
Abstract
We investigate the contact stiffness of an elastic half-space and a rigid indenter with randomly rough surface having a power spectrum  , where q is the wave vector. The range of
, where q is the wave vector. The range of  is studied covering a wide range of roughness types from white noise to smooth single asperities. At low forces, the contact stiffness is in all cases a power law function of the normal force with an exponent α. For H > 2, the simple Hertzian behavior is observed
is studied covering a wide range of roughness types from white noise to smooth single asperities. At low forces, the contact stiffness is in all cases a power law function of the normal force with an exponent α. For H > 2, the simple Hertzian behavior is observed  . In the range of 0 < H < 2, the Pohrt-Popov behavior is valid (
. In the range of 0 < H < 2, the Pohrt-Popov behavior is valid ( ). For H < 0, a power law with a constant power of approximately 0.9 is observed, while the exact value depends on the number of modes used to produce the rough surface. Interpretation of the three regions is given both in the frame of the three dimensional contact mechanics and the method of dimensionality reduction (MDR). The influence of the long wavelength roll-off is investigated and discussed.
). For H < 0, a power law with a constant power of approximately 0.9 is observed, while the exact value depends on the number of modes used to produce the rough surface. Interpretation of the three regions is given both in the frame of the three dimensional contact mechanics and the method of dimensionality reduction (MDR). The influence of the long wavelength roll-off is investigated and discussed.
Similar content being viewed by others
Introduction
Surface roughness has a major influence on many physical phenomena in contacts such as friction, wear, sealing, adhesion, as well as electrical and thermal conductivity1. Bowden and Tabor2 were first to point out that the real contact area between two bodies is typically orders of magnitude smaller than the apparent contact area. In the 1950's and 60's many studies were inspired by these findings, including basic contributions by Archard3 and Greenwood and Williamson4. In the last years, an emphasis was made on calculation of the real contact area in the contact of fractal, self-affine surfaces, showing roughness in a wide range of wave vectors5,6.
In the present paper, we investigate the contact stiffness of rough contacts. Contact stiffness is one of the key quantities in the contact mechanics of elastic bodies7. It can easily be deduced from experiments and has exact analytical proportionality to the lateral stiffness8 as well as the thermal and electrical interfacial conductivity9,10,11. Therefore in the past, the contact stiffness has been investigated using numerical methods6 as well as in the frame of different contact theories.
We consider self-affine surfaces with the power spectral density being a power-law function of the wave vector q:

In the range of 0 < H < 1, an equivalent fractal dimension ranging from 2 to 3 can be associated with these surfaces:

Self-affine surfaces are often investigated in this particular range, but eq. (1) does not naturally impose such a restriction. We numerically generated surfaces with H from −1 to 3 and solved the three-dimensional contact problem for a wide range of normal forces FN. At low forces, the contact stiffness k was found to rise with the force according to a power law

where d is the indentation depth and α a constant power. The result (3) is an issue of contemporary controversial discussion. The Greenwood and Williamson model4 predicts for the contact stiffness approximate proportionality to the normal force

where h is the rms roughness of the surface:

qmin and qmax are the minimum and the maximum wave vectors in the power spectrum. Paggi and Barber11 found  for H = 0.7, Ciavarella et. al. find the exponent 0.610, Pohrt and Popov12 reported results of boundary element simulations giving α in the interval from 0.51 to 0.77 for H varying from 1 to 0. Later, they presented analytical arguments showing that
for H = 0.7, Ciavarella et. al. find the exponent 0.610, Pohrt and Popov12 reported results of boundary element simulations giving α in the interval from 0.51 to 0.77 for H varying from 1 to 0. Later, they presented analytical arguments showing that

in the interval  13.
13.
We will show that the main part of controversy may be due to the fact that the power α is a function of the parameter H. Depending on the character of the roughness, all values of α between  and 1 can be observed.
and 1 can be observed.
Results
We considered a rigid flat indenter superimposed with a roughness produced using the spectral power density (1). The indenter was pressed into an elastic half-space and the dependence of the contact stiffness on the indentation depth was determined numerically using the 3D boundary element method (BEM). In each case, the contact stiffness at low forces was found to rise with the force according to a power law (3). The dependency of the exponent α on the Hurst exponent is shown in Fig. 1 (gray dashed lines). Three regions with qualitatively different behavior can be identified. For H < 0 the exponent α is almost constant but depends on the grid size used. For 0< H < 2, α decreases and follows accurately the thin black line of the Pohrt/Popov relation13,14 α = (H + 1)−1. For values of H greater than 2, the exponent α remains approximately constant and equal to  .
.

Dependency of the power α in the force-stiffness-relation (3) on H.
The gray dashed lines are results of a 3D Boundary Element study. The blue bold lines are obtained using the 1D method of dimensionality reduction. The following grid sizes were used (following the arrows):  in BEM calculations and
in BEM calculations and  in MDR calculations. For values H < 0, α is found to be a function of the grid size N in both 3D and 1D simulations, but it appears independent of H, see eq. (24). Values of H > 2 lead to
in MDR calculations. For values H < 0, α is found to be a function of the grid size N in both 3D and 1D simulations, but it appears independent of H, see eq. (24). Values of H > 2 lead to  , corresponding to the Hertzian behavior. In the intermediate region of approximately
, corresponding to the Hertzian behavior. In the intermediate region of approximately  , the Pohrt/Popov-relation (fine black line)
, the Pohrt/Popov-relation (fine black line)  applies13,14.
applies13,14.
In13, it was shown that for 0 < H < 1 the contact stiffness of rough surfaces can be described using the method of dimensionality reduction (MDR)20,21. In this paper we used the same procedure as in13 but extended the studied region to −1 < H < 3. The results obtained with the MDR are shown in Fig. 1 by blue lines. The qualitative behavior obtained with both BEM and MDR is the same. Only in the region H < 0, the dependence is slightly different. Note that the results presented in Fig. 1 refer to roughness having no long wavelength cut-off or roll-off. This means that the power dependence (1) of spectral density was valid for all wave vectors up to the diameter of the indenter.
Many technical surfaces do not show the fractal behavior described by the spectrum (1) for all wave vectors. For macroscopic surfaces, the relation of the type (1) is typically valid up to some characteristic wave vector q0. For smaller wave vectors the spectral density does not increase any more according to (1) but rather remains approximately constant or even goes down. For simplicity, one often assumes that the power spectrum has either the long wavelength “roll-off ”:

or the long wave length “cut-off ”:

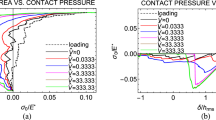
For fractal rough surfaces including a roll-off, the dependence of the normal contact stiffness on normal force is shown in Fig. 2(a). It was found to first rise in a power-law-fashion (3) with a later cross-over to an almost linear dependence, see Fig. 2 (a).

(a) Dependency of the normal contact stiffness on the normal force at nominally flat surfaces, e.g fractal rough surfaces with long-wavelength roll-off. The colored lines indicate the average of 60 surface samples for each Hurst exponent in the range  , following the arrow. At low loads, the curves follow eq. (3) with the minimum slope given by
, following the arrow. At low loads, the curves follow eq. (3) with the minimum slope given by  , see Fig. 1. At higher forces, all curves collapse into an almost linear relation (4). Results obtained by 3D BEM calculations, grid 1024 × 1024, lower roll-off at
, see Fig. 1. At higher forces, all curves collapse into an almost linear relation (4). Results obtained by 3D BEM calculations, grid 1024 × 1024, lower roll-off at  . (b) Representative contact configuration of an indentation in the region of the linear regime, H = 1.
. (b) Representative contact configuration of an indentation in the region of the linear regime, H = 1.
Discussion
First, we would like to give a physical interpretation to the above three regions of qualitatively different behavior of stiffness, in particular to the characteristic values H = 0 and H = 2 separating the three regions. As the qualitative behavior of the exponent α is identical in one- and three-dimensional cases, it is reasonable to discuss the physical nature of the identified regions for one-dimensional systems. It will be seen later, that the interpretation does not depend on the dimensionality of the system. The one-dimensional rough profiles used for simulations presented in Fig. 1, were produced according to the rule

with

random phases  on the interval
on the interval  and the one-dimensional power spectrum
and the one-dimensional power spectrum

The minimum wave number in the sum (9) is  , L is the system size.
, L is the system size.
We now introduce the notion of roughness of different scales in the following way. Starting with qmin, we can carry out the summation in (9) over exponentially increasing intervals  with
with

The result of the integration over the n-th interval, we will call “roughness at the n-th scale”. The rms roughness corresponding to the  scale is equal to
scale is equal to

Depending on the parameter H, different relations between roughness of scales with increasing number n are possible.
For H < 0, the rms roughness at each smaller scale (corresponding to smaller wave length or to larger wave vectors) is larger than that of the preceding scale: hn+1 > hn. This means that the roughness of the smallest scale (largest wave number) dominates the contact behavior. For the force at which the roughness of the smallest scale will be flattened out completely, almost complete contact will be achieved. For much lower forces, the surface will thus act as a large number of independent asperities giving rise to an approximately linear dependence of the stiffness on the normal force (the GW type behavior).
For H > 2, the rms curvature of each smaller scale is smaller than that of the preceding larger scale:  . This means that each global peak will have no further local maxima and minima: the whole system will act as only one single asperity, thus leading to the classical result of Hertz15:
. This means that each global peak will have no further local maxima and minima: the whole system will act as only one single asperity, thus leading to the classical result of Hertz15:  .
.
As the replacement of a surface with the power spectrum (1) by a line with the power spectrum (11) leaves the relations of the rms roughness and rms curvatures at different scales invariant, the above arguments are equally applicable to the three-dimensional systems.
In the intermediate region with 0 < H < 2 there will be always some scales (up to n), at which the roughness is flattened out completely while this is not the case on larger scales (as shown with line d3 in Fig. 3. In this case, the system acts as only one single asperity of the scale  with the indentation depth corresponding to the roughness of the previous scale. Applying the Hertz theory, this gives the following estimation for the normal force
with the indentation depth corresponding to the roughness of the previous scale. Applying the Hertz theory, this gives the following estimation for the normal force

and for the normal stiffness

where  is the order of magnitude of the radius of curvature at the n-th scale. Determining qn from (14) and substituting in (15) gives
is the order of magnitude of the radius of curvature at the n-th scale. Determining qn from (14) and substituting in (15) gives  . This direct derivation from the 1D line topography thus leads to the same result as the geometrical 3D derivation given in13,14.
. This direct derivation from the 1D line topography thus leads to the same result as the geometrical 3D derivation given in13,14.

Example of a rough line with 3 scales.
H = 0.9.
Let us now discuss the left hand region H < 0 in Fig. 1. In this region, the power α practically does not depend on the parameter H. We will, however, show that it shows a weak dependence on the grid size or on the number of modes used for the generation of the rough surface.
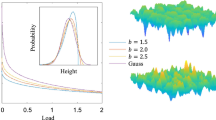
It can be easily seen that the contact stiffness is closely related to the height distribution of the profile. Often, some standard distribution is assumed, e.g. an exponential one or a Gaussian distribution. We will show that the real distribution of heights is neither of both and that it depends on the number of modes. Let  be the probability density of the heights of the profile, starting with the highest point. In MDR, every spring element has to be indented independently, so the normal force is expressed as
be the probability density of the heights of the profile, starting with the highest point. In MDR, every spring element has to be indented independently, so the normal force is expressed as

Assuming a power-law function  , we obtain for the force
, we obtain for the force

and for the stiffness  . Thus, the dependence of the stiffness on the normal force is given by
. Thus, the dependence of the stiffness on the normal force is given by  . We therefore come to the relation
. We therefore come to the relation

We will now show how to determine β from the number of modes of the rough line that is generated in the 1D case with the help of (9). The summation is carried out over N = 2m harmonics. Let us first consider a single harmonic, as shown in Fig. 4 (a). In the vicinity of an extremum, the sine function can by approximated as

(Note that the z-axis starts at the maximum and shows downward). The corresponding height distribution is equal to

A superposition of two waves with similar wave number will produce beats as shown in Fig. 4 (b). In the vicinity of a global maximum, this is a series of parabolic extrema positioned along one parabolic curve of another scale. The resulting height distribution of the whole system is readily determined by the integration

resulting in a constant height probability density. Similarly, four modes will generate a modulated beat wave (beat wave of the 2nd kind, see Fig. 4 (c)) with the height distribution

It can be seen that increasing the number of modes by the factor of 2 increases the power of the height distribution by  thus leading to the final equation
thus leading to the final equation

With the power α from eq. (18), we get

For this result to be valid, the amplitudes of the summed waves must not differ too much, as can be seen from the 2nd step already. However, exact equality is not needed: the beat wave's behavior near the maximum is not altered when two sine waves are added with different but close amplitudes. For this reason, (24) is valid not only for H = 0, but also for smaller values of fractal rough surfaces. Fig. 5 shows the numerically determined values of α in comparison with eq. (24). In the case of MDR, the results coincide very well. In 3D, the numerical dependency seems to be similar, but we cannot present an equivalent derivation at this point.

Different numbers of superposed sine waves.
(a) one single sine wave. (b) two sine waves with close frequencies result in a beat wave. (c) beat wave of the 2nd kind using 4 modes. (d) beat wave of the 3rd kind using 8 modes.

Numerically observed dependency of the exponent α in eq. (3) for H < 0 on the grid size N.
See the limiting left hand side of Fig. 1 for reference. Black crosses show the dependency for the 1D analysis. The red line is according to eq. (24). With the 3D BEM and one data set, both interpretations of N are shown with colored crosses. For example, a grid of 1024 × 1024 can be seen as 210 lines (green cross) or 220 total grid points (purple cross).
We have seen that the exact value of α for H < 0 depends on the number of modes used in simulation. This derivation is valid for any surface spectrum that does not decay too rapidly with increasing wave vector. In particular, this is true for nominally flat surfaces, so it is sensible to discuss the findings of Fig. 2 in this context as well. The surfaces treated there exhibit a roll-off at  , so the corresponding wavelength was
, so the corresponding wavelength was  of the system-size. Therefore, the surface topography shows multiple local maxima as illustrated in Fig. 2b. When brought into contact, only the highest asperity touches at first, resulting in a dependence according to (3). At higher forces, the normal force is carried by multiple local maxima and the dependency becomes almost linear. This result is in agreement with16, where a linear relation is identified under the condition that “there is a statistical ensemble of high peaks in contact”.
of the system-size. Therefore, the surface topography shows multiple local maxima as illustrated in Fig. 2b. When brought into contact, only the highest asperity touches at first, resulting in a dependence according to (3). At higher forces, the normal force is carried by multiple local maxima and the dependency becomes almost linear. This result is in agreement with16, where a linear relation is identified under the condition that “there is a statistical ensemble of high peaks in contact”.
In [21, Chapter 10], the provenance of the linear region is explained by tracing it back to the Greenwood-Williamson case. The basic idea is the following: A nominally flat surface, whose characteristic roughness wavelength  is considerably shorter than the system size L, will have multiple local maxima with a characteristic distance of
is considerably shorter than the system size L, will have multiple local maxima with a characteristic distance of  . When considering small forces with multiple contact zones resulting from these local maxima, elastic coupling must be included for all points that interact within one zone of contact. In contrast, while these zones are still small compared to
. When considering small forces with multiple contact zones resulting from these local maxima, elastic coupling must be included for all points that interact within one zone of contact. In contrast, while these zones are still small compared to  , it is reasonable to say that the interactions in between local maxima may be neglected. Fig. 2 (b) shows a typical configuration of contact spots. The roll-off wavelength
, it is reasonable to say that the interactions in between local maxima may be neglected. Fig. 2 (b) shows a typical configuration of contact spots. The roll-off wavelength  is indeed a characteristic distance between the particular spots. Note that this simulation took into account all elastic couplings, including those between distant contact spots.
is indeed a characteristic distance between the particular spots. Note that this simulation took into account all elastic couplings, including those between distant contact spots.
In the original GW-model, the independent single asperities behave in a Hertzian fashion:

Thus for a single Hertzian indenter, the force depends on the indentation depth in the following manner

Of course the relation includes elastic coupling within the asperity contact. With the Pohrt/Popov-law (6), we find for a single fractal indenter

In the GW model, the linear force-stiffness relation is obtained by assuming an exponential height distribution of the local top peaks and by integrating the forces for all asperities that have come into contact. For the result to be linear, the power in (3) does not need to be  , the final result of
, the final result of  does not depend on this power21.
does not depend on this power21.
These results can be linked back to Fig. 1. Indeed the power spectrum with roll-off is assumed to be constant for any  . The power spectrum being constant corresponds to
. The power spectrum being constant corresponds to  and thus H = −1. For surfaces with roll-off we thus naturally assume the power α in the vicinity of 1. However, we predict a weak dependency of the exact value on the smallest-scale corrugations. This may explain the scattering of the exponent α which can be found in the literature in both numerical and experimental works. In particular, large-scale simulations of nominally flat surfaces conducted in the past suggested
and thus H = −1. For surfaces with roll-off we thus naturally assume the power α in the vicinity of 1. However, we predict a weak dependency of the exact value on the smallest-scale corrugations. This may explain the scattering of the exponent α which can be found in the literature in both numerical and experimental works. In particular, large-scale simulations of nominally flat surfaces conducted in the past suggested  , see17. Initially this was seen as a contradiction to the findings of the authors. In fact Fig. 5 reveals that the better the grid resolution of a numerical investigation, the closer the dependence is to a linear law for nominally flat surfaces.
, see17. Initially this was seen as a contradiction to the findings of the authors. In fact Fig. 5 reveals that the better the grid resolution of a numerical investigation, the closer the dependence is to a linear law for nominally flat surfaces.
In the current theoretical investigation, all deformations were assumed to be elastic. When considering the contact stiffness and related quantities, this is no major drawback as soon as  . Indeed, the contact stress at any particular scale has the order of magnitude
. Indeed, the contact stress at any particular scale has the order of magnitude  , where
, where  is the rms surface gradient corresponding to this scale5. For
is the rms surface gradient corresponding to this scale5. For  , the rms value of surface roughness
, the rms value of surface roughness  diverges at the upper integration limit. The surface gradient thus is primarily determined by roughness with the shortest wave length and the breakdown of the elastic behavior occurs at the smallest scales corresponding to the largest rms slope. In contrast, the contact stiffness is determined by the largest wavelength in the power spectrum of the surface roughness, up to the macroscopic size of the current contact spot. It is thus dominated by the long wavelength part of the spectrum and is not sensible to the occurrence at the microscopic scale.
diverges at the upper integration limit. The surface gradient thus is primarily determined by roughness with the shortest wave length and the breakdown of the elastic behavior occurs at the smallest scales corresponding to the largest rms slope. In contrast, the contact stiffness is determined by the largest wavelength in the power spectrum of the surface roughness, up to the macroscopic size of the current contact spot. It is thus dominated by the long wavelength part of the spectrum and is not sensible to the occurrence at the microscopic scale.
Methods
BEM calculations
The 3D Boundary element method was used to solve the dry contact problem. For a given normal force, the apparent area of contact must be partitioned into two sections. Points that are considered to be in contact must all be deflected to the same height and have positive pressure. All other points are considered not to be in contact, so they must satisfy the condition of zero pressure and a positive gap width to the constant plane of those points that are in contact. Finding the correct partitioning and redistributing the load within the contact region is done with iterative steps. We used the CG-approach proposed by Polonsky and Keer18, while for smooth surfaces the local-relaxation approach by Venner and Lubrecht19 may be more suitable. All discrete grid points influence each other via the elastic coupling, a discrete formulation of the Boussinesq formula for the indentation of an elastic half-space. For this reason, the BEM needs to deal with full (not sparse) matrices, causing the calculations to be costly.
Once the contact problem for a given value of the normal force is solved, the pressure distribution and the resulting deflections are known. The contact stiffness is then determined by taking the resulting partitioning and this time solving the pressures necessary to deflect all contact-points by a constant distance  . The effective stiffness can be deduced from the resulting force
. The effective stiffness can be deduced from the resulting force  as
as  . This last step can be done independently from the actual rough-surface-problem, as the contact stiffness only depends on the specific partitioning, but not on the surface topography or pressure distribution.
. This last step can be done independently from the actual rough-surface-problem, as the contact stiffness only depends on the specific partitioning, but not on the surface topography or pressure distribution.
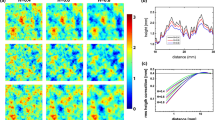
We generated surfaces with Hurst exponents from −1 to 3 using the inverse Fourier transform. In the range  , surfaces with power spectrum (1) have the property of self-affinity with the Hurst Exponent H. Fig. 6 shows some numerically generated samples of self-affine surfaces in a grayscale plot as well as corresponding self-affine lines, which can be interpreted as characteristic cuts through the 3D surfaces. For these surfaces we solved the contact problem for a wide range of normal forces FN and determined the resulting contact stiffness. The 3D simulations have been carried out with free boundary conditions outside the apparent contact region and averaging over 60 realizations for every value of H.
, surfaces with power spectrum (1) have the property of self-affinity with the Hurst Exponent H. Fig. 6 shows some numerically generated samples of self-affine surfaces in a grayscale plot as well as corresponding self-affine lines, which can be interpreted as characteristic cuts through the 3D surfaces. For these surfaces we solved the contact problem for a wide range of normal forces FN and determined the resulting contact stiffness. The 3D simulations have been carried out with free boundary conditions outside the apparent contact region and averaging over 60 realizations for every value of H.

Samples of randomly rough surfaces with different Hurst Exponent H.
The upper images show gray-scale plots of 3D surfaces. Below, corresponding rough lines are shown having the same self-similarity as their 3D counterpart. These lines can be seen as characteristic cuts through the surfaces. All surfaces and lines have been generated using the inverse Fast Fourier Transform. The samples shown here do not include a cut-off or roll-off.
1D MDR calculation
The method of dimensionality reduction is a numerical tool for solving contact problems. It has been described in detail in a recent review paper20 as well as in the monograph21. Starting from the power-spectrum of a three-dimensional surface, a rough line is generated using

In the case of fractal surfaces we obtain

Again, fractal rough lines have been generated using the inverse Fourier transform with random phases. As in the 3D case, we considered spectra with no roll-off or cut-off. Instead, eq. (29) was valid all the way from the system size L down to the grid spacing  . Random samples of these rough lines can be found in Fig. 6. The newly generated lines also include the self-similar property with the same Hurst exponent as their 3D counterparts, so these samples can be considered characteristic cuts through the equivalent 3D surfaces.
. Random samples of these rough lines can be found in Fig. 6. The newly generated lines also include the self-similar property with the same Hurst exponent as their 3D counterparts, so these samples can be considered characteristic cuts through the equivalent 3D surfaces.
In the MDR the discrete elements of the rough line are independent, so the complexity of the numerical process is linear in the total number of line points N. For this reason, all simulations could be done quickly, allowing for parameter studies with high resolution and 500 samples in each case.
References
Popov, V. L. Contact Mechanics And Friction. Physical Principles And Applications (Springer-Verlag, Heidelberg, 2010).
Bowden, F. P. & Tabor, D. The Friction And Lubrication Of Solids (Clarendon Press, Oxford, 1986).
Archard, J. F. Elastic deformation and the laws of friction. Proc. R. Soc. A 243, 190 (1957).
Greenwood, J. A. & Williamson, J. B. P. Contact of nominally flat surfaces. Proc. R. Soc. A 295, 300 (1966).
Hyun, S. & Robbins, M. O. Elastic contact between rough surfaces: effect of roughness at large and small wavelengths. Tribol. Intern. 40, 1413 (2007).
Campana, C. & Müser, M. H. Practical Green's function approach to the simulation of elastic semi-infinite solids. Phys. Rev. B 74, 075420 (2006).
Akarapu, S., Sharp, T. & Robbins, M. O. Stiffness of contacts between rough surfaces. Phys. Rev. Lett. 106, 204301 (2011).
Campana, C., Persson, B. N. J. & Müser, M. H. Transverse and normal interfacial stiffness of solids with randomly rough surfaces. J. Phys. Cond. Matter. 23, 085001 (2011).
Barber, J. R. Bounds on the electrical resistance between contacting elastic rough bodies. Proc R. Soc. Lond. A 495, 53–66 (2003).
Ciavarella, M., Dibello, S. & Demelio, G. Conductance of rough random profiles. Int. J. Solids & Structures 45, 879–893 (2007).
Paggi, M. & Barber, J. Contact conductance of rough surfaces composed of modified RMD patches. Int. J. of heat and mass transfer 54, 4664–8 (2011).
Pohrt, R. & Popov, V. L. Normal contact stiffness of elastic solids with fractal rough surfaces. Phys. Rev. Lett. 108, 104301 (2012).
Pohrt, R., Popov, V. L. & Filippov, A. E. Investigation of the dry normal contact between fractal rough surfaces using the reduction method, comparison to 3D simulations. Phys. Rev. E 86, 026710 (2012).
Pohrt, R. & Popov, V. L. Investigation of the dry normal contact between fractal rough surfaces using the reduction method, comparison to 3D simulations. Phys. Mesomech. 15, 275–279 (2012).
Hertz, H. Über die Berührung fester elastischer Körper. Journal für die reine und angewandte Mathematik 92, 156–15 (1881).
Pastewka, L., Prodanov, N., Lorenz, B., Müser, M. H., Robbins, M. O. & Persson, B. N. J. Finite-size scaling in the interfacial stiffness of rough elastic contacts. Phys. Rev. E 87, 062809 (2013).
Campana, C., Müser, M. H. & Robbins, M. O. Elastic contact between self-affine surfaces: Comparison of numerical stress and contact correlation functions with analytic predictions. J. Phys.: Condens. Matter 20, 355013, 1–12 (2008).
Polonsky, I. A. & Keer, L. M. A numerical method for solving rough contact problems based on the multi-level multi-summation and conjugate gradient techniques. Wear 231, 206–210 (1999).
Venner, C. H. & Lubrecht, A. A. Multilevel Methods in Lubrication (Elsevier, Amsterdam 2000).
Popov, V. L. Method of reduction of dimensionality in contact and friction mechanics: A linkage between micro and macro scales. Friction 1, 41–62 (2013).
Popov, V. L. & Heß, M. Methode der Dimensionsreduktion in Kontaktmechanik und Reibung (Springer-Verlag, Heidelberg, 2013).
Acknowledgements
We acknowledge financial support by the Deutsche Forschungsgemeinschaft (DFG).
Author information
Authors and Affiliations
Contributions
R.P. performed the BEM and MDR calculations, both authors (R.P. and V.P.) carried out the analysis and contributed to the writing of the manuscript.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Rights and permissions
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3.0/
About this article
Cite this article
Pohrt, R., Popov, V. Contact stiffness of randomly rough surfaces. Sci Rep 3, 3293 (2013). https://doi.org/10.1038/srep03293
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep03293
This article is cited by
-
Prediction and suppression of chaotic instability in brake squeal
Nonlinear Dynamics (2022)
-
On the stiffness of surfaces with non-Gaussian height distribution
Scientific Reports (2021)
-
Interfacial contact stiffness of fractal rough surfaces
Scientific Reports (2017)
-
The Role of Surface Structure in Normal Contact Stiffness
Experimental Mechanics (2016)
-
On the role of scales in contact mechanics and friction between elastomers and randomly rough self-affine surfaces
Scientific Reports (2015)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
