
Abstract
Collective motion of self-propelled agents has attracted much attention in vast disciplines. However, almost all investigations focus on such agents evolving in the Euclidean space, with rare concern of swarms on non-Euclidean manifolds. Here we present a novel and fundamental framework for agents evolving on a sphere manifold, with which a variety of concrete cooperative-rules of agents can be designed separately and integrated easily into the framework, which may perhaps pave a way for considering general spherical collective motion (SCM) of a swarm. As an example, one concrete cooperative-rule, i.e., the spherical direction-alignment (SDA), is provided, which corresponds to the usual and popular direction-alignment rule in the Euclidean space. The SCM of the agents with the SDA has many unique statistical properties and phase-transitions that are unexpected in the counterpart models evolving in the Euclidean space, which unveils that the topology of the sphere has an important impact on swarming emergence.
Similar content being viewed by others
Introduction
Collective motion (CM) of self-propelled agents is an important and fascinating emergent phenomenon in nature and artificial world and has attracted increasing interests in the past two decades in many disciplines, e.g., physics, mathematics, biology and robotics1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48. However, almost all work considers CM of agents evolving in either the one-dimensional19, two-dimensional (most references), or three-dimensional8,14,27,28 (for abbreviation, 1D, 2D, 3D, respectively) Euclidean space, in either a discrete8,14,21,22,23,24,25,26,27,28,34,35,36,48, or continuous9,15,37,38,39,40,44,45 or continuum46,47 formulation. Here the meaning of the discrete, continuous and continuum formulations is that, the kinematics/dynamics of agents is described by discrete difference equations (DDEs), ordinary differential equations (ODEs) and partially differential equations (PDEs), respectively, typically in the Euclidean space. Some work also considers agents evolving in a discrete topological space (e.g., agents move on the vertices of a lattice16), which is a non-continuum space. There is rare concern on swarming agents that evolve on a non-Euclidean manifold29, especially from the perspective of statistical physics. For convenience, refer CM in the Euclidean space as ECM.
CM of agents on a sphere (an important non-Euclidean manifold), which itself is an interesting topic, has important implications in analyzing many types of self-propelled agents or continuum-flows (e.g., possibly by a coarse-grained approximation45) evolving on a sphere. For example, fluid patterns and evolution predictions of the atmosphere on the Saturn planet, the current evolution and patterns on the surface of a soap bauble or a water ball in the outer space (which is a water sphere without the effect of the gravity) and even CM of unmanned aircraft near the surface of a planet.
Compared with the ECM, formulation and characterization of the spherical collective motion (SCM) are much different and complex, since the physical topologies of the sphere and the Euclidean space are distinct. The configuration-state (i.e., position and moving direction) space of an agent on a sphere is the tangent bundle of the sphere. Furthermore, formulation of cooperation will further induce much complexity.
The main contributions of this paper are in the following two aspects.
-
1
In this paper, we are first interested in modeling a simplest possible yet effective framework for the SCM of multiple agents driven by a generic cooperative-rule (GCR), in which a set of the framework-rules describes spherical motion of each agent evolving on its own great-circle at each step, with a structure for integration of the GCR into the framework. As a result, the framework is versatile in the sense that: any instance of the GCR (or called a concrete cooperative-rule) can be then designed separately and integrated easily within the framework. Moreover, design of a concrete cooperative-rule for the SCM is rather similar (to a certain degree) as for the case of agents in the Euclidean space, which will add further convenience. New notions, phenomena and characterizations of the SCM are then provided that are distinct from the cases of the ECM.
-
2
As an important example of the GCR, the spherical direction-alignment (SDA) is then provided, which corresponds to the Euclidean direction-alignment (EDA)22 (that was first presented by Vicsek etc. and has been widely adopted in the past decades in many disciplines) of agents that is fundamental for the ECM. The SCM with the SDA has many unique characteristics that are unexpectedly distinct from the counterpart ECM model with the EDA, which unveil that the topology of the sphere has an important impact on swarming emergence.
Framework
Definitions and Notations
Without loss of generality, assume the sphere is located at the origin of the 3D Euclidean space with radius r > 0. Define  as the position of agent i, i = 1, 2, …, n, on the sphere at step k in the Cartesian coordinates,
as the position of agent i, i = 1, 2, …, n, on the sphere at step k in the Cartesian coordinates,  for all i, k, k = 0, 1, 2, …, where
for all i, k, k = 0, 1, 2, …, where  is the Euclidean norm,
is the Euclidean norm,

and  are the X-Y-Z coordinates of position pi(k) in the Cartesian coordinates, respectively. Notice that notation pi(k) also represents the position vector that starting from the center of the sphere to the position of agent i, according to the context. Denote Ti(k) as the tangent plane to the sphere at position pi(k).
are the X-Y-Z coordinates of position pi(k) in the Cartesian coordinates, respectively. Notice that notation pi(k) also represents the position vector that starting from the center of the sphere to the position of agent i, according to the context. Denote Ti(k) as the tangent plane to the sphere at position pi(k).
We use the notion “direction” to express the heading-orientation of an agent in the 3D Euclidean space, which corresponds to the heading angle that is valid in the 2D Euclidean space and the 3D direction is a necessity to avoid possible symmetry-breaking control laws28. The direction of agent i at step k, denoted as  , implies that:
, implies that:
-
1
it is a vector with a unitary magnitude:
 ; and
; and -
2
it is constrained on the tangent plane Ti(k), i.e., it is perpendicular to the position of this agent: di(k) ┴ pi(k).
 ; and
; andThe adaptive velocity of agent i has two meanings:
-
1
an adaptive direction according to a certain rule; and
-
2
an adaptive speed (here speed means the magnitude of velocity) vi(k), typically measured by the step-size at each step in a discrete formulation.
For spherical motion of an agent, there are two required configuration constraints: the position-constraint  and the direction-constraint di(k) ┴ pi(k).
and the direction-constraint di(k) ┴ pi(k).
Framework
The framework, as one of the main focuses in this paper, is described as the iterative equations as follows.
First, for clarity and conciseness, define the vectorial function  as:
as:

where the notation  means the inner product in the 3D Euclidean space, which has the physical meaning that: it calculates the component of vector u that is perpendicular to vector v and then makes this component normalized via the division of the magnitude
means the inner product in the 3D Euclidean space, which has the physical meaning that: it calculates the component of vector u that is perpendicular to vector v and then makes this component normalized via the division of the magnitude  of the component, provided that u, v are not parallel (i.e.,
of the component, provided that u, v are not parallel (i.e.,  ).
).
Consider the framework-rules of the SCM of agents in a discrete formulation, the initial positions pi(0), directions di(0) and speeds vi(0) of all agents are given for the start of the iteration. Without loss of generality, assume vi(0) = 0 for all i and the time interval Δt is a unit, i.e., Δt = 1. The next position pi(k + 1), direction di(k + 1) and speed vi(k + 1) of every agent i at step k + 1 that starting from position pi(k) with direction di(k) and speed vi(k), are described by



 where in (3) notation
where in (3) notation  is called the mapped-Euclidean-step-size that is defined as
is called the mapped-Euclidean-step-size that is defined as

which ensures the spherical-step-size of agent i to be the speed vi(k), i.e., the great-circle-distance (GCD) between two steps pi(k) and pi(k + 1) is just vi(k)Δt = vi(k); v0 is a constant (v0 ≪ r) that represents the maximum-possible speed of all agents; the exponent α ≥ 0 characterizes the adaptivity of speed of agents.
Generic Cooperative-Rule and Notion of Spherical Approaching-Direction
In the framework,  represents the GCR of agent i at step k + 1:
represents the GCR of agent i at step k + 1:

where  is a generic function to be designed for a certain expectation of the SCM, which may probably use the notion spherical approaching-direction
is a generic function to be designed for a certain expectation of the SCM, which may probably use the notion spherical approaching-direction  :
:

it is the very direction of agent j when this agent just reaches at next position pj(k + 1), while before it switches to its new direction dj (k + 1) at that position (the superscript “−” in  means “the left limit” at that position, hence the word “approaching” is used in this notion), the invariant quantity is
means “the left limit” at that position, hence the word “approaching” is used in this notion), the invariant quantity is

where notation × means the cross product of two vectors. As a comparison, the notion “approaching-direction” is not needed in the Euclidean space, since any agent moves in a straight line to its next position without direction change during the traveling of any adjacent steps, thus  just reduces to be the starting direction dj(k) at position pj(k) in the Euclidean space.
just reduces to be the starting direction dj(k) at position pj(k) in the Euclidean space.
In design of ζi(k + 1), generally  is required; and ζi(k + 1) ┴ pi(k + 1) is preferred, but not necessarily required, owning to the perpendicular ramification by rule (4) using the function f.
is required; and ζi(k + 1) ┴ pi(k + 1) is preferred, but not necessarily required, owning to the perpendicular ramification by rule (4) using the function f.
In the SCM framework and the GCR, note that  are the 3D vectorial variables; f, fg are two vectorial functions;
are the 3D vectorial variables; f, fg are two vectorial functions;  are the scalar variables; while r, α, v0 > 0 are the scalar constants.
are the scalar variables; while r, α, v0 > 0 are the scalar constants.
Interpretations
First, every agent i in the swarm with rules (3)(4) and (6) is constraint to move on the sphere along the moving direction di(k) [that starts at position pi(k) at step k with the speed (or the spherical-step-size) vi(k)] from position pi(k) to position pi(k + 1); and then it will move along the moving direction di(k + 1) [that starts at position pi(k + 1) at step k + 1 with the speed vi(k + 1)] to the next position and so on. The formulation is robust in the sense that, any uncertain or noise in the system (although which may possibly influence the behaviors of the SCM of the agents) will not drive the agents away from the sphere.
The direction di(k + 1) of agent i is determined by the cooperative-rule ζi(k + 1) and then calculated with the unitary and perpendicular ramification by rule (4).
The physical meaning of ζi(k + 1) can be viewed as a certain form of the local polarization surrounding agent i (according to a concrete form of function fg) when all agents are just approaching to their next positions at step k + 1 (refer to the notion spherical approaching-direction). The vectorial information of ζi(k + 1) is used to determine direction di(k + 1) of agent i according to rule (4), its magnitude  determines vi(k + 1) by rule (5). The physical meaning of exponent α > 0 implies that, when ζi(k + 1) shows a strong polarization, i.e.,
determines vi(k + 1) by rule (5). The physical meaning of exponent α > 0 implies that, when ζi(k + 1) shows a strong polarization, i.e.,  , agent i naturally moves faster; while ζi(k + 1) shows no or a weak polarization, i.e.,
, agent i naturally moves faster; while ζi(k + 1) shows no or a weak polarization, i.e.,  , agent i naturally hesitates and is confused to move at such singularity situation, thus vi(k + 1) ≈ 0; this phenomenon is called the adaptive velocity mechanism (AVM)27,28.
, agent i naturally hesitates and is confused to move at such singularity situation, thus vi(k + 1) ≈ 0; this phenomenon is called the adaptive velocity mechanism (AVM)27,28.
It is easy to express a constant-speed-motion of agents, which is the usual assumption in literature (the advantage of the AVM vs the constant-speed-motion is illustrated in27). That is, let

for all i, k that replacing the rule (5), thus the equations (3) (4) describe the agents with constant speed v0 on the sphere, with the rule (6) for different i, k reduces to be a constant:

The framework is versatile in that, a variety of concrete cooperative-rules of ζi(k + 1) can be designed separately and integrated easily into the framework.
Finally, a sphere manifold is a closed set, thus the periodic boundary condition (e.g., in22 and many other papers) for agents in the Euclidean space is not needed when considering SCM. Certainly, one may apply the periodic boundary condition or other boundary conditions to a designated region of interest on the sphere and investigate the agents evolving on that region instead of the whole sphere, this is out of the scope of this paper.
Formulation of the SDA
As an important example of the GCR, consider

where
-
 is the neighbour set of agent i at step k + 1 and
is the neighbour set of agent i at step k + 1 and  if the GCD between agents i, j is less than threshold r0, where
if the GCD between agents i, j is less than threshold r0, where  ,
, -
ni(k + 1) is the number of agents (including agent i) in the neighboring set
 , thus ni(k + 1) ≥ 1.
, thus ni(k + 1) ≥ 1.
 is the neighbour set of agent i at step k + 1 and
is the neighbour set of agent i at step k + 1 and  if the GCD between agents i, j is less than threshold r0, where
if the GCD between agents i, j is less than threshold r0, where  ,
, , thus ni(k + 1) ≥ 1.
, thus ni(k + 1) ≥ 1.Note that the rule (12) calculates the average of the spherical approaching-directions (8) of agents in  .
.  , so
, so  .
.
For convenience, the rule (12), together with the unitary and perpendicular ramification (4), is called the SDA (the noise will be discussed in the following). Its physical meaning is that: every agent adopts the very direction at each step, which is derived by averaging the spherical approaching-directions of its neighboring agents at that step, then with the unitary and perpendicular ramification.
Note that the SDA rule (12) is equal to the expression:

using the function f.
As a comparison, recall the fundamental EDA in the Euclidean space, with its physical meaning as that: every agent adopts the average direction of its neighboring agents at each step (that was first presented by Vicsek etc. in22 and widely adopted in the past decades in many disciplines).
SDA With Noise
Noise is a common factor in CM of agents. Expression of noise in the SDA is also complex, compared with the EDA in the Euclidean space.
Consider the noise in the spherical approaching-directions in calculating the SDA in (12), i.e., a random swing of  with an angle
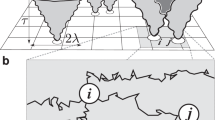
with an angle  on the tangent plane Tj(k + 1) for each agent j and step k (refer to Fig. 1), where ϑ represents a white noise with the strength randomly distributed in the interval [−η, η], η ≥ 0 is a constant that models the strength of the noise, note that the unit of η is in radians in this paper. Denote
on the tangent plane Tj(k + 1) for each agent j and step k (refer to Fig. 1), where ϑ represents a white noise with the strength randomly distributed in the interval [−η, η], η ≥ 0 is a constant that models the strength of the noise, note that the unit of η is in radians in this paper. Denote  as the noised spherical approaching-direction of
as the noised spherical approaching-direction of  , note that
, note that  , then the SDA rule (12) becomes
, then the SDA rule (12) becomes

Illustration of directions  and
and  on the tangent plane Tj(k + 1).
on the tangent plane Tj(k + 1).
The two directions  ,
,  have the noised angle ϑ.
have the noised angle ϑ.

Calculation of Noise in the SDA
To calculate the noise in the SDA, first, select a value of ϑ randomly and uniformly from the interval [−η, η] for each agent j and step k, then

where

and

are one pair of the orthogonal X-axis and Y-axis on the tangent plane Tj(k + 1) at position pj(k + 1). Note that  . Also note that
. Also note that 
 ,
,  ,
,  and
and  . As a result,
. As a result,  and
and  .
.
Reduction from local sphere to 2D Euclidean space
The topologies of the sphere and the Euclidean space are completely different but have some relations. Consider a very limited local region of the sphere, which seems “flat” and thus approximates to the 2D Euclidean space, then for the agents on a local sphere, some mathematical expressions are similar to the counterparts in the 2D Euclidean space.
As an extreme case, when the radius of the sphere is infinite, the agents evolving on a very local sphere is similar as in the 2D Euclidean space, in this case the vectors in the SCM model reduce to be the corresponding vectors in 2D Euclidean space, then the tangent plane Tj(k + 1) is always the 2D Euclidean plane and  ,
,

and  in which (14) becomes
in which (14) becomes

Equation (3) becomes

Equation (5) remains. As a result, the model reduces to be the ECM model with the AVM (α > 0) in the 2D Euclidean space27,28.
Its further reduction with α = 0 is similar to the famous Vicsek-model (VM)22, upon which many variations have been developed. Note that only for the 2D Euclidean case, the direction  of agent i can be expressed as di(k) = [cos θi(k), sin θi(k)]T using a parametrized angle, as in many literature, where
of agent i can be expressed as di(k) = [cos θi(k), sin θi(k)]T using a parametrized angle, as in many literature, where  is a scalar angle of agent i at step k.
is a scalar angle of agent i at step k.
Characterization
There are some characteristics for the SCM that are different from the case for the ECM. For example, the notion of the spherical approaching-direction [refer to Eq. (8)], the new order-parameters, the mean angular-momenta, the manifold-centroid of agents, the principal plane, the principal great-circle and the scale of spherical distribution of agents, etc. The details are illustrated in the following.
The usual order-parameter for the ECM is defined as

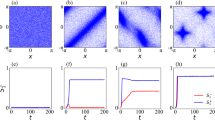
as in most literature, which, however, is less effective (or even improper) for the SCM, especially when the agents are distributed on a large scale of the sphere that is comparable with its radius. For example, this improper aspect can be seen from one instance of the swarming evolution (refer to Fig. 2, with the trajectories of the agents and characteristics illustrated in Figs 3 and 4, respectively), in which the snapshots (Fig. 2) already show the very order of the agents, while the usual order-parameter ϕ(k) (refer to Fig. 4) is still very low.


Illustration of the trajectories of three agents among all agents, p(k) and ω(k), respectively.
The parameters and the initial condition are same as in Fig. 2.

Illustration of some characterization variables.
The parameters and the initial condition are same as in Fig. 2. Notation δ represents the standard-deviation of the variables ci(k) or ei(k), i = 1, 2,…, n, in the corresponding legend, which is the square-root of an unbiased estimator of the variance.
One suggested order-parameter for the SCM is the norm of the mean angular-momenta of agents, i.e.,

where

is the mean angular-momenta of agents about the center of the sphere. Certainly, there is no conservation of angular-momentum in self-propelled agents. As an extreme case, ϕm(k) = 1 when all the agents move steady on the same great-circle of the sphere.
Another suggested order-parameter is the average of the local-order-parameters of  for all the agents:
for all the agents:

which is effective for the swarm with cohesive motion while less meaningful if the swarm breaks into numerical fragments. Note that

thus

i.e., ϕζ(k) is just measured by the average adaptive speed of all agents at each step, divided by the maximum speed v0. The strength of noise in the swarm influences the value of ϕζ(k), but not the equation (26) of ϕζ(k).
Define the manifold-centroid of agents as:

where

is the average Euclidean position of agents. The swarm has generally no aggregation on a local sphere when  .
.
Denote

as the rotation-axis, denote the principal plane  as the plane that is perpendicular to ω(k) and passes through the center of the sphere, denote the principal great-circle as the great-circle of the sphere on
as the plane that is perpendicular to ω(k) and passes through the center of the sphere, denote the principal great-circle as the great-circle of the sphere on  .
.
For the scale of spherical distribution of agents, one measure is the mean GCD of agents to p(k), i.e.,

where

is the GCD between pi(k) and p(k); another is the mean Euclidean-distance of all agents to plane  , i.e.,
, i.e.,

where

is the Euclidean-distance of agent i to plane  . Note that e(k) < r and e(k) → 0 means that the agents converge to the principal great-circle of the sphere and rotate about ω(k).
. Note that e(k) < r and e(k) → 0 means that the agents converge to the principal great-circle of the sphere and rotate about ω(k).
Denote  as the ratio of the number of the agents in the vicinity of agent i. Denote
as the ratio of the number of the agents in the vicinity of agent i. Denote  .
.
Evolution of SCM with SDA
It is just as expected that, when the distribution-density of the agents is large enough and the noise is weak, the agents will exhibit ordered motion as a whole; otherwise, the agents will break into some ordered fragments at the very beginning of the evolution.
Interestingly, for the evolution of the SCM with the SDA, there are some phenomenons and properties that are distinct from the cases of the ECM.
For example, the fragments will have more opportunity later to collide and merge into a whole swarm, due to the topology of the sphere.
Also, the SCM with the SDA has a distinct shrinking effect, which will make the scale of the swarming agents continuously shrinking during the evolution, even with a large noise (refer to the next section), i.e., the swarm on the sphere has ordered motion with a stronger tolerance of noise.
Figure 2 illustrate one instance of the swarming evolution. During the evolution, the scale of the swarming agents converges, as shown in c(k) and e(k), with increasing ϕm(k) and ϕζ(k) in Fig. 4, which are appropriate order-parameters for the SCM in this case; however, the emergence cannot be effectively reflected by the usual order-parameter ϕ(k) that is valid for the ECM [note that ϕ(k) → 1 only when the agents converge to a very limited local scale on the sphere with ordered motion]. When r0 is small, the agents will converge approximately to move on the sphere with the trajectories that are approximately parallel to the principal great-circle. As r0 is large, oscillator trajectories of some agents may appear [e.g., refer to curves of e1(k), e2(k) in Fig. 4, the definition of ei(k) is provided in Eq. (33)], except the agents that are very near to plane  .
.
Generally the agents will never evolve to a consensus velocity (or direction) even without noise (except the trivial case that all the agents always occupy same position at each step), due to the topology of the sphere, this is different from the case of the Euclidean space.
Statistical Properties
For the statistical properties, consider the SCM at a certain terminal step k. Note that the order parameters evolve faster (Fig. 4) and then remain relatively stable, while the scale of the swarm shrinks continuously and slowly. In this paper, k = 600 (if without special mention) is set instead of a still larger value, since the properties are relatively stable and the SCM is a computationally incentive simulation.
The state of a swarm at step k provides that slice of the evolution. For clarity, denote the values of ϕm(k), ϕζ(k), ϕ(k), e(k), etc., at the terminal step, as ϕm, ϕζ, ϕ, e, respectively. Each of the order-parameters ϕm(k), ϕζ(k), ϕ(k) reflects one aspect of emergence; in many cases, all these order-parameters are required (one serves as a compensation to another) to characterize the emergence.
Figures 5 and 6 illustrates some statistical properties of the SCM as a function of noise η and r0. For the curves of ϕm with different noise, the values of ϕm first increase as r0 increases and reach the peaks as r0 is around rp ≈ 0.4 and then decrease after that. From the simulation results, the transition at the peaks implies the transition of motion patterns that from the pattern of ordered fragments for r0 < rp to the pattern of cohesion (i.e., without fragments) for r0 > rp. The increase of ϕm is expected as r0 increases for r0 < rp. While for r0 > rp, the agents move as a whole without fragments; in this case, as r0 increases, the scale e of the swarm increases, thus ϕm decreases (due to the topology of the sphere). ϕ has a similar but delayed transition. The scale e first decreases and then increases. In Figs 5 and 6, ϕζ monotonically decreases as r0 increases; note that ζi measures the local order of agent i, thus for a small enough r0, no matter how many fragments, ϕζ always has a large value; in other words, ϕζ is valid and effective when the agents have no (or less) fragments (r0 > rp), in this case, as r0 increases, the scale e increases, the local order ζi decreases (due to the topology of the sphere), thus ϕζ decreases.

Illustration of the statistical properties as a function of noise η ∈ [0, 1.2](rad) and r0 ∈ [0.1, 1.2] × r.
The x-axis is r0. r = 1. n = 600. v0 = 0.02. The agents initially distribute on the whole sphere with uniformly random configurations. Each date is averaged by 40 runs. α = 0. k = 600.

Illustration of the statistical properties as a function of noise η ∈ [0, 1.2](rad) and r0 ∈ [0.1, 1.2] × r.
The x-axis is r0. r = 1. n = 600. v0 = 0.02. The agents initially distribute on the whole sphere with uniformly random configurations. Each date is averaged by 40 runs. α = 2. k = 600.
The exponent α = 0 makes the values of ϕm, ϕ and e (after the transitions) less influenced by the noise than the case of α > 0.
The effects of r0 and v0 are completely opposite, with respect to the influence on the scale of the swarm. For a larger enough r0, the increase of r0 tends to increase the scale of the swarm (Figs 5 and 6). While as v0 increases, the shrinking effect (since all the agents move on the respective great-circles at each step and no two great-circles are parallel, which tends to make the trajectories of the agents continuously converge, due to the topology of the sphere) of the swarm is strengthened, thus the scale e decreases and the order parameters increase (Figs 7 and 8). As v0 is larger enough (e.g., Figs 7 and 8 as v0 = 0.08) that overweights the effect of r0, the scale e decreases monotonically and ϕm increases monotonically.

Illustration of the statistical properties of the SCM.
r = 1. n = 600. α = 0. The agents initially distribute on the whole sphere with uniformly random configurations. Each date is averaged by 40 runs. η = 0. k = 600.

Illustration of the statistical properties of the SCM.
r = 1. n = 600. α = 0. The agents initially distribute on the whole sphere with uniformly random configurations. Each date is averaged by 40 runs. η = 0.04. k = 600.
The order parameters and the scale of the swarm are less influenced by the number n of agents (i.e., the different density of the swarming agents) in the swarm as illustrated in Figs 9 and 10.

Illustration of the statistical properties of the SCM.
r = 1. α = 0. v0 = 0.02. The agents initially distribute on the whole sphere with uniformly random configurations. Each date is averaged by 40 runs. η = 0. k = 600.

Illustration of the statistical properties of the SCM.
r = 1. α = 0. v0 = 0.02. The agents initially distribute on the whole sphere with uniformly random configurations. Each date is averaged by 40 runs. η = 0.04. k = 600.
As the noise increases, the suggested order parameters ϕm(k) and ϕζ(k) for the SCM decrease and e increases, as expected. However, the usual order parameter ϕ(k) has a larger value for a larger noise for r0 < rp in Figs 5 and 6, this is another perspective to show that the usual order parameter ϕ(k) is not a good order parameter for the SCM (also refer to the example in the second paragraph of Section V).
Conclusion
This paper provides a fundamental yet simplest possible and effective framework for the SCM of agents driven by a GCR, which is versatile in the sense that, a variety of concrete cooperative rules of agents can be designed separately and integrated easily into the framework. This paper also designs the SDA and investigates the unique phenomenons and properties that are specific to the SCM, which unveils an impact of the topology of the sphere on swarming emergence. There are some directions for future investigation. For example, i) the SCM with the SDA has very rich dynamics, with more characteristics that need to be further investigated; ii) other concrete cooperative rules of agents for different motion patterns on a sphere will be considered in a future paper; and iii) the framework has important implications in analyzing the SCM of many types of self-propelled agents on a sphere and even continuum-flows (e.g., by a coarse-grained approximation) for further investigation.
Additional Information
How to cite this article: Li, W. Collective Motion of Swarming Agents Evolving on a Sphere Manifold: A Fundamental Framework and Characterization. Sci. Rep. 5, 13603; doi: 10.1038/srep13603 (2015).
Change history
28 October 2015
A correction has been published and is appended to both the HTML and PDF versions of this paper. The error has not been fixed in the paper.
References
Parrish, J. K. & Edelstein-Keshet, L. Complexity, pattern and evolutionary trade-offs in animal aggregation. Science 284, 99–101 (1999).
Krause, J. & Ruxton, G. D. Living in Groups (Oxford Univ. Press, Oxford, 2002).
Sumpter, D. J. Collective animal behavior (Princeton University Press, Princeton, 2010).
Conradt, L. & Roper, T. J. Group decision-making in animals. Nature 421, 155–158 (2003).
Krause, J., Ruxton, G. D. & Krause, S. Swarm intelligence in animals and humans. Trends Cogn. Sci. 25, 28–34 (2009).
Couzin, I. D. Collective cognition in animal groups. Trends Cogn. Sci. 13, 36–43 (2009).
Rands, S. A., Cowlishaw, G., Pettifor, R. A., Rowcliffe, J. M. & Johnstone, R. A. Spontaneous emergence of leaders and followers in foraging pairs. Nature 423, 423–434 (2003).
Couzin, I. D., Krause, J., Franks, N. R. & Levin, S. A. Effective leadership and decision-making in animal groups on the move. Nature 433, 513–516 (2005).
Lukeman, R., Li, Y. X. & Edelstein-Keshet, L. Inferring individual rules from collective behavior. Proc. Natl. Acad. Sci. 107, 12576–12580 (2010).
Katz, Y., Tunstrom, K., Ioannou, C. C., Huepe, C. & Couzin, I. D. Inferring the structure and dynamics of interactions in schooling fish. Proc. Natl Acad. Sci. 108, 18720–18725 (2011).
Nowak, M., Sasaki, A., Taylor, C. & Fudenberg, D. Emergence of cooperation and evolutionary stability in finite populations. Nature 428, 646–650 (2004).
Moon, S. J., Nabet, B., Leonard, N. E., Levin, S. A. & Kevrekidis, I. G. Heterogeneous animal group models and their group-level alignment dynamics: an equation-free approach. J. Theor. Biol. 246, 100–112 (2007).
Couzin, I. D. et al. Uninformed individuals promote democratic consensus in animal groups. Science 334, 1578–1580 (2011).
Couzin, I. D., Krause, J., James, R., Ruxton, G. D. & Franks, N. R. Collective memory and spatial sorting in animal groups. J. Theor. Biol. 218, 1–11 (2002).
Nabet, B., Leonard, N. E., Couzin, I. D. & Levin, S. A. Dynamics of decision making in animal group motion. J. Nonlinear Sci. 19, 399–435 (2009).
Kamimura, A. & Ohira, T. Group chase and escape. New J. Phys. 12, 053013 (2010).
Ward, A. J. W., Herbert-Read, J. E., Sumpter, D. J. T. & Krause, J. Fast and accurate decisions through collective vigilance in fish shoals. Proc. Natl. Acad. Sci. 108, 2312–2315 (2011).
Conradt L. & Roper, T. J. Consensus decision-making in animals. Trends Ecol. Evol. 20, 449–456 (2005).
Czirok, A., Barabasi, A.-L. & Vicsek, T. Collective motion of self-propelled particles: kinetic phase transition in one dimension. Phys. Rev. Lett. 82, 209–212 (1999).
Vicsek, T. & Zafeiris, A. Collective motion. Phys. Rep. 517, 71–140 (2012).
Yates, C. A. et al. United by noise: randomness helps swarms stay together. Proc. Natl. Acad. Sci. 106, 5464–5469 (2009).
Vicsek, T., Czirok, A., Ben-Jacob, E., Cohen, I. & Shochet, O. Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 75, 1226–1229 (1995).
Toner, J. & Tu, Y. Long-range order in a two-dimensional dynamical XY model: how birds fly together. Phys. Rev. Lett. 75, 4326–4329 (1995).
Deutsch, A., Theraulaz, G. & Vicsek, T. Collective motion in biological systems. Interface Focus 2, 689–692 (2012).
Gregoire, G. & Chate, H. Onset of collective and cohesive motion. Phys. Rev. Lett. 92, 025702 (2004).
Erdmann, U., Ebeling, W. & Mikhailov, A. S. Noise-induced transition from translational to rotational motion of swarms. Phys. Rev. E 71, 051904 (2005).
Li, W. & Wang, X. Adaptive velocity strategy for swarm aggregation. Phys. Rev. E 75, 021917 (2007).
Li, W. et al. Singularities and symmetry breaking in swarms. Phys. Rev. E 77, 021920 (2008).
Li, W. & Spong, M. W. Unified Cooperative Control of Multiple Agents on a Sphere for Different Spherical Patterns. IEEE Trans. Autom. Control 59, 1283–1289 (2014).
Dossetti, V., Sevilla, F. J. & Kenkre, V. M. Phase transitions induced by complex nonlinear noise in a system of self-propelled agents. Phys. Rev. E 79, 051115 (2009).
Vanni, F., Lukovic, M. & Grigolini, P. Criticality and Transmission of Information in a Swarm of Cooperative Units. Phys. Rev. Lett. 107, 078103 (2011).
Hackett-Jones, E. J., Landman, K. A. & Fellner, K. Aggregation patterns from nonlocal interactions: Discrete stochastic and continuum modeling. Phys. Rev. E 85, 041912 (2012).
Menzel, A. M. Collective motion of binary self-propelled particle mixtures. Phys. Rev. E 85, 021912 (2012).
Baglietto, G., Albano, E. V. & Candia, J. Criticality and the onset of ordering in the standard Vicsek model. Interface Focus 2, 708–714 (2012).
Romanczuk, P. & Schimansky-Geier, L. Brownian Motion with Active Fluctuations. Phys. Rev. Lett. 106, 230601 (2011).
Farrell, F. D. C., Marchetti, M. C., Marenduzzo, D. & Tailleur, J. Pattern Formation in Self-Propelled Particles with Density-Dependent Motility. Phys. Rev. Lett. 108, 248101 (2012).
Chepizhko, O., Altmann, E. G. & Peruani, F. Optimal Noise Maximizes Collective Motion in Heterogeneous Media. Phys. Rev. Lett. 110, 238101 (2013).
Kummel, F. et al. Circular Motion of Asymmetric Self-Propelling Particles. Phys. Rev. Lett. 110, 198302 (2013).
Ferrante, E., Turgut, A. E., Dorigo, M. & Huepe, C. Elasticity-Based Mechanism for the Collective Motion of Self-Propelled Particles with Springlike Interactions: A Model System for Natural and Artificial Swarms. Phys. Rev. Lett. 111, 268302 (2013).
Ferrante, E., Turgut, A. E., Dorigo, M. & Huepe, C. Collective motion dynamics of active solids and active crystals. New J. Phys. 15, 095011 (2013).
Romanczuk, P., Couzin, I. D. & Schimansky-Geier, L. Collective motion due to individual escape and pursuit response. Phys. Rev. Lett. 102, 010602 (2009).
Yates, C. A. et al. Inherent noise can facilitate coherence in collective swarm motion. Proc. Natl. Acad. Sci. 106, 5464–5469 (2009).
Krieger, M. J. B., Billeter, J.-B. & Keller, L. Ant-like task allocation and recruitment in cooperative robots. Nature 406, 992–995 (2000).
Romanczuk, P. & Schimansky-Geier, L. Swarming and pattern formation due to selective attraction and repulsion. Interface Focus 2, 746–756 (2012).
Raghiba, M., Levin, S. A. & Kevrekidis, I. G. Multiscale analysis of collective motion and decision-making in swarms: An advection diffusion equation with memory approach. J. Theor. Biol. 264, 893–913 (2010).
Mogilner, A. & Edelstein-Keshet, L. A non-local model for a swarm. J. Math. Biol. 38, 534–570 (1999).
Topaz, C. M., Bertozzi, A. L. & Lewis, M. A. A nonlocal continuum model for biological aggregation. Bull. Math. Biol. 68, 1601–1623 (2006).
Angelani, L. Collective Predation and Escape Strategies. Phys. Rev. Lett. 109, 118104 (2012).
Author information
Authors and Affiliations
Ethics declarations
Competing interests
The author declares no competing financial interests.
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Li, W. Collective Motion of Swarming Agents Evolving on a Sphere Manifold: A Fundamental Framework and Characterization. Sci Rep 5, 13603 (2015). https://doi.org/10.1038/srep13603
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep13603
This article is cited by
-
Activity-induced polar patterns of filaments gliding on a sphere
Nature Communications (2022)
-
An Intrinsic Aggregation Model on the Special Orthogonal Group SO(3): Well-posedness and Collective Behaviours
Journal of Nonlinear Science (2021)
-
Crystallization of self-propelled particles on a spherical substrate
Applied Mathematics and Mechanics (2019)
-
Aging and rejuvenation of active matter under topological constraints
Scientific Reports (2017)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
