
Abstract
Utilizing nonlinear evolution equations (NEEs) is common practice to establish the fundamental assumptions underlying natural phenomena. This paper examines the weakly dispersed non-linear waves in mathematical physics represented by the Konopelchenko-Dubrovsky (KD) equations. The \((G^\prime /G^2)\)-expansion method is used to analyze the model under consideration. Using symbolic computations, the \((G^\prime /G^2)\)-expansion method is used to produce solitary waves and soliton solutions to the \((2+1)\)-dimensional KD model in terms of trigonometric, hyperbolic, and rational functions. Mathematica simulations are displayed using two, three, and density plots to demonstrate the obtained solitary wave solutions’ behavior. These proposed solutions have not been documented in the existing literature.
Similar content being viewed by others
Introduction
In the field of applied mathematics and physics, NEEs are of enormous importance. Since NEEs address a wide range of phenomena in optical fiber, nonlinear dynamics, fluid mechanics, engineering, plasma physics, and other fields, it is important to find their exact solutions. In addition to its theoretical significance, modeling plays a pivotal role with numerous applications, emerging as a key tool in understanding nonlinear evolution equations. It has evolved into a crucial domain of development, where the exchange and further advancement of various recent mathematical methods contribute to significant progress. The objective of this research is to showcase results and recent developments in the theory of evolution equations, encompassing both theoretical and practical aspects. Many researchers and mathematicians have suggested a variety of efficient methods1,2,3,4,5,6 for finding exact solutions of nonlinear (NPDEs), such as Hirota’s bilinear method7, tanh function method8, the inverse scattering technique9, the Bäcklund transformation method10, modified variational iteration method11, the multiple exp-function approaches12, the Darboux transformation approach13, the Lie symmetry analysis14,15,16, the \((G^\prime /G)\)-expansion approach17, the Kudryashov technique18 and the Jacobi elliptic technique19,20,21.
The \((G^\prime /G^2)\)-expansion method22 is a very efficient, reliable, and simple strategy for locating the numerous soliton-form solutions of various NPDEs. Our understanding and ability to forecast the appropriate structures of the related complex nonlinear systems are made possible by the dynamics of NPDEs. A solitary wave, also known as a soliton, is a particle-like object with finite energy and amplitude that maintains its shape during propagation and restores it after colliding with other solitons. Thus, determining the precise closed-form solutions of NPDEs is a very popular topic in today’s world. The wave-form solutions of such a type of NPDEs are highly advantageous in a variety of fields, including nonlinear sciences, applied mathematics, mathematical physics, engineering, plasma physics, nonlinear dynamics, and applied sciences. The following (2+1)-dimensional KD model will be examined in the present study.
where a, b are arbitrary real parameters, u and v are the dependent variables, and x, y, t are independent variables. This system represents the weakly dispersed non-linear waves in mathematical physics.
Several researchers have investigated the analytical solutions of the KD system using some effective methods. The (2+1)-dimensional KD equation23 was developed by Konopelchenko and Dubrovsky in 1984. Wazwaz24 documented solutions for this system using hyperbolic, trigonometric, and rational functions. These solutions were transformed into recognizable complex structures such as kinks, solitons, and periodic waves by assigning specific parameter values. Subsequently, Feng et al.25 employed the improved Riccati mapping method and the variable separation method to analyze solitary wave solutions, periodic waves, and variable-separation solutions using trigonometric, hyperbolic, and rational functions. Meanwhile, Kumar et al.26 utilized the Lie symmetry method to derive periodic waves, singular solutions, cnoidal, and snoidal waves. Ren et al.27 utilized the Mobius (conformal invariant form) and truncated Painleve approach to establish nonlocal symmetries. Meanwhile, Alfalqi et al.28 employed the B-spline approach and the modified simplest approach involving the KD equation. They outlined solutions, including shock waves, singular solutions, solitary waves, periodic singular waves, and plane waves based on rational, trigonometric, and hyperbolic functions. Khater et al.29 used a modified auxiliary equation method to establish analytical traveling wave solutions for this system, encompassing periodic waves, kinks, and solitary waves based on rational, trigonometric, and hyperbolic functions. In a recent approach, Kumar et al.30 applied the generalized exponential rational function method and dynamical system method to derive solutions for KD equations, yielding soliton solutions such as kink waves, periodic waves, and oscillating waves based on rational, trigonometric, and hyperbolic functions. In the aforementioned discussion, various approaches were employed to derive solutions for the KD system, yielding trigonometric, hyperbolic, and rational function solutions. Despite sharing the same foundational functions, these solutions exhibited distinct structures, each novel in comparison to the others. Motivated by this, we aim to introduce additional classes of solitary wave solutions for the KD system (1), still rooted in trigonometric, hyperbolic, and rational functions, but with unique structures not yet documented in the literature. This underscores the novelty of our findings.
In this article, the \((G^\prime /G^2)\)-expansion method22,31 is applied to investigate the (2+1)-dimensional KD model (1). The primary goal is to generate reliable solitary waves and soliton solutions for the KD system (1). The analytical findings are presented in the form of trigonometric, hyperbolic, and rational functions. Additionally, the development of the solitary wave structure is demonstrated through specific soliton-form solutions in two- and three-dimensional graphics, as well as density graphics in Mathematica simulations. The results suggest that the derived exact closed-form solutions exhibit highly impressive and beneficial evolutionary profile dynamics. Notably, the discovered soliton solutions are entirely novel and have not been reported in previous findings.
The structure of this article follows the following plan: The \((G^\prime /G^2)\)-expansion method is explained in Section “Introduction to the \((G^\prime /G^2)\)-expansion method”, which deals with its introduction. Section “Application of the \((G^\prime /G^2)\)-expansion method to \((2+1)\)-d KD model” provides the exact traveling wave solution to the KD equations. The dynamics of the wave patterns of the obtained closed-form soliton solutions of the KD equations are covered in Section “Graphical interpretation of some solutions”. In the end, a conclusion is provided.
Introduction to the \((G^\prime /G^2)\)-expansion method
In this section, we give a general overview of ansatz that is utilized to compute the traveling wave structures of some nonlinear equations. Here are the main steps for the ansatz of \((G^\prime /G^2)\)-expansion method22,31.
Step 1. Consider a general system of NPDEs (with two dependent variables and three independent variables) as
where u, v are unknown functions of independent variables \(x,\,y,\,t\).
Step 2. We apply the following transformation
to convert (2) into a system of nonlinear ordinary differential equations (NLODES)
After some mathematical calculations system (4) is converted into a single NLODE
where \((')\) indicates the differentiation w.r.t. \(\xi\).
Step 3. We assume that a polynomial in \(\left( \frac{G^\prime }{G^2}\right)\) can be used to express the solution of (5) as follows
where the straightforward Riccati equation is satisfied by \(G=G(\xi )\)
In the above equation unknown constants \(d_{0}\), \(d_{n}\), \(d_{-n}\) \((n=1,2,\ldots ,M)\) must be found where \(\eta \ne 1\) and \(\psi \ne 0\) are arbitrary integers.
The three possibilities for the promising solution of \((G^\prime /G^2)\) are listed below;
Case-i: Trigonometric type solutions
If we have \(\eta \psi >0\), then (7) gives
Case-ii: Hyperbolic type solutions
When we have \(\eta \psi <0\), then (7) gives
Case-iii: Rational type solutions
When we have \(\eta =0\), \(\psi \ne 0\) then from (7) rational function solution can be written as
where in all above cases \(E_1\) and \(E_2\) are constants. In the next section we apply the introduced method.
Application of the \((G^\prime /G^2)\)-expansion method to \((2+1)\)-d KD model
The transformations \(u(x,y,t)=U(\zeta )\) and \(v(x,y,t)=V(\zeta )\), where \(\zeta =\alpha x+\beta y-\mu t\) in Eq. (1), lead to the NLODE system presented below.
The first equation is integrated, and the result is
By incorporating it into the second equation of the NLODEs system and ignoring the integration constant, the following NLODE is produced as
By applying the balancing principle to the Eq. (9), we get at \(M + 2 = 3M\), which results in \(M = 1\). Using (6) for \(M=1\) formula, we arrive at the trial solution presented as
where \(d_{0}\), \(d_{1}\) and \(d_{-1}\) are constants. On inserting (10) and its derivatives along with (7) into (9), we get a system of equations. We obtain the set of algebraic equations by setting the coefficients of powers of \((G^\prime /G^2)\) to zero
We obtain the following set of parameters by solving the aforementioned system using the computer program like Mathematica, Maple, or MATLAB.
Set-1
Set-2
Set-3
Set-4
Set-5
Set-6
Set-7
The three possibilities for the promising solution of \((G^\prime /G^2)\) from Set-1 are listed below;
Case-i: Trigonometric type solutions
If we have \(\eta \psi >0\), then (7) gives
Case-ii: Hyperbolic type solutions
If we have \(\eta \psi <0\), then (7) gives
Case-iii: Rational type solutions
If we have \(\eta =0\), \(\psi \ne 0\) then from (7) rational solution can be written as
where \(E_1\) and \(E_2\) are real parameters.
By back substituting the values in (10), we get the solutions of the system (1) in the form;
Family-1: Trigonometric type solutions
If we have \(\eta \psi >0\), then
Family-2: Hyperbolic type solutions
If we have \(\eta \psi <0\), then
Family-3: Rational type solutions
If we have \(\eta =0\), \(\psi \ne 0\) then rational function solution is given as
By substituting the values of \({\textbf {Set-2}}\) in (10), we get the solutions of the system (1) in the form;
Family-4: Trigonometric type solutions
If we have \(\eta \psi >0\), then
Family-5: Hyperbolic type solutions
If we have \(\eta \psi <0\), then
Family-6: Rational type solutions
If we have \(\eta =0\), \(\psi \ne 0\) then rational function solution is given as
By substituting the values of \({\textbf {Set-3}}\) in (10), we get the solutions of the system (1) in the form;
Family-7: Trigonometric type solutions
If we have \(\eta \psi >0\), then
Family-8: Hyperbolic type solutions
If we have \(\eta \psi <0\), then
Family-9: Rational type solutions
If we have \(\eta =0\), \(\psi \ne 0\) then rational function solution is given as
By substituting the values of \({\textbf {Set-4}}\) in (10), we get the solutions of the system (1) in the form;
Family-10: Trigonometric type solutions
If we have \(\eta \psi >0\), then
Family-11: Hyperbolic type solutions
When we have \(\eta \psi <0\), then
Family-12: Rational type solutions
If we have \(\eta =0\), \(\psi \ne 0\) then rational function solution is given as
By substituting the values of \({\textbf {Set-5}}\) in (10), we get the solutions of the system (1) in the form;
Family-13: Trigonometric type solutions
When we have \(\eta \psi >0\), then
Family-14: Hyperbolic type solutions
When we have \(\eta \psi <0\), then
Family-15: Rational type solutions
When we have \(\eta =0\), \(\psi \ne 0\) then rational function solution is given as
By substituting the values of \({\textbf {Set-6}}\) in (10), we get the solutions of the system (1) in the form;
Family-16: Trigonometric type solutions
If we have \(\eta \psi >0\), then
Family-17: Hyperbolic type solutions
When we have \(\eta \psi <0\), then
Family-18: Rational type solutions
If we have \(\eta =0\), \(\psi \ne 0\) then rational function solution is given as
By substituting the values of \({\textbf {Set-7}}\) in (10), we get the solutions of the system (1) in the form;
Family-19: Trigonometric type solutions
If we have \(\eta \psi >0\), then
Family-20: Hyperbolic type solutions
When we have \(\eta \psi <0\), then
Family-21: Rational type solutions
If we have \(\eta =0\), \(\psi \ne 0\) then rational function solution is given as
where in all above families \(\zeta =\alpha x+\beta y-\mu t\) and \(E_1,\,\, E_2\) are constants.
Graphical interpretation of some solutions
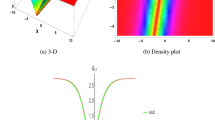
We can demonstrate the graphical representation of the wave solution profile of various solution surfaces in this section. Using symbolic computations, the \((G^\prime /G^2)\)-expansion is used to produce waveform soliton solutions to the \((2+1)\)-dimensional KD model in terms of trigonometric, hyperbolic, and rational function solutions. Figures 1, 2, 3 and 4 show the periodic waves as well as solitary wave solutions for the KD system (1). An essential set of parameters that are mentioned with each case are included in each plot.

The nature of solitary wave solution (22) obtained by fixing all parameters to 1.

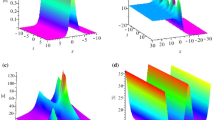
The nature of periodic waves (25) obtained by fixing all parameters to 1.

The nature of solitary wave solution (29) obtained by fixing all parameters to 1.

The wave nature of rational polynomial solution (33) obtained by fixing all parameters to 1.
Discussion and conclusions
It is common practice to utilize NEEs to establish the fundamental assumptions underlying natural phenomena. In this paper, the weakly dispersed non-linear waves in mathematical physics were represented by the KD equations. The \((G^\prime /G^2)\)-expansion method was used to analyze the model under consideration. Several researchers have obtained the analytical solutions of the KD system using hyperbolic, trigonometric, and rational functions. In summarizing previous work, Wazwaz24 reported the solutions, introducing kink, soliton, and periodic wave solutions. Subsequently, Feng et al.25 explored solitary wave, periodic wave, and variable-separation solutions. Concurrently, Kumar et al.26 derived periodic waves, singular solutions, cnoidal, and snoidal waves. Additionally, Alfalqi et al.28 outlined solutions, including shock waves, singular solutions, solitary waves, periodic singular waves, and plane waves. Khater et al.29 established periodic waves, kinks, and solitary waves. In an approach, Kumar et al.30 obtained soliton solutions such as kink waves, periodic waves, and oscillating waves. Although various approaches in the discussion produced trigonometric, hyperbolic, and rational function solutions with distinct structures, our approach also explored the same class of rational, hyperbolic, and trigonometric function-based solutions. Comparing results, we conclude that the literature has not featured any of our produced solutions. The obtained solitary wave families validate the method, showcasing applications in solitary wave theory, mathematical sciences, and nonlinear sciences. For future studies, we intend to investigate the KD system using the Jacobi elliptic function method to derive elliptic function-based solutions.
Data availability
All data generated or analyzed during this study are included in this published article [and its supplementary information files].
References
An, T., Shahen, N. H., Ananna, S. N., Hossain, M. F. & Muazu, T. Exact and explicit travelling-wave solutions to the family of new 3D fractional WBBM equations in mathematical physics. Results Phys. 19, 103517 (2020).
Shahen, N. H. & Rahman, M. M. Dispersive solitary wave structures with MI Analysis to the unidirectional DGH equation via the unified method. Partial Differ. Equ. Appl. Math. 6, 100444 (2022).
Usman, M., Hussain, A., Zaman, F. D. & Eldin, S. M. Group invariant solutions of wave propagation in phononic materials based on the reduced micromorphic model via optimal system of Lie subalgebra. Results Phys. 48, 106413 (2023).
Hussain, A., Kara, A. H. & Zaman, F. Symmetries, associated first integrals and successive reduction of Schrödinger type and other second order difference equations. Optik 171, 113423 (2023).
Hussain, A., Usman, M., Zaman, F. D. & Eldin, S. M. Double reductions and traveling wave structures of the generalized Pochhammer–Chree equation. Partial Differ. Equ. Appl. Math. 7, 100521 (2023).
Usman, M., Hussain, A. & Zaman, F. U. Invariance analysis of thermophoretic motion equation depicting the wrinkle propagation in substrate-supported Graphene sheets. Phys. Scr. 98(9), 095205 (2023).
Hirota, R. The Direct Method in Soliton Theory (Cambridge University Press, 2004).
Hussain, A., Kara, A. H. & Zaman, F. D. New exact solutions of the Thomas equation using symmetry transformations. Int. J. Appl. Comput. Math. 9(5), 106 (2023).
Wang, M. Solitary wave solutions for variant Boussinesq equations. Phys. Lett. A 199(3–4), 169–72 (1995).
Usman, M., Hussain, A., Zaman, F. D., Khan, I. & Eldin, S. M. Reciprocal Bäcklund transformations and traveling wave structures of some nonlinear pseudo-parabolic equations. Partial Differ. Equ. Appl. Math. 7, 100490 (2023).
Rehman, S., Hussain, A., Rahman, J. U., Anjum, N. & Munir, T. Modified Laplace based variational iteration method for the mechanical vibrations and its applications. Acta Mech. Autom. 16(2), 98–102 (2022).
Kumar, S. & Kumar, A. Lie symmetry reductions and group invariant solutions of (2+1)-dimensional modified Veronese web equation. Nonlinear Dyn. 98(3), 1891–903 (2019).
Guan, X., Liu, W., Zhou, Q. & Biswas, A. Darboux transformation and analytic solutions for a generalized super-NLS-mKdV equation. Nonlinear Dyn. 98, 1491–500 (2019).
Hussain, A., Kara, A. H. & Zaman, F. An invariance analysis of the Vakhnenko–Parkes equation. Chaos Solitons Fractals 171, 113423 (2023).
Hussain, A., Usman, M., Zaman, F. D. & Eldin, S. M. Symmetry analysis and invariant solutions of Riabouchinsky Proudman Johnson equation using optimal system of Lie subalgebras. Results Phys. 49, 106507 (2023).
Hussain, A., Usman, M., Zaman, F. D., Dawood, A. A. & Ibrahim, T. F. Symmetry analysis, closed-form invariant solutions and dynamical wave structures of the Benney Luke equation using optimal system of Lie subalgebras. Chin. J. Phys. 83(1), 1–13 (2023).
Malik, A., Chand, F., Kumar, H. & Mishra, S. C. Exact solutions of the Bogoyavlenskii equation using the multiple \((\frac{G^{\prime }}{G})\)-expansion method. Comput. Math. Appl. 64(9), 2850–9 (2012).
Kudryashov, N. A. Simplest equation method to look for exact solutions of nonlinear differential equations. Chaos Solitons Fractals 24(5), 1217–31 (2005).
Hussain, A., Usman, M., Zaman, F. D. & Eldin, S. M. Optical solitons with DNA dynamics arising in oscillator-chain of Peyrard–Bishop model. Results Phys. 50, 106586 (2023).
Hussain, A., Chahlaoui, Y., Zaman, F. D., Parveen, T. & Hassan, A. M. The Jacobi elliptic function method and its application for the stochastic NNV system. Alex. Eng. J. 81, 347–359 (2023).
Hussain, A., Chahlaoui, Y., Usman, M., Zaman, F. D. & Park, C. Optimal system and dynamics of optical soliton solutions for the Schamel KdV equation. Sci. Rep. 13(1), 15383 (2023).
Ali, M. N., Osman, M. S. & Husnine, S. M. On the analytical solutions of conformable time-fractional extended Zakharov–Kuznetsov equation through \((\frac{G^{\prime }}{G^2})\)-expansion method and the modified Kudryashov method. SeMA J. 76, 15–25 (2019).
Konopelchenko, B. G. & Dubrovsky, V. G. Some new integrable nonlinear evolution equations in (2+1) dimensions. Phys. Lett. A 102(1–2), 15–17 (1984).
Wazwaz, A. M. New kinks and solitons solutions to the (2+1)-dimensional Konopelchenko–Dubrovsky equation. Math. Comput. Model. 45(3–4), 473–9 (2007).
Feng, W. G. & Lin, C. Explicit exact solutions for the (2+1)-dimensional Konopelchenko–Dubrovsky equation. Appl. Math. Comput. 210(2), 298–302 (2009).
Kumar, S., Hama, A. & Biswas, A. Solutions of Konopelchenko–Dubrovsky equation by traveling wave hypothesis and Lie symmetry approach. Appl. Math. Inf. Sci. 8(4), 1533 (2014).
Ren, B., Cheng, X. P. & Lin, J. The (2+1)-dimensional Konopelchenko–Dubrovsky equation: Nonlocal symmetries and interaction solutions. Nonlinear Dyn. 86, 1855–62 (2016).
Alfalqi, S. H., Alzaidi, J. F., Lu, D. & Khater, M. On exact and approximate solutions of (2+1)-dimensional Konopelchenko–Dubrovsky equation via modified simplest equation and cubic B-spline schemes. Thermal Sci. 23(Suppl. 6), 1889–99 (2019).
Khater, M. M., Lu, D. & Attia, R. A. Lump soliton wave solutions for the (2+ 1)-dimensional Konopelchenko–Dubrovsky equation and KdV equation. Mod. Phys. Lett. B 33(18), 1950199 (2019).
Kumar, S., Mann, N. & Kharbanda, H. A Study of (2+ 1)-Dimensional Konopelchenko–Dubrovsky (KD) System: Closed-Form Solutions, Solitary Waves, Bifurcation Analysis and Quasi-Periodic Solution.
Bilal, M., Ur-Rehman, S. & Ahmad, J. Dynamics of diverse optical solitary wave solutions to the Biswas–Arshed equation in nonlinear optics. Int. J. Appl. Comput. Math. 8(3), 137 (2022).
Acknowledgements
The authors extend their appreciation to the Deanship for Scientific Research at King Khalid University for funding this work through Large groups (project under grant number RGP2/141/44).
Author information
Authors and Affiliations
Contributions
Writing original draft, A.H. and T.P.; Writing review and editing, A.H., T. P., B.A.Y. and H.U.M.A.; Methodology, A.H., T.F.I., M.S.; Software, A.H. and T.F.I.; Supervision, M.S.; Funding, M.S., T.F.I.; Visualization, A.H., T.P. and B.A.Y.; Conceptualization, A.H., T.P. and T.F.I.; Formal analysis, M.S. and A.H.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hussain, A., Parveen, T., Younis, B.A. et al. Dynamical behavior of solitons of the (2+1)-dimensional Konopelchenko Dubrovsky system. Sci Rep 14, 147 (2024). https://doi.org/10.1038/s41598-023-46593-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-46593-z
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
