
Abstract
In order to examine whether stereoscopic depth information could drive fast automatic correction of hand pointing, an experiment was designed in a 3D visual environment in which participants were asked to point to a target at different stereoscopic depths as quickly and accurately as possible within a limited time window (≤300 ms). The experiment consisted of two tasks: “depthGO” in which participants were asked to point to the new target position if the target jumped and “depthSTOP” in which participants were instructed to abort their ongoing movements after the target jumped. The depth jump was designed to occur in 20% of the trials in both tasks. Results showed that fast automatic correction of hand movements could be driven by stereoscopic depth to occur in as early as 190 ms.
Similar content being viewed by others


Introduction
With automatic correction mechanism, humans can quickly and involuntarily correct ongoing hand movements in response to fast and unpredictable changes of a target's properties (e.g., location). These automatic motor corrections are suggested to be driven by property change1,2,3,4.
The neural mechanism of automatic correction is suggested to be associated with the dorsal and ventral cortical pathways3,6,10. The ventral stream is thought to be slow and associated with object recognition and form representation5,6, whereas the dorsal stream is fast and involved in spatial location processing and the guidance of actions3,4,7,8,9. Recent research has suggested that automatic correction during hand movements reacting to spatial attributes (e.g., orientation, size and location) and color in 2D vision is mainly mediated by the dorsal stream3,4. The fast corrections of hand grasping movements were observed in response to orientation modifications11,12,13. The hand grip aperture was also shown to make smooth modifications when the target's size changed20,21. Particularly, the automatic adjustments of hand reaching and pointing movements were observed in the studies on lateral jumps3,4,14,15,16,17,18,19. Pisella et al.3 studied the “GO” and “STOP” tasks in response to location jumps and found that the movement time of full corrections could occur within a time range of 200 ms to 240 ms despite task types. Cressman et al.4 and Cameron et al.15 found that hand movement trajectories could begin to differ between the jump and static trials as early as 130–150 ms. Similar results of automatic correction have been found in the work of Brenner et al.16 by using acceleration analysis. The study of automatic correction to color has also been studied3,4,16 in the literature. Although Brenner et al.16 suggested that color vision could contribute to fast arm movement corrections, Pisella et al.3 and Cressman et al.4 found that automatic correction might not be triggered by color jumps3. Therefore, the role of dorsal and ventral pathways in automatic correction is still controversial.
Stereoscopic depth derived from binocular disparity is crucial for perception, recognition and action in vision22,23 and Parker, A. J.27 suggests that both dorsal and ventral pathways are involved in the processing of binocular depth information. There have been recent studies24,25,26 suggesting that participants could quickly respond to cue change induced by binocular disparity. Cameron et al.25 examined the effect of automatic correction on the dual-target pointing tasks in a 2D plane. Participants were asked to sequentially hit two targets in two different depth positions when one of the targets jumped 5 cm to the right in 30% of the trials. Van Mierlo et al.26 also investigated the response to the change of slanted cues in binocular disparity. Participants were told to move a cylinder and then accurately place it on a virtual surface in a 3D virtual environment. It was found that participants could quickly respond to the slanted cue change in 200 ms. However, stereoscopic depth was not directly tested in this experiment because the target jumping in slant contained lateral shifts at the same time. Brenner et al.24 tested fast movement in response to changes in binocular disparity through a cursor manipulation task. Participants were asked to respond quickly to the slant jumps by moving a mouse cursor within a simulated horizontal plane at eye level. In the experiment, the time required to respond to the change in binocular disparity was found to be 200 ms, but stereoscopic depth was not directly tested either because targets with slant jumps also included lateral shifts. Till now, little direct evidence has been reported on whether stereoscopic depth information can drive fast automatic correction of hand actions or not. In this report, an experiment in 3D vision has been designed to test this.
Previous research proposed the GO and STOP tasks to investigate fast corrections of hand movements against or following intentional control3,4,14,15,17. The GO task was used to test the effect of online intentional control of hand movements, whereas the STOP task was employed to investigate the ability of automatic correction to override intentional control. In this study, a repeated-measures experimental design was adopted so that all subjects would participate in each condition. Two tasks of “depthGO” and “depthSTOP”, two trial types of “jump” and “static” and three depths of “d1”, “d2” and “d3” in 3D vision were used in the experiment. Participants were instructed to point as quickly and accurately as possible to a target jumping only in stereoscopic depth within a limited time window (≤300 ms).
Methods
Participants
Thirteen right-handed university students (four female, nine male; mean ± SD age 25.1 ± 4.1 years; pupillary distance 6.5 ± 0.4 cm) with normal or corrected-to-normal visual acuity participated in this study voluntarily.
Ethics Statement
All participants gave informed consent according to the procedures approved by the Ethics Committee of the Medicine and Life Science Faculty at Tongji University and signed the written consent forms. The experiment was conducted according to the approved guidelines.
Apparatus
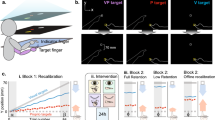
Participants sat in a dimly lit room with their chin resting on a chin-rest. Their eyes were 500 mm away from the monitor screen and aligned both vertically and horizontally with the center of the screen. The stimuli were presented by using a 3D LCD monitor (Zalman 3D, 22 inches, 1680 × 1050 pixels, 75 HZ), which was viewed through a polarized stereoscopic 3D spectacles (passive glasses with no receivers and no batteries). The positions of a participant's index finger wearing a marker (Infrared-emitting Diode) were recorded by the Optotrak Certus motion capture system (Northern Digital, Waterloo, ON, Canada) with a temporal frequency of 200 Hz. The coordinate system of the recorded data was adjusted in a 3D space (The X axis indicated the horizontal direction. The Y axis indicated the upward height-direction from the start position and Z axis was the depth axis), as shown in Figure 1A. The distance from the screen to an observer's eye was 500 mm and the distance from the screen to the start position (SP) of the index finger was 370 mm (i.e., the SP was 130 mm in front of the observer's eyes).

Schematic illustration of experiment: (A) set-up, (B) hand pointing of trial events and (C) targets in 3D vision.
The X axis indicated the horizontal direction, the Y axis indicated the upward height-direction from the start position and the Z axis was the depth axis. This figure was drawn by Yalin Song.
Stimuli
Virtual circular planes of the same size at three different depths were used as the stimuli in the experiment and these planes consisted of random green dots with a density of 13%. The background was set to black filled with white random points (single pixel) with a density of 3% to provide a clear three-dimensional effect. Here, dynamic random dot stereograms (DRDSs) were not used to disguise motion transients, so the lateral shifts could possibly be introduced in monocular vision for creating the stereoscopic depth jumps. However, such lateral shifts could not be perceived on the targets in binocular vision and the target jumps to which participants pointed only shifted in depth. The perceived positions of targets were located at the distances of 320 mm, 360 mm and 400 mm from the viewers (labeled as d1, d2 and d3 respectively, as shown in Figure 1A). In order to remove the influence induced by variation in plane size, the diameters of all of the perceived circular planes and the center distances on the display were calculated using the perceived plane size (50 mm), the perceived plane distance (i.e., 320 mm, 360 mm and 400 mm) and pupillary distance (as shown in Figure 1C) so that all of the discs were perceptually equivalent to 50 mm.
Procedure and design
The paradigm adopted in this experiment was similar to that used in other studies3,4,14,15,25 and participants were asked to reach and point to the target as quickly and accurately as possible. Two tasks of “depthGO” and “depthSTOP” were used in the experiment. In the “depthGO” task, participants were asked to point to the perceived position and correct their index fingers to point to the new target position if the target jumped (Figure 1B). In the “depthSTOP” task, participants were instructed to abort their ongoing hand movements and withdraw their hands immediately if the target jumped. Given that it is relatively difficult to quickly and precisely point to a target in a 3D visual environment and to hold the arm still, participants were instructed in the two tasks to point to the stereoscopic depth jumps as quickly and accurately as possible and then immediately withdraw to the start position within a limited time frame (MT ≤ 300 ms).
Every participant made 200 hand pointing movements (i.e., 200 trials) in each task in a counterbalanced order. In each trial, a single green circular target appeared in one of the three depth positions (d1, d2 and d3) randomly. In 20% of the trials, the target changed its position at the hand movement onset and these trials were called jump trials. The onset of hand movement was determined when the index finger with a marker (Infrared-emitting Diode) left the starting position after the target jumped to a new depth. Moreover, the target was designed to jump from d1 to d2 or d2 to d3 for participants to conveniently accomplish fast pointing in depth. The target jumped from d1 to d2 in half of the jump trials and from d2 to d3 in the other half. The remaining 160 trials were all static trials in which the target stayed in its position at a depth (53 static trials for depth d1, 53 static trials for depth d2 and 54 static trials for depth d3).
All participants started each trial with their index fingers at the starting position (SP) and were asked not to move their hands until they heard a beep sound indicating that the equipment was ready. The movement time (MT) was calculated from the hand movement onset to the time when the index finger reached the maximum position (MP) in depth. The distance of hand movement (DHM) was calculated by subtracting SP (The start position of index finger) from the MP. Therefore, the actual distances of hand movements in three different depth positions were approximately 190 mm, 230 mm and 270 mm, respectively. The trajectories of hand pointing movements were also recorded by the motion capture system during the same time period of the experiment. The offset of hand movement, i.e., the endpoint of hand movement, was obtained by computing the maximum depth position in each trial in which the participants did not stop hand movement until they withdrew to the start position. If the time of hand movement exceeded the time threshold (300 ms), participants would be given a warning tone to accelerate their hand pointing within the given time window. Before the formal experiment, every participant went through some practice trials until 20 consecutive trials were completed without errors.
Data analysis
For each participant, the mean DHM and mean MT for each type of the static trials (i.e., d1 static, d2 static and d3 static) and jump trials (i.e., the target jumping from d1 to d2 and from d2 to d3) were calculated. The movement performance of hand pointing was analyzed using two-way repeated measures ANOVA with task (“depthGO” and “depthSTOP”) and depth (“d1”, “d2” and “d3”) as within-subject factors. The MT data, DHM data and the percentages of the pointing responses were analyzed using three-way repeated measures ANOVA with 2 (task) × 2 (depth: “d1”, “d2”) × 2 (perturbation: :“jump”, “static”) design. The distribution of response time to the “corrected” class was analyzed using binomial test. In addition, the MT data for the percentages of the successfully pointing responses to the jumped targets in all jump trials were analyzed using three-way repeated measures ANOVA with 2 (task) × 2 (depth) × 2 (correction: “corrected”, “not corrected”) design. Post hoc comparisons were carried out under the Bonferroni correction (corrected p = 0.05).
Results
Endpoint data and movement time
Hand pointing movements in the two tasks (“depthGO” and “depthSTOP”) at three depths (“d1”, “d2” and “d3”) in the static trials were analyzed using two-way repeated measures ANOVA. There was no significant difference between the two tasks for the endpoint data (F(1, 12) = 0.163, p = 0.694), nor for the movement time (F(1, 12) = 0.103, p = 0.754). The main effect of depth, however, was significant for both endpoints (F(2, 24) = 397.44, p < 0.001) and movement time (F(2, 24) = 121.38, p < 0.001). Post-hoc analysis showed that there were significant differences in each pair of depths (all p < 0.001). This suggested that hand pointing to the three stereo depths in the static trials were obviously different, namely, these stereo depths (d1, d2 and d3) were accurately differentiated.
The mean endpoint data and mean movement time (as shown in Table 1) were obtained for the successful runs in the two tasks (“depthGO” and “depthSTOP”). A 2 (task) × 2 (depth) × 2 (perturbation) repeated-measures ANOVA was used to analyze the endpoints. Compared with the static trials, a main effect of depth (F(1, 12) = 428.19, p < 0.001) with a smaller DHM at depth “d1” with regard to that at depth “d2” and a main effect of perturbation (F(1, 12) = 74.92, p < 0.001) with a larger DHM were found in the jump trials. Moreover, a significant task × perturbation interaction (F(1, 12) = 6.66, p < 0.05) was also found (Figure 2A). This suggested that the participants pointed deeper in the “depthGO” tasks than in the “depthSTOP” tasks in the jump trials (p < 0.05). There were also significant main effects of depth (F(1, 12) = 43.41, p < 0.001) and perturbation (F(1, 12) = 52.36, p < 0.001) found for the movement time. The result of a significant task × perturbation interaction (F(1, 12) = 9.07, p < 0.01) revealed that participants had longer movement time in the “depthGO” tasks than in the “depthSTOP” tasks (p < 0.05) in the jump trials, as shown in Figure 2B.

Interaction effect between task and perturbation.
(A) Hand movements in the static and jump trials in the “depthGO” and “depthSTOP” tasks at depth “d1”and depth “d2”. (B) Movement time in two types of trials in the two tasks at two depths. Error bars represented the standard error of the mean.
Corrected pointing response to a new depth position
Pointing movements reaching depth d1 and d2 in the static trials and movements reaching depth d2 and d3 in the jump trials were categorized into two of the “uncorrected” and the “corrected” classes. We calculated a 95% confidence interval in depth-directional accuracy for depth d1 and d2 respectively in the static trials to determinate this classification. In the static trials, a pointing movement to a depth (d1 or d2) was classified into the “corrected” class if its endpoint was outside this confidence interval of that depth, while in the jump trials, a pointing movement to a depth (d2 or d3) belonged to the “corrected” class if its endpoint was outside this confidence interval of its initial depth (d1 or d2), otherwise it belonged to the “uncorrected” class.
The mean percentage of the “corrected” class was calculated for all trials (as shown in Table 1) and these percentages were normalized through an arcsine-root transformation. The result from the 2 (task) × 2 (depth) × 2 (perturbation) repeated-measures ANOVA showed a significant main effect of task (F(1, 12) = 7.59, p < 0.05) with a greater percentage of the “corrected” class in the “depthGO” task compared to the “depthSTOP” task and a significant main effect of perturbation (F(1, 12) = 38.60, p < 0.001) with a greater percentage of the “corrected” class in the jump trials compared to the static trials. In the jump trials, the interaction between task and perturbation was significant (F(1, 12) = 5.48, p < 0.05) and there was also a greater percentage of the “corrected” class in the “depthGO” task than in the “depthSTOP” task (t(12) = 2.62, p < 0.05). Furthermore, much more “corrected” cases in the jump trials than in the static trials in both of “depthGO” (t(12) = 4.73, p < 0.001) and “depthSTOP” (t(12) = 5.13, p < 0.001) tasks were obtained. These suggested that participants successfully corrected their hand movements to the perturbed target. In the “depthGO” task, the percentage of successful corrections to the new target positions (“corrected” class) was 39% at depth “d1” and 34% at depth “d2”, whereas the percentage of the “corrected” class was 20% at depth “d1” and 17% at depth “d2” in the “depthSTOP” task (Table 1 and Figure 3).

Percentages of the corrected trials in the “depthGO” (A) and “depthSTOP” (B) tasks.
(A) A much higher percentage in the jump trials than in the static trials in the “depthGO” task was shown. (B) A significant percentage in the jump trials in the “depthSTOP” task was shown. Error bars represented the standard error of the mean.
A binomial test was performed for the percentage of “corrected” class responses between the jump trials and static trials at every 20 ms during the movement duration, ranged from 100 to 400 ms (Figure 4). A significant difference between percentages of the “corrected” class in two types of trials (jump trial and static trial) at 220 ms (binomial p < 0.05) was found, suggesting that automatic correction occurred within this time. Moreover, a significant divergence at 260 ms (Figure 4) was observed between two tasks (“depthGO” and “depthSTOP”) in the jump trials (binomial p < 0.05).

Distribution of movement time in the “corrected” class.
The movement time ranging from 100 ms to 400 ms was separated into the non-overlapping bins with width of 20 ms. The pointing percentages of the “corrected” class in every bin were calculated. The significant difference of percentages between the static and jump trials at 220 ms and the significant difference of percentages between the “depthGO” and “depthSTOP” tasks at 260 ms were shown.
Movement time and successful movement corrections
In order to examine whether the successful correction had an impact on the movement time in the jump trials, we calculated the mean movement time for the “corrected” class with a 2 (task) × 2 (depth) × 2 (correction) repeated-measures ANOVA. A significant main effect of correction (F(1, 12) = 77.09, p < 0.001) revealed (Table 2) that the successfully corrected trials had longer movement time than the uncorrected trials. There was also a prominent effect of depth (F(1, 12) = 28.28, p < 0.001) with a longer movement time at depth “d2” compared with that at depth “d1”. Moreover, a significant effect of (task) × (correction) (F(1,12) = 9.49, p < 0.01) was found, suggesting that the successfully corrected trials had a longer movement time in the “depthGO” task than that in the “depthSTOP” task (p < 0.05).
Kinematic analysis on movement trajectories
The two-dimensional YZ plane of the three-dimensional trajectories was used to analyze kinematic change. On the Z axis indicating the depth direction, the endpoint data of hand movements were analyzed. The Y axis indicated the vertical direction perpendicular to the horizontal plane and the data were not used for hand movement analysis because the circular planes at three depth positions were the same along this axis in all conditions. The data in the × (horizontal) direction were not analyzed and were excluded too. In addition to the analyses on movement time and endpoint, movement trajectories were also analysed4,19. In order to examine the trajectories of hand movements in the experiment, the average spatial trajectories and accelerations were computed for every trial type (jump and static) and task type (“depthGO” and “depthSTOP”). The positive direction of acceleration was the same as the direction of the new target position.
The average spatial trajectories of hand pointing were calculated in the YZ plane to find what time automatic correction would occur. These trajectory data in the YZ plane were extracted from the raw data recorded by the motion capture system. As shown in Figure 5, the obvious change of pointing trajectories when the target jumped and an earlier deviation in the jump trials was found in the “depthSTOP” task. The endpoint data of corrected and uncorrected trials were calculated (Table 2). The corrections in the “depthGO” task were 35 mm and 31 mm of the 40 mm change at depth d1 and d2 respectively. The corrected and uncorrected trajectories in the “depthGO” task were shown in Figure 5 and the magnitudes of corrections were shown in Figure 5C and Figure 5D.

Mean pointing trajectories for the static and jump trials and for the corrected and uncorrected trials.
The time at which the hand movement began to deviate toward a perturbed target was calculated on the basis of the trajectory profiles and the intervals (5 ms) between the adjacent data points on the curves. The deviation toward the perturbed target appeared at 180 ms in the “depthGO” task and 175 ms in the “depthSTOP” task at depth d1 (A), while the deviation toward the perturbed target appeared at 195 ms in the “depthGO” task and 190 ms in the “depthSTOP” task at depth d2 (B). The corrected and uncorrected trajectories in the “depthGO” task were drawn at depth d1 (C) and depth d2 (D). Please note that the reason for the trajectories showing curved at the end in the jump trials is that the participants' index fingers sometimes exceeded the target height and then went down to point to the target position after automatic correction occurred in the jump trials, although they were asked to point as accurately as possible to the target position in each trial.
The acceleration of pointing movements was calculated for the static trials and jump trials in the two tasks within a time window (100–300 ms) (shown in Figure 6). A significant difference of acceleration between the jump trials and static trials was found at the time of 190 ms (t(12) = 5.86, p < 0.05), suggesting that automatic correction occurred within this time frame.

Mean accelerations for two types of trials in two tasks.
The accelerations of hand movements in the static trials and jump trials at depth “d1” (A) and depth “d2” (B) were shown. The mean accelerations in the static trials were shown greater than those in the jump trials due to the fact that hand moving acceleration derived from trajectory change of hand movements would decrease after the target jumped.
Order effect analysis on hand pointings
This analysis was performed to examine whether the order of pointing from depth “d1 to d2” and “d2 to d3” had an order effect to influence the participants' performance in the experiment. The average movement time (MT) and the percentages of successfully pointing responses for the first half of the jump trials (FHT) and the other half (LHT) were calculated. A 2 (depth) × 2 (order: “FHT”, “LHT”) repeated-measures ANOVA was performed for the mean MT and the percentages of successfully pointing responses. Neither the main effects of the MT and percentage data, nor the interaction effects of depth and order on the MT and percentage data were found to be significant. These results proved that the order or pattern of depth jump designed in this experiment had no significant effect on improving the participants' performance in the pointing tasks.
Discussion
In this work, an experiment was designed to investigate whether stereoscopic depth in 3D vision could drive fast automatic corrections of hand movements.
Our results indicated that both the task and trial type had an effect on the corrections of hand movements. The jump trials showed larger DHM and longer MT than the static trials, same as those reported in the studies on monocular cue jump3,4,17,18,19. Consistent with the previous findings4,14, we found that DHM and MT were significantly different between the tasks (“depthGO” and “depthSTOP”) in the jump trials (p < 0.05) but not in the static (i.e., unperturbed) trials (Figure 2). Moreover, the successful correction in the jump trials had longer movement time (Table 2), which was also found in the previous study14. The above results suggested that the unpredictable change in depth could trigger the automatic correction of hand movements and influence visuomotor processing for the redirected movement trajectories.
In accordance with previous findings3,4,14,15,25, we observed much greater percentage of “corrected” class in the jump trials than in the static trials in both “depthGO” and the “depthSTOP” tasks (Table 1 and Figure 3). This result clearly revealed that automatic corrections of hand pointing in response to depth jumps occurred in two kinds of tasks in the jump trials. In our experiment, the corrections occurred in 40% of the movements in the “depthGO” task and 20% of the movements in the “depthSTOP” task. Such percentages were not inconsistent with previous studies on automatic correction. For example, the corrections were about 30% in the GO task and 9% in the STOP task in the work of Pisella et al.3, 39% in the 2-target GO task and 21% in the STOP task in the work of Cameron et al.25 and 40.5% in the GO task and 36% in the STOP task in the work of Cameron et al.14. Although Cressman et al.4 reported a high correction percentage of 84% in the GO task, over 700 training trials were actually used for every participant before the experiment started. Furthermore, consistent with the results of Pisella et al.3 and Cameron et al.15, a greater percentage of the “corrected” class in the “depthGO” task than in the “depthSTOP” task (t(12) = 2.62, p < 0.05) was found in the jump trials (Table 1 and Figure 3). These results indicated that the directed movements in the “depthSTOP” task were influenced by the automatic correction in that some of the movements failed to stop in this task.
We also examined the time window for automatic correction to occur in response to depth jumps through the endpoint analysis. As shown in Figure 4, a significant difference of the “corrected” movement percentages between the jump and static trials was found at 220 ms and the significant divergence of corrections between two tasks in the jump trials occurred at 260 ms. This result showed that automatic correction driven by a stereoscopic depth jump could fully escape the intentional control within a time window of 220 ms to 260 ms, no matter the tasks. Beyond the time window, the intentional control could prevail against automatic correction to handle hand movements. This is consistent with the findings by Pisella et al.3, which reported that automatic correction in response to location jump in 2D vision started at 200 ms and began to differ between the two tasks at 240 ms.
Furthermore, the analysis on the trajectories and acceleration of hand movements could provide another time window for automatic correction. The detailed analysis of our results showed that automatic correction could occur within 190 ms (Figure 6). Although Cressman et al.4 reported that automatic correction in response to location jumps could occur within 150 ms in 2D vision, results of our experiment were more consistent with previous evidences from the binocular disparity experiments for automatic correction. Brenner et al.24 tested the effect of binocular disparities on fast automatic correction and they identified that a relatively slow time (200 ms) was required to respond to the change in binocular disparity. Van Mierlo et al.26 also investigated the fast response to the change of a slant cue in binocular disparity and it was confirmed that participants could use 200 ms to quickly respond to the slant cue change. They both suggested that automatic correction of hand movements to the binocular cue changes required a longer time than the monocular cue changes. The time window of automatic correction (within 190 ms) resulting from our kinematic analysis was different from that of the endpoint analysis (within 220 ms), suggesting that the kinematic analysis could provide a more sensitive index of “automaticity”, which is in agreement with the previous results4,19.
Conclusions
In conclusion, the results in this experiment suggested that stereoscopic depth could drive fast automatic corrections of hand movements. The analyses of the movement endpoint data and kinematic trajectories clearly demonstrated that automatic correction evoked by depth could elicit fast corrective pointing movements before participants were aware of their intentional modifications. The automatic correction of hand pointing in response to a depth jump could occur within as early as 190 ms.
References
Goodale, M. A., Pélisson, D. & Prablanc, C. Large adjustments in visually guided reaching do not depend on vision of the hand or perception of target displacement. Nature. 320, 748–750 (1986).
Pelisson, D., Prablanc, C., Goodale, M. A. & Jeannerod, M. Visual control of reaching movements without vision of the limb. Exp Brain Res. 62, 303–311 (1986).
Pisella, L. et al. An ‘automatic pilot’ for the hand in human posterior parietal cortex: toward reinterpreting optic ataxia. Nat Neurosci. 3, 729–736 (2000).
Cressman, E. K., Franks, I. M., Enns, J. T. & Chua, R. No automatic pilot for visually guided aiming based on colour. Exp Brain Res. 171, 174–183 (2006).
Goodale, M. A. & Milner, A. D. Separate visual pathways for perception and action. Trends Neurosci. 15, 20–25 (1992).
Desmurget, M. et al. Role of the posterior parietal cortex in updating reaching movements to a visual target. Nat Neurosci. 2, 563–567 (1999).
Goodale, M. A. & Westwood, D. A. An evolving view of duplex vision: separate but interacting cortical pathways for perception and action. Curr Opin Neurobiol. 14, 203–211 (2004).
Milner, A. D., Goodale, M. A. & Vingrys, A. J. The visual brain in action. 2nd edition. (Oxford University Press, Oxford, 2006).
Bridgeman, B. Interactions between vision for perception and vision for behavior. Beyond dissociation: Interaction between dissociated implicit and explicit processing. 22, 17–40 (2000).
Blangero, A. et al. A hand and a field effect in on-line motor control in unilateral optic ataxia. Cortex. 44, 560–568 (2008).
Desmurget, M. et al. Integrated control of hand transport and orientation during prehension movements. Exp Brain Res. 110, 265–278 (1996).
Tunik, E., Frey, S. H. & Grafton, S. T. Virtual lesions of the anterior intraparietal area disrupt goal-dependent on-line adjustments of grasp. Nat Neurosci. 8, 505–511 (2005).
Fan, J., He, J. & Tillery, S. I. H. Control of hand orientation and arm movement during reach and grasp. Exp Brain Res. 171, 283–296 (2006).
Striemer, C. L., Yukovsky, J. & Goodale, M. A. Can intention override the ‘automatic pilot’? Exp Brain Res. 202, 623–632 (2010).
Cameron, B. D., Cressman, E. K., Franks, I. M. & Chua, R. Cognitive constraint on the ‘automatic pilot’ for the hand: movement intention influences the hand's susceptibility to involuntary online corrections. Conscious Cogn. 18, 646–652 (2009).
Brenner, E. & Smeets, J. B. Colour vision can contribute to fast corrections of arm movements. Exp Brain Res. 158, 302–307 (2004).
McIntosh, R. D., Mulroue, A. & Brockmole, J. R. How automatic is the hand's automatic pilot? Exp Brain Res. 206, 257–269 (2010).
Wijdenes, L. O., Brenner, E. & Smeets, J. B. Fast and fine-tuned corrections when the target of a hand movement is displaced. Exp Brain Res. 214, 453–462 (2011).
Day, B. L. & Lyon, I. N. Voluntary modification of automatic arm movements evoked by motion of a visual target. Exp Brain Res. 130, 159–168 (2000).
Himmelbach, M. et al. A general deficit of the ‘automatic pilot’ with posterior parietal cortex lesions? Neuropsychologia. 44, 2749–2756 (2006).
Paulignan, Y., MacKenzie, C., Marteniuk, R. & Jeannerod, M. Selective perturbation of visual input during prehension movements. Exp Brain Res. 83, 502–512 (1991).
Servos, P., Goodale, M. A. & Jakobson, L. S. The role of binocular vision in prehension: a kinematic analysis. Vision Res. 32, 1513–1521 (1992).
Jackson, S. R., Jones, C. A., Newport, R. & Pritchard, C. A kinematic analysis of goal-directed prehension movements executed under binocular, monocular and memory-guided viewing conditions. Visual Cognition. 4, 113–142 (1997).
Brenner, E. & Smeets, J. B. Two eyes in action. Exp Brain Res. 170, 302–311 (2006).
Cameron, B. D., Franks, I. M., Enns, J. T. & Chua, R. Dual-target interference for the ‘automatic pilot’ in the dorsal stream. Exp Brain Res. 181, 297–305 (2007).
van Mierlo, C. M., Louw, S., Smeets, J. B. & Brenner, E. Slant cues are processed with different latencies for the online control of movement. J Vis. 9, 21–25 (2009).
Parker, A. J. Binocular depth perception and the cerebral cortex. Nat Rev Neurosci. 8, 379–391 (2007).
Acknowledgements
This work was supported by the Grants from the National Natural Science Foundation of China (60970062 and 61173116) and the Doctoral Fund of Ministry of Education of China (20110072110014).
Author information
Authors and Affiliations
Contributions
Y.R.S. and F.W. supervised the project; Y.L.S. and Z.J.H. designed the experiment; Y.L.S. performed experiments, analyzed and processed data and made figures; Y.L.S. and Z.J.H. wrote the paper; Y.R.S. and F.W. critically reviewed the paper and Y.R.S. provided the funding.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Rights and permissions
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. The images or other third party material in this article are included in the article's Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder in order to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/4.0/
About this article

Cite this article
Song, Y., Sun, Y., Zeng, J. et al. Automatic Correction of Hand Pointing in Stereoscopic Depth. Sci Rep 4, 7444 (2014). https://doi.org/10.1038/srep07444
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep07444
This article is cited by
-
rTMS over the human medial parietal cortex impairs online reaching corrections
Brain Structure and Function (2023)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
