
Abstract
Real systems showing regime shifts, such as ecosystems, are often composed of many dynamical elements interacting on a network. Various early warning signals have been proposed for anticipating regime shifts from observed data. However, it is unclear how one should combine early warning signals from different nodes for better performance. Based on theory of stochastic differential equations, we propose a method to optimize the node set from which to construct an early warning signal. The proposed method takes into account that uncertainty as well as the magnitude of the signal affects its predictive performance, that a large magnitude or small uncertainty of the signal in one situation does not imply the signal’s high performance, and that combining early warning signals from different nodes is often but not always beneficial. The method performs well particularly when different nodes are subjected to different amounts of dynamical noise and stress.
Similar content being viewed by others

Introduction
Real complex systems often experience sudden and substantial changes, also referred to as regime shifts or tipping events, as environments or the system’s internal properties gradually change. Such sudden changes often alter functions of the system, sometimes in an irreversible manner. Tipping phenomena have been used to explain, for example, mass extinctions in ecosystems1,2, deforestation3,4, onset of epidemic spreading5, and progression of mental disorders6,7,8 and other diseases9,10. No matter whether the system transits from a desirable state to an undesirable one (e.g., species’ extinctions, epidemic spreading) or vice versa (e.g., recovery from disease), one is generally interested in anticipating a large regime shift due to a tipping event before it occurs. From dynamical systems points of view, a tipping event probably most famously corresponds to a change in the stability of an equilibrium. Theory suggests that critical slowing down happens near such a tipping point, which one can exploit to construct early warning signals for an impending tipping event1,11. Various early warning signals for tipping events, which can be applied to observed data without knowledge of the dynamical system equations, have been proposed1,5,10,11,12,13,14,15.
Complex systems whose tipping points we want to anticipate are more often than not composed of dynamical elements interacting on a network. In an ecosystem, animals, plants, or microbial species, for example, are interconnected by mutualistic, prey-predator, and other types of interactions. In a climate system, geographical regions are interconnected by, for example, water and heat transport. Network resilience is a comprehensive approach with which to understand how dynamics on networks respond to perturbations and system failures16. For dynamics on networks that possibly show tipping events and are relevant to these applications, it is highly likely that the network structure is complex17,18 and that, related to this, all the nodes do not emit equally useful early warning signals19,20,21,22,23,24. Specifically, nodes that are about to tip may be emitting more useful early warning signals than other nodes in the same system that are still far from tipping. Evidence in favor of this view is that, as a dynamical system gradually changes, some nodes may tip earlier than others, showing multistage transitions11,25,26,27,28,29. Therefore, selecting an appropriate set of sentinel nodes from which one calculates the early warning signal may improve the quality of the signal in addition to saving the cost of observing uninformative nodes.
Several methods for selecting a sentinel node set, denoted by S, for constructing early warning signals have been proposed. The dynamical network biomarker theory searches for an S that maximizes a composite index9,10,30,31. The index is the average pairwise correlation of the sample of data between the nodes within S multiplied by the standard deviation of the samples across the nodes in S, which is divided by the average pairwise correlation of the samples between a node in S and a node outside S. Another analytical approach is to identify a multidimensional linear dynamics model near the bifurcation point only from observed data and then use the dominant eigenvector associated with the estimated dynamics to select S (i.e., as the set of the ith nodes such that the ith entry of the dominant eigenvector is the largest in terms of the absolute value)23. Note that an earlier study pointed out the usefulness of the dominant eigenvector19. Participation of the node in the dominant eigenvector is also used for selecting S in other studies21,24. In addition, an eigenvector-based method has also been proposed for ranking the nodes most sensitive to perturbations32. A different study numerically showed that nodes with small degrees (i.e., small number of the neighboring nodes) are good performers20. A method to determine S based on network control theory also found an advantage of selecting nodes with small degrees27. Using the nodes receiving the highest total input from other nodes is also a powerful heuristic for setting S29. Simply using the nodes with the highest fluctuations also improves upon other naive methods29. Note that the last two methods are often better than using all the nodes in the network as S, and the same may be true for other node selection methods.
Except for the dynamical network biomarker theory, these methods provide ranking of nodes and suggest that we should include the top-ranked nodes in S. It is unclear whether combining the nodes in S improves an early warning signal compared to when the single top node in S is used. Any early warning signal (e.g., variance of the signal, lagged autocorrelation) is noisy because, by design, an early warning signal exploits the information about impending tipping events hidden in noisy observations. If a given early warning signal measured for each ith node is independent for the different nodes in S, then averaging them including the case of a weighted average is expected to produce a better early warning signal owing to the central limit theorem. Quantitatively, the standard deviation of the early warning signal should decrease according to ∝ n−1/2, where n is the number of nodes in S, and ∝ represents “in proportion to”. However, nodes in a complex system are interrelated, such as through edges in the case of conventional networks, and the states of different nodes are correlated in general33,34,35. Therefore, it is not a trivial concern whether or not combination of the top-ranked nodes generates a high-quality early warning signal. For example, suppose that S is composed of n nodes close to each other in the network and that the states of these n nodes are hence strongly correlated. In this case, averaging the early warning signals over the n nodes does not help much to reduce their fluctuation because the n early warning signals are similar to each other. We may be then tempted to select n nodes that are far from each other on the network even if some of the n nodes do not provide early warning signals of top quality.
In fact, the aforementioned dynamical network biomarker theory aims to optimize the set S, which the original authors call the dominant group, implicitly resolving this problem9,10,30,31. However, the composite index that they propose is heuristic, and why this method works well in medical applications10,36 and how the effectiveness of their method translates to other applications such as in ecology are elusive. Furthermore, this theory and most other proposals of early warning signals neglect that early warning signals are themselves noisy. Considering fluctuations of early warning signals in their design is necessary for at least two reasons. First, if a candidate early warning signal carries a lot of noise, then that signal may not be useful even if its expected value is sensitive to the approach of the system towards the tipping point. A recent study highlighted interplay of the dominant eigenvector direction of the Jacobian matrix of the dynamics and the primary noise direction that is dragged towards the nodes receiving high dynamical noise24. Second, in the aforementioned example of n nodes, let us assume that the expectation of the single-node early warning signal is the same for all the n nodes. We stated that averaging over the n early warning signals would be beneficial relative to the single-node early warning signals only if the n signals are not strongly correlated with each other. In this situation, the expectation of the averaged early warning signal is the same as that of the single-node early warning signal. The bonus of the averaging is only present in the reduced fluctuation in the averaged as opposed to the single-node early warning signal. To enable such discussion, we need to assess the fluctuation as well as the magnitude of early warning signals.
In the present study, we develop a mathematical framework for node set selection for early warning signals based on stochastic differential equations on networks. By assuming dynamics near the equilibrium and using the variance of the node’s state as the early warning signal, we propose an index whose maximization gives an optimal node set for constructing an early warning signal. We demonstrate our method with analytically solvable networks with two or three nodes and with numerically investigated larger networks combined with various dynamics models.
Results
Theory
We consider an N-dimensional noisy nonlinear dynamical system in continuous time. We regard each of the N dynamical elements as a node and the entire dynamical system as stochastic dynamics on a network with N nodes. We denote by \({x}_{i}(t)\in {\mathbb{R}}\) the state of the ith node at time \(t\in {\mathbb{R}}\). We write \({{{{{{{\bf{x}}}}}}}}(t)={({x}_{1}(t),\, \ldots,\, {x}_{N}(t))}^{\top }\), where ⊤ represents the transposition. We assume that x(t) obeys a set of stochastic differential equations in the Itô sense given by
where \(F:{{\mathbb{R}}}^{N}\to {{\mathbb{R}}}^{N}\); B is an N × N matrix; W(t) represents an N-dimensional vector of independent Wiener processes (i.e., white noise).
Assume that the dynamics given by Eq. (1) has an equilibrium in the absence of noise, which we denote by \({{{{{{{{\bf{x}}}}}}}}}^{*}={({x}_{1}^{*},\, \ldots,\, {x}_{n}^{*})}^{\top }\). By linearizing Eq. (1) around x*, we obtain a set of linear stochastic differential equations given by
where z(t) = x(t) − x*, and the N × N matrix A is the sign-flipped Jacobian matrix of F at x(t) = x*. Equation (2) is a multivariate Ornstein-Uhlenbeck (OU) process24,37, and x* is asymptotically stable in the absence of noise if and only if A is positive definite.
The covariance matrix in the equilibrium, corresponding to z* = (0, …, 0)⊤, is given as the solution to the Lyapunov equation given by
where C = (Cij) is the N × N covariance matrix, and Cij represents the covariance between zi(t) and zj(t), which is equal to the covariance between xi(t) and xj(t), at equilibrium37,38. The solution C is unique if the real part of all the eigenvalues of A is positive38.
Outcomes of the covariance matrix such as the standard deviation and correlation coefficient are often used as early warning signals for noisy multivariate dynamics. In practice, we need to estimate these quantities from samples. Therefore, we consider the sample variance of xi(t), which is a major early warning signal1,39,40,41, and its average over a given node set29,42, as candidates of early warning signals. The choice of the variance rather than the standard deviation is because of mathematical tractability. We emphasize that the rationale behind averaging the sample variance over nodes is that we may be then able to obtain a less fluctuating early warning signal than that calculated from a single node.
Assume that we observe L samples of xi(t) from each node i in the given node set S. We denote by \({\hat{V}}_{i}\) the unbiased sample variance of xi(t) calculated from the L samples. Let us consider the average of \({\hat{V}}_{i}\) over the \(n=\left\vert S\right\vert\) nodes in set S as an early warning signal. Without loss of generality, we assume that S = {1, 2, …, n}, where n ≤ N. We denote this average by
By assuming that zi,1, …, zi,L are i.i.d. and using E[zi,ℓ] = 0, we obtain
where E denotes the expectation, Tr denotes the trace, \(\overline{C}\) is the leading principal minor of order n of C (i.e., the submatrix of C composed of Cij with i, j ∈ {1, …, n}), and λi is the ith eigenvalue of \(\overline{C}\). As shown in Supplementary Note 1, we also obtain the variance of \({\hat{V}}_{S}\), denoted by \(\,{{\mbox{var}}}\,[{\hat{V}}_{S}]\), as follows:
The coefficient of variation (CV), i.e., the standard deviation divided by the mean, of \({\hat{V}}_{S}\), which quantifies the relative uncertainty in the estimation of \({\hat{V}}_{S}\), is given by
Equation (7) has a couple of implications. First, the CV decays according to ∝ L−1/2 as the number of samples, L, increases, regardless of the node set S. This scaling corresponds to the central limit theorem. Second, in the case of a single node, \(CV=\sqrt{2/(L-1)}\) regardless of the node. Therefore, a large value of the sample covariance, \({\hat{V}}_{i}\), or its expectation, \(E[{\hat{V}}_{i}]\), at a node i compared to at other nodes does not imply that \({\hat{V}}_{i}\) is better than \({\hat{V}}_{j}\)’s (with j ≠ i) as an early warning signal. A large signal carries a proportionately large amount of noise. This property also holds true when one uses the sample standard deviation, instead of the sample variance, of single nodes as early warning signal. Third, the CV with n ≥ 2 is always smaller than the CV with n = 1 (i.e., \(\sqrt{2/(L-1)}\)) unless all but one eigenvalues of \(\overline{C}\) are equal to 0. Note that this result holds true owing to λi ≥ 0 ∀ i, which follows from the fact that \(\overline{C}\) is a covariance matrix and therefore positive semidefinite. This result motivates us to use the average of \({\hat{V}}_{i}\) over nodes as opposed to \({\hat{V}}_{i}\) at a single node with the aim of improving the performance of the early warning signal. We will investigate this possibility in the following sections.
Coupled nonlinear dynamics on networks with two or three nodes
In this section, we analyze coupled nonlinear dynamics on networks with N = 2 and N = 3 nodes. Through this analysis, we highlight relevance of multistage transitions, impact of averaging \({\hat{V}}_{i}\) over nodes, heterogeneous amount of dynamical noise given to different nodes, and uncertainty of early warning signals, among other things. We then propose a measure of the quality of early warning signals in the form of \({\hat{V}}_{S}\) and a method to select an optimal node set for constructing early warning signals.
Two nodes connected by a directed edge
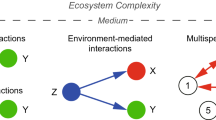
We consider a network composed of two nodes and a directed edge of weight w(≥0); see Fig. 1a for a schematic. We assume that node 1 influences node 2 but not vice versa. We also assume that, as a bifurcation parameter, denoted by r, gradually increases, node 1 undergoes a saddle-node bifurcation and that node 2 also undergoes a saddle-node bifurcation either almost at the same time as node 1 or after r has further increased. The model is given by
where Δr(≥ 0) is a constant, σ1 and σ2 are the intensities of dynamical noise applied to nodes 1 and 2, respectively, and f(x) satisfies the following conditions. First, we assume f(x, r) = r + x2 when r ≤ 0 and \(x\le \sqrt{-r}+\Delta x\), where Δx( > 0) is a small constant. This condition guarantees that, in the absence of coupling and dynamical noise, Eqs. (8) and (9) are both the topological normal form of the saddle-node bifurcation43. In other words, dx/dt = f(x, r) with r < 0 has a stable equilibrium \({x}^{*}=-\sqrt{-r}\) and an unstable equilibrium \({x}^{*}=\sqrt{-r}\), which collide at x* = 0 when r = 0. In Fig. 2, we show an example bifurcation diagram of single-node deterministic dynamics given by dx/dt = f(x, r). If σ1 = 0, then x1(t) undergoes a saddle-node bifurcation at r = 0 as r increases starting with a negative value. If σ2 = 0 and w = 0, then x2(t) undergoes a saddle-node bifurcation at r = Δr. Second, we assume that f(x, r) is continuous in terms of x and r for simplicity. Third, we assume that f(c, r) = 0 for ∀ r ≥ 0 for a unique positive value of c, which is larger than Δx. This implies that, in the absence of noise, x = c is the unique stable equilibrium after a node undergoes a saddle-node bifurcation as r gradually increases. This assumption in combination with the continuity assumption for f(x, r) also implies that the stable equilibrium apart from \({x}^{*}=-\sqrt{-r}\) persists for some r < 0 although its position changes from x = c in general. Therefore, there are two stable equilibria at least in some range of x < 0 near x = 0, as shown in Fig. 2.

a A network with N = 2 nodes connected by a directed edge. b A symmetric chain network with N = 3 nodes. The coupling strength is denoted by w. The stress given to each node is either r or r − Δr.

The solid and dashed lines represent stable and unstable equilibria, respectively.
We assume that w > 0 and consider this dynamical system in the range of bifurcation parameter r ∈ [ − 1, 0), with (x1, x2) satisfying − 1 ≤ x1, x2 < 0 in the absence of dynamical noise. In other words, we assume that x1 and x2 are both near the lower stable equilibrium in Fig. 2. In this situation, the input that node 2 receives from node 1, i.e., w(x1 + 1), is positive. To prevent node 2 from transiting from its lower to the upper state through a saddle-node bifurcation earlier than node 1 when r gradually increases, we assume that w ≤ Δr, which guarantees that − Δr + w(x1 + 1) ≤ 0. Let us gradually increase r starting with r = − 1. Then, x1 jumps from 0 to c at r = 0 via a saddle-node bifurcation. We distinguish between two cases depending on the change in x2 right after the transition of node 1 from x1 = 0 to x1 = c. If − Δr + w(c + 1) > 0, then x2 transits from x2 = 0 to x2 = c immediately after x1 does without a further increase in r (i.e., at r = 0). Otherwise, x2 does not transit at r = 0, and x2 does so at a positive value of r if we further increase r. The latter case is a multistage transition28,29.
The lower equilibrium of the coupled dynamical system, which exists if and only if r ≤ 0 and is locally stable when r < 0, is given by
The linearized dynamics around x* is given by Eq. (2) with
By combining Eqs. (3) and (11), we obtain
Note that \({x}_{1}^{*}\) and \({x}_{2}^{*}\) are negative such that C11, C12, and C22 are positive.
Here we recall that E denotes the expectation, and we let std denote the standard deviation. Because \({x}_{1}^{*}={0}^{-}\) as r → 0−, all of C11, C12, and C22 diverge as r → 0−. Therefore, \(E[{\hat{V}}_{1}],\, E[{\hat{V}}_{2}]\), and \(E[{\hat{V}}_{\{1,\, 2\}}]\), which are equal to C11, C22, and (C11 + C22)/2, respectively, all diverge as r → 0− according to ∝ (−r)−1/2. However, we argue that this fact does not immediately imply that \({\hat{V}}_{1},\, {\hat{V}}_{2}\), or \({\hat{V}}_{\{1,\, 2\}}\) is a high-quality early warning signal for the saddle-node bifurcation occurring at r = 0 because \(\,{{\mbox{std}}}\,[{\hat{V}}_{1}],\, \,{{\mbox{std}}}\,[{\hat{V}}_{2}]\), and \(\,{{\mbox{std}}}\,[{\hat{V}}_{\{1,\, 2\}}]\), which are proportional to \({C}_{11},\, \sqrt{{C}_{11}^{2}+2{C}_{12}^{2}+{C}_{22}^{2}}\), and C22, respectively, also diverge.
To investigate the quality of \({\hat{V}}_{1},\, {\hat{V}}_{2}\), and \({\hat{V}}_{\{1,\, 2\}}\) as early warning signals, we set w = 0.5, σ1 = 0.1, L = 100, and used three pairs of Δr and σ2 values, which we refer to as scenarios. In Fig. 3, we show \(E[{\hat{V}}_{1}],\, E[{\hat{V}}_{2}],\, E[{\hat{V}}_{\{1,\, 2\}}],\, \,{{\mbox{std}}}\,[{\hat{V}}_{1}],\, \,{{\mbox{std}}}\,[{\hat{V}}_{2}]\), and \(\,{{\mbox{std}}}\,[{\hat{V}}_{\{1,\, 2\}}]\) as we gradually increase r under the three scenarios. In Fig. 3a, we show the results for the first scenario, for which we set Δr = 1 and σ2 = σ1 = 0.1. The solid lines represent the expected value of each early warning signal. The shaded area represents the mean ± standard deviation. With these parameter values, when node 1 transits from x1 = 0 to x1 = c at r = 0, node 2 is still far from the bifurcation point. This is because the input from node 1 to node 2, which is equal to w(x1 + 1) ≈ 0.5, is substantially smaller than − Δr( = 1) such that x2 approximately obeys dx2 = ( − 0.5 + x2)dt + σ2dW2(t) near r = 0. Right after node 1 transits from x1 = 0 to x1 = c at r = 0, the input from node 1 to node 2 jumps to w(x1 + 1) ≈ 0.5(c + 1). Therefore, a multistage transition in which nodes 1 and 2 transit from their lower to the upper state at different r values occurs if 0.5(c + 1) < 1, i.e., 0 < c < 1. Otherwise (i.e., c ≥ 1), node 2 also transits from its lower to the upper state at r = 0. Regardless of whether or not a multistage transition occurs, Fig. 3a indicates that \(E[{\hat{V}}_{1}]\) is more sensitive to increases in r than \(E[{\hat{V}}_{2}]\) and \(E[{\hat{V}}_{\{1,\, 2\}}]\), and that \(\,{{\mbox{std}}}\,[{\hat{V}}_{1}]\) is larger than \(\,{{\mbox{std}}}\,[{\hat{V}}_{2}]\) and \(\,{{\mbox{std}}}\,[{\hat{V}}_{\{1,\, 2\}}]\). Therefore, it is not obvious which of \({\hat{V}}_{1},\, {\hat{V}}_{2}\), or \({\hat{V}}_{\{1,\, 2\}}\) is a better early warning signal.

The solid lines represent the mean. The shaded regions represent the standard deviation. We set w = 0.5, σ1 = 0.1, and L = 100. a (σ2, Δr) = (0.1, 1). b (σ2, Δr) = (0.1, 0.5). c (σ2, Δr) = (0.2, 1).
To rank these different candidates of early warning signals, we define the following index. We measure each early warning signal’s mean and standard deviation at r = − 0.3 and r = − 0.1. We do so based on the premise that it is necessary to measure signals at least at two r values to estimate how responsive the signal is to the change in the environment, i.e., r. As we explained in Supplementary Note 1, \({\hat{V}}_{1},\, {\hat{V}}_{2}\), and \({\hat{V}}_{\{1,\, 2\}}\) obey a normal distribution at equilibrium. Therefore, we measure a distance, denoted by d, between the normal distribution at r = − 0.3 and that at r = − 0.1 for each early warning signal. If d is large, it is relatively easy to tell the increase in the signal with relatively small uncertainty as r increases from − 0.3 to − 0.1, approaching a tipping point. Therefore, we propose that an early warning signal attaining a larger d value is better. Although there are various measures of the separability of two normal distributions44, inspired by the t-statistic, we define
where μ1 and var1 are the mean and variance of the normal distribution at r = − 0.3, and μ2 and var2 are those at r = − 0.1. We show in Supplementary Note 2 that the results shown in the remainder of this section are robust with respect to the choice of the two r values for calculating d. Note that d can be small even if the mean of the early warning signal grows by a large amount between the two r values. This is the case when var1 or var2 is large, i.e., when the uncertainty of the signal is large. In this situation, tracking the early warning signal is relatively uninformative. In contrast, even if the absolute magnitude of the increase in the signal is small (i.e., small \(\left\vert {\mu }_{1}-{\mu }_{2}\right\vert\)), the signal provides a good early warning if the uncertainty of the signal is small.
We have found that \(d({\hat{V}}_{1})=2.58,\, d({\hat{V}}_{2})=1.27\), and \(d({\hat{V}}_{\{1,\, 2\}})=2.78\). Therefore, we suggest that \({\hat{V}}_{1}\) is a better early warning signal than \({\hat{V}}_{2}\). We emphasize that it is not because \({\hat{V}}_{1}\) is larger than \({\hat{V}}_{2}\) but because \({\hat{V}}_{1}\) responds more strongly to an increase in r than \({\hat{V}}_{2}\) does with relatively small uncertainty. Furthermore, \({\hat{V}}_{\{1,\, 2\}}\), i.e., the average of \({\hat{V}}_{1}\) and \({\hat{V}}_{2}\), realizes a larger value of d than \({\hat{V}}_{1}\). Therefore, we suggest that \({\hat{V}}_{\{1,\, 2\}}\) is a better early warning signal than \({\hat{V}}_{1}\) and \({\hat{V}}_{2}\). This is intuitively because the averaging cancels out noise in the two signals, while \({\hat{V}}_{1}\) and \({\hat{V}}_{2}\) are not independent of each other due to the edge between nodes 1 and 2. We note that \(E[{\hat{V}}_{\{1,\, 2\}}]\) is smaller than \(E[{\hat{V}}_{1}]\) (see Fig. 3a), challenging a natural idea of using single nodes or node sets with the largest variance as sentinel nodes.
We show in Fig. 3b the mean and standard deviation of the signals for the second scenario; we changed Δr from 1 to 0.5. In this scenario, x2(t) always transits from its lower to the upper state immediately after node 1 does so at r = 0. This is because, when r → 0−, Eq. (8) implies that x1(t) → 0− if we ignore the noise term, and r − Δr + w(x1(t) + 1) ≈ 0 combined with Eq. (9) implies that x2(t) → 0−. Therefore, even with a small c value, both nodes 1 and 2 sequentially transit from its lower to the upper state at r = 0. Figure 3b indicates that \(E[{\hat{V}}_{2}]\) is responsive to increases in r to an extent similar to \(E[{\hat{V}}_{1}]\) is. The d values confirm this, i.e., \(d({\hat{V}}_{1})=2.58,\, d({\hat{V}}_{2})=2.50\), and \(d({\hat{V}}_{\{1,\, 2\}})=3.40\). Because the quality of \({\hat{V}}_{2}\) is much better than in the first scenario, the average signal, \({\hat{V}}_{\{1,\, 2\}}\), is substantially better than \({\hat{V}}_{1}\) in terms of d in the present second scenario, while \({\hat{V}}_{\{1,\, 2\}}\) was only marginally better than \({\hat{V}}_{1}\) in the first scenario.
In addition to different amounts of constant stress as parametrized by Δr, different nodes may be subject to different amounts of dynamical noise. We show in Fig. 3c the results for the third scenario, in which we set Δr = 1 and σ2 = 0.2. In this scenario, the saddle-node bifurcation for node 2 is delayed such that a multistage transition may occur, as in the first scenario. The difference to the first scenario is that, in the present scenario, node 2 receives a larger dynamical noise than node 1. Therefore, \({\hat{V}}_{2}\) is noisier than \({\hat{V}}_{1}\) and \({\hat{V}}_{\{1,\, 2\}}\), which is apparent in Fig. 3c. If we only measure the early warning signals at one r value (e.g., r = − 0.3 or r = − 0.1), then one may be tempted to regard that \({\hat{V}}_{2}\) is a better early warning signal than \({\hat{V}}_{1}\) and \({\hat{V}}_{\{1,\, 2\}}\) because \(E[{\hat{V}}_{2}]\) is larger than \(E[{\hat{V}}_{1}]\) and \(E[{\hat{V}}_{\{1,\, 2\}}]\). However, this conclusion is erroneous for two reasons. First, \(\,{{\mbox{std}}}\,[{\hat{V}}_{2}]\) is larger than \(\,{{\mbox{std}}}\,[{\hat{V}}_{1}]\) and \(\,{{\mbox{std}}}\,[{\hat{V}}_{\{1,\, 2\}}]\). Second, \({\hat{V}}_{2}\) is not much sensitive to the change in r, as Fig. 3c shows. In fact, we obtain \(d({\hat{V}}_{1})=2.58,\, d({\hat{V}}_{2})=0.97\), and \(d({\hat{V}}_{\{1,\, 2\}})=2.12\). This result suggests that \({\hat{V}}_{1}\) is a better signal than \({\hat{V}}_{2}\) and \({\hat{V}}_{\{1,\, 2\}}\). In this case, taking the average of \({\hat{V}}_{1}\) and \({\hat{V}}_{2}\) does not help because \({\hat{V}}_{2}\) is too poor. Lessons from the analysis of the present scenario are that (i) a large signal value does not necessarily imply a better early warning signal and that (ii) it is sometimes better to exclude some nodes from the calculation of the early warning signal if those nodes are either only marginally responsive to the change in the bifurcation parameter or they carry larger fluctuations than other nodes.
Chain with three nodes
In this section, we consider three nodes of identical nonlinear dynamics, except possible differences in the noise strength, coupled as an undirected chain network with N = 3 nodes. We show a schematic of the network in Fig. 1b. Specifically, we consider the set of stochastic differential equations given by
where f(x) is given in the “Two nodes connected by a directed edge” section. If c is small enough and σ1 = σ2 = σ3, node 2 transits from its lower to the upper state earlier than nodes 1 and 3 as r(≥ − 1) increases from a negative value because node 2 receives positive input from nodes 1 and 3 while node 1 and 3 each receive input solely from node 2.
When − 1 ≤ r ≤ 0, the equilibrium in the absence of noise satisfying \({x}_{1}^{*},\, {x}_{2}^{*},\, {x}_{3}^{*}\, < \,0\) is a solution of
and \({x}_{3}^{*}={x}_{1}^{*}\). If we ignore the dynamical noise, the first saddle-node bifurcation, which is the transition of node 2 from its lower to the upper state, occurs at r = rc, where rc satisfies \(0\, > \, {r}_{{{{{{{{\rm{c}}}}}}}}}\, > \, {r}_{{{{{{{{\rm{c}}}}}}}}}^{{\prime\prime} }\equiv 2w[-(w+1)+\sqrt{w(w+1)}]\), as r gradually increases from r = − 1. At r = rc, the two parabolas given by Eqs. (19) and (20) are tangent to each other. See Supplementary Note 3 for the derivation including that of the uniqueness of the stable solution satisfying \({x}_{1}^{*}(={x}_{3}^{*})\, < \, 0\) and \({x}_{2}^{*}\, < \,0\) when r ≤ rc. We set w = 0.05, which leads to \({r}_{{{{{{{{\rm{c}}}}}}}}}\, \approx \, {r}_{{{{{{{{\rm{c}}}}}}}}}^{{\prime\prime} } \,\approx -0.082\). Therefore, we calculate the d values at r = − 0.3 and − 0.1 as we did in the “Two nodes connected by a directed edge” section. We show in Supplementary Note 2 that the following results are reasonably robust against variation in the two r values.
We obtain the mean and standard deviation of the early warning signals, and then d, as follows. Equations (16), (17), and (18) lead to
To facilitate further analyses, we assume σ1 = σ3. Then, by substituting Eq. (21) and B = diag(σ1, σ2, σ1), which is by definition the diagonal matrix whose diagonal entries are σ1, σ2, and σ1 in this order, into Eq. (3), we obtain
By substituting Eqs. (22)–(25) into Eqs. (5) and (6), we obtain the mean and standard deviation of each early warning signal for any node set S. Because \({\hat{V}}_{1}\) and \({\hat{V}}_{3}\) obey the same normal distribution, we obtain \(E[{\hat{V}}_{\{1,\, 3\}}]=E[({\hat{V}}_{1}+{\hat{V}}_{3})/2]=E[{\hat{V}}_{1}]=E[{\hat{V}}_{3}]\). We also obtain \(\,{{\mbox{std}}}\,[{\hat{V}}_{\{1,\, 3\}}]=({C}_{11}+2{C}_{13}+{C}_{33})/[2(L-1)]=\,{{\mbox{std}}}\,[{\hat{V}}_{1}]\times \frac{1+Corr}{2}\), where Corr is the Pearson correlation coefficient between x1(t) and x3(t) in the equilibrium. Therefore, \(\,{{\mbox{std}}}\,[{\hat{V}}_{\{1,\, 3\}}]\) is smaller than \(\,{{\mbox{std}}}\,[{\hat{V}}_{1}]\) unless x1(t) and x3(t) are perfectly correlated, which does not happen because they are subjected to independent Wiener processes dW1(t) and dW3(t). Therefore, \({\hat{V}}_{\{1,\, 3\}}\) is always better than \({\hat{V}}_{1}\) and \({\hat{V}}_{3}\) for this model. In addition, due to the assumed symmetry between nodes 1 and 3, S = {1, 2}, {1, 3}, and {1, 2, 3} exhaust all possibilities of combining multiple nodes’ signals into one early warning signal. Therefore, it suffices to compare the performance of \({\hat{V}}_{2},\, {\hat{V}}_{\{1,\, 2\}},\, {\hat{V}}_{\{1,\, 3\}}\), and \({\hat{V}}_{{{{{{{{\rm{all}}}}}}}}}\equiv ({\hat{V}}_{1}+{\hat{V}}_{2}+{\hat{V}}_{3})/3\), i.e., \({\hat{V}}_{S}\) with S = {1, 2, 3}.
We set σ2 = 0.1 and L = 100, and consider three values of σ1. In the first scenario, we set σ1 = σ2 = 0.1. For this case, we show the mean and standard deviation of \({\hat{V}}_{2},\, {\hat{V}}_{\{1,\, 2\}},\, {\hat{V}}_{\{1,\, 3\}}\), and \({\hat{V}}_{{{{{{{{\rm{all}}}}}}}}}\) as a function of r in Fig. 4a. Note that the result for \({\hat{V}}_{1}\) is the same as that for \({\hat{V}}_{\{1,\, 3\}}\) except that \(\,{{\mbox{std}}}\,[{\hat{V}}_{1}]\) is 2/(1 + Corr)( > 1) times larger than \(\,{{\mbox{std}}}\,[{\hat{V}}_{\{1,\, 3\}}]\). It is not straightforward to tell from Fig. 4a which signal is better than others. However, we expect that \({\hat{V}}_{2}\) provides a better early warning signal than \({\hat{V}}_{1}\) because the transition of node 2 from the lower to the upper state as r increases from r ≈ − 0.5 is more impending than the transition of nodes 1 and 3. In fact, we obtain \(d({\hat{V}}_{1})=3.52,\, d({\hat{V}}_{2})= 4.72,\, d({\hat{V}}_{\{1,\, 2\}})=5.84,\, d({\hat{V}}_{\{1,\, 3\}})=4.97\), and \(d({\hat{V}}_{{{{{{{{\rm{all}}}}}}}}})=6.77\), verifying this prediction. Furthermore, it is the best to use \({\hat{V}}_{{{{{{{{\rm{all}}}}}}}}}\), i.e., the average of the sample covariance over all nodes.

We set w = 0.05, σ2 = 0.1, and L = 100. a σ1 = 0.1. b σ1 = 0.7. c σ1 = 0.015.
In the second scenario, we set σ1 = 0.7 such that nodes 1 and 3 receive larger dynamical noise than node 2. We show the behavior of the early warning signals in this case in Fig. 4b. The figure indicates that the mean magnitude of any signals including \({\hat{V}}_{1}\) (i.e., \({\hat{V}}_{1,\, 2},\, {\hat{V}}_{1,\, 3}\), and \({\hat{V}}_{{{{{{{{\rm{all}}}}}}}}}\)) is much larger than that of \({\hat{V}}_{2}\). However, this phenomenon does not imply that it is better to use a signal including \({\hat{V}}_{1}\) because the enhanced signal size owes to the increased amount of dynamical noise. We obtain \(d({\hat{V}}_{1})=3.49,\, d({\hat{V}}_{2})=5.49,\, d({\hat{V}}_{\{1,\, 2\}})=3.74,\, d({\hat{V}}_{\{1,\, 3\}})=4.93\), and \(d({\hat{V}}_{{{{{{{{\rm{all}}}}}}}}})=5.10\). Therefore, we suggest that we should only use node 2 as early warning signal under the present scenario because \({\hat{V}}_{2}\) is the least affected by the dynamical noise. Note that the magnitude of \({\hat{V}}_{2}\) in the present scenario is similar to that in the first scenario (see Fig. 4a).
In the third scenario, we set σ1 = 0.015 such that node 2 receives large dynamical noise than nodes 1 and 3. We show the behavior of the early warning signals in this case in Fig. 4c. We find that \(E[{\hat{V}}_{2}]\) is much larger than \(E[{\hat{V}}_{\{1,\, 3\}}](=E[{\hat{V}}_{1}])\), which does not use \({\hat{V}}_{2}\). Note that, the magnitude of \({\hat{V}}_{2}\) is similar to that in the last two scenarios because we kept σ2 = 0.1 in all the three scenarios. We obtain \(d({\hat{V}}_{1})=4.50,\, d({\hat{V}}_{2})=4.69,\, d({\hat{V}}_{\{1,\, 2\}})=4.77,\, d({\hat{V}}_{\{1,\, 3\}})=6.08\), and \(d({\hat{V}}_{{{{{{{{\rm{all}}}}}}}}})=4.84\). Therefore, we suggest that \({\hat{V}}_{\{1,\, 3\}}\) is the best early warning signal under the present scenario. In the second and third scenarios, the best early warning signal turns out to be the one having the smallest mean magnitude at both r = − 0.3 and r = − 0.1.
Numerical results for larger networks and various dynamical systems
We propose to use the node set S maximizing d as the sentinel node set from which we calculate the early warning signal, \({\hat{V}}_{S}\). In the networks with two or three nodes analyzed in the “Coupled nonlinear dynamics on networks with two or three nodes” section, the maximizers of d are composed of nodes with small dynamical noise (i.e., small σi). However, in networks with larger numbers of nodes, it may not be the best to select nodes with small dynamical noise. It is because xi’s of these nodes may be strongly correlated with each other, which typically occurs when these nodes are closely located in the network. In this case, averaging \({\hat{V}}_{i}\) over these nodes, which yields \({\hat{V}}_{S}\), does not help much to reduce the fluctuation, potentially making this \({\hat{V}}_{S}\) a poor early warning signal. Therefore, to test the performance of our method to select the sentinel node set in networks with larger numbers of nodes, we carry out numerical simulations with different networks and dynamical systems in this section.
Setup for numerical simulations
We use six undirected and unweighted networks with N nodes and denote a network’s adjacency matrix by (wij), with wii = 0 and wij = wji ∈ {0, 1} ∀ i, j ∈ {1, …, N}.
Our theory requires the covariance matrix, C, or at least its eigenvalues, estimated at two values of the bifurcation parameter. In the previous sections, we theoretically calculated C by linearizing the original dynamics around the equilibrium and solving the Lyapunov equation given by Eq. (3). However, to know matrix A in Eq. (3), we need to know the term driving the dynamics of the node, i.e., the derivative of F in Eq. (1), which depends on the single node’s intrinsic dynamics and form of the coupling between nodes. However, we usually do not have access to such detailed information given empirical data, while estimating them from observed data is an active research field (e.g., ref. 23). Therefore, we use the sample covariance matrix as an estimator of C. This choice is for simplicity, and there are better estimators of the covariance matrix that are useful especially when the number of samples, L, is small relative to the number of variables, N45; we will discuss this limitation of the present study in the “Discussion” section.
Results for the coupled double-well model
We first consider a coupled double-well model on networks with dynamical noise given by
Equation (26) represents dynamics of species abundance25 or climates in interconnected regions26. Parameters r1, r2, and r3 control the location of the equilibria and satisfy r1 < r2 < r3; D(≥0) is the strength of coupling between nodes, and ui is a constant stress given to the ith node, equivalent to − Δr in Eq. (9). When D or ui ∀ i is sufficiently small, \({{{{{{{\bf{x}}}}}}}}={({x}_{1},\, \ldots,\, {x}_{N})}^{\top }\) in which all the nodes are in their lower state near r1 is the unique stable equilibrium. In contrast, when D or ui ∀ i is sufficiently large, x in which all the nodes are in their upper state near r3 is the unique stable equilibrium. In between, we initially set all the nodes in their lower state at the start of each simulation, and as one gradually increases D or ui, all nodes may flip to the upper stable state at once or in multiple stages28,29.
For this system, we numerically assess the performance of the variance of a single node or its average over the nodes in set S as early warning signal to anticipate the first transition from the lower state to the upper state. We use either ui or D as the bifurcation parameter in a given sequence of simulations. If the bifurcation parameter is ui, we started with D = 0.05 and ui = u = 0 ∀ i and gradually increased u until the first transition occurs (see the Methods section for the precise definition of the transition and parameter values for the numerical simulations). We computed the covariance matrix at reasonably separated two values of u, denoted by u(1) and u(2) (see the Methods section for details). At each of u = u(1) and u = u(2), we collected L = 100 samples of each xi, i ∈ S and calculated d using Eq. (15). As a demonstration, we show how noisy early warning signals gradually increase as we gradually increase u in one series of simulations in Fig. 5. When we select n = 5 nodes uniformly at random, the sample covariance averaged over the nodes in S (i.e., \({\hat{V}}_{S}\)) gradually increases until the first node transits from its lower to the upper state (see the orange line). When we use the set of n = 5 nodes maximizing d, the sensitivity of \({\hat{V}}_{S}\) to the increase in u is notably larger near the first tipping point (see the blue line). Therefore, the maximizer of d provides an apparently better early warning signal than a uniformly randomly selected node set.

Both sentinel node sets are composed of n = 5 nodes. We also show \({x}_{i}^{*}\) for each node at each value of u. We used the coupled double-well dynamics on a BA network with N = 50 nodes and gradually increased u.
We assessed the performance of the sample covariance averaged over the nodes in S using the Kendall’s τ, which is conventionally used13. We evaluated S with n = {1, 2, 3, 4, 5} nodes and also the S composed of all N nodes, which refer to as “all”, as a control. We exhaustively examined all possible S with n = 1 or n = 2 and uniformly randomly sampled 5000 sets of S for each n ∈ {3, 4, 5} due to a large number of combinations. In Supplementary Note 4, we also provide a stopping criterion and a numerical demonstration when one wants to explore S with n > 5 nodes for better solutions (i.e., S with larger d values).
We show the results of one set of simulations on the Barabási-Albert (BA) model network with 50 nodes and average degree 〈k〉 = 3.88 in Fig. 6. We gradually increased u as the bifurcation parameter. Figure 6a shows the relationship between the Kendall’s τ and d when the early warning signal is the variance of a single xi. Each symbol corresponds to a node. We find that the node maximizing d, indicated by the intersection of the two dashed lines, is the third best performer in terms of τ. At each value of n ∈ {2, 3, 4, 5}, the maximizer of d is not the top performer in terms of τ but is a reasonably good performer (see Fig. 6b–e). For example, the pair of nodes attaining the largest d, corresponding to the symbol at the intersection of the two dashed lines in Fig. 6b, provides the eighth best early warning signal among all the N(N − 1)/2 = 1225 pairs of nodes. At each value of n ∈ {1, …, 5}, we find that τ and d are positively correlated; the Pearson correlation coefficient between τ and d is equal to 0.42, 0.46, 0.45, 0.44, and 0.43 for n = 1, 2, 3, 4, and 5, respectively. It should also be noted that both d and τ generally increase as n increases. When all nodes are used, d and τ are the largest (see Fig. 6f). Therefore, in the present case, using all the nodes is a better choice than using particular combinations of n ≤ 5 nodes. However, a reasonably large τ is attained only using n ≤ 5 nodes if we choose appropriate node sets based on d. One can find S that maximizes d only by observing the covariance matrix at two bifurcation parameter values.

We gradually increased u. We considered node sets S with n ∈ {1, 2, 3, 4, 5, N} nodes. a n = 1. b n = 2. c n = 3. d n = 4. e n = 5. f n = N. The τ and d values for the node set maximizing d for each n value are highlighted by the dashed lines. The cross represents “Large SD'', i.e., the node set comprised of the n nodes with the largest sample standard deviation of xi(t).
We quantified the performance of the optimized node set, i.e., the node set that maximizes d at each value of n, using p1 and p2. For a given n, we define p1 as twice the fraction of node sets whose τ is larger than that for the optimized node set. We note that 0 ≤ p1 ≤ 2. We define p2 as \(({\tau }_{\max }-{\tau }^{*})/({\tau }_{\max }-\langle \tau \rangle )\), where 〈τ〉 is the average of τ over all the node sets with n nodes examined, \({\tau }_{\max }\) is the largest (i.e., best) τ value among the node sets with n nodes examined, and τ* is the τ value realized by the maximizer of d with n nodes. Although we have assumed that a larger positive τ is better, the definition of p1 and p2 are similar when the nodes transit from their upper to lower states through tipping points and therefore a larger negative τ implies a better performance of an early warning signal (Supplementary Note 5). If the maximizer of d is the best node set, realizing the largest τ, then both p1 and p2 are equal to 0 and the smallest. Smaller p1 and p2 values are better. If half the node sets are better than the maximizer of d, meaning that the maximizer of d is no better than a uniformly random pick, then we obtain p1 = 1. Similarly, p2 = 1 is equivalent to τ* = 〈τ〉, implying that the maximizer of d is no better than a random pick. If the maximizer of d is the worst performer, we obtain p1 = 2 and a value of p2 larger than 1.
We show in Fig. 7a the p1 and p2 values for the double-well dynamics on the BA network with n ∈ {1, …, 5}. Each small symbol represents the p1 and p2 values for a single series of simulations in which we gradually increased the value of u towards the first transition. Figure 6 shows the relationship between τ and d in one of the 50 series of simulations whose results are shown in Fig. 7a. The larger symbols in Fig. 7 indicate the average over the 50 series of simulations. We find that the optimizer of d is not a top but reasonably good performer because the p1 and p2 values are substantially smaller than 1 in most runs. The performance of the maximizer of d relative to that of uniformly randomly selected node sets with the same number of nodes, n, degrades as n increases.

a Homogeneous stress and homogeneous noise. b Heterogeneous stress and homogeneous noise. c Heterogeneous stress and heterogeneous noise. The smaller symbols show the p1 and p2 values for the individual series of simulations. The larger symbols show the average over 50 series of simulations.
Robustness of node set optimization under different heterogeneity scenarios, networks, dynamical systems, and other factors
To examine the generality of the effectiveness of the node set optimization, we ran simulations, assessed the performance of the early warning signals in terms of the Kendall’s τ, and calculated p1 and p2 for the following variations. First, we have assumed that all nodes are homogeneous except with regard to the position in the network. However, as we examined with Fig. 3a and b, different nodes may have different propensity to tip, yielding a multistage transition for the entire system. To examine this case, we set ui = u + Δui in Eq. (26), where Δui independently obeys the uniform density on [ − 0.25, 0.25]. We continue to use u as the bifurcation parameter. A node with large ui tends to transit from its lower state to the upper state earlier as u gradually increases. Note that a heterogeneous distribution of ui makes it more difficult to find a good node set S only from the information on the network structure. We show the p1 and p2 values when ui is heterogeneous and σi is homogeneous in Fig. 7b. The results are qualitatively the same as those for the case in which both ui and σi are homogeneous (see Fig. 7a). Separately, we also consider the case in which both the node stress ui and the strength of the dynamical noise σi are heterogeneous. We set σi = σ + Δσi, where σ = 0.05, and Δσi independently obeys the uniform density on [ − 0.9σ, 0.9σ]. We show p1 and p2 for this case in Fig. 7c. The results are qualitatively the same as those when both ui and σi are homogeneous (Fig. 7a) and when only ui is heterogeneous (Fig. 7b).
Second, we have considered six networks including the BA model, three of which are model networks and the other three are empirical networks (see Methods for the networks). Third, we have considered four dynamical system models on networks including the coupled double-well dynamics; the other three dynamics are a model of mutualistic interaction dynamics among species46, a gene regulatory system governed by the Michaelis-Menten equation46, and the deterministic approximation of the susceptible-infectious-susceptible (SIS) model on networks47. These four models of dynamics are diverse in the sense that the SIS model shows a transcritical bifurcation to mark the onset of epidemic spreading, while the other three models show saddle-node bifurcations. In addition, we started the mutualistic interaction and gene regulatory dynamics from the upper state for each node and gradually decreased the bifurcation parameter value, which is the opposite to the case of the double-well and SIS dynamics. This is because the loss of resilience such as species loss in mutualistic dynamics and cell death in gene regulatory dynamics is of a practical concern for these dynamical systems46. Fourth, we also varied D instead of u as bifurcation parameter until the first bifurcation occurs. For the SIS model, we only considered an equivalent to D, which is the infection rate parameter, but not u because introducing and varying u is unrealistic for the SIS model; see Methods for the discussion.
We show the p1 and p2 values for n ∈ {1, …, 5}, the three different scenarios for ui and σi (i.e., constant across all nodes or heterogeneous), two networks, four different dynamical systems, and two different bifurcation parameters (i.e., u or D) in Fig. 8. Each figure panel contains the average of p1 and p2 over 50 series of simulations for the three scenarios of heterogeneity (i.e., both ui and σi are homogeneous, only ui is heterogeneous, and both of them are heterogeneous) for one network and one dynamical system. Note that Fig. 8a is for the double-well dynamics on the BA network, corresponding to Figs. 6 and 7. We find that the node set based on the largest d value performs reasonably well for the two networks (see Fig. 8a–g for the BA network and Fig. 8h–n for the Chesapeake Bay carbon flow network) and for all the four models of dynamics. The node set maximizing d tends to work better relative to uniformly randomly picked node sets, yielding smaller p1 and p2 values, when ui and σi are both heterogeneous across the nodes (shown by the dotted lines) than when either ui or σi is homogeneous (shown by the solid and dashed lines). This is presumably because the proposed method actively discards nodes with high intrinsic noise by comparing the distribution of the signal variance at two values of the bifurcation parameter. The node set maximizing d tends to work better relative to uniformly random node sets with the same number of nodes, n, when n is smaller. However, even at n = 5, the p1 and p2 values are at most approximately 0.7 and much smaller in a majority of cases. The results are qualitatively the same for the other four networks, with a caveat that the maximizer of d performs poorly for the gene regulatory dynamics model on some networks (see Supplementary Note 6).

The squares and circles represent p1 and p2, respectively, for the given n, dynamics, network, and condition (i.e., whether ui or σi is homogeneously or heterogeneously distributed) averaged over 50 series of simulations. a–g BA network. h–n Chesapeake Bay carbon flow network. The panels on the leftmost column correspond to the double-well dynamics, and the second to the fourth columns to the mutualistic interaction, gene regulatory, and SIS dynamics, respectively. The combination of the dynamics model and bifurcation parameter is as follows. (a, h): double-well, u. (b, i): mutualistic interaction, u. (c, j): gene regulatory, u. (d, k): double-well, D. (e, l): mutualistic interaction, D. (f, m): gene regulatory, D. (g, n): SIS, λ.
We also carried out the following robustness tests.
Our choice of the two bifurcation parameter values at which we sample the covariance matrix and then calculate d (see Methods for the definition of the two bifurcation parameter values) has been arbitrary. We used one bifurcation parameter value close to the start of each series of simulation and the other value close to the first tipping point, regardless of the type of bifurcation. This is because, with this choice, the difference between μ1 and μ2, which is the numerator of d (see Eq. (15)), is larger than when the two bifurcation parameter values are closer. Then, the contrast of d for different choices of S may be larger, potentially helping to single out the S that maximizes d. To test the robustness of our results with respect to the choice of the two bifurcation parameter values, we measured p1 and p2 for various pairs of the bifurcation parameter value, which are different in terms of the separation between the two values and the closeness to the first tipping point. For the three scenarios for ui and σi (i.e., constant across all nodes or heterogeneous), six networks, four dynamical systems, and two bifurcation parameters (i.e., u or D), we have found that the result that p1 and p2 are small in most cases is robust. Specifically, p1 and p2 are considerably smaller than 1 when they are so for the original pairs of the bifurcation parameter value, the two bifurcation parameter values are not too close to each other, and the larger bifurcation parameter value is reasonably close to the first tipping point. (See Supplementary Note 2 for the numerical results.)
Not all the regime shifts accompany critical slowing down. Early warning signals based on critical slowing down, including \({\hat{V}}_{S}\) for any node set S, should be insensitive to such types of regime shifts1,11,14,48. To verify that this is the case, we investigated coupled double-well dynamics on the BA network experiencing a state transition from the lower to the upper state of xi(t) driven by either dynamical noise or impulse input given to xi(t)’s. Dynamical noise and impulse input are two major scenarios in which regime shifts occur without critical slowing down11,14. It should be noted that, in both scenarios, all the system parameter values remain the same throughout a simulation. As expected, \({\hat{V}}_{S}\) is found to be insensitive to impending regime shifts until they are about to occur, and therefore, τ is close to 0. These results hold true for any choice of S, and the S maximizing d does not yield a particularly large τ value. See Supplementary Note 7 for details.
In contrast to the last case, critical slowing down can occur even when there is no sudden regime shift. Representative examples of this phenomenon are transcritical and Hopf bifurcations14,49. The gene regulatory and SIS models that we have employed show transcritical bifurcations, at least in well-mixed populations. We showed that \({\hat{V}}_{S}\) increases just before the bifurcation, which is captured by large τ values, in the gene regulatory and SIS models (see Supplementary Note 8 for numerical evidence). Therefore, consistent with the previous studies14,49, we are not claiming that \({\hat{V}}_{S}\) specifically increases when a bifurcation accompanying a large regime shift, which is typically a saddle-node bifurcation, is being approached.
Last, we derived theory for the variance of xi(t) and its average over nodes for mathematical convenience. However, the standard deviation of xi(t) rather than the variance of xi(t) is also a common early warning signal for anticipating tipping points13,50,51. We verified that the results on the advantage of the maximizer of d remained almost the same when we used the average of the sample standard deviation of xi(t) over i ∈ S as the early warning signal (see Supplementary Note 9).
Comparison with other node selection methods
A simple heuristic to select a node set for constructing early warning signals by averaging is to use the n nodes with the largest standard deviation of xi29, which we refer to as “Large SD”. While there are also other strategies to select node sets, here we compare ours with Large SD because the measurement of the standard deviation of xi does not require the information about the network structure, and therefore it is fair to compare Large SD and the present method. The crosses in Fig. 6 indicate the Kendall’s τ value for the double-well dynamics on the BA network when we use the n nodes with the largest standard deviation to calculate the early warning signal. Large SD detects the best single node, which the maximization of d does not (see Fig. 6a), Large SD also outperforms the maximizer of d, yielding larger τ values, when n ∈ {2, 3, 4, 5} (see Fig. 6b–e), whereas the advantage of Large SD is marginal for n = 5. Therefore, when ui and σi are homogeneous, Large SD beats the maximizer of d, at least for this example. However, the maximizer of d usually behaves much better than Large SD when σi is heterogeneous. Figure 9 shows an example. In this figure, we used the double-well dynamics on the BA network, as we did for Fig. 6, and assumed that both ui and σi are heterogeneous. The figure indicates that the maximizer of d substantially outperforms Large SD except when n = 4 and n = 5, for which the maximizer of d only slightly outperforms Large SD. The compromised performance of Large SD in this scenario is because Large SD tends to select nodes with large σi although a large σi value simply reflects that the ith node is inherently noisier than others.

The network is the same as the one used in Fig. 6. We considered node sets S with n ∈ {1, 2, 3, 4, 5, N} nodes. a n = 1. b n = 2. c n = 3. d n = 4. e n = 5. f n = N. The τ and d values for the node set maximizing d are highlighted by the dashed lines. The cross represents “Large SD'', i.e., the node set comprised of the n nodes with the largest sample standard deviation of xi(t).
To compare between the maximizer of d and Large SD more systematically, we compared the Kendall’s τ values attained by these two strategies for the six networks, the four dynamics models, and whether the stress or dynamical noise is homogeneous or heterogeneous across the nodes. As we show in Supplementary Note 8, we confirmed that the maximizer of d outperforms Large SD in a majority of cases when both the stress, ui, and the noise strength, σi, are node-dependent. The maximizer of d outperforms Large SD even when σi is node-independent for the mutualistic interaction dynamics and D being used as the bifurcation parameter. In the other cases, the maximizer of d is either on par with or slightly inferior to Large SD. However, there is no case in which Large SD substantially outperforms the maximizer of d (i.e., Large SD outperforms the maximizer of d in terms of τ by at most ≈ 0.078), whereas the maximizer of d often substantially outperforms Large SD.
Furthermore, we compared the maximizer of d with another heuristic algorithm with which one selects the n nodes that receive the highest total input (or lowest total input, depending on the direction of the bifurcation being considered) from the other nodes near the bifurcation point29, which we refer to as “High/Low Input”. The results of comparison between the maximizer of d and High/Low Input were similar to the case of the comparison between the maximizer of d and Large LD (see Supplementary Note 10 for the methods and results). In other words, the maximizer of d tends to be better than the High/Low Input algorithm, in particular when the nodes’ dynamics are assumed to be heterogeneous. We note that High/Low Input requires the adjacency matrix of the network, i.e., complete information on the network structure, which neither the maximizer of d nor Large SD requires.
Discussion
Based on theory of OU processes, we proposed an objective function d for identifying sets of nodes, S, that are expected to reliably alert impending tipping events when we combine the early warning signals from S by averaging. While we focused on anticipating the first bifurcation in the entire network, the proposed method is equally applicable to anticipating the second and later transitions in the case of multistage transitions in which different nodes experience regime shifts at different timings11,25,26,27,28,29. We numerically demonstrated the proposed method with various dynamics models, networks, and system heterogeneity scenarios to confirm its good performances. Application to domain-specific problems such as in ecology, climate dynamics, and disease progression is saved for future work. In these and other applications, further complexity of systems in question in addition to the network structure and nonlinearity that we have neglected, such as the mixture of positive and negative interactions18 and nonequilibrium dynamics32, may require alternations of our method, posing further research questions.
Nonetheless, our method is readily applicable to empirical data because it does not require the information about the network structure or the dynamical model equations. It only requires the covariance matrix among the observables measured at two values of the bifurcation parameter, or two different states of the networked system, to determine an optimal sentinel node set, S. In ecological52,53 and psychopathological54 applications of early warning signals, it is customary to calculate fluctuation-based early warning signals such as the variance or covariance from multivariate time series data with sliding time windows, thus obtain time series of early warning signals, and use them to give alerts for impending tipping points. To apply our methods to empirical multivariate time series data, once one has determined S as the maximizer of d, one only needs to collect signals from the nodes in S in each of the sliding time windows, calculate the early warning signal (i.e., \({\hat{V}}_{S}\)), and monitor it.
The proposed method tended to outperform other heuristics when the amount of dynamical noise depended on nodes. The assumption of heterogeneous noise, also made in a previous analytical study24, is probably realistic because the nodes constituting a complex dynamical system correspond to different species or geographical patches in ecosystems, different genes or symptoms in complex systems of diseases, different firms or countries in a financial network, and so on. Although it is not easy to measure dynamical noise for each node in isolation in empirical complex systems, there is no a priori reason to assume that different nodes are subject to the same amount of intrinsic noise. As we have shown, heterogeneous noise across nodes generally confuses early warning signals estimated from observed data because, in heterogeneous noise cases, a larger variance of an xi does not imply that xi provides a better early warning signal. We overcame this problem by quantifying fluctuations of the early warning signal, not just fluctuations of xi, and measuring it at two bifurcation parameter values. We propose that we should observe the system at two sufficiently distant bifurcation parameter values (practically, two distant times) for identifying good early warning signals. The early warning signals at nodes whose fluctuation is large due to large intrinsic noise do not substantially grow between the two bifurcation parameter values. In contrast, the early warning signals at nodes closely approaching their tipping point substantially grow between the two bifurcation parameter values. An alternative strategy is to use lagged autocorrelation as early warning signal because nodes with large intrinsic noise may produce small autocorrelation. Autocorrelation of multivariate OU processes is analytically tractable, whereas it is more complicated than the variance and covariance37. Analysis of autocorrelation and its average over nodes as early warning signals with the present theoretical framework warrants future work.
In numerical simulations, we examined the size of the node set n ∈ {1, …, 5}. For n = 1 and 2, we inspected all the node sets for their performance and d values. In contrast, we randomly sampled node sets for n ≥ 3 due to the combinatorial explosion. If the number of nodes, N, is less than approximately 20, it may be feasible to exhaustively investigate all the node sets across all values of n to find the exact maximizer of d. Note that the calculation of a single d only involves the square and summation of the entry of the N × N covariance matrix and therefore is not costly. When N is larger, we need to find node sets that only approximately maximize d. This combinatorial problem has scarcely been discussed in early warning signal research community. It is because prior studies highlighting that different nodes can emit early warning signals of different quality either used systems with a small number of nodes, typically with N ≤ 519,21,22,23,24, or linearly ranked the N nodes20,27,29, thus implicitly abandoning the potential benefit of wisely combining different nodes. However, real-world complex systems whose tipping events are of practical interest are more often than not larger complex networks17,18. Although we provided a stopping criterion for exploring different n values and gave a demonstration (see Supplementary Note 4), further deploying heuristics for combinatorial optimization to approximate maximization of d for reasonably large n and N is left for future work.
We used the sample covariance matrix as the estimator of the true covariance matrix for simplicity. In fact, although the sample covariance matrix is an unbiased estimator in the limit of L → ∞, it is an unreliable estimator when L is small relative to N, and there are better choices such as different sparse estimators and covariance shrinkage methods45. In the present study, the sample covariance matrix is not problematic because we used a relatively small N and large L. However, in practical situations, we may only have a small number of samples, in which case one should consider a different covariance estimator. Furthermore, we confined ourselves to linear combinations of early warning signals measured at single nodes. However, a natural extension is to exploit covariance of xi and xj, where i ≠ j, to construct early warning signals. Examples of such early warning signals include the leading eigenvalue of the covariance matrix21,55,56 and Moran’s I 57,58,59. It should be noted that we used the cross covariance, \({C}_{ij}^{(1)}\) and \({C}_{ij}^{(2)}\), where i ≠ j, only to evaluate the uncertainty of our early warning signals, not to construct early warning signals. Early warning signals for heterogeneous networks when the number of samples is limited are a challenging open question.
Methods
Dynamical system models
We used the following four types of dynamics on networks with dynamical noise.
A coupled double-well model on networks with dynamical noise is given by Eq. (26). We set (r1, r2, r3) = (1, 3, 5). In the presence of coupling (i.e., D > 0), the lower and the upper state of each node is around xi = r1 and xi = r3, respectively. Here we succinctly regard that the nodes with xi < r2 and xi ≥ r2 are in the lower and the upper state, respectively. We set ui = u + Δui ∀ i. If u is the bifurcation parameter, we initially set u = 0 and D = 0.05. If D is the bifurcation parameter, we initially set u = 0 and D = 0. In the case of homogeneous stress, we set Δui = 0 ∀ i. In the case of heterogeneous stress, we draw each Δui independently from the uniform density on [ − 0.25, 0.25] for this and the following three models of dynamics. We set σi = σ + Δσi, where σ = 0.05 for this model. We set Δσi = 0 ∀ i in the homogeneous noise case and draw Δσi from the uniform density on [ − 0.9σ, 0.9σ] in the heterogeneous noise case, including for the other three dynamical system models described in the remainder of this section.
The mutualistic interaction dynamics among species is given by
where xi represents the abundance of the ith species, and \({B}_{i},\, {C}_{i},\, {\tilde{D}}_{i},\, {E}_{i},\, {H}_{i}\), and Ki (with i ∈ {1, …, N}) are constants46. Constant Bi represents the migration rate of the ith species from outside the entire ecosystem. The second term on the right-hand side of Eq. (27) represents the logistic growth with carrying capacity Ki and Allee constant Ci. The third term represents the mutualistic effect of the jth species on the ith species under the assumption that wij ≥ 0. This term is bounded by definition for preventing xi to exceed Ki to break down the logistic growth nature of the second term. We set \({B}_{i}=0.1+u+\Delta {u}_{i},\, {C}_{i}=1,\, {\tilde{D}}_{i}=5,\, {E}_{i}=0.9,\, {H}_{i}=0.1\), and Ki = 5 ∀ i ∈ {1, …, N}, following ref. 46. Regardless of whether u or D is the bifurcation parameter, we initially set u = 0 and D = 1. We confirmed that all xi were in their upper state (i.e., ≫ 0) at equilibrium when (u, D) = (0, 1). We set σi = σ + Δσi with σ = 0.25.
The gene regulatory dynamics is given by
where xi represents the expression level of the ith gene46. We set B = 1, f = 1, and h = 2 by following ref. 46, and also ui = u + Δui. Regardless of whether u or D is the bifurcation parameter, we initially set u = 0 and D = 1. Then, we obtain xi > 0.1 ∀ i at equilibrium if the initial values of xi ∀ i are sufficiently large, which we assume. We set σi = σ + Δσi, where σ = 5 × 10−6.
The SIS dynamics on networks with dynamical noise is given by
where xi represents the probability that the ith node is infectious, λ is the infection rate (specifically, the rate at which the ith node is infected by an infectious neighbor) and is equivalent to D in the coupled double-well, mutualistic interaction, and gene regulatory dynamics models, and μ is the recovery rate. The first term on the right-hand side of Eq. (29) represents that the jth node infects the ith node. The second term represents the recovery of the ith node. We set μ = 1 without loss of generality; multiplying λ, μ, and σi by the same positive constant is equivalent to changing the time scale and not to change these parameter values. For this model, we only use λ as the bifurcation parameter. This is because adding a term uidt on the right-hand side of Eq. (29) would imply that infectious individuals can spontaneously appear in the population in the absence of any infected host, which is unrealistic. For the same reason, we do not have a concept of heterogeneous node stress in this model. We initially set λ = 0. In the absence of dynamical noise, it holds true that 0 ≤ xi < 1 ∀ i at equilibrium. We set σi = σ + Δσi, where σ = 5 × 10−4.
Networks
We used the following three model networks and three empirical networks in our numerical simulations. All networks are undirected and unweighted by construction, or coerced to be so.
The first network was generated by the Erdős-Rényi random graph with 50 nodes and exactly 125 edges. We connected a uniformly randomly selected pair of nodes that had not yet been adjacent to each other, one by one, until we had 125 edges. It happened that the generated network was connected. By construction, the average degree 〈k〉 = 5.
The second network is a network generated by the BA model with N = 50 nodes. We set the number of edges per each additional node to m = 2. The initial condition was the complete graph with 3 nodes (i.e., triangle). In the limit N → ∞, the model produces a degree distribution with a power-law tail, i.e., p(k) ∝ k−3, where k is the degree, and p(k) is the probability that the degree is equal to k. The resulting network was connected and had 97 edges, yielding 〈k〉 = 3.88.
The third network is the largest connected component of the node fitness model proposed by refs. 60,61,62. This model produces networks with heterogeneous degree distributions as follows. We start with an empty network with N = 50 nodes and assign to each node i a fitness score \({f}_{i}={(i+{i}_{0}-1)}^{-\alpha }\), where α is a parameter that controls the heterogeneity of the degree distribution, and \({i}_{0}={N}^{1-\frac{1}{\alpha }}{[10\sqrt{2}(1-\alpha )]}^{\frac{1}{\alpha }}\) constrains the maximum degree. We set α = 2. Then, we independently connect each pair of nodes (i, j) by an edge with probability \({f}_{i}\,{f}_{j}/{(\mathop{\sum }\nolimits_{\ell=1}^{N}{f}_{\ell })}^{2}\). We took the largest connected component of the resulting network, which included N = 49 nodes and 125 edges, yielding 〈k〉 = 5.1.
The fourth network is a record of carbon flows in the Chesapeake Bay marine ecosystem63. The original carbon flow data is directed and forms a connected network. We used the undirected, unweighted version of the network stored by the Koblenz Network Collection64. This network has 39 nodes, 170 edges, and 〈k〉 = 8.72.
The fifth network is the food web of a freshwater stream collected in southern New Zealand65. Two species are connected if there was evidence of one consuming the other. The original data is a directed and unweighted network with 49 nodes and 110 edges66. We coerced the network to be undirected and retained the largest connected component, resulting in a network with 48 nodes, 110 edges, and 〈k〉 = 4.58
The sixth network is a social network of wild dolphins observed in Doubtful Sound, New Zealand67. The network is connected, undirected, and unweighted, with 62 nodes, 159 edges, and 〈k〉 = 5.13.
Calculation and performance assessment of early warning signals
We conducted 50 independent series of simulations for each combination of dynamics model, network, and whether both node stress (i.e., ui) and noise strength (i.e., σi) were homogeneous, only ui was heterogeneous, or both ui and σi were heterogeneous. Each series consisted of simulations at linearly increasing values of a bifurcation parameter in the case of the double-well or SIS dynamics, and linearly decreasing values of a bifurcation parameter in the case of the mutualistic interaction or gene regulatory dynamics. When we moved to a next value of the bifurcation parameter, we increased it by Δu = 0.025 or ΔD = 0.0025 for the double-well dynamics, decreased it by Δu = 0.1 or ΔD = 0.01 for the mutualistic interaction dynamics, decreased it by Δu = 0.01 or ΔD = 0.01 for the gene regulatory dynamics, and increased it by Δλ = 0.0025 for the SIS dynamics.
Each simulation given the dynamics model began from the same value of xi ∀ i (double-well: xi = 1, mutualistic interaction: xi = 5, gene regulatory: xi = 5, SIS: xi = 0.001) regardless of the bifurcation parameter value. We used the Euler-Maruyama method with Δt = 0.01 to simulate each dynamics. In the SIS and gene regulatory dynamics, whenever we obtain a negative value of xi(t) for any i due to dynamical noise, we reset xi(t) = 0. We allowed 100 generic time units (TU) to discard transients, except in the case of the mutualistic dynamics, for which we allowed 10 TU due to a shorter characteristic time scale of the mutualistic dynamics model. After discarding transients, we considered the system at equilibrium and took L = 100 evenly spaced samples from each xi(t), i ∈ {1, 2, …, N}; samples were spaced 1 TU apart, with the exception of the mutualistic dynamics model for which the samples were spaced 0.1 TU apart. We stopped a series of simulations with a gradually changing bifurcation parameter value once any xi was no longer near its initial state, specifically, once any xi satisfies the following condition: xi ≥ 3 for the double-well dynamics, xi < 0.1 for the mutualistic interaction dynamics, xi < 0.1 for the gene regulatory dynamics, and xi ≥ 0.1 for the SIS dynamics.
After all simulations in a given series were complete, we calculated the early warning signals for each node set S with ∣S∣ = n, based on the L samples taken at each value of the bifurcation parameter. In addition, to calculate d, we used Eq. (5) to obtain \({\mu }_{1}=\frac{1}{n}\mathop{\sum }\nolimits_{i=1}^{n}{C}_{ii}^{(1)}\) and \({\mu }_{2}=\frac{1}{n}\mathop{\sum }\nolimits_{i=1}^{n}{C}_{ii}^{(2)}\), and Eq. (6) to obtain \({{{\mbox{var}}}}_{1}=\frac{2}{{n}^{2}(L-1)}\mathop{\sum }\nolimits_{i=1}^{n}\mathop{\sum }\nolimits_{j=1}^{n}{({C}_{ij}^{(1)})}^{2}\) and \({{{\mbox{var}}}}_{2}=\frac{2}{{n}^{2}(L-1)}\mathop{\sum }\nolimits_{i=1}^{n}\mathop{\sum }\nolimits_{j=1}^{n}{({C}_{ij}^{(2)})}^{2}\). Then, we used Eq. (15) to calculate d for the node set S. Note that this computation is easy once we have calculated C(1) and C(2). We selected the two values of the bifurcation parameter at which we calculated C(1) and C(2) as follows. Suppose that the bifurcation parameter is u and that we have simulated the dynamics at \(u={\overline{u}}_{k},\, k\in \{1,\, 2,\, \ldots,\, \tilde{K}\}\). Thus, the simulation with \({\overline{u}}_{\tilde{K}}\) was the last simulation in which all xi remained near their initial state at equilibrium. We selected \({k}^{(1)}=\,{{\mbox{round}}}\,(0.1\tilde{K})\) and \({k}^{(2)}=\,{{\mbox{round}}}\,(0.9\tilde{K})\), where round() denotes rounding to the closest integer. Then, we calculated C(1) and C(2) from the L samples obtained at \(u={u}^{(1)}\equiv {\overline{u}}_{{k}^{(1)}}\) and \(u={u}^{(2)}\equiv {\overline{u}}_{{k}^{(2)}}\), respectively. We followed the same procedure to select the two values of D at which we calculated C(1) and C(2) when the bifurcation parameter was D.
In addition to by maximizing d, we also determined node set S by the Large SD algorithm29 for comparison purposes, which proceeds as follows. First, we collected L samples from each xi(t) at u = u(2) (or D = D(2) when D instead of u was the bifurcation parameter) and calculated its sample standard deviation. Second, we defined S as the set of the n nodes with the largest sample standard deviation of xi(t). Third, we averaged the sample standard deviation of xi(t) over i ∈ S and used it as early warning signal.
We quantify the extent to which a given node set S signals the proximity of tipping by the Kendall’s τ rank correlation between the early warning signal (i.e., the sample variance averaged over the nodes in S unless we state otherwise) and the bifurcation parameter13. Because of critical slowing down, the variance of xi(t) grows large as the dynamical system approaches a tipping point1. In our simulations, when the bifurcation parameter linearly increases (i.e., double-well and SIS dynamics), the value of a perfect early warning signal would monotonically increase, resulting in τ = 1. When the bifurcation parameter linearly decreases (i.e., mutualistic interaction and gene regulatory dynamics), a perfect early warning signal yields τ = − 1.
Reporting summary
Further information on research design is available in the Nature Portfolio Reporting Summary linked to this article.
Data availability
The numerical data that are generated during the current study and underlie the figures in this article are available on Github at https://github.com/ngmaclaren/mixing-EWS.
Code availability
The code for generating the results and figures in this article is publicly available on Github at https://github.com/ngmaclaren/mixing-EWS.
References
Scheffer, M. et al. Early-warning signals for critical transitions. Nature 461, 53–59 (2009).
Scheffer, M., Carpenter, S. R., Dakos, V. & Van Nes, E. H. Generic indicators of ecological resilience: Inferring the chance of a critical transition. Annu. Rev. Ecol. Evol. Syst. 46, 145–167 (2015).
Liu, Y., Kumar, M., Katul, G. G. & Porporato, A. Reduced resilience as an early warning signal of forest mortality. Nat. Clim. Change 9, 880–885 (2019).
Wunderling, N. et al. Recurrent droughts increase risk of cascading tipping events by outpacing adaptive capacities in the Amazon rainforest. Proc. Natl. Acad. Sci. USA 119, e2120777119 (2022).
Southall, E., Brett, T. S., Tildesley, M. J. & Dyson, L. Early warning signals of infectious disease transitions: A review. J. R. Soc. Interface 18, 20210555 (2021).
van de Leemput, I. A. et al. Critical slowing down as early warning for the onset and termination of depression. Proc. Natl. Acad. Sci. USA 111, 87–92 (2014).
Helmich, M. A. et al. Early warning signals and critical transitions in psychopathology: Challenges and recommendations. Current Opin. Psychol. 41, 51–58 (2021).
Dablander, F., Pichler, A., Cika, A. & Bacilieri, A. Anticipating critical transitions in psychological systems using early warning signals: Theoretical and practical considerations. Psychol. Methods 28, 765–790 (2023).
Liu, X. et al. Detection for disease tipping points by landscape dynamic network biomarkers. Nat. Sci. Rev. 6, 775–785 (2019).
Aihara, K., Liu, R., Koizumi, K., Liu, X. & Chen, L. Dynamical network biomarkers: Theory and applications. Gene 808, 145997 (2022).
Scheffer, M. et al. Anticipating critical transitions. Science 338, 344–348 (2012).
Boettiger, C. & Hastings, A. Early warning signals and the prosecutor’s fallacy. Proc. R. Soc. B 279, 4734–4739 (2012).
Dakos, V. et al. Methods for detecting early warnings of critical transitions in time series illustrated using simulated ecological data. PLoS ONE 7, e41010 (2012).
Boettiger, C., Ross, N. & Hastings, A. Early warning signals: The charted and uncharted territories. Theor. Ecol. 6, 255–264 (2013).
Dakos, V., Carpenter, S. R., van Nes, E. H. & Scheffer, M. Resilience indicators: Prospects and limitations for early warnings of regime shifts. Phil. Trans. R. Soc. B 370, 20130263 (2015).
Liu, X. et al. Network resilience. Phys. Rep. 971, 1–108 (2022).
Scheffer, M. et al. Quantifying resilience of humans and other animals. Proc. Natl. Acad. Sci. USA 115, 11883–11890 (2018).
Kéfi, S., Saade, C., Berlow, E. L., Cabral, J. S. & Fronhofer, E. A. Scaling up our understanding of tipping points. Phil. Trans. R. Soc. B 377, 20210386 (2022).
Boerlijst, M. C., Oudman, T. & de Roos, A. M. Catastrophic collapse can occur without early warning: Examples of silent catastrophes in structured ecological models. PLoS ONE 8, e62033 (2013).
Dakos, V. & Bascompte, J. Critical slowing down as early warning for the onset of collapse in mutualistic communities. Proc. Natl. Acad. Sci. USA 111, 17546–17551 (2014).
Dakos, V. Identifying best-indicator species for abrupt transitions in multispecies communities. Ecol. Ind. 94, 494–502 (2018).
Weinans, E. et al. Finding the direction of lowest resilience in multivariate complex systems. J. R. Soc. Interface 16, 20190629 (2019).
Ghadami, A., Chen, S. & Epureanu, B. I. Data-driven identification of reliable sensor species to predict regime shifts in ecological networks. R. Soc. Open Sci. 7, 200896 (2020).
Patterson, A. C., Strang, A. G. & Abbott, K. C. When and where we can expect to see early warning signals in multispecies systems approaching tipping points: Insights from theory. Am. Nat. 198, E12–E26 (2021).
Lever, J. J. et al. Foreseeing the future of mutualistic communities beyond collapse. Ecol. Lett. 23, 2–15 (2020).
Wunderling, N., Gelbrecht, M., Winkelmann, R., Kurths, J. & Donges, J. F. Basin stability and limit cycles in a conceptual model for climate tipping cascades. New J. Phys. 22, 123031 (2020).
Aparicio, A., Velasco-Hernández, J. X., Moog, C. H., Liu, Y.-Y. & Angulo, M. T. Structure-based identification of sensor species for anticipating critical transitions. Proc. Natl. Acad. Sci. USA 118, e2104732118 (2021).
Kundu, P., MacLaren, N. G., Kori, H. & Masuda, N. Mean-field theory for double-well systems on degree-heterogeneous networks. Proc. R. Soc. A 478, 20220350 (2022).
MacLaren, N. G., Kundu, P. & Masuda, N. Early warnings for multi-stage transitions in dynamics on networks. J. R. Soc. Interface 20, 20220743 (2023).
Chen, L., Liu, R., Liu, Z.-P., Li, M. & Aihara, K. Detecting early-warning signals for sudden deterioration of complex diseases by dynamical network biomarkers. Sci. Rep. 2, 342 (2012).
Vafaee, F. Using multi-objective optimization to identify dynamical network biomarkers as early-warning signals of complex diseases. Sci. Rep. 6, 22023 (2016).
Medeiros, L. P., Allesina, S., Dakos, V., Sugihara, G. & Saavedra, S. Ranking species based on sensitivity to perturbations under non-equilibrium community dynamics. Ecol. Lett. 26, 170–183 (2023).
Van Kampen, N. G. Stochastic Processes in Physics and Chemistry, 3rd edn (Elsevier, Amsterdam, The Netherlands, 2007).
Pernice, V., Staude, B., Cardanobile, S. & Rotter, S. How structure determines correlations in neuronal networks. PLoS Comput. Biol. 7, e1002059 (2011).
Kiss, I. Z., Miller, J. C. & Simon, P. L. Mathematics of Epidemics on Networks (Springer, Cham, Switzerland, 2017).
Koizumi, K. et al. Identifying pre-disease signals before metabolic syndrome in mice by dynamical network biomarkers. Sci. Rep. 9, 8767 (2019).
Gardiner, C. Stochastic Methods, 4th edn (Springer-Verlag, Berlin, 2009).
Gajić, Z. & Qureshi, M. T. J. Lyapunov Matrix Equation in System Stability and Control (Academic Press, San Diego, CA, USA, 1995).
Carpenter, S. R. & Brock, W. A. Rising variance: A leading indicator of ecological transition. Ecol. Lett. 9, 311–318 (2006).
Harris, M. J., Hay, S. I. & Drake, J. M. Early warning signals of malaria resurgence in Kericho, Kenya. Biology Letters 16, 20190713 (2020).
Boers, N. Observation-based early-warning signals for a collapse of the Atlantic Meridional Overturning Circulation. Nat. Clim. Change 11, 680–688 (2021).
Weinans, E., Quax, R., van Nes, E. H. & van de Leemput, I. A. Evaluating the performance of multivariate indicators of resilience loss. Sci. Rep. 11, 9148 (2021).
Kuznetsov, Y. A. Elements of Applied Bifurcation Theory, 2nd edn (Springer-Verlag, NY, USA, 1998).
Abou-Moustafa, K. T., De La Torre, F. & Ferrie, F. P. Designing a metric for the difference between Gaussian densities. In Advances in Intelligent and Soft Computing, vol. 83, 57–70 (Springer-Verlag, Berlin, Germany, 2010).
Bun, J., Bouchaud, J. P. & Potters, M. Cleaning large correlation matrices: Tools from Random Matrix Theory. Phys. Rep. 666, 1–109 (2017).
Gao, J., Barzel, B. & Barabási, A. L. Universal resilience patterns in complex networks. Nature 530, 307–312 (2016).
Pastor-Satorras, R., Castellano, C., Van Mieghem, P. & Vespignani, A. Epidemic processes in complex networks. Rev. Mod. Phys. 87, 925–979 (2015).
Hastings, A. & Wysham, D. B. Regime shifts in ecological systems can occur with no warning. Ecol. Lett. 13, 464–472 (2010).
Kéfi, S., Dakos, V., Scheffer, M., Van Nes, E. H. & Rietkerk, M. Early warning signals also precede non-catastrophic transitions. Oikos 122, 641–648 (2013).
Boettner, C., Klinghammer, G., Boers, N., Westerhold, T. & Marwan, N. Early-warning signals for Cenozoic climate transitions. Quater. Sci. Rev. 270, 107177 (2021).
O’Brien, D. A. & Clements, C. F. Early warning signal reliability varies with COVID-19 waves. Biol. Lett. 17, 20210487 (2021).
Gsell, A. S. et al. Evaluating early-warning indicators of critical transitions in natural aquatic ecosystems. Proc. Natl. Acad. Sci. USA 113, E8089–E8095 (2016).
Wilkinson, G. M. et al. Early warning signals precede cyanobacterial blooms in multiple whole-lake experiments. Ecol. Monog. 88, 188–203 (2018).
Wichers, M., Groot, P. C. & Psychosystems, E., EWS Group. Critical slowing down as a personalized early warning signal for depression. Psychother. Psychosomatics 85, 114–116 (2016).
Brock, W. A. & Carpenter, S. R. Variance as a leading indicator of regime shift in ecosystem services. Ecol. Soc. 11, 9 (2006).
Chen, S., O’Dea, E. B., Drake, J. M. & Epureanu, B. I. Eigenvalues of the covariance matrix as early warning signals for critical transitions in ecological systems. Sci. Rep. 9, 2572 (2019).
Dakos, V., van Nes, E. H., Donangelo, R., Fort, H. & Scheffer, M. Spatial correlation as leading indicator of catastrophic shifts. Theor. Ecol. 3, 163–174 (2010).
Kéfi, S. et al. Early warning signals of ecological transitions: Methods for spatial patterns. PLoS ONE 9, e92097 (2014).
Jentsch, P. C., Anand, M. & Bauch, C. T. Spatial correlation as an early warning signal of regime shifts in a multiplex disease-behaviour network. J. Theor. Biol. 448, 17–25 (2018).
Goh, K. I., Kahng, B. & Kim, D. Universal behavior of load distribution in scale-free networks. Phys. Rev. Lett. 87, 278701 (2001).
Chung, F. & Lu, L. Connected components in random graphs with given expected degree sequences. Ann. Combinatorics 6, 125–145 (2002).
Cho, Y. S., Kim, J. S., Park, J., Kahng, B. & Kim, D. Percolation transitions in scale-free networks under the Achlioptas process. Phys. Rev. Lett. 103, 135702 (2009).
Baird, D. & Ulanowicz, R. E. The seasonal dynamics of the Chesapeake Bay ecosystem. Ecol. Monogr. 59, 329–364 (1989).
Kunegis, J. KONECT: The Koblenz network collection. In Proceedings of the 22nd International Conference on World Wide Web, 1343–1350 (2013).
Thompson, R. M. & Townsend, C. R. Energy availability, spatial heterogeneity and ecosystem size predict food-web structure in streams. Oikos 108, 137–148 (2005).
Interaction Web DataBase. http://www.ecologia.ib.usp.br/iwdb/html/thomps_towns.html. Accessed: 2023-02-20.
Lusseau, D. et al. The bottlenose dolphin community of Doubtful Sound features a large proportion of long-lasting associations. Behav. Ecol. Sociobiol. 54, 396–405 (2003).
Acknowledgements
Na.M. and K.A. acknowledge support from the Japan Science and Technology Agency (JST) Moonshot R&D (under grant no. JPMJMS2021). Na.M. acknowledges support from the National Science Foundation (under grant no. 2204936) and JSPS KAKENHI (under grant nos. JP 21H04595 and 23H03414). K.A. acknowledges support from Japan Agency for Medical Research and Development (AMED) (under grant no. JP23dm0307009), JSPS KAKENHI (under grant no. JP20H05921), and Institute of AI and Beyond at the University of Tokyo.
Author information
Authors and Affiliations
Contributions
Na.M. conceived the research, developed the theory, performed the numerical simulations with two- and three-node networks, and drafted the manuscript. Ne.G.M. performed all the other numerical simulations. Na.M., K.A., and Ne.G.M. discussed the results, and revised and checked the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Partha Dutta, and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Masuda, N., Aihara, K. & MacLaren, N.G. Anticipating regime shifts by mixing early warning signals from different nodes. Nat Commun 15, 1086 (2024). https://doi.org/10.1038/s41467-024-45476-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-024-45476-9
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
