the OPF problem by employing a composite DE search algorithm. Moreover, the performance of each CHTs and their varieties, such as C2oDE-FR, C2oDE-ECM, C2oDE-FR-ECM, and C2oDE-ECM-FR, have been statistically analyzed and compared. Besides, proposed CHTs are implemented successfully to solve the OPF problem on a small scale IEEE 30, 57 and a large-scale power network of 118-bus test systems. Most objective functions from the literature review, such as cost of active power generation, emission rate of greenhouse gases, power loss, voltage deviation, and voltage stability index, are considered to test the performance of the proposed C2oDE algorithm along with the integration of CHTs. Correspondingly, sixteen events of single and Multi-objective functions are formulated to test the efficacy of various CHTs. The simulation results of all events are thoroughly examined and compared with the latest research findings.
The contributions of the study are outlined as follows:
-
Two representative constraint techniques, such as feasibility rule (FR) and epsilon constraint method (ECM), and their combinations are employed with the current state-of-the-art unconstrained CoDE search algorithm to solve the OPF problem.
-
Sixteen events of highly complex non-linear objective functions are formulated to solve single and multi-objective OPF problems and show the superiority and performance of the proposed algorithm.
-
Simulation results of all the algorithms C2oDE-FR, C2oDE-ECM, C2oDE-FR-ECM, and C2oDE-ECM-FR are statistically compared.
-
Small to large-scale power system networks such as IEEE 30, 57, and 118-bus networks are adopted to test the proposed Algorithm.
The remaining division of this article is planned as Sect. 2 contains mathematical modeling of OPF and constraint handling techniques, and Sect. 3 describes the objective function and study events. The proposed optimization algorithm is defined in Sect. 4, simulation results and comparisons are discussed in Sect. 5, and concluding remarks are produced in Sect. 6.
Mathematical modelling of OPF problem
Generally, OPF is a complex and non-linear problem, and its main objective is to optimize single and multi-objective functions subject to satisfy the set of equality and inequality constraints. Mathematically, the OPF problem is described as follows:
Minimize \(f\left(\overrightarrow{x},\overrightarrow{u}\right), \overrightarrow{x} \wedge \overrightarrow{u}\in S, {L}\le \left(\overrightarrow{x},{\overrightarrow{u}}\right)\le {U}\)
whereas \(f\left(\overrightarrow{x},\overrightarrow{u}\right)\) is the fitness function, \({g}_{j}\left(\overrightarrow{x},\overrightarrow{u}\right)\) and \({h}_{j}(\overrightarrow{x},\overrightarrow{u})\) are the inequality and equality constraints, vector \(\overrightarrow{x}\) are dependent or state variables, \(\overrightarrow{u}\) is independent or control variables. S is the search space, L and U are the lower and upper bound, r espectively of vectors \(\overrightarrow{x}\) and \(\overrightarrow{u}\).
State and control variables
The state variables describe the power system's state, and the power flow in the network is controlled by control variables shown in Fig. 1. Where, NG, NL, NC, and NT are the number of generators, load, shunt VAR compensator, and transformer buses respectively and nl shows the number of branches.

State and control variables.
Constraints and constraint handling techniques
Constraints
The solution to the OPF problem must achieve both equality (active and reactive power balance) and inequality (operating limits of power system components) constraints. Figure 2 shows the equality and inequality constraints examined in the present study.
where, \({P}_{{D}_{i}}\) and \({Q}_{{D}_{i}}\) are the active and reactive demand at bus i, \({G}_{ij}\) and \({B}_{ij}\) are shunt conductance and susceptance between bus i and j respectively.\({\delta }_{ij}\) is the voltage angle difference between bus i and j and shows NB the number of buses.

Equality and inequality constraints.
At the time of the optimization process, the proposed algorithm chooses the values of each variable between the min and max limit.
Proposed constraint handling techniques
Usually, all the real word problems are constraint type defined in Eq. (1), in which the equality constraints \({h}_{j}(\overrightarrow{x},\overrightarrow{u})\) given in Eqs. (2) and (3) are automatically satisfied when the solution of power flow is converged. However, special attention is needed to inequality constraints \({g}_{j}\left(\overrightarrow{x},\overrightarrow{u}\right)\) given in Eqs. (4) to (10). Generally, the jth inequality constraint violation \({G}_{j}(\overrightarrow{x})\) is given as:
However, the overall degree of constraint violation \(G(\overrightarrow{x})\) can be calculated by the sum of all the inequality constraint violations and given as:
Constrained optimization problems mean to search in the feasible region, and EAs are population-based stochastic search methods in which an infeasible solution is complicated to discard. Therefore, proper CHTs are used together with EAs to enhance the overall performance of an algorithm. This work proposes two CHTs: feasibility rule (FR) and ε constrained method (ECM). FR is given in22 and suggests three rules to compare any two solutions described as follows:
-
1.
Both solutions are feasible; select the one with a better objective function value.
-
2.
Both solutions are infeasible; choose the one with a lower value of constraint violation.
-
3.
One is feasible, and the other is infeasible; always select a feasible one.
The second proposed CHT is ECM has given in23,24, in which two solutions \({\overrightarrow{x}}_{i}\) and \({\overrightarrow{x}}_{j}\) are compared as follows:
In (13), the parameter \(\varepsilon\) decays as increasing the iteration number and is given as
where the parameter ε0 is the primary threshold, initially it is equal to \(max(G\left(\overrightarrow{x}\right))\), T is the maximum generation, t is the current generation, constant parameter λ = 6 recommended in25 and p controls the degree of convergence of objective function.
Objective functions and study events
To highlight the superiority and effectiveness of the proposed C2oDE algorithm by considering the various CHTs, 16 events comprised of single and multi-objective functions are evaluated and implemented on IEEE 30, 57, and 118-bus standard IEEE networks. Bus 1 is considered the slack/reference bus in the event of 30 and 57-bus systems; however, in the 118-bus system, the 69th bus is the slack/reference bus. The role of the reference bus is to achieve equality constraints given in Eqs. (2) and (3) during the load flow study. In subsequent sub-sections, the mathematical formulation of different events for the 30, 57, and 118-bus tests is described.
IEEE 30-bus system
The base MVA, bus, branch, and generator data of the IEEE 30-bus test network is taken from26, and a summary of the significant components of this system is arranged in Table 1. There are 10 events are formulated for the IEEE 30-bus network, in which the first six events comprised of minimizing single objective and the remaining four events are based on weighted sum multi-objective optimization.
Event 1: minimization of basic fuel cost
Almost in all the literature, minimization of fuel cost was considered, and the relationship between the generator output power (MW) and the fuel cost ($/h) is given by a quadratic curve described as:
where, \({P}_{{G}_{i}}\) is the generated output power of ith bus and \({a}_{i}, {b}_{i}, {c}_{i}\) The constant cost coefficients of that generator are given in5,27 and classified as in Table 2.
Event 2. minimization of fuel cost multi-fuels
Thermal power generation may have multi-fuel resources, including coal, oil, and natural gas. Therefore, the relationship between fuel cost vs output power for such plants is given in the piecewise quadratic function shown in Fig. 3.

Output power vs fuel cost of single and multi-fuels.
Mathematically, the cost function of a multi-fuel ith generator is given as follows:
where, \({P}_{{G}_{i}}\) is the generator output power within the specified range of \(\left[{P}_{{G}_{ik}}^{\mathrm{ min }}, {P}_{{G}_{ik}}^{\mathrm{ max}}\right]\) and k is the fuel type. The total fuel cost of the objective function can be calculated using Eq. (18).
In this event, the multi-fuel cost is proposed for the two generators and range of output power (MW) with their coefficients given in5 and shown in Table 3, whereas, the cost for the other four generators is identical as in the event 1.
Event 3: voltage stability improvement
Estimate of voltage stability is an issue that is receiving growing attention from power system researchers due to system collapses in the past because of voltage instability. Voltage stability index (Lmax) has developed which can be defined based on Lj local indicator. Let NG and NL be the number of generator and load buses respectively, and then local indicator Lj can be calculated as
where sub-matrices \({Y}_{LL}\) and \({Y}_{LG}\) are calculated from the YBUS matrix after separating PV and PQ buses as given in (17).
The objective function of power system stability in this event is the maximum value of Lj and is given as:
Event 4: minimization of emission
Many harmful gases such as SOx and NOx are emitted in tones per hour (t/h) into the atmosphere using conventional fuel's thermal power generation (MW). In the present event, the emission is considered the objective function of OPF and computed as:
where, the values of the parameters \({\alpha }_{i}, {\beta }_{i}, {\gamma }_{i}, {\omega }_{i}\) and \({\mu }_{i}\) are given in Table 2.
Event 5: active power loss minimization
Mathematically active power loss (MW) can be given as:
where, \({G}_{q(ij)}\) is the conductance of branch q connected in between bus i and j and \({\delta }_{ij}={\delta }_{i}-{\delta }_{j}\), is the voltage angle difference.
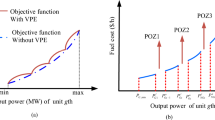
Event 6: minimization of basic fuel cost with valve-point loading
Valve-point loading wants to be measured for precise modeling and a more realistic cost of fuel vs generator output power (MW). Generation of power from multi-valve thermal engines shows variation in the fuel cost function, which is shown in the sinusoidal function. Such sinusoidal function is added to the fuel cost and resulting curve between output power (MW) vs fuel cost as shown in Fig. 4.

Single generators cost curve with and without valve point.
Mathematically, generator fuel cost considering valve-point loading is given by9:
where the constants \({d}_{i}\) and \({e}_{i}\) are the valve point loading parameters, and their values are given in Table 2.
Event 7: simultaneous optimization of basic fuel cost and active power loss
The weighted sum approach is used to convert multi-objective optimization functions into single-objective optimization and is denoted as:
whereas, active power loss \({P}_{loss}\) can be computed bsing Eq. (23) and the parameter \({\lambda }_{P}\) is equal to 40 as suggested in8.
Event 8: simultaneous optimization of voltage deviation and fuel cost
According to power quality, the voltage deviation index is the most important aspect, and it is minimized by enhancing the voltage profile. The cumulative voltage deviation (VD) function at the PQ nodes is described as:
The combined weighted sum of basic fuel cost and voltage deviation is given by:
where the weight factor \({\lambda }_{VD}\) is assigned a value of 100 as in9 and8.
Event 9: simultaneous optimization of voltage stability and fuel cost
Simultaneously, the minimization of basic fuel cost and maximization of voltage stability are converted into a single objective:
whereas, the parameter \({\lambda }_{L}\) is called a weight factor equal to 100 suggested by8 and Lmax is computed by Eq. (21).
Event 10: simultaneous optimization of cost, emission, losses, and vd
In this event, simultaneously, four objectives are considered to minimize, and the combined fitness function is given:
where, \({\lambda }_{E}=19,\) \({\lambda }_{VD}=21\) and \({\lambda }_{P}=22\) are the constant weights are considered the same as in8 to balance among the objective functions.
IEEE 57-bus test system
To test the effectiveness of the C2oDE algorithm, the IEEE 57-bus system is considered. Four different events are considered to optimize with the C2oDE algorithm with two single objectives and the remaining two based on multi-objective, data given in Table 4.
Event 11: basic fuel cost minimization
In OPF, the basic objective is to minimize fuel cost, and mathematically, the function of fuel cost is the same as in Eq. (16). The coefficient of generator cost26 and emission5 are shown in Table 5.
Event 12: multi-objective optimization of fuel cost and vd
The weighted sum single objective optimization minimizes this event's basic fuel cost and VD. The fitness function in this study event is the same as in event 8 of IEEE 30-bus and mathematically is given by an Eq. (27).
Event 13: multi-objective optimization of voltage stability and fuel cost
The formulation of this event's weighted sum single objective function is the same as in event 9 of 30-bus. Also, lambda sub cap L is the same as in event 9.
Event 14: optimization of voltage deviation
In this event, the minimization of VD is considered the objective function of cumulative PQ buses and is calculated using Eq. (26).
IEEE 118-bus system
Furthermore, a large-scale 118-bus standard IEEE test network is considered to test the superiority of the proposed C2oDE algorithm. A couple of single objective events are considered for this system. Table 6 gives the bus, branch, generator, and other related data of the 118-bus network.
Event 15: basic fuel cost minimization
The constant parameters of fuel cost are taken from26, and the formulation of the fuel cost function is similar to event 1 of 30-bus.
Event 16: active power loss minimization
In this event, the minimization of real power loss is considered the objective function and calculated using Eq. (23).
Proposed optimization algorithm
OPF is a constrained optimization problem, and how to solve constrained optimization problems has greater practical significance. Evolutionary algorithms (EAs) have involved noticeable attention in efficiently resolving practical constrained optimization problems in the past two decades. The constrained EAs have two main components: the search algorithm and the appropriate constrained handling method. Differential evolution (DE) is a popular EA; it has numerous attractive advantages to solving constrained optimization problems quickly because it is implemented, includes few control parameters, and achieves top rank in many computations28. Numerous DE variants have been applied in the literature to find solutions to constrained-type engineering problems. In this work, a constrained composite.
DE (C2oDE) global optimizer25 is proposed and added with two different CHTs to find the balance between constraints and objective functions. The framework of the proposed C2oDE optimization algorithm is introduced in the next section.
C2oDE
In the C2oDE algorithm, differential vectors generate offspring29. Fundamentally, there are four stages in the proposed algorithm, in the first stage randomly generation of the initial population \({\overrightarrow{x}}_{i}^{t}(i\in \left\{1\dots NP\right\})\) in the range of lower and upper bound of search space. After that in the second stage, mutation operators are used for the generation of mutant vector \({\overrightarrow{v}}_{i}^{t}(i\in \left\{1\dots NP\right\})\), in this stage three type of mutation operators were used, such as.
1) current-to-rand/l
2) Modified rand-to-best/l
3) current-to-best/l
where, \({\overrightarrow{x}}_{r1}^{t}\) to \({\overrightarrow{x}}_{r5}^{t}\) are the mutually different decision vectors randomly selected from 1 to NP individuals, \({\overrightarrow{x}}_{best}^{t}\) The random differentiation shows the best solution for current generation t and rand. Each mutation vector has distinct features ; for example, the mutation vector given in Eq. (30) can explore the entire search space and increase diversity. However, Eqs. (31) and (32) accelerate the convergence to get information from the best individual. In the third step trial vector \({\overrightarrow{u}}_{i}^{t}\) is generated using a binomial crossover operator between each pair of \({\overrightarrow{v}}_{i}^{t}\) and \({\overrightarrow{x}}_{i}^{t}\) described as:
where, \({x}_{i,j}^{t}, {u}_{i,j}^{t}\) and \({v}_{i,j}^{t}\) are the jth dimension of \({\overrightarrow{x}}_{i}^{t}\), \({\overrightarrow{u}}_{i}^{t}\) and \({\overrightarrow{v}}_{i}^{t}\) Correspondingly, CR is the rate of crossover, and Jrand is the integer number randomly produce between 1 to D. Finally, in the fourth step the selection operator is applied among the \({x}_{i}^{t}\) and \({u}_{i}^{t}\) to find the candidate for the next population using Eq. (34) and Fig. 5 shows the framework of the proposed C2oDE algorithm.

Framework of proposed C2oDE algorithm.
It can be noticed from Fig. 5 that, for each target vector three off-springs are generated with distinct advantages of exploration and exploitation using trail vector generation strategy and pool of parameters. However, OPF problems are constrained optimization problems; therefore, there must be a compromise between objective function and constraint. Therefore, to balance constraint and objective function, two different CHTs are incorporated in this work at the phase of preselection and selection, as shown in Fig. 5. As stated in No Free Lunch (NFL)20, using various CHTs rather than single ones at different stages of EAs is better. Thus, the feasibility rule (FR) and ε constrained method (ECM) two CHTs are implemented with the proposed algorithm at the preselection phase and selection to select feasible trial vectors and populations for the next generation, respectively. OPF problems are very highly complicated. Therefore, a restart technique is used to avoid trapping into local optima, and it is triggered when the standard deviation of both the objective function or constraint violation is less than the assigned threshold value. The flow diagram of the proposed C2oDE-FR-ECM algorithm is given in Fig. 6. C2oDE maintains a population consisting of NP target vectors: \({\overrightarrow{x}}_{i}^{t}=\{{\overrightarrow{x}}_{1}^{t},{\overrightarrow{x}}_{2}^{t}, \dots ,{\overrightarrow{x}}_{NP}^{t} \}\), their objective function values:

Flow chart for the implementation of C2oDE-FR-ECM.
\({\varvec{f}}({\overrightarrow{{\varvec{x}}}}_{1}^{{\varvec{t}}}),{\varvec{f}}({\overrightarrow{{\varvec{x}}}}_{2}^{{\varvec{t}}}),\) \(\dots\) , \({\varvec{f}}({\overrightarrow{{\varvec{x}}}}_{{\varvec{N}}{\varvec{P}}}^{{\varvec{t}}})\), and their degree of constraint violation: \({\varvec{G}}({\overrightarrow{{\varvec{x}}}}_{1}^{{\varvec{t}}}),\) \({\varvec{G}}({\overrightarrow{{\varvec{x}}}}_{2}^{{\varvec{t}}}),\) \(\dots ,\) \({\varvec{G}}({\overrightarrow{{\varvec{x}}}}_{{\varvec{N}}{\varvec{P}}}^{{\varvec{t}}})\).
Results and comparison
Various standard IEEE power system test networks were selected to judge the effectiveness of the proposed C2oDE algorithm. These include 30, 57, and 118-bus networks applying two different constraint handling techniques (CHTs) at various stages.
Table 7 summarizes the parameters of the proposed algorithm for the simulation of standard IEEE networks provided that values of F and CR are [0.8, 1.0, 1.0] and [0.2, 0.1, 0.9], respectively.
Comparison among proposed chts
The C2oDE algorithm is compared and tested with the two most widely used CHTs, FR and ECM, at different places, such as at the preselection stage (to select the best trial vector) and selection (population for the next generation). Table 8 presents the statistical values over the 25 independent runs for the individual events of 1 to 14 using FR and ECM constraint handling methods. The columns of Table 8 show the best, mean, worst, and standard deviation of each event over 25 runs. Table 8 indicates that a single method cannot deliver the best statistical results in all the events. Therefore, this paper includes proposed CHTs in two stages to find a feasible trial vector and population for the next generation. Four different C2oDE variants were implemented considering two CHTs at different locations, i.e. C2oDE-FR, C2oDE-ECM, C2oDE-FR-ECM, and C2oDE-ECM-FR. Specifically, in C2oDE-FR and C2oDE-ECM, only the feasibility rule and ɛ constraint method were utilized for the best trail vector and population of the next iteration. However, in C2oDE-FR-ECM, the feasibility rule was used for finding the best trail vector, and ɛ constraint method was used to select the population for the next iteration while in C2oDE-ECM-FR, ECM for the trial vector, and FR was used to select candidates for the next iteration.
The bold numbers shown in Table 8 are the best objective function values in a particular event obtained by methods. Furthermore, in Table 8, C2oDE-FR and C2oDE-FR-ECM outperform compared to C2oDE-ECM and C2oDE-ECM-FR. In contrast, C2oDE-ECM cannot beat any other variant in any study event, whereas C2oDE-ECM-FR only performs better in event1 and 4. On the other hand, FR and FR-ECM obtain the best fitness value, almost an equal number of events. Hence, selecting the proper CHTs for an OPF problem of various events is challenging because the objective function and constraints of OPF are non-linear. On the other hand, C2oDE-FR-ECM has the benefit of converging with the help of FR and exploring the entire search space to get better diversity with the help of ECM. Thus, the combination of FR and ECM at the different phases of the search algorithm, i.e., in C2oDE-FR-ECM, would attain the best value of the objective function or be close to the best fitness in most of the events. The subsequent subsections analyze and discuss the best results according to the objective functions of all the IEEE test systems.
IEEE 30-bus test system
Table 9 shows the results of 30-bus system decision variables (i.e., state and control variables of event 1 to event 10). Column 2 and 3 of Table 9 displays the operating range of decision variables and in all the events, the results of these variables are within their allowable range and give the best value(s) of fitness considering one of the four proposed algorithms. In this work, the generator's output power in MW at the swing bus (PG1) and the MVAr rating of all the generators are considered the control variable and treated as inequality constraints during the optimization process. The allowable range of reactive power for all the generators is taken from MATPOWER26. Furthermore, simulation results obtained using the three variants of C2oDE by applying CHTs are presented in Table 10 (for single objective) and Table 11 (for multi-objective) compared with the recent methods of similar studies in the literature. Obtained results of proposed CHTs in which all the decision variables (dependent and independent) and constraints are within desirable limit however, in the approach of static penalty, some of these variables are violated and are highlighted with footnotes as shown in Table 10 and.
Table 11. During the optimization process, voltages at the PQ, buses are often found critical, such as near the upper limit (0.95–1.05 p.u). Frequently, failure of the power system components appears due to overvoltage, and it is highly undesirable.
On the other hand, the Voltage deviation (VD) of the IEEE 30-bus system would be 1.2 p.u (24 × 0.05) if the value of voltage level at all load buses is under the permissible limit. However, in the literature in many cases, VD is more than a permissible specified value and is also highlighted with footnotes, as shown in Table 10 and.
Table 11. Furthermore, the main goal of this work is to prove effectiveness by merely considering statistical results and establishing the strict agreement of system constraints using various CHTs. It is noticed from Table 10 that values of the objective function in event 1 using FR and ECM-FR give 800.411290$/h and 800.411384, respectively, satisfying all the inequality constraints. In event 2 C2oDE-FR finds the minimum cost of 646.40111 $/h among various CHTs considering the multi-fuel effect however, in event 3 in which fitness function is considered to minimize the maximum L-index (Lmax) of PQ buses, FR-ECM obtained the best simulation result of 0.13628 in comparison to the algorithms of past studies. In event 4, the minimization of emissions in (t/h) is 0.204817, almost the same in all the proposed CHTs. Also, the algorithms reported in the literature include SF-DE6, MSA8, and ARCBBO12 whereas, in event 5 minimization of active power losses, FR-ECM and FR give the best results of 3.08391 MW and 3.08392 MW compared with the other techniques shown in Table 10. Voltage waveforms of the 30-bus network are given in Figs. 7 and 8 and it shows that the output value of voltage (p.u) is within the range of minimum and maximum value without violating any of the constraints.

Event-1 to event-5: Voltage profile of best solution For IEEE 30-bus systems.

Event-6 to event-10: Voltage profile of best solution For IEEE 30-bus systems.
The fitness function of fuel cost minimization considering valve-point loading proposed in event 6, in which C2oDE-FR obtained the best result of 832.0700 $/h is high compared to basic fuel cost in event 1. However, in events, 7–10 weighted sum multi-objective optimization of various functions is proposed in which the combined effect of various single objective functions decides the output results of optimization algorithms. For example, in event 7, a higher weight charge of fuel cost was preferred to minimize more fuel cost than power loss.
Table 11 shows that the single algorithm FR, FR-ECM, or ECM-FR is not able to find the best value of fitness in all the events. In event 7, C2oDE-FR gives the global minimum of combined fitness of 1040.11188 compared to other methods. Furthermore, in events 8 to event 10, obtained values of combined multi-objective functions are minimal in FR-ECM compared to all the algorithms. Furthermore, the convergence curve of C2oDE using two CHTs at different phases for events 1, 2, and 6 considering fuel cost as the objective function are indicated in Figs. 9, 10, 11, respectively.

Convergence curves of comparative CHTs of event-1.

Convergence curves of comparative CHTs of event-2.

Convergence curves of comparative CHTs of event-6.
Among the different CHTs, the convergence speed is not strangely different, though rapid and smooth convergence is observed in both FR and FR-ECM. Figures 12, 13, 14 give the convergence curve of event 3 to event 5, respectively. In event 3, the voltage stability index indicator is scrutinized in the fitness function in which the convergence curve is uneven because of the nature of the objective function. Moreover, Figs. 15, 16, 17, 18 show the convergence curve of multi-objective optimization events. The convergence curve of only the best fitness value of CHTs is shown in Figs. 15, 16, 17, 18 for clear visibility and the irregularities between objective functions during convergence due to non-linear relationships among the fitness and independent variables.

Convergence curves of comparative CHTs of event-3 for 30-bus.

Convergence curves of comparative CHTs of event-4 for 30-bus.

Convergence curves of comparative CHTs of event-5 for 30-bus.

Convergence curves of event-7 (C2oDE-FR) for 30-bus.

Convergence curves of event-8 (C2oDE-FR-ECM) for 30-bus.

Convergence curves of event-9 (C2oDE-FR-ECM) for 30-bus.

Convergence curves of event-10 (C2oDE-FR-ECM) for 30-bus.
IEEE 57-bus test system
The solution of decision variables (i-e. dependent and control) of the 57-bus network and the simulation results of best objective functions among all the methods are demonstrated in Table 12.
Table 12 clearly shows that the decision variables are within the desirable range. However, Table 13 compares all CHTs (FR, FR-ECM, ECM-FR) with the recent literature methods. Minimum and maximum values of a few generators' MVAr ratings are relatively narrow and taken from26 even though proposed CHTs dully satisfied the generator reactive power limit. Further, the IEEE 57-bus system consists of 50 PQ buses, and the voltage level of feasible solutions of these buses must be within [0.94 to 1.06] p.u range and the cumulative VD would be (50 × 0.06) 3 p.u. The values of VD found to be more than 3 p.u are marked with a footnote in one reference in which static penalty function is used as CHTs. In events 12 and 14 among four CHTs, the results of C2oDE-FR are best; on the other hand, in events 11 and 13 C2oDE-FR-ECM outperformed among all the proposed CHTs, providing all the constraints are within feasible search space. In most of the events, according to the minimization of objective functions of IEEE 57-bus systems, C2oDE-FR and C2oDE-FR-ECM outperform in comparison to the methods of past studies. In event 11 the best value of the objective function is 41,666.2413 $/h, the lowest values comparison to the methods as shown in Table 13 also the power loss (14.86981151 MW) is best compared to the method available in the literature. Event 12 is the multi-objective, considering fuel cost and VD by C2oDE-FR is 41,774.422, which is close to the value given by SP-DE6.
Further, multi-objective voltage stability and fuel cost are considered in event 13, in which fuel cost (41,694.089) seems better compared to event 12. In event 14 C20DE-FR outperformed APFPA13, however with the expense of fuel cost compared to the previous study. Larger values of shunt VAR compensators (30 MVAr) have been seen in16 and7, hence comparison with the present study is not valid. Figure 19 shows the voltage profiles of the best solution among the different CHTs of event 11 to event 14 for the 57-bus system.

Event-11 to event-14: Voltage profile of best solution For IEEE 57-bus systems.
Figure 19 clearly shows that the operating value of the voltage at all the buses is within the minimum and maximum range, such as satisfying voltage constraints so that no bus experiences overvoltage, whereas, in some buses, the voltage level is close to the upper bound. Figure 20 shows the convergence curves of applied CHTs. As compared to other methods, C2oDE-FR-ECM converges faster in event 11 and attains a feasible solution; subsequently, a considerable number of objective function evaluations due to generators' reactive power limits and in the optimization process, convergence of the actual solution starts when the optimization algorithm attains the feasible search space. Further, the clear convergence diagram of the multi-objective optimization fitness function of event 12 and event 13, in which only the best methods are presented, is shown in Figs. 21 and 22, respectively.

Relative convergence curves of event-11 (C2oDE-FR-ECM) for IEEE 57-bus.

Convergence curves of event-12 (C2oDE-FR) for 57-bus.

Convergence curves of event-13 (C2oDE-FR-ECM) for 57-bus.
We can notice from the above figures that the convergence curves of voltage deviation and L-index are non-smooth in multi-objective events. Figure 23 shows the convergence curve of single objective optimization (voltage deviation) in which all methods need many fitness function evaluations to seek the global optimum solution because of the non-linear relation between bus voltage and independent variables in the 57-bus tests network.

Convergence curves of event-14 (C2oDE-FR) for IEEE 57-bus.
IEEE 118-bus test system
Generally, for an increased number of variables, the performance of C2oDE-FR-ECM is found to be superior. Hence, in the large-scale 118-bus test network, an effective combined FR-ECM constraint technique is proposed to show the superiority and scalability of the proposed algorithm. Furthermore, the minimization of basic fuel cost (Event 15) and real power losses (Event 16) is considered the objective functions of this system. Table 14 shows the calculated parameters and control variables of the best solution found using C2oDE-FR-ECM.
Allowable values of MW and MVAr rating of generators, the voltage level of transformers, and the MVAr rating of shunt VAR compensators are taken from26, and Table 14 clearly shows that in events 15 and 16, all the control variables are fully satisfied the minimum and maximum limit. The results of event 15 and event 16 are that the basic fuel cost is 134,943.8 $/h and active power losses are 16.79906 MW, respectively. Figure 24 shows the voltage profile of all the buses and the minimum and maximum limits, while Fig. 25 gives the convergence curves of events 15 and 16.

Event-15 and 16: Voltage profile of C2oDE-FR-ECM For IEEE 118-bus systems.

Convergence curves of event-15 and 16 (C2oDE-FR-ECM) for IEEE 118-bus.
However, Table 15 shows the comparative results of the proposed C2oDE-FR-ECM with the recently implemented DE variants in the literature. Table 15 shows that the proposed algorithm finds a better approximate optimal solution than all the other state-of-the-art evolutionary algorithms.
Conclusion
Optimal power flow (OPF) is a highly complex, constrained, and non-linear problem in a power system. In the solution of OPF problems without using suitable CHTs, the decision variable of the system may be violated and given poor safety, ill-functioning protective devices, and unnecessary power losses, especially with a static penalty function. Therefore, during the operation of the power system, constraint handling techniques (CHT) are responsible for optimizing objective functions subject to decision variables, and constraint functions should be within safe limits. Therefore, the application and usefulness of two CHTs, such as feasibility rule (FR) and ε constraint method (ECM), and their combinations with outstanding global optimizer C2oDE (C2oDE-FR, C2oDE-ECM, C2oDE-FR-ECM, C2oDE-ECM-FR) have been presented and used to solve OPF problem taking into various non-linear constraints. Three standard test networks, small to large-scale power system networks such as IEEE 30, 57, and 118-bus, are scrutinized to solve OPF problems with the CHTs group that helps achieve the best feasible solution in most of the events. A comparative analysis of the four techniques reveals the challenge of definitively establishing the superiority of one CHT over others in various OPF events. However, combining CHTs such as C2oDE-FR-ECM and C2oDE-ECM-FR method demonstrates considerable efficacy in achieving nearly optimal solutions in most events. However, it does not guarantee the most optimal solution or rapid convergence in all events.
Nonetheless, the significance of an efficient constraint-handling technique cannot be overstated. As our study demonstrates, inadequate CHT, mainly the penalty approach, may unknowingly lead to violations of network parameter limits. Therefore, to ensure a feasible solution to the OPF problem, the power system constraints must be within defined limits, is essential for its secure and proper functioning. The recommended configurations of CHT effectively bring the network to the desired state compared with several other methods in the past study.
Data availability
The data of proposed standard IEEE test systems used to support the findings of this study have been found in the open-source MTPOWER Package26. The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.
References
Abbas, G., Wu, Z. & Ali, A. Multi-objective multi-period optimal site and size of distributed generation along with network reconfiguration. IET Renew. Power Gener. https://doi.org/10.1049/rpg2.12949 (2024).
Al-Kaabi, M., Dumbrava, V. & Eremia, M. Single and multi-objective optimal power flow based on hunger games search with pareto concept optimization. Energies 15, 8328. https://doi.org/10.3390/en15228328 (2022).
Zhou, S. et al. Design and evaluation of operational scheduling approaches for HCNG penetrated integrated energy system. IEEE Access 7, 87792–87807. https://doi.org/10.1109/access.2019.2925197 (2019).
Alghamdi, A. S. Optimal power flow in wind-photovoltaic energy regulation systems using a modified turbulent water flow-based optimization. Sustainability 14, 16444. https://doi.org/10.3390/su142416444 (2022).
Ali, A. et al. Multi-objective optimal siting and sizing of distributed generators and shunt capacitors considering the effect of voltage-dependent non-linear load models. IEEE Access 11, 21465–21487. https://doi.org/10.1109/access.2023.3250760 (2023).
Zellagui, M., Belbachir, N. & El-Sehiemy, R. A. Solving the optimal power flow problem in power systems using the mountain gazelle algorithm. Eng. Proc. 56, 176. https://doi.org/10.3390/ASEC2023-1626 (2023).
Ahmed, M. A. et al. Techno-economic optimal planning of an industrial microgrid considering integrated energy resources. Front. Energy Res. 11(February), 1–12. https://doi.org/10.3389/fenrg.2023.1145888 (2023).
Cao, W. et al. A hybrid discrete artificial bee colony algorithm based on label similarity for solving point-feature label placement problem. ISPRS Int. J. Geo-Inf. 12, 429. https://doi.org/10.3390/ijgi12100429 (2023).
Malik, M. Z. et al. Power supply to local communities through wind energy integration: An opportunity through China-Pakistan economic corridor (CPEC). IEEE Access 9, 66751–66768. https://doi.org/10.1109/ACCESS.2021.3076181 (2021).
Habib, S. et al. Improved whale optimization algorithm for transient response, robustness, and stability enhancement of an automatic voltage regulator system. Energies 15(14), 5037. https://doi.org/10.3390/en15145037 (2022).
Cheng, L. et al. Adaptive differential evolution with fitness-based crossover rate for global numerical optimization. Complex Intell. Syst. https://doi.org/10.1007/s40747-023-01159-4 (2023).
Du, J. et al. An interval power flow method based on linearized distflow equations for radial distribution systems. Asia-Pac. Power Energy Eng. Conf. APPEEC 2020-Septe, 3–7. https://doi.org/10.1109/APPEEC48164.2020.9220372 (2020).
Wu, Z. et al. Bi-level planning of multi-functional vehicle charging stations considering land use types. Energies 13(5), 1283. https://doi.org/10.3390/en13051283 (2020).
Abbas, G. et al. A modified particle swarm optimization algorithm for power sharing and transient response improvement of a grid-tied solar PV based A.C. microgrid. Energies 16(1), 348. https://doi.org/10.3390/en16010348 (2022).
Cai, H., Liu, B. & Pan, S. On the cooperation between evolutionary algorithms and constraint handling techniques: A further empirical study. IEEE Access 8, 130598–130606. https://doi.org/10.1109/ACCESS.2020.3009429 (2020).
Ali, A. et al. Pareto front-based multi-objective optimization of distributed generation considering the effect of voltage-dependent non-linear load models. IEEE Access 11, 12195–12217. https://doi.org/10.1109/access.2023.3242546 (2023).
Bhurt, F. et al. Stochastic multi-objective optimal reactive power dispatch with the integration of wind and solar generation. Energies 16(13), 4896. https://doi.org/10.3390/en16134896 (2023).
Abbas, G. et al. A parametric approach to compare the wind potential of Sanghar and Gwadar wind sites. IEEE Access 10, 110889–110904 (2022).
Mirsaeidi, S. et al. A review on optimization objectives for power system operation improvement using FACTS devices. Energies 16(1), 161. https://doi.org/10.3390/en16010161 (2022).
Yan, X. & Zhang, Q. Research on combination of distributed generation placement and dynamic distribution network reconfiguration based on MIBWOA. Sustainability 15, 9580. https://doi.org/10.3390/su15129580 (2023).
Ali, B. et al. A comparative study to analyze wind potential of different wind corridors. Energy Rep. 9, 1157–1170. https://doi.org/10.1016/j.egyr.2022.12.048 (2023).
Nasir, M., Sadollah, A., Grzegorzewski, P., Yoon, J. H. & Geem, Z. W. Harmony search algorithm and fuzzy logic theory: An extensive review from theory to applications. Mathematics 9, 2665. https://doi.org/10.3390/math9212665 (2021).
Ali, A. et al. Solution of constrained mixed-integer multi-objective optimal power flow problem considering the hybrid multi-objective evolutionary algorithm. IET Gener. Transm. Distrib. 17(1), 66–90 (2023).
Su, H., Niu, Q. & Yang, Z. Optimal power flow using improved cross-entropy method. Energies 16, 5466. https://doi.org/10.3390/en16145466 (2023).
Khan, M. et al. Modeling of intelligent controllers for solar photovoltaic system under varying irradiation condition. Front. Energy Res. 11, 1288486 (2023).
Zheng, L. & Wen, Y. A multi-strategy differential evolution algorithm with adaptive similarity selection rule. Symmetry 15, 1697. https://doi.org/10.3390/sym15091697 (2023).
Abbas, G. et al. A novel energy proficient computing framework for green computing using sustainable energy sources. IEEE Access 11, 126542–126554 (2023).
Alghamdi, A. S. Optimal power flow of hybrid wind/solar/thermal energy integrated power systems considering costs and emissions via a novel and efficient search optimization algorithm. Appl. Sci. 13, 4760. https://doi.org/10.3390/app13084760 (2023).
Ali, A. et al. A bi-level techno-economic optimal reactive power dispatch considering wind and solar power integration. IEEE Access 11, 62799–62819. https://doi.org/10.1109/access.2023.3286930 (2023).
Li, J. et al. Self-adaptive opposition-based differential evolution with subpopulation strategy for numerical and engineering optimization problems. Complex Intell. Syst. 8, 2051–2089. https://doi.org/10.1007/s40747-022-00734-5 (2022).
Ali, A., Shah, A., Keerio, M. U., Mugheri, N. H., Abbas, G., Touti, E., Hatatah, M., Yousef, A. & Bouzguenda, M. Multi-objective security constrained unit commitment via hybrid evolutionary algorithms. IEEE Access (2024).
Hassani, S., Mousavi, M. & Gandomi, A. H. Structural health monitoring in composite structures: A comprehensive review. Sensors 22, 153. https://doi.org/10.3390/s22010153 (2022).
Ali, A., Abbas, G., Khan, A., Yousef, A. & Touti, E. Optimal site and size of FACTS devices with the integration of uncertain wind generation on a solution of stochastic multi-objective optimal power flow problem. Front. Energy Res. 11, 1293870.
Acknowledgements
The authors extend their appreciation to the Deanship of Scientific Research at Northern Border University, Arar, KSA for funding this research work through the project number “NBU-FFR-2024-2448-08”.
Author information
Authors and Affiliations
Contributions
1. A.A.: Conceptualization, Investigation, Writing–original draft, Writing–review and editing. 2. A.H.: Formal Analysis, Writing–review and editing. 3. M.U.K.: Supervision, Writing–review and editing. 4. N.H.M.: Formal Analysis, Writing–review and editing. 5. G.A.: Conceptualization, Writing–original draft, Writing–review and editing. 6. M.H.: Funding acquisition, Visualization, Validation, Writing–review and editing. 7. E.T.: Funding acquisition, Software, Visualization, Writing–review and editing. 8. A.Y.: Funding acquisition, Validation, Writing–review and editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ali, A., Hassan, A., Keerio, M.U. et al. A novel solution to optimal power flow problems using composite differential evolution integrating effective constrained handling techniques. Sci Rep 14, 6187 (2024). https://doi.org/10.1038/s41598-024-56590-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-56590-5
Keywords
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
