
Abstract
Little seems to be considered about the globally exponentially asymptotical stability of parabolic type equilibria and the existence of heteroclinic orbits in the Lorenz-like system with high-order nonlinear terms. To achieve this target, by adding the nonlinear terms yz and \(x^{2}y\) to the second equation of the system, this paper introduces the new 3D cubic Lorenz-like system: \(\dot{x}=a(y - x)\), \(\dot{y}=b_{1}y+b_{2}yz+b_{3}xz+b_{4}x^{2}y\), \(\dot{z}= -cz + y^{2}\), which does not belong to the generalized Lorenz systems family. In addition to giving rise to generic and degenerate pitchfork bifurcation, Hopf bifurcation, hidden Lorenz-like attractors, singularly degenerate heteroclinic cycles with nearby chaotic attractors, etc., one still rigorously proves that not only the parabolic type equilibria \(S_{x} = \{(x, x, \frac{x^{2}}{c})|x\in \mathbb {R}, c\ne 0\}\) are globally exponentially asymptotically stable, but also there exists a pair of symmetrical heteroclinic orbits with respect to the z-axis, as most other Lorenz-like systems. This study may offer new insights into revealing some other novel dynamic characteristics of the Lorenz-like system family.
Similar content being viewed by others

Introduction
In 1963, the introduction of the Lorenz attractor1,2,3 motivated scholars to reveal the forming mechanism of it and other various strange attractors2,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22. Based on boundary problem and contraction map, Shilnikov et al.23 developed an effective tool to study the existence of homoclinic and heteroclinic orbits. When detecting homoclinic and heteroclinic trajectories of Lorenz-like systems, by aid of Lyapunov function, Leonov24 formulated another effective method, i.e., fishing principle, which also was applied to solve the Tricomi problem25. Recently, Belykh et al.19 pioneered a new way and developed an elegant geometrical method of synthesizing a piecewise-smooth ODE system that can switch between several linear systems with known exact solutions that can display a resembling the celebrated Lorenz attractor whose structure and bifurcations can be described rigorously without any computer assistance. Moreover, Belykh et al.20 performed a rigorous analysis of its homoclinic bifurcations that the emergence of sliding motions leads to novel bifurcation scenarios in which bifurcations of unstable homoclinic orbits of a saddle can yield stable limit cycles, which are in sharp contrast with their smooth analogs that can generate only unstable (saddle) dynamics. In addition, Gonchenko et al.21,22 studied geometrical and dynamical properties of the discrete Lorenz-like attractors and conjoined Lorenz twins in three-dimensional maps and flows. In contrast to self-excited Lorenz-like attractors, some hidden ones were coined in the Lorenz-like systems12,13,14. Meanwhile, Zhang and Chen15, and Kuznetsov et al.26 generalized the second part of the celebrated Hilbert’s 16th problem27 on the number and mutual disposition of attractors and repellers in the chaotic multidimensional dynamical systems, and, in particular, their dependence on the degree of polynomials in the model. From the point of view of boundedness and Lyapunov exponents, Liao et al.28,29 argued that the former attracts trajectories of the studied system with the way from outside to inside, and the latter pushes the trajectories with the way from inside to outside, which are two basic sufficient conditions that guarantee the studied continuous system to exhibit chaotic motions.
With the presence of powerful computational tools, scientists shifted to computer-assisted proof for the Lorenz attractor30,31,32. Dated back to 1999, based on the Lorenz system and the method of chaotification, Chen and Ueta7 reported the finding of a new chaotic attractor in a new system, i.e., the Chen attractor. Following this thought, many researchers later proposed many other systems which exhibit various strange attractors, the Lü attractor8, Li attractor9, Rabinovich attractor10, Wang-Chen attractor11, Sprott attractor17, and others2,18,19,20,21,22. Among these chaotic systems, a large number of systems2,14,18,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48 related to the Lorenz system, i.e., Lorenz-like/type systems, have been intensively studied by researchers, which in turn might account for revealing the nature of the Lorenz system itself. For example, the broken version of coexisting pseudo and true singularly degenerate heteroclinic cycles, or explosion version of normally hyperbolic stable foci could create most of the Lorenz-like attractors, i.e., two-, three-, four-wing/scroll self-excited or hidden chaotic/hyperchaotic attractors14,18,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48, shedding light on the forming mechanism of chaos.
In 2006, Li et al. formulated a method for proving the existence of heteroclinic orbits to the origin and two nontrivial equilibria of the Chen system, i.e., combining Lyapunov function, the definitions of both \(\alpha \)-limit set and \(\omega \)-limit set49. Later on, other researchers14,37,38,42,43,47,48,50,51,52,53,54,55,56,57,58,59,60 applied it to other Lorenz-like systems one after another, which thus can be considered as a general dynamical property for the Lorenz system family. However, we find that this method is not applicable to the simple Lorenz-like system (1). Fortunately, performing a similar study as the method of chaotification and introducing the nonlinear terms yz and \(x^{2}y\) to the second equation of it, we introduce a new 3D cubic Lorenz-like system, i.e., the one (2), and present its following dynamical properties:
-
(1)
The parabolic type equilibria are globally exponentially asymptotically stable.
-
(2)
The existence of a pair of heteroclinic orbits to the origin and a pair of symmetrical equilibria.
Our study outcome not only uncovers the interesting dynamics of the cubic Lorenz-like system family, but also provides a reference on predicting the similar dynamical behaviors of other models, especially the higher dimensional ones.
Therefore, in the ongoing pursuit to determine which experimental conditions may require a more complicated model, the present work may offer characteristics of that 3D cubic Lorenz-like system which may be suitable for comparison with experimental data.
The rest of this paper is arranged as follows. Section "Preliminary" introduces some basic concepts. In Section "The new 3D cubic Lorenz-like system", one formulates a new 3D cubic Lorenz-like system and presents some basic dynamical properties of it, i.e., the Chen-like attractor and Lyapunov exponents, bifurcation analysis, singularly degenerate heteroclinic cycles or normally hyperbolic stable foci with nearby chaotic attractors. Section "Basic behaviors" studies the stability and bifurcation of equilibria by utilizing the center manifold theorem, Routh-Hurwitz criterion, the theory of pitchfork bifurcation, Hopf bifurcation and Lyapunov function. In Section "Existence of heteroclinic orbit", combining concepts of \(\alpha \)-limit set, \(\omega \)-limit set and the theory of Lyapunov function, one proves the existence of heteroclinic orbits. Conclusion remarks are drawn in Section "Conclusions".
Preliminary
Consider the differential system \(\varvec{\dot{x} = f(x, \xi )},\) where \(\textbf{x}\in \mathbb {R}^{n}\) and \(\mathbf {\xi } \in \mathbb {R}^{m}\) are vectors representing phase variables and control parameters respectively. Assume that \(\textbf{f}\) is of class \(C^{\infty }\) in \(\mathbb {R}^{n}\times \mathbb {R}^{m}\). Suppose that system has an equilibrium point \(\mathbf {x=x_{0}}\) at \(\mathbf {\xi =\xi _{0}}\). If at least one eigenvalue of the Jacobian matrix associated with linearized vector field about \(x_{0}\) is zero or has a zero real part, then \(x_{0}\) is said to be non-hyperbolic or semi-hyperbolic.
In this paper, system (2) has a line of semi-hyperbolic equilibria \(S_{z} = \{(0, 0, z)|z\in \mathbb {R}\}\), given by the z-axis. As the value of z varies, \(S_{z}\) are saddles, or foci or nodes normally hyperbolic to the z-axis.
In this paper, we define the set \(S_{x} = \{(x, x, \frac{x^{2}}{c})|x\in \mathbb {R}, c\ne 0\}\) to the parabolic type equilibria.
Referring to61, the generic pitchfork bifurcation is that the restriction of a system to the center manifold is locally topologically equivalent near the bifurcating equilibrium point to one of the following normal forms, \(\dot{\xi } = m \xi \pm \xi ^{3}\). As stated in18,47,48,51,52,62,63, for system (2), the degenerate pitchfork bifurcation is defined to be the symmetric bifurcation occurring as the certain parameter crosses the zero value, i.e., \(c = 0\), due to the line of equilibria existing for \(c = 0\). The main difference between the generic and degenerate pitchfork bifurcation is that, for \(c = 0\), the flow of the studied system restricted to the 1D center manifold coincides with the center manifold of the system at the origin, associated with the invariant z-axis, which is filled by equilibrium points if \(c = 0\).
Let the set of points: S (either connected or disconnected) be equilibria of \(\varvec{\dot{x} = f(x, \xi )}\) and \(D\subset \mathbb {R}^{n}\) to be a domain containing S. Let \(V: D\rightarrow \mathbb {R}\) be a continuously differentiable function such that \(V(S)=0\) and \(V(x)>0\) in \(D \backslash S\), \(\dot{V}(x)\le 0\) in D. The derivative of V(x) along the trajectories of \(\varvec{\dot{x} = f(x, \xi )}\), denoted by \(\dot{V}(x)\), is given by \(\dot{V}(x)=\Sigma _{i=1}^{n}\frac{\partial V}{\partial x_{i}}\dot{x}_{i}=\Sigma _{i=1}^{n}\frac{\partial V}{\partial x_{i}}f_{i}(x)\). Then, S is stable. If \(\dot{V}(x) < 0\) in \(D \backslash S\), then S is asymptotically stable. Moreover, if \(D=\mathbb {R}^{n}\), then S is globally asymptotically stable. In addition, \(\forall \varepsilon > 0\), \(V_{0}=V(t_{0})\), if \(V \le V_{0}e^{-2\varepsilon (t-t_{0})}\rightarrow 0, \quad t \rightarrow + \infty \), then S is globally exponentially asymptotically stable.
The new 3D cubic Lorenz-like system
Based on the Lorenz-like system1:
one in this section proposes the following 3D autonomous chaotic system:
where \(a, c, b_{i} \in \mathbb {R}\), \(i=1, 2, 3, 4\).
Remark 3.1
Referring to1, the results on stability and Hopf bifurcation of \(P_{\pm }=(\pm \sqrt{bc},\pm \sqrt{bc},c)\) of system (1) are erroneous. To this end, we firstly derive the right result by Routh-Hurwitz criterion and Projection Method. Secondly, that system undergoes Bautin bifurcation (generalized or degenerate Hopf bifurcation) at \(P_{\pm }\) when parameters a, b, c satisfy the golden proportion \(a = \frac{1+\sqrt{5}}{2}c\), \(b = \frac{-1+\sqrt{5}}{2}c\). Finally, a hidden Lorenz-like attractor coexisting with one saddle in the origin and two stable equilibria is coined based on bifurcation diagrams. The manuscript has been uploaded to the web site: “https://github.com/IjbcThree/Kim”, and the interested readers can download it.
Set \(\textbf{X} = (x, y, z)^{T}\), system (2) is rewritten as
Apparently, system (2) is not topologically equivalent to the generalized Lorenz systems family2, and it shows a Chen-like attractor with three Lyapunov exponents: \((\lambda _{LE_{1}},\lambda _{LE_{2}},\lambda _{LE_{3}})=(0.271306,0.000084,\) \(-1.203645)\) when \((a,b_{1},b_{2},b_{3},b_{4},c) = (3,2.5,-7,-100,8,0.3)\) and \((x_{0}^{1}, y_{0}^{1}, z_{0}^{1})=(0.1382, 0.1618, 0)\times 1e^{-7}\), as depicted in Fig. 1.
Furthermore, the chaotic dynamics are examined in the following two cases:
(1) \((a,b_{2},b_{3},b_{4},c) = (3,-7,-50,8,0.3)\), \(b_{1}\in [0, 4]\)
In this case, based on Proposition 4.1 and 4.7 in Section "Basic behaviors", the equilibria \(S_{\pm }\) exist and are stable for \(b_{1}\in (0,1.2210)\). This coincides well with the bifurcation diagram in Fig. 2a. In particular, at \(b_{1}=1\), trajectories of system (2) change from the stable \(S_{+}\) to the stable \(S_{-}\), which is a sign to chaos as the ones14,38, especially the hidden one illustrated in Fig. 3. Particularly, when \(1.180\le b_{1}<1.2210\), there exist chaotic attractors coexisting with stable \(S_{\pm }\) and the saddle \(S_{0}\). While \(1.2210<b_{1}<2.869\), system (2) experiences chaotic behaviors coexisting with unstable \(S_{\pm }\) and the saddle \(S_{0}\). But there are periodic three windows in the chaotic band for \(1.576<b_{1}<1.98\). When \(2.869<b_{1}<4\), there is a period-doubling bifurcation window, which is an important route to chaos and is also similar to its special case [1, Figure 4, p.1888].
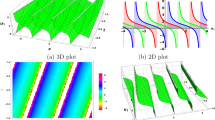
(2) \((a,b_{1},b_{2},b_{3},b_{4}) = (3,2.5,-7,-100,8)\), \(c\in [0, 2]\)
At this time, from Proposition 4.1, 4.2 and 4.7 in Sectipn "Basic behaviors", the non-isolated or line of semi-hyperbolic equilibria \(S_{z}\) exist for \(c=0\), and the equilibria \(S_{\pm }\) also exist and are stable for \(c\in (3.0234,10.8865)\). For \(c=0\), singularly degenerate heteroclinic cycles and normally hyperbolic stable foci \(S_{z}\) with nearby chaotic attractors exist, as shown in Fig. 2b, which is in accordance with Figs. 4 and 5, despite a little bit on the parameters \(b_{3}\) and \(b_{4}\). When \(0<c<0.6\), system (2) undergoes chaotic behaviors coexisting with unstable \(S_{\pm }\) and the saddle \(S_{0}\). While \(0.6<c<0.2\), there is a period-doubling bifurcation window, foreboding a coming chaos.
Remark 3.2
In contrast with other Lorenz-like systems12,13,14,51 and system (1) i.e., a special case of system (2), it is a difficult task to detect the hidden Lorenz-like attractors in system (2), which might contribute to the power of nonlinear terms and the number of parameters.

Phase portrait and Lyapunov exponents of system (2) with \((a,b_{1},b_{2},b_{3},b_{4},c) = (3,2.5,-7,-100,8,0.3)\) and \((x_{0}^{1}, y_{0}^{1}, z_{0}^{1})=(0.1382, 0.1618, 0)\times 1e^{-7}\).

Bifurcation diagrams of system (2) with (a) \((a,b_{2},b_{3},b_{4},c) = (3,-7,-50,8,0.3)\), \(b_{1}\in [0, 4]\) and (b) \((a,b_{1},b_{2},b_{3},b_{4}) = (3,2.5,-7,-100,8)\), \(c\in [0, 2]\), and initial value \((x_{0}^{1}, y_{0}^{1}, z_{0}^{1})=(0.1382, 0.1618, 0)\times 1e^{-7}\).

(a) The hidden attractor with \((a,b_{1},b_{2},b_{3},b_{4},c)=(3,1.179,-7,-50,8,0.3)\) and initial conditions \((\pm 0.05, \pm 0.03, 0.03)\), (b) Lyapunov exponents. Outgoing separatrices of unstable zero equilibrium \(S_{0}\) with initial conditions \((x_{0}^{1,2}, y_{0}^{1,2}, z_{0}^{1})=(\pm 0.1382, \pm 0.1618, 0)\times 1e^{-7}\) tend to two symmetric stable equilibria \(S_{\pm }=(\pm 0.0805,\pm 0.0805,0.0216)\).
Further, based on the dynamics of \(S_{z}\) in Proposition 4.4 in Section "Existence of heteroclinic orbit" and through a detailed numerical study, we may state the following numerical result.
\(\mathbf {Numerical\quad Result \,3.1}\) If \(c=0\) and \(a[b_{1}+(b_{2}+b_{3})z_{1}] > 0\) for \(z_{1}\in \mathbb {R}\), then the 1D unstable manifolds \(W^{u}(S_{z}^{1})\) (\(S_{z}^{1}=(0, 0, z_{1})\)) of each normally hyperbolic saddle \(S_{z}^{1}\) given in Proposition 4.4 tend to one of the normally hyperbolic stable nodes (resp. foci) \(S_{z}^{2}=(0, 0, z_{2})\) as \(t\rightarrow \infty \), where \(z_{2}\) satisfies \(b_{1}+b_{2}z_{2}-a < 0\), \(a[b_{1}+(b_{2}+b_{3})z_{2}] < 0\) and \((\tau _{1})^{2} + 4\rho _{1} = (a-b_{1}-b_{2}z)^{2} + 4a[b_{1}+(b_{2}+b_{3})z] \ge 0\) (resp. \(<0\)), which together with the line of equilibria between \(S_{z}^{1}\) and \(S_{z}^{2}\) forms singularly degenerate heteroclinic cycles. With a small perturbation of \(c>0\), the broken version of singularly degenerate heteroclinic cycles, or explosions of normally hyperbolic stable nodes or foci creates chaotic attractors.
Take, for instance, \((a,b_{1},b_{2},b_{3},b_{4},c)=(3,2.5, -7, -138,9,0)\) and \((x_{0}^{1,2}, y_{0}^{1,2})=(\pm 1.382, \pm 1.618)\times 10^{-6}\), \(z_{0}^{2,1,3,4,5,6,7,8,9} = -0.05, 0, 0.01,0.01701,0.01715,0.01719, 0.0173, 0.02, 0.035\). At this time, the dynamics of \(S_{z}\) are included in Table 1 when the value of z varies.
The 1D \(W^{u}(S_{z}^{1,2,3})\) (resp. \(W^{u}(S_{z}^{4,5,6})\)) of normally hyperbolic saddles \(S_{z}^{2,1,3}=\) \((0,0,-0.05)\), (0, 0, 0), (0, 0, 0.01) (resp. \(S_{z}^{4,5,6}=\) (0, 0, 0.01701), (0, 0, 0.01715), (0, 0, 0.01719)) tend upward the normally hyperbolic stable foci (0, 0, 0.3814), (0, 0, 0.0839) and (0, 0, 0.0375) (resp. nodes (0, 0, 0.0175), (0, 0, 0.01734) and (0, 0, 0.01729)) in \(S_{z}\) as \(t\rightarrow \infty \), forming singularly degenerate heteroclinic cycles, which further also collapse into Chen-like attractor depicted in Figs. 4, 5 and 7 when \(c = 0.08\). Moreover, as shown in Fig. 6, explosions of normally hyperbolic stable foci (0, 0, 0.0173), (0, 0, 0.02) and (0, 0, 0.035) also create Chen-like attractors. Figures 4, 5 and 6 only depict some of them. The existence of infinitely many \(S_{z}\) given in Proposition 4.3 suggests that there exists an infinite set of singularly degenerate heteroclinic cycles and normally hyperbolic stable nodes and foci.
Remark 3.3
Set \((a,b_{1},b_{2},b_{3},b_{4},c)=(3,2.5, -7, -138,9,0)\).
(1) If \(z < 0.01701\), the trajectories of system (2) starting from the unstable manifold of \(S_{z} = (0, 0, z)\) ultimately toward the normally hyperbolic stable foci \(S_{z}\) with \(z > 0.0175\), forming singularly degenerate heteroclinic cycles, as depicted in Figs. 4a and 8.
(2) If \(0.01701 \le z < 0.0172\), the trajectories of system (2) starting from the unstable manifold of \(S_{z} = (0, 0, z)\) ultimately toward the normally hyperbolic stable nodes \(S_{z}\) with \(0.0172 < z \le 0.0175\), forming singularly degenerate heteroclinic cycles, as depicted in Figs. 5a and 8.
(3) If \(z > 0.0172\), all of \(S_{z} = (0, 0, z)\) are normally hyperbolic stable nodes or node-foci, as shown in Figs. 6a and 8.

Chen-like attractor created through collapse of singularly degenerate heteroclinic cycles consisting of normally hyperbolic saddles \(S_{z}^{1,2,3}\) and normally hyperbolic stable foci (0, 0, 0.3814), (0, 0, 0.0839) and (0, 0, 0.0375) when \((a,b_{1},b_{2},b_{3},b_{4},c)=(3,2.5, -7, -138,9,0)\) and \((x_{0}^{1,2}, y_{0}^{1,2})=(\pm 1.382, \pm 1.618)\times 10^{-6}\), \(z_{0}^{2,1,3} = -0.05, 0, 0.01\).

Chen-like attractor created through collapse of singularly degenerate heteroclinic cycles consisting of normally hyperbolic saddles \(S_{z}^{4,5,6}\) and normally hyperbolic stable nodes (0, 0, 0.0175), (0, 0, 0.01734) and (0, 0, 0.01729) when \((a,b_{1},b_{2},b_{3},b_{4},c)=(3,2.5, -7, -138,9,0)\) and \((x_{0}^{1,2}, y_{0}^{1,2})=(\pm 1.382, \pm 1.618)\times 10^{-6}\), \(z_{0}^{4,5,6} = 0.01701,0.01715,0.01719\).

Chen-like attractor created through explosions of normally hyperbolic stable foci when \((a,b_{1},b_{2},b_{3},b_{4})=(3,2.5, -7, -138,9)\) \((x_{0}^{1,2}, y_{0}^{1,2})=(\pm 1.382, \pm 1.618)\times 10^{-6}\), \(z_{0}^{7,8,9}=0.0173, 0.02, 0.035\).

Lyapunov exponents of the bifurcated Chen-like attractor when \((a,b_{1},b_{2},b_{3},b_{4},c)=(3,2.5, -7, -138,9,0.08)\).

Bifurcation diagrams of the system (2) with \((a,b_{1},b_{2},b_{3},b_{4},c)=(3,2.5, -7, -138,9,0)\) and \((x_{0}^{1}, y_{0}^{1})=(1.382, 1.618)\times 10^{-6}\) and (a) \(z_{0}\in [-1.5, 1]\), (b) \(z_{0}\in [0.004,0.02]\).
Basic behaviors
In this section, the stability and bifurcation of equilibria of system (2) are studied by aid of the center manifold theorem, Routh-Hurwitz criterion, the theory of pitchfork bifurcation and Hopf bifurcation, Lyapunov function and so on.
Firstly, from the algebraic structure of system (2), one easily presents the distribution of equilibrium points in the following proposition.
Proposition 4.1
(i) When \(c = 0\), \(S_{z} = \{(0, 0, z)|z\in \mathbb {R}\}\) is a line of semi-hyperbolic equilibria of system (2).
(ii) When \(b_{1} = 0\), \(c \ne 0\) and \(cb_{4}+b_{3}+b_{2}=0\), \(S_{x} = \{(x, x, \frac{x^{2}}{c})|x\in \mathbb {R}, c\ne 0\}\) is the parabolic type equilibria.
(iii) While \(cb_{1}[cb_{4}+b_{3}+b_{2}] < 0\), system (2) has three equilibria: \(S_{0} = (0, 0, 0)\) and a pair of symmetrical equilibria
Secondly, for the convenience of determining the stability and bifurcation of equilibria, one has to calculate Jacobian matrix associated vector field of system (2):
One can easily calculate the characteristic equations of points of \(S_{z}\), \(S_{0}\), \(S_{x}\) and \(S_{\pm }\):
-
(1)
The one of each of \(S_{z}\) is
$$\begin{aligned} \lambda [\lambda ^{2}-(b_{1}+b_{2}z-a)\lambda -a(b_{1}+(b_{2}+b_{3})z)]=0 \end{aligned}$$with \(\lambda _{1}=0\), \(\lambda _{2,3} = \frac{(b_{1}+b_{2}z-a)\pm \sqrt{(b_{1}+b_{2}z-a)^{2}+4a(b_{1}+(b_{2}+b_{3})z)}}{2}\).
-
(2)
The one of \(S_{0}\) is
$$\begin{aligned} (\lambda +a)(\lambda -b_{1})(\lambda +c)=0 \end{aligned}$$with \(\lambda _{1}=-a\), \(\lambda _{2} = b_{1}\) and \(\lambda _{3}=-c\).
-
(3)
For \(b_{1} = 0\), \(c \ne 0\) and \(cb_{4}+b_{3}+b_{2}=0\), the one of each of \(S_{x}\) is
$$\begin{aligned} \lambda [\lambda ^{2}+(a+c+\frac{b_{3}x^{2}}{c})\lambda +ac+x^{2}(b_{3}+2cb_{4})]=0 \end{aligned}$$with \(\lambda _{1}=0\), \(\lambda _{2,3} = \frac{-(a+c+\frac{b_{3}x^{2}}{c})\pm \sqrt{(a+c+\frac{b_{3}x^{2}}{c})^{2}-4x^{2}(ac+b_{3}+2cb_{4})}}{2}\).
-
(4)
The one of \(S_{\pm }\) is:
$$\begin{aligned} \begin{array}{l} \lambda ^{3}+(a+c-\frac{b_{1}b_{3}}{cb_{4}+b_{3}+b_{2}})\lambda ^{2}+c(a+\frac{b_{1}(2b_{2}+b_{3}+2ab_{4})}{cb_{4}+b_{3}+b_{2}})\lambda +2acb_{1}=0. \end{array} \end{aligned}$$(4)
Proposition 4.2
(1) A generic pitchfork bifurcation happens at \(S_{0}\) when \(b_{1}\) crosses the null value and \(cb_{1}(cb_{4}+b_{3}+b_{2}) < 0\). (2) If c passes through the null value and \(cb_{1}(cb_{4}+b_{3}+b_{2}) < 0\), then system (2) undergoes a degenerate pitchfork bifurcation at \(S_{z}\).
Proof
(1) Assume \(c(cb_{4}+b_{3}+b_{2}) \ne 0\), \(c \ne 0\) and \(b_{1} = 0\). The matrix associated with the vector field (2) linearized about \(S_{0}\) has the eigenvalues: \(\lambda _{1} = -a\), \(\lambda _{2} = b_{1}=0\) and \(\lambda _{3} = -c\) with the corresponding eigenvectors
Set \(\bar{b}_{1} = b_{1} - 0\). System (2) becomes
Next, the following transformation
converts system (5) into
Based on the center manifold theorem, one can study the two-parameter family of first-order ordinary differential equations on the center manifold of \(S_{0}\):
to determine the stability of \(S_{0}\) near \(\bar{b}_{1} = 0\).
Therefore, one arrives at
through substituting the expanded expressions of \(V(u, \bar{b}_{1})\) and \(S(u, \bar{b}_{1})\):
into system (6).
Further, the restricted vector field of system (6) on its center manifold
is obtained by substituting those expressions in (7) into system (6).
Since \(U(0, 0) = 0, \quad \frac{\partial {U}}{\partial {u}}\big |_{u=0, \bar{b}_{1}=0} = 0\) and
a generic pitchfork bifurcation happens at \(S_{0}\) according to the pitchfork bifurcation theory23,64,65,66.
(2) When the parameter c crosses the zero value, the family of this vector field crosses this degenerate situation transversally. More precisely speaking, for \(cb_{1}[cb_{4}+b_{3}+b_{2}] < 0\), the line of equilibria \(S_{z}\) existing for \(c=0\) disappears and equilibria \(S_{0}\) and \(S_{\pm }\) appear in system (2).
The proof is over. \(\square \)
Proposition 4.3
Assume \(a > 0\), \(b_{1} > 0\) and \(c > 0\). The saddle \(S_{0}\) has a 1D \(W_{loc}^{u}(S_{0})\) that is locally characterized by
and a 2D \(W_{loc}^{s}(S_{0})\) containing the z-axis.
Proof
The proof is similar to the ones in37,52,54,56. One only sketches it. For \(a > 0\), \(b_{1} > 0\) and \(c > 0\), the eigenvalues of \(S_{0}\) are \(\lambda _{1} = -a < 0\), \(\lambda _{2} = b_{1}>0\) and \(\lambda _{3} = -c<0\). Thus \(S_{0}\) has a 2D \(W_{loc}^{s}\) containing z–axis, and 1D \(W^{u}_{loc}(S_{0})\) whose appropriate expression is
with \(A_{1}=\left( \begin{array}{cc} -a &{} a\\ 0&{} b_{1} \end{array}\right) . \) Assuming that \(y=H(x)=H_{1}x+H_{2}x^2+O(x^3)\) and \(z=K(x)=K_{1}x+K_{2}x^2+O(x^3)\), and substituting them into system (2), one obtains the following first-order differential equation \(K'(x)[a(H(x)-x)] = -cK(x)+(H(x))^{2},\) and
In addition, the matrix equation \(\left( \begin{array}{cc}-a&{}a\\ 0&{}b_{1}\end{array}\right) \left( \begin{array}{c}1\\ H'(0)\end{array}\right) =\lambda _{2}\left( \begin{array}{c}1\\ H'(0)\end{array}\right) \) suggests \(H_{1}=H'(0)=\frac{a+b_{1}}{a}\). Hence, from Eq. (10), one has \(K_{1}=0\), \(H_{2}=0\) and \(K_{2} = \frac{(a+b_{1})^{2}}{2b_{1}a^{2}}\). The proposition is thus proved. \(\square \)
Proposition 4.4
(1) When \(c=0\), \(a,b_{1},b_{2},b_{3},b_{4}, z\in \mathbb {R}\), the local dynamical behaviors of \(S_{z}\) are totally summarized in Table 2, where \(\rho _{1} = a[b_{1}+(b_{2}+b_{3})z]\), \(\tau _{1} = -(a-b_{1}-b_{2}z)\), and \(\sigma _{1} = (\tau _{1})^{2} + 4\rho _{1} = (a-b_{1}-b_{2}z)^{2} + 4a[b_{1}+(b_{2}+b_{3})z]\). While \(b_{1} = 0\), \(c \ne 0\), \(cb_{4}+b_{3}+b_{2}=0\) and \(z\in \mathbb {R}\), Table 3 lists the local dynamics of \(S_{x}\), where \(\rho _{2} = ac+x^{2}(b_{3}+2cb_{4})\), \(\tau _{2} = -[a+c+\frac{b_{3}x^{2}}{c}]\), and \(\sigma _{2} = (\tau _{2})^{2} - 4\rho _{2} = (a+c+\frac{b_{3}x^{2}}{c})^{2} - 4[ac+x^{2}(b_{3}+2cb_{4})]\).
(2) Moreover, for \(c = 2a > 0\), \(b_{1} = b_{3} = 0\) and \(b_{2} = -cb_{4} < 0\), each point of \(S_{x}\) is globally exponentially asymptotically stable.
Proof
(1) Firstly, the local stability of points of \(S_{z}\) and \(S_{x}\) easily follows from the linear analysis and is omitted here.
(2) Secondly, we discuss the global stability of points of \(S_{x}\), i.e., each point of \(S_{x}\) is globally exponentially asymptotically stable. For \(c = 2a > 0\), \(b_{1} = b_{3} = 0\) and \(b_{2} = -cb_{4} < 0\), set the following Lyapunov function:
with
which yields
Namely, points of \(S_{x}\) are globally exponentially asymptotically stable. The proof is finished. \(\square \)
Remark 4.5
In contrast with other Lorenz-like systems14,37,38,42,43,47,48,49,50,51,52,53,54,55,56,57,58,59,60 and the special case of system (2), it follows from Proposition 4.4 that system (1) has no globally exponentially asymptotically stable parabolic type equilibria.
Proposition 4.6
(1) If \(a<0\) or \(b_{1}>0\) or \(c<0\), then \(S_{0}\) is unstable. If \(a>0\), \(b_{1}<0\) and \(c>0\), then \(S_{0}\) is stable.
(2) If \(c=0\), then the dynamics of \(S_{0}\) are the same to the ones of \(S_{z}\) with \(z=0\) and listed in Table 2.
Proof
The local stability of \(S_{0}\) easily follows from the linear analysis and is omitted here. \(\square \)
Proposition 4.7
Denote \(W=\{(a,b_{1},b_{2},b_{3},b_{4},c)\in \mathbb {R}^{6}|a>0, cb_{1}[cb_{4}+b_{3}+b_{2}] < 0\}\), \(W_{2}=W\backslash W_{1}\), \( W_{1}=\{(a,b_{1},b_{2},b_{3},b_{4},c)\in W: a+c-\frac{b_{1}b_{3}}{cb_{4}+b_{3}+b_{2}}>0, c(a+\frac{b_{1}(2b_{2}+b_{3}+2ab_{4})}{cb_{4}+b_{3}+b_{2}})>0, 2acb_{1}>0\} \).
where \(\Gamma = c[(a+c-\frac{b_{1}b_{3}}{cb_{4}+b_{3}+b_{2}})(a+\frac{b_{1}(2b_{2}+b_{3}+2ab_{4})}{cb_{4}+b_{3}+b_{2}})-2ab_{1}]\). \(S_{\pm }\) are unstable when \((a,b_{1},b_{2},b_{3},b_{4},c)\in W_{1}^{1}\cup W_{2}\) whereas \(S_{\pm }\) are asymptotically stable when \((a,b_{1},b_{2},b_{3},b_{4},c)\in W_{1}^{3}\). When \((a,b_{1},b_{2},b_{3},b_{4},c)\in W_{1}^{2}\), system (2) undergoes Hopf bifurcation at \(S_{\pm }\) respectively.
Proof
According to Routh-Hurwitz criterion and Eq. (4), \(S_{\pm }\) are unstable when \((a,b_{1},b_{2},b_{3},b_{4},c)\in W_{1}^{1}\cup W_{2}\) whereas \(S_{\pm }\) are asymptotically stable when \((a,b_{1},b_{2},b_{3},b_{4},c)\in W_{1}^{3}\).
While \((a,b_{1},b_{2},b_{3},b_{4},c)\in W_{1}^{2}\), Eq. (4) has one negative real root \(\lambda _{1} = -(a+c-\frac{b_{1}^{*}b_{3}}{cb_{4}+b_{3}+b_{2}}) < 0\) and a pair of conjugate purely imaginary roots \(\lambda _{2, 3}=\pm \omega i\), where \(\omega =\sqrt{c(a+\frac{b_{1}^{*}(2b_{2}+b_{3}+2ab_{4})}{cb_{4}+b_{3}+b_{2}})}\) and \(b_{1}^{*}\) satisfies \((a+c-\frac{b_{1}^{*}b_{3}}{cb_{4}+b_{3}+b_{2}})(a+\frac{b_{1}^{*}(2b_{2}+b_{3}+2ab_{4})}{cb_{4}+b_{3}+b_{2}})-2ab_{1}^{*}=0\). Then calculating the derivatives on both sides of Eq. (4) with respect to the parameter \(b_{1}\) and substituting \(\lambda _{2}\) and \(b_{1}\) with \(\omega i\) and \(b_{1}^{*}\) into the derivative yield
Hence, the transversal condition holds. So, the Hopf bifurcations happen at \(S_{\pm }\). Figure 9 illustrates that the numerical simulation agrees with the theoretical analysis. The proof is finished. \(\square \)

Hopf bifurcations at \(S_{\pm }\) for system (2) when \((a,b_{1},b_{2},b_{3},b_{4},c)=(3,9.3563, -7, -1,1,7)\) and \((x_{0}^{3,4}, y_{0}^{3,4}, z_{0}^{10})=(\pm 7.8, \pm 7.8, 8.2)\).
In the following Section "Conclusions", one studies the existence of heteroclinic orbits of system (2). For the convenience of discussion in the sequel, the following notations are introduced.
Denote by \(\phi _{t}(q_{0}) = (x(t; x_{0}), y(t; y_{0}), z(t; z_{0}))\) a solution of system (2) with the initial condition \(q_{0} = (x_{0}, y_{0}, z_{0})\). Let \(\gamma ^{+}\) (resp. \(\gamma ^{-}\)) be the positive (resp. negative) branch of the unstable manifold \(W^{u}(S_{0})\) corresponding to \(x_{+} > 0\) (resp. \(x_{+} < 0\)) for large negative t, i.e., \(\gamma ^{\pm } =\{\phi _{t}^{\pm }(q_{0})|\phi _{t}^{\pm }(q_{0})=(\pm x_{+}(t; x_{0}), \pm y_{+}(t; y_{0}), z_{+}(t; z_{0}))\in W_{\pm }^{u}, t\in \mathbb {R}\}\).
Existence of heteroclinic orbit
Combining the Lyapunov function, concepts of both \(\alpha \)-limit set and \(\omega \)-limit set14,37,38,42,43,47,48,49,50,51,52,53,54,55,56,57,58,59,60, one in this section rigorously proves the existence of a pair of heteroclinic orbits of system (2). Firstly, the unstable manifold of \(S_{0}\) has been characterized in Proposition 4.3.
Secondly, set the Lyapunov function \(\begin{array}{ll} V(\phi _{t}(q_{0}))=V(x, y, z) =&ac(c-2a)b_{4}(y - x)^{2}+a(c-2a)b_{4}^{2}(-cz+x^{2})^{2} + \frac{1}{2} [-b_{4}(c-2a)x^{2} + cb_{1}]^{2}. \end{array} \)
Proceeding as in14,37,38,42,43,47,48,50,51,52,53,54,55,56,57,58,59,60, one formulates the following result.
Proposition 5.1
When \(c - 2a > 0\), \(0< b_{1} < a\), \(b_{4} > 0\), \(b_{2} = -cb_{4}\) and \(b_{3} = -(c - 2a)b_{4}\), one derives the following assertions.
-
(i)
If there exist \(t_{1}\) and \(t_{2}\) such that \(t_{1} < t_{2}\) and \(V(\phi _{t_{1}}(q_{0})) = V(\phi _{t_{2}}(q_{0})) \), then \(q_{0}\) is one of equilibria of system (2).
-
(ii)
If \(\phi _{t}(q_{0})\rightarrow S_{0}\) as \(t\rightarrow -\infty \), and \(x(t; x_{0}) > 0\) for some \(t\in \mathbb {R}\), then \(V(S_{0}) > V(\phi _{t}(q_{0}))\) and \(x(t; x_{0}) > 0\) for all \(t\in \mathbb {R}\). Consequently, \(q_{0}\in \gamma ^{+}\).
Proof
i) For \(c - 2a > 0\), \(0< b_{1} < a\), \(b_{4} > 0\), \(b_{2} = -cb_{4}\) and \(b_{3} = -(c - 2a)b_{4}\), one can compute the derivative of \(V(\phi _{t}(q_{0}))\) along the solution \(\phi _{t}(q_{0})\):
So, for all \(t\in (t_{1}, t_{2})\), the condition (i) implies
In virtue of system (2), \(\dot{x}(t; x_{0}) = a(y - x) = 0\) suggests \(x(t) = x_{0}\) and \(\dot{y}(t; y_{0}) = 0\), \(\forall t \in \mathbb {R}\). \(-cz+x^{2}=0\) implies \(-cz+y^{2}=0\) for all \(t \in \mathbb {R}\), i.e. \(\dot{z}(t; z_{0}) = 0\). In a word, \(q_{0}\) is one of equilibria, i.e.
ii) Firstly, one proves \(V(S_{0}) > V(\phi _{t}(q_{0}))\), \(\forall t \in \mathbb {R}\). Otherwise, suppose \(0 < V(S_{0}) \le V(\phi _{t_{0}}(q_{0}))\) for at least a \(t_{0}\in \mathbb {R}\). This also yields that \(q_{0}\) is one of equilibria of system (2), which leads to \(q_{0} = S_{0}\) and \(x(t; x_{0})=0\), \(\forall t \in \mathbb {R}\) according to \(\lim _{t\rightarrow -\infty }\phi _{t}(q_{0}) = S_{0}\). A contradiction occurs! Therefore, \(V(S_{0}) > V(\phi _{t}(q_{0}))\), for all \(t \in \mathbb {R}\).
Next, one proves \(x(t; x_{0}) > 0\), \(\forall t\in \mathbb {R}\). Assume by contrary that \(x(t^{'}; x_{0}) \le 0\) for some \(t^{'} \in \mathbb {R}\). From the hypothesis of (ii), there exists a \(\tau \in \mathbb {R}\) such that \(x(\tau , x_{0}) = 0\). Since \(V(S_{0}) > V(\phi _{t}(q_{0}))\), \(\forall t \in \mathbb {R}\), one has \(\phi _{\tau }(q_{0})\in \{(x, y, z): V(S_{0}) > V(x, y, z)\} \cap \{(0, y, z)\}=\{(x, y, z): ac(c-2a)b_{4}y^{2}+a(c-2a)b_{4}^{2}c^{2}z^{2} + \frac{1}{2}c^{2}b_{1}^{2}<\frac{1}{2}c^{2}b_{1}^{2}\}=\varnothing \), which is a contradiction. Hence, it follows that \(x(t; x_{0}) > 0\), \(\forall t \in \mathbb {R}\). The proof of the proposition is finished. \(\square \)
Based on Proposition 5.1, the existence of heteroclinic orbits to \(S_{0}\) and \(S_{\pm }\) is derived in the following statement.
Proposition 5.2
Consider \(c - 2a > 0\), \(0< b_{1} < a\), \(b_{4} > 0\), \(b_{2} = -cb_{4}\) and \(b_{3} = -(c - 2a)b_{4}\). One has the statements as follows.
-
(a)
Neither homoclinic orbits nor heteroclinic orbits to \(S_{+}\) and \(S_{-}\) exist in system (2).
-
(b)
System (2) has a pair of symmetrical heteroclinic orbits to \(S_{0}\) and \(S_{\pm }\).
Proof
a) Firstly, one proves that neither heteroclinic orbits nor homoclinic orbits to \(S_{+}\) and \(S_{-}\) exist in system (2). Assume by contrary that \(\phi _{t}(q_{0})\) is a heteroclinic orbit or a homoclinic orbit to \(S_{+}\) and \(S_{-}\), i.e.
where \(s_{-}\) and \(s_{+}\) satisfy either \(\{s_{-}, s_{+}\}=\{S_{-},S_{+}\}\) or \(s_{-}=s_{+}\in \{S_{0}, S_{-}, S_{+}\}\). From Eq. (13), one arrives at \(V(s_{-}) \ge V(\phi _{t}(q_{0})) \ge V(s_{+})\) and thus \(V(s_{-}) = V(s_{+})\) in either case, which also yields \(V(\phi _{t}(q_{0}))= V(s_{+})\). According to Proposition 5.1(i), \(q_{0}\) is one of equilibria. Therefore, system (2) has neither heteroclinic orbits nor homoclinic orbits joining \(S_{+}\) and \(S_{-}\).
b) Next, one proves that there exists a single heteroclinic orbit joining \(S_{0}\) and \(S_{+}\): \(\gamma ^{+}(t)\). As \(t \rightarrow \infty \), it follows Proposition 4.2 that \(\phi _{t}(q_{0})\) approaches neither \(S_{0}\) nor \(S_{-}\). Hence, \(\lim _{t \rightarrow \infty }\phi _{t}(q_{0}) = S_{+}\).
Finally, let us show that if system (2) has a second heteroclinic orbit to \(S_{0}\) and \(S_{+}\), then it coincides with \(\gamma ^{+}\).
Suppose \(\phi _{t}^{1}(q_{0})\) is a solution of system (2) that
where \(s_{-}^{1}\) and \(s_{+}^{1}\) satisfy \(\{s_{-}^{1}, s_{+}^{1}\}=\{S_{0},S_{+}\}\). Since V is decreasing, one has \(V(s_{-}^{1}) \ge V(\phi _{t}^{1}(q_{0})) \ge V(s_{+}^{1})\) and \(V(S_{0}) > V(S_{+})\). Therefore, one obtains \(s_{-}^{1}=S_{0}\) and \(s_{+}^{1}=S_{+}\), i.e.,
It follows from Proposition 5.1(ii) that \(\phi _{t}^{1}(q_{0}) = \gamma ^{+}\).
Since system (2) is symmetrical with respect to the z-axis, \(\gamma ^{-}\) is another unique heteroclinic orbit to \(S_{0}\) and \(S_{-}\). Figure 10 verifies the correctness of the theoretical result. Thus proof is completed. \(\square \)

Heteroclinic orbits to \(S_{0}\) and \(S_{\pm }\) of system (2) for \((a,b_{1},b_{2},b_{3},b_{4},c)=(3,2.5, -7, -1,1,7)\) and initial values \((x_{0}^{',''}, y_{0}^{',''}, z_{0}^{',''})=(\pm 1.382\times 1e^{-6}, \pm \frac{5.5}{3}\times 1.382\times 1e^{-6}, \frac{6.05}{9}\times 1.382\times 1.382\times 1e^{-12})\) on the unstable manifolds of \(S_{0}\), i.e., the \(W^{u}_{loc}(S_{0})\) characterized in Proposition 4.3.
Remark 5.3
It follows from Proposition 5.2 that the special case of system (2), i.e., the one (1) has not heteroclinic orbits to \(S_{0}\) and \(S_{\pm }\) for \(b_{2} = b_{4} = 0\). How to prove the existence of heteroclinic orbits of system (1) will be our future work, if they exist. Compared with other Lorenz-like systems14,37,38,42,43,47,48,50,51,52,53,54,55,56,57,58,59,60, it is more difficult to construct the Lyapunov function for system (2) with more nonlinear terms.
Conclusions
This note reports a new 3D cubic Lorenz-like system, which contains the existing one as special cases and generates rich dynamics, such as generic and degenerate pitchfork bifurcation, Hopf bifurcation, infinitely many singularly degenerate heteroclinic cycles with nearby Chen-like attractors, etc. Using Lyapunov functions, we prove that the parabolic type equilibria are globally exponentially asymptotically stable, and there exists a pair of heteroclinic orbits to the origin and two symmetrical equilibria.
In future work, other important dynamics of that system, such as homoclinic orbit, invariant algebraic surface, positively invariant set, the forming mechanism of chaotic attractor and so on, require further analytical descriptions to complete its mathematical treatment. We also hope that the basic ideas and the self-contained approach presented in this paper can be applied to explore other similar chaotic/hyperchaotic systems, i.e.,
where \(a \ne 0\), \(c, b_{i}, p_{1}, p_{1}, p_{2}, q_{1}, q_{2}, q_{3} \in \mathbb {R}\), \(i=1, 2, 3, 4\), etc. Preliminary studies show that there might exist chaotic/hyperchaotic attractors, generic and degenerate pitchfork bifurcation, Hopf bifurcation, singularly degenerate heteroclinic cycles, globally exponentially asymptotically stable parabolic type equilibria, a pair of heteroclinic orbits to the origin and two symmetrical equilibria in system (16–18). We also guess that the dynamics also exist in higher dimensional analogues.
Data availability
All data generated or analyzed during this study are included in this published article.
References
Kim, D., Chang, P. & Kim, S. A new chaotic attractor and its robust function projective synchronization. Nonlinear Dyn. 73, 1883–1893 (2013).
G. Chen, Generalized Lorenz systems family, https://arxiv.org/abs/2006.04066, (2020).
Lorenz, E. N. Deterministic nonperiodic flow. J. Atmos. Sci. 20, 130–141 (1963).
Rikitake, T. Oscillations of a system of disk dynamos. Proc. Camb. Phil. Soc. 54, 89–105 (1958).
Shimizu, T. & Morioka, N. On the bifurcation of a symmetric limit cycle to an asymmetric one in a simple model. Phys. Lett. A 76, 201–204 (1980).
Bragin, V., Vagaitsev, V., Kuznetsov, N. & Leonov, G. Algorithms for finding hidden oscillations in nonlinear systems. The Aizerman and Kalman conjectures and Chua’s circuits. J. Comput. Syst. Sci. Int. 50, 511–543 (2011).
Chen, G. & Ueta, T. Yet another chaotic attractor. Int. J. Bifurc. Chaos 9, 1465–1466 (1999).
Lü, J. & Chen, G. A new chaotic attractor coined. Int. J. Bifurc. Chaos 12, 659–661 (2002).
Li, D. A three-scroll chaotic attractor. Phys. Lett. A 372, 387–393 (2008).
Llibre, J., Messias, M. & Silva, P. R. On the global dynamics of the Rabinovich system. J. Phys. A Math. Theor. 41, 275210-1–21 (2008).
Wang, X. & Chen, G. A chaotic system with only one stable equilibrium. Commun. Nonlinear Sci. Numer. Simulat. 17, 1264–1272 (2012).
Leonov, G. A., Kuznetsov, N. V. & Mokaev, T. N. Homoclinic orbits, and self-excited and hidden attractors in a Lorenz-like system describing convective fluid motion. Eur. Phys. J. Spec. Topics 224, 1421–1458 (2015).
Kuznetsov, N. V., Leonov, G. A., Mokaev, T. N., Prasad, A. & Shrimali, M. D. Finite-time Lyapunov dimension and hidden attractor of the Rabinovich system. Nonlinear Dyn. 92, 267–285 (2018).
Wang, H., Ke, G., Pan, J., Hu, F. & Fan, H. Multitudinous potential hidden Lorenz-like attractors coined. Eur. Phys. J. Spec. Top. 231, 359–368 (2022).
Zhang, X. & Chen, G. Constructing an autonomous system with infinitely many chaotic attractors. Chaos 27, 071101-1–5 (2017).
Yang, Y., Huang, L., Xiang, J., Bao, H. & Li, H. Design of multi-wing 3D chaotic systems with only stable equilibria or no equilibrium point using rotation symmetry. Int. J. Electron. Commun. 135, 153710-1–10 (2021).
Sprott, J. C. Do we need more chaos examples?. Chaos Theory Appl. 2, 1–2 (2020).
Wang, H., Fan, H. & Pan, J. A true three-scroll chaotic attractor coined. Discret. Contin. Dyn. Syst. Ser. B 27, 2891–2915 (2022).
Belykh, Vladimir N., Barabash, Nikita V. & Belykh, Igor V. A Lorenz-type attractor in a piecewise-smooth system: Rigorous results. Chaos 29, 103108-1–17 (2019).
Belykh, Vladimir N., Barabash, Nikita V. & Belykh, Igor V. Sliding homoclinic bifurcations in a Lorenz-type system: Analytic proofs. Chaos 31, 043117-1–17 (2021).
Gonchenko, Sergey, Gonchenko, Alexander, Kazakov, Alexey & Samylina, Evgeniya. On discrete Lorenz-like attractors. Chaos 31, 023117-1–20 (2021).
Gonchenko, Sergey, Karatetskaia, Efrosiniia, Kazakov, Alexey & Kruglov, Vyacheslav. Conjoined Lorenz twins-a new pseudohyperbolic attractor in three-dimensional maps and flows. Chaos 32, 121107-1–13 (2022).
Shilnikov, L. P., Shilnikov, A. L., Turaev, D. V. & Chua, L. O. Methods of Qualitative Theory in Nonlinear Dynamics. Part II (World Scientific, 2001).
Leonov, G. A. Fishing principle for homoclinic and heteroclinic trajectories. Nonlinear Dyn. 78, 2751–2758 (2014).
Leonov, G. A. The Tricomi problem for the Shimizu-Morioka dynamical system. Dokl. Math. 86, 850–853 (2012).
Kuznetsov, N. V., Mokaev, T. N., Kuznetsova, O. A. & Kudryashova, E. V. The Lorenz system: Hidden boundary of practical stability and the Lyapunov dimension. Nonlinear Dyn. 102, 713–732 (2020).
Hilbert, D. Mathematical problems. Bull. Am. Math. Soc. 8, 437–479 (1902).
Liao, X., Yu, P., Xie, S. & Fu, Y. Study on the global property of the smooth Chua’s system. Int. J. Bifurc. Chaos 16, 2815–2841 (2006).
Liao, X. New Research on Some Mathematical Problems of Lorenz Chaotic Family (in Chinese) (Huazhong University of Science & Technology Press, 2017).
Viana, M. What’s new on Lorenz strange attractors?. Math. Intell. 22, 6–19 (2000).
Stewart, I. Mathematics: The Lorenz attractor exists. Nature 406, 948–949 (2000).
Tucker, W. The Lorenz attractor exists. Comptes Rendus lAcad. Sci. Ser. I Math. 328, 1197–1202 (1999).
Kokubu, H. & Roussarie, R. Existence of a singularly degenerate heteroclinic cycle in the Lorenz system and its dynamical consequences: Part I. J. Dyn. Differ. Equ. 16, 513–557 (2004).
Messias, M. Dynamics at infinity and the existence of singularly degenerate heteroclinic cycles in the Lorenz system. J. Phys. A Math. Theor. 42, 115101-1–18 (2009).
Dias, F. S., Mello, L. F. & Zhang, J. Nonlinear analysis in a Lorenz-like system. Nonl. Anal. RWA 11(5), 3491–3500 (2010).
Yang, Q. & Chen, Y. Complex dynamics in the unified Lorenz-type system. Int. J. Bifurc. Chaos 24(10), 14500133 (2014).
Wang, H. & Li, X. More dynamical properties revealed from a 3D Lorenz-like system. Int. J. Bifurc. Chaos 24, 1450129 (2014).
Wang, H. & Li, X. On singular orbits and a given conjecture for a 3D Lorenz-like system. Nonlinear Dyn. 80, 969–981 (2015).
Chen, Y. & Yang, Q. A new Lorenz-type hyperchaotic system with a curve of equilibrium. Math. Comput. Simul. 112, 40–55 (2015).
Li, X., Li, C. & Wang, H. Complex dynamics of a simple 3D autonomous chaotic system with four-wing. J. Appl. Anal. Comput. 7, 745–769 (2017).
Chen, Y. Dynamics of a Lorenz-type multistable hyperchaotic system. Math. Methods Appl. Sci. 41, 1–12 (2018).
Wang, H. & Li, X. Hopf Bifurcation and new singular orbits coined in a Lorenz-like system. J. Appl. Anal. Comput. 8, 1037–1025 (2018).
Wang, H. & Li, X. A novel hyperchaotic system with infinitely many heteroclinic orbits coined. Chaos Solitons Fractals 106, 5–15 (2018).
Wang, H. & Dong, G. New dynamics coined in a 4-D quadratic autonomous hyper-chaotic system. Appl. Math. Comput. 346, 272–286 (2019).
Wang, H. On singular orbits and global exponential attractive set of a Lorenz-type system. Int. J. Bifurc. Chaos 29(6), 195008211 (2019).
Chen, H., Liu, Y., Feng, C., Liu, A. & Huang, X. Dynamics at infinity and existence of singularly degenerate heteroclinic cycles in Maxwell-Bloch system. J. Comput. Nonlin. Dyn. 15, 101007-1–8 (2020).
Wang, H. & Zhang, F. Bifurcations, ultimate boundedness and singular orbits in a unified hyperchaotic Lorenz-type system. Discret. Contin. Dyn. Syst. Ser. B 25, 1791–1820 (2020).
Wang, H., Fan, H. & Pan, J. Complex dynamics of a four-dimensional circuit system. Int. J. Bifurc. Chaos 31, 2150208-1–31 (2021).
Li, T., Chen, G. & Chen, G. On homoclinic and heteroclinic orbits of the Chen’s system. Int. J. Bifurc. Chaos 16, 3035–3041 (2006).
Tigan, G. & Constantinescu, D. Heteroclinic orbits in the \(\mathit{T}\) and the Lü system. Chaos Solitons Fractals 42, 20–23 (2009).
Liu, Y. & Yang, Q. Dynamics of a new Lorenz-like chaotic system. Nonl. Anal. RWA 11, 2563–2572 (2010).
Li, X. & Wang, H. Homoclinic and heteroclinic orbits and bifurcations of a new Lorenz-type system. Int. J. Bifurc. Chaos 21, 2695–2712 (2011).
Liu, Y. & Pang, W. Dynamics of the general Lorenz family. Nonlinear Dyn. 67, 1595–1611 (2012).
Li, X. & Ou, Q. Dynamical properties and simulation of a new Lorenz-like chaotic system. Nonlinear Dyn. 65, 255–270 (2011).
Li, X. & Wang, P. Hopf bifurcation and heteroclinic orbit in a 3D autonomous chaotic system. Nonlinear Dyn. 73, 621–632 (2013).
Chen, Y. & Yang, Q. Dynamics of a hyperchaotic Lorenz-type system. Nonlinear Dyn. 77, 569–581 (2014).
Tigan, G. & Llibre, J. Heteroclinic, homoclinic and closed orbits in the Chen system. Int. J. Bifurc. Chaos 26, 1650072-1–6 (2016).
Wang, H., Li, C. & Li, X. New heteroclinic orbits coined. Int. J. Bifurc. Chaos 26, 165019413 (2016).
Wang, H. & Li, X. Infinitely many heteroclinic orbits of a complex Lorenz system. Int. J. Bifurc. Chaos 27, 1750110-1–14 (2017).
Li, X. & Wang, H. A three-dimensional nonlinear system with a single heteroclinic trajectory. J. Appl. Anal. Comput. 10, 249–266 (2020).
Kuzenetsov, Y. A. Elements of Applied Bifurcation Theory 3rd edn, Vol. 112 (Springer-Verlag, New York, 2004).
Mello, L. F., Messias, M. & Braga, D. C. Bifurcation analysis of a new Lorenz-like chaotic system. Chaos Solitons Fractals 37, 1244–1255 (2008).
Rubinger, R. M., Nascimento, A. W. M., Mello, L. F., Rubinger, C. P. L. & Albuquerque, H. A. Inductorless Chua’s circuit: Experimental time series analysis. Math. Problems Eng. 2007, 083893 (2007).
Guckenheimer, J. & Holmes, P. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields 3rd edn. (Springer, 1983).
Wiggins, S. Introduction to Applied Nonlinear Dynamical System and Chaos (Springer, 2003).
Strogatz, S. H. Nonlinear Dynamics and Chaos: with Applications to Physics, Biology, Chemistry, and Engineering (Perseus Books, 2014).
Acknowledgements
This work is supported in part National Natural Science Foundation of China under Grant 12001489, in part Natural Science Foundation of Zhejiang Guangsha Vocational and Technical University of construction under Grant 2022KYQD-KGY, in part Zhejiang public welfare Technology Application Research Project of China under Grant LGN21F020003, in part Natural Science Foundation of Taizhou University under Grant T20210906033, in part NSF of Zhejiang Province under Grant LQ18A010001. At the same time, the authors wish to express their sincere thanks to the anonymous editors and reviewers for their conscientious reading and numerous valuable comments which extremely improve the presentation of this paper.
Author information
Authors and Affiliations
Contributions
H.W.: Conceptualization, software, writing—original draft, visualization, investigation. G.K.: Supervision, software, methodology, investigation, visualization. J.P.: Software, visualization, validation, writing—review & editing. Q.S.: Validation, writing—review & editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, H., Ke, G., Pan, J. et al. Modeling, dynamical analysis and numerical simulation of a new 3D cubic Lorenz-like system. Sci Rep 13, 6671 (2023). https://doi.org/10.1038/s41598-023-33826-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-33826-4
This article is cited by
-
Hierarchical Gradient-Based Iterative Parameter Estimation Algorithms for a Nonlinear Feedback System Based on the Hierarchical Identification Principle
Circuits, Systems, and Signal Processing (2024)
-
Parameter Estimation for Nonlinear Functions Related to System Responses
International Journal of Control, Automation and Systems (2023)
-
Recursive estimation algorithms based on the least squares and their convergence for a class of time-varying systems
Nonlinear Dynamics (2023)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
