
Abstract
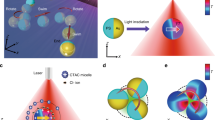
When photons interact with matter, forces and torques occur due to the transfer of linear and angular momentum, respectively. The resulting accelerations are small for macroscopic objects but become substantial for microscopic objects with small masses and moments of inertia, rendering photon recoil very attractive to propel micro- and nano-objects. However, until now, using light to control object motion in two or three dimensions in all three or six degrees of freedom has remained an unsolved challenge. Here we demonstrate light-driven microdrones (size roughly 2 μm and mass roughly 2 pg) in an aqueous environment that can be manoeuvred in two dimensions in all three independent degrees of freedom (two translational and one rotational) using two overlapping unfocused light fields of 830 and 980 nm wavelength. To actuate the microdrones independent of their orientation, we use up to four individually addressable chiral plasmonic nanoantennas acting as nanomotors that resonantly scatter the circular polarization components of the driving light into well-defined directions. The microdrones are manoeuvred by only adjusting the optical power for each motor (the power of each circular polarization component of each wavelength). The actuation concept is therefore similar to that of macroscopic multirotor drones. As a result, we demonstrate manual steering of the microdrones along complex paths. Since all degrees of freedom can be addressed independently and directly, feedback control loops may be used to counteract Brownian motion. We posit that the microdrones can find applications in transport and release of cargos, nanomanipulation, and local probing and sensing of nano and mesoscale objects.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$29.99 / 30 days
cancel any time
Subscribe to this journal
Receive 12 print issues and online access
$259.00 per year
only $21.58 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout






Similar content being viewed by others
Data availability
The data for Fig. 5b are provided as source data with this paper. Other data supporting the conclusions of this study are available in the paper (including Supplementary Information).
Code availability
The codes used during this study are available from the corresponding authors upon reasonable request.
References
Ashkin, A. Applications of laser radiation pressure. Science 210, 1081–1088 (1980).
Cohen-Tannoudji, C. Manipulating atoms with photons. Phys. Scr. T76, 33–40 (1998).
Ashkin, A. Atomic-beam deflection by resonance-radiation pressure. Phys. Rev. Lett. 25, 1321–1324 (1970).
Ashkin, A. Acceleration and trapping of particles by radiation pressure. Phys. Rev. Lett. 24, 156–159 (1970).
Maragò, O. M., Jones, P. H., Gucciardi, P. G., Volpe, G. & Ferrari, A. C. Optical trapping and manipulation of nanostructures. Nat. Nanotech. 8, 807–819 (2013).
Aspelmeyer, M., Kippenberg, T. J. & Marquardt, F. Cavity optomechanics. Rev. Mod. Phys. 86, 1391–1452 (2014).
Ilic, O., Went, C. M. & Atwater, H. A. Nanophotonic heterostructures for efficient propulsion and radiative cooling of relativistic light sails. Nano Lett. 18, 5583–5589 (2018).
Šípová-Jungová, H., Andrén, D., Jones, S. & Käll, M. Nanoscale inorganic motors driven by light: principles, realizations, and opportunities. Chem. Rev. 120, 269–287 (2020).
Wang, J., Xiong, Z. & Tang, J. The encoding of light-driven micro/nanorobots: from single to swarming systems. Adv. Intell. Syst. 3, 2000170 (2021).
Xin, H. et al. Optical forces: from fundamental to biological applications. Adv. Mater. 32, 2001994 (2020).
Kawata, S. & Tani, T. Optically driven Mie particles in an evanescent field along a channeled waveguide. Opt. Lett. 21, 1768–1770 (1996).
Wang, K., Schonbrun, E. & Crozier, K. B. Propulsion of gold nanoparticles with surface plasmon polaritons: evidence of enhanced optical force from near-field coupling between gold particle and gold film. Nano Lett. 9, 2623–2629 (2009).
Brzobohatý, O. et al. Experimental demonstration of optical transport, sorting and self-arrangement using a ‘tractor beam’. Nat. Photon. 7, 123–127 (2013).
Búzás, A. et al. Light sailboats: laser driven autonomous microrobots. Appl. Phys. Lett. 101, 041111 (2012).
Tanaka, Y. Y. et al. Plasmonic linear nanomotor using lateral optical forces. Sci. Adv. 6, eabc3726 (2020).
Beth, R. A. Mechanical detection and measurement of the angular momentum of light. Phys. Rev. 50, 115–125 (1936).
Friese, M. E. J., Nieminen, T. A., Heckenberg, N. R. & Rubinsztein-Dunlop, H. Optical alignment and spinning of laser-trapped microscopic particles. Nature 394, 348–350 (1998).
Friese, M. E. J., Rubinsztein-Dunlop, H., Gold, J., Hagberg, P. & Hanstorp, D. Optically driven micromachine elements. Appl. Phys. Lett. 78, 547–549 (2001).
Neale, S. L., MacDonald, M. P., Dholakia, K. & Krauss, T. F. All-optical control of microfluidic components using form birefringence. Nat. Mater. 4, 530–533 (2005).
Tong, L., Miljković, V. D. & Käll, M. Alignment, rotation, and spinning of single plasmonic nanoparticles and nanowires using polarization dependent optical forces. Nano Lett. 10, 268–273 (2010).
Lehmuskero, A., Ogier, R., Gschneidtner, T., Johansson, P. & Käll, M. Ultrafast spinning of gold nanoparticles in water using circularly polarized light. Nano Lett. 13, 3129–3134 (2013).
He, H., Friese, M. E. J., Heckenberg, N. R. & Rubinsztein-Dunlop, H. Direct observation of transfer of angular momentum to absorptive particles from a laser beam with a phase singularity. Phys. Rev. Lett. 75, 826–829 (1995).
Liu, M., Zentgraf, T., Liu, Y., Bartal, G. & Zhang, X. Light-driven nanoscale plasmonic motors. Nat. Nanotech. 5, 570–573 (2010).
Yan, Z. & Scherer, N. F. Optical vortex induced rotation of silver nanowires. J. Phys. Chem. Lett. 4, 2937–2942 (2013).
Galajda, P. & Ormos, P. Orientation of flat particles in optical tweezers by linearly polarized light. Opt. Express 11, 446–451 (2003).
Rodrigo, P. J., Gammelgaard, L., Bøggild, P., Perch-Nielsen, I. R. & Glückstad, J. Actuation of microfabricated tools using multiple GPC-based counterpropagating-beam traps. Opt. Express 13, 6899–6904 (2005).
Pollard, M. R. et al. Optically trapped probes with nanometer-scale tips for femto-Newton force measurement. New J. Phys. 12, 113056 (2010).
Phillips, D. B. et al. An optically actuated surface scanning probe. Opt. Express 20, 29679–29693 (2012).
Villangca, M. J., Palima, D., Bañas, A. R. & Glückstad, J. Light-driven micro-tool equipped with a syringe function. Light: Sci. Appl. 5, e16148 (2016).
Lehmuskero, A., Li, Y., Johansson, P. & Käll, M. Plasmonic particles set into fast orbital motion by an optical vortex beam. Opt. Express 22, 4349–4356 (2014).
Zhang, Y. et al. Plasmonic tweezers: for nanoscale optical trapping and beyond. Light: Sci. Appl. 10, 59 (2021).
Chen, J., Ng, J., Lin, Z. & Chan, C. T. Optical pulling force. Nat. Photon. 5, 531–534 (2011).
Song, J.-H., Shin, J., Lim, H.-J. & Lee, Y.-H. Optical recoil of asymmetric nano-optical antenna. Opt. Express 19, 14929–14936 (2011).
Vercruysse, D. et al. Unidirectional side scattering of light by a single-element nanoantenna. Nano Lett. 13, 3843–3849 (2013).
Andrén, D. et al. Microscopic metavehicles powered and steered by embedded optical metasurfaces. Nat. Nanotech. 16, 970–974 (2021).
Wang, S. B. & Chan, C. T. Lateral optical force on chiral particles near a surface. Nat. Commun. 5, 3307 (2014).
Rodríguez-Fortuño, F. J., Engheta, N., Martínez, A. & Zayats, A. V. Lateral forces on circularly polarizable particles near a surface. Nat. Commun. 6, 8799 (2015).
Sukhov, S., Kajorndejnukul, V., Naraghi, R. R. & Dogariu, A. Dynamic consequences of optical spin–orbit interaction. Nat. Photon. 9, 809–812 (2015).
Biagioni, P., Huang, J.-S. & Hecht, B. Nanoantennas for visible and infrared radiation. Rep. Prog. Phys. 75, 024402 (2012).
Hoffmann, G., Huang, H., Waslander, S. & Tomlin, C. Quadrotor helicopter flight dynamics and control: theory and experiment. In Proc. AIAA Guidance, Navigation and Control Conference and Exhibit AIAA 2007-6461 https://doi.org/10.2514/6.2007-6461 (2007).
Castillo, P., Lozano, R. & Dzul, A. Stabilization of a mini rotorcraft with four rotors. IEEE Control Syst. Mag. 25, 45–55 (2005).
Lu, F., Lee, J., Jiang, A., Jung, S. & Belkin, M. A. Thermopile detector of light ellipticity. Nat. Commun. 7, 12994 (2016).
Huang, J.-S. et al. Atomically flat single-crystalline gold nanostructures for plasmonic nanocircuitry. Nat. Commun. 1, 150 (2010).
Ding, K., Ng, J., Zhou, L. & Chan, C. T. Realization of optical pulling forces using chirality. Phys. Rev. A 89, 063825 (2014).
Cohen, A. E. & Moerner, W. E. Suppressing Brownian motion of individual biomolecules in solution. Proc. Natl. Acad. Sci. USA 103, 4362–4365 (2006).
Shao, F. & Zenobi, R. Tip-enhanced Raman spectroscopy: principles, practice, and applications to nanospectroscopic imaging of 2D materials. Anal. Bioanal. Chem. 411, 37–61 (2019).
Xavier, J., Vincent, S., Meder, F. & Vollmer, F. Advances in optoplasmonic sensors – combining optical nano/microcavities and photonic crystals with plasmonic nanostructures and nanoparticles. Nanophotonics 7, 1–38 (2018).
Gao, W. & Wang, J. Synthetic micro/nanomotors in drug delivery. Nanoscale 6, 10486–10494 (2014).
Johnson, P. B. & Christy, R. W. Optical constants of the noble metals. Phys. Rev. B 6, 4370–4379 (1972).
Krauss, E. et al. Controlled growth of high-aspect-ratio single-crystalline gold platelets. Cryst. Growth Des. 18, 1297–1302 (2018).
Acknowledgements
Financial support by the German Research Foundation (DFG grant no. HE5618/10-1) and the Volkswagen Foundation via an ‘Experiment!’ grant (both received by B.H.) is gratefully acknowledged.
Author information
Authors and Affiliations
Contributions
B.H. and X.W. conceived the project. X.W. designed the devices, structures and experiments. X.W., G.R. and T.F. performed numerical simulations. X.W. fabricated the samples and constructed the optical setup. X.W., R.E. and J.Q. carried out the optical measurements and analysed the data. X.W. and B.H. wrote the manuscript. All authors contributed to the discussion and manuscript preparation.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Nanotechnology thanks Mikael Käll, Yun-Feng Xiao and the other, anonymous, reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Extended data
Extended Data Fig. 1 Fabrication of the gold nanomotors.
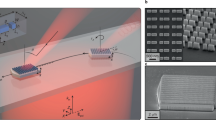
Upper row: Optical micrograph of a gold flake (a) and scanning helium ion micrographs of the nanomotor structures (b-d) after outline milling with focused helium ion beam. Lower row: Optical micrograph (a) and scanning electron micrographs (b-d) of the nanomotor structures after the gold flake is peeled off. The inset of the upper panel of a is an optical micrograph of the gold flake when its right corner is covered by a dried-out droplet of PVA solution. The outline of the gold flake and the boundary of the PVA droplet at the gold flake region are illustrate by the dashed lines in the lower panel of a.
Extended Data Fig. 2 Fabrication of the microdrone body.
a, Gold nanomotors are fabricated on top of a spin-coated HSQ layer on an ITO/glass substrate. b, An etching mask of HSQ with the same shape of the microdrone body but increased thickness is created in the first electron beam lithography (EBL) step. c, The bottom HSQ layer is etched through with buffered oxide etch (BOE). The top mask is also thinned down and the wet etching leads to an unwanted side profile. d, The sample is spin-coated with HSQ again and the final body with defined shape and dimensions is created in the second EBL step. In panels a-c, the top and bottom HSQ layers are presented in different colors for better illustration.
Extended Data Fig. 3 Transfer of microdrones to a water cell.
Reflection (a-c) and phase-contrast transmission (d) optical micrographs of microdrones of a sample at key steps of the transfer process. a, On the glass substrate after ITO etching. The microdrones have moved slightly after the etching. The inset shows the well-aligned array before ITO etching. The shiny dots and disk are gold markers for pattern alignment for electron beam lithography. b, A PMMA piece with the microdrones attached on the top. A zoom to the area indicated by the dashed rectangle is shown in the inset (same for c and d as well). It is seen that the microdrone array is right-left flipped as compared to a. c, A PVA piece with the microdrones attached on the top. The microdrone array is flipped again as compared to b. d, The microdrones are transferred to water. The water droplet has a volume of about 2.5 µL and is sandwiched between two glass coverslips with a spacer of PDMS (165 μm thick). Now the microdrones are seen as the swarm of dark dots. The air bubble to the right will disappear with time.
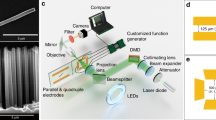
Extended Data Fig. 4 Schematic of the optical setup.
The inset to the left sketches the fact that both laser beams are focused by the lens to the back focal plane (BFP) of the top objective (for polarized light) to create unfocused light fields. Both 830 and 980 nm laser beams pass a polarizer (horizontal direction) positioned directly behind the laser diodes. The two light beams are overlapping after the dichroic mirror LP 900 nm. The polarization compensator is used to correct the influence of the dichroic mirror LP 900 nm to the linear polarization of the 980 nm beam. The components and the water cell are not to scale.
Supplementary information
Supplementary Information
Supplementary Figs. 1–5, Notes 1–3 and Videos 1–5.
Supplementary Video 1
Effect of the torque resulting from the transfer of the spin angular momentum of photons. Two types of microdrone with two identical motors are excited in the same light field of 830 nm. The two microdrones differ in the orientation of the motors, such that the two torque components on the right side of equation (1) have the same sign for one microdrone but have opposite signs for the other. As a result, the former microdrone rotates in the same direction as the circular polarization (orange arrow) with a higher speed, while the latter microdrone rotates in the direction opposite to the circular polarization with a slower speed.
Supplementary Video 2
Brownian motion of the microdrones inside the water cell after release when there is no driving light.
Supplementary Video 3
Actuation of two-motor microdrones. The original video has a frame rate of 100 fps, but is slowed down to 30 fps here. The parameters at the top are updated every six frames. The changing colour of the trajectories represents the progressing time. The positions of the motors (red points) are determined by fitting each of their images in the movie frames (dark spots) with a 2D elliptical Gaussian function. The centre of the microdrone and the orientation angles (yaw, pitch and roll) are extracted from the fitted motor coordinates.
Supplementary Video 4
Actuation of four-motor microdrones. The original video has a frame rate of 100 fps, but is slowed down to 30 fps here. The parameters at the top are updated every six frames. The changing colour of the trajectories represents the progressing time. The positions of the motors (red points) are determined by fitting each of their images in the movie frames (dark spots) with a 2D elliptical Gaussian function. The centre of the microdrone and the orientation angles (yaw, pitch and roll) are extracted from the fitted motor coordinates.
Supplementary Video 5
Continuous actuation of a four-motor microdrone in all three independent degrees of freedom.
Source data
Source Data Fig. 5
Statistical source data.
Rights and permissions
About this article

Cite this article
Wu, X., Ehehalt, R., Razinskas, G. et al. Light-driven microdrones. Nat. Nanotechnol. 17, 477–484 (2022). https://doi.org/10.1038/s41565-022-01099-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/s41565-022-01099-z
This article is cited by
-
A magnetically powered nanomachine with a DNA clutch
Nature Nanotechnology (2024)
-
Lightweight and drift-free magnetically actuated millirobots via asymmetric laser-induced graphene
Nature Communications (2024)
-
Opto-fluidically multiplexed assembly and micro-robotics
Light: Science & Applications (2024)
-
Switchable photothermal conversion efficiency for reprogrammable actuation
npj Flexible Electronics (2023)
-
Creating tunable lateral optical forces through multipolar interplay in single nanowires
Nature Communications (2023)
