
Abstract
This study focuses on the individual and joint contributions of two nonverbal channels (i.e., face and upper body) in avatar mediated-virtual environments. 140 dyads were randomly assigned to communicate with each other via platforms that differentially activated or deactivated facial and bodily nonverbal cues. The availability of facial expressions had a positive effect on interpersonal outcomes. More specifically, dyads that were able to see their partner’s facial movements mapped onto their avatars liked each other more, formed more accurate impressions about their partners, and described their interaction experiences more positively compared to those unable to see facial movements. However, the latter was only true when their partner’s bodily gestures were also available and not when only facial movements were available. Dyads showed greater nonverbal synchrony when they could see their partner’s bodily and facial movements. This study also employed machine learning to explore whether nonverbal cues could predict interpersonal attraction. These classifiers predicted high and low interpersonal attraction at an accuracy rate of 65%. These findings highlight the relative significance of facial cues compared to bodily cues on interpersonal outcomes in virtual environments and lend insight into the potential of automatically tracked nonverbal cues to predict interpersonal attitudes.
Similar content being viewed by others


Introduction
Nonverbal cues are often heralded as the main source of social information during conversations. Despite the many decades social scientists have studied gestures, however, there are only a handful of large sample studies in which the body movements of interactants are measured in detail over time and associated with various communication outcomes. Hence, this experiment capitalizes on dramatic advancements in virtual reality (VR) technology to track and quantify the facial expressions and body movements of over 200 people speaking to one another while embodied in an avatar.
Steuer1 defines VR as “a real or simulated environment in which a perceiver experiences telepresence.” Under this definition, VR includes immersive and non-immersive experiences involving technologies that contribute to feelings of vividness and interactivity, the two core dimensions of telepresence1. Multiple companies have launched avatar-mediated social VR platforms, which allow users to connect with others using customized avatars (i.e., digital representations of users controlled in real-time2) in virtual environments. One development that has made avatar-mediated communication particularly attractive has been the possibility to achieve unprecedented levels of behavioral realism3. Optical tracking systems (e.g., HTC Vive, Microsoft Kinect, Oculus Rift CV1) can measure users’ physical movements in real-time with great accuracy4 and render virtual representations accordingly. Although less common in consumer products, developments in computer vision allow for facial tracking through information extracted from RGB and/or infrared cameras. While facial tracking is yet to be widely available on social VR platforms, there has been a growing interest in developing technology that allows for a more seamless facial tracking experience5,6,7.
Despite the significant interest in adding nonverbal cues to VR, little is known about the impact of incorporating nonverbal channels in avatar-mediated environments. While current industrial trends appear to revolve around the belief that ‘more is better’, studies show that technical sophistication does not necessarily lead to more favorable outcomes8,9 Furthermore, considering that even minimal social cues are enough to elicit social responses10 and that verbal strategies are sufficient to communicate emotional valence11, it is unclear whether incorporating additional nonverbal cues will linearly improve communication outcomes.
Understanding the impact of facial expressions and bodily movements within avatar-mediated environments can help further our understanding of the significance of these channels in FtF contexts. While there are a handful studies that lend insight into the independent and joint contributions of various nonverbal channels during FtF interactions, the majority of these studies were either conducted with static images12,13 or posed expressions14,15,16, rather than FtF interactions. In addition, the limited number of studies that did study the impact of different nonverbal cues in FtF dyadic contexts asked participants to wear sunglasses17,18 or covered parts of their bodies19,20, which inevitably alters the appearance of the target individual and reduces both the ecological validity and generalizability of results. By using identical avatars across conditions and only allowing the nonverbal information to differ, the present study offers an ideal balance between experimental control and ecological validity3.
Behavioral realism and interpersonal outcomes
The extant literature offers a mixed picture regarding the relationship between nonverbal cues and interpersonal outcomes within avatar-mediated contexts. On the one hand, studies show that increasing behavioral realism can improve communication outcomes21,22. Moreover, past studies have demonstrated that increasing behavioral realism by augmenting social cues exhibited by avatars (e.g., eye gaze and facial expressions) can enhance collaboration and produce meaningful interactions23,24,25. It is important to note, however, that the nonverbal cues included in these studies often manipulated responsive behaviors (e.g., mutual gaze, nodding), which are associated with positive outcomes26,27. As such, it is uncertain if the purported benefits of behavioral realism were due to the addition of nonverbal cues or perceptions of favorable nonverbal behavior.
In contrast, other studies28,29 found that general levels of behavioral realism do not uniformly improve communication outcomes. For instance, two studies30,31 found that adding facial expressions or bodily gestures to avatar-mediated virtual environments did not consistently enhance social presence or interpersonal attraction. However, both of these studies employed a task-oriented interaction without time limits and a casual social interaction, which may have given participants enough time and relevant social information to reach a ceiling effect regardless of the nonverbal cues available. This is a reasonable conjecture, considering that increased interaction time can allow interactants to overcome the lack of nonverbal cues available in CMC32. As such, the effects of nonverbal cues independent of increased time or availability of social content are unclear. In addition, despite ample research that points to the association between interpersonal judgments based on nonverbal behavior33, most studies did not utilize the automatically tracked nonverbal data to explore its association with interpersonal outcomes which could further our understanding of the sociopsychological implications of automatically tracked nonverbal cues.
Taking these limitations into account, the present study attempts to elucidate the unique influences of including facial expressions and bodily gestures on interaction outcomes (i.e., interpersonal attraction, social presence, affective valence, impression accuracy) by employing a goal-oriented task with time constraints. The present study also offers a less constricted representation of participants’ nonverbal behavior including expressions of negative and/or neutral states, rather than limiting the available nonverbal cues related to feedback or friendliness (e.g., head nodding, reciprocity, smiling).
Predicting interpersonal attraction with automatically detected nonverbal cues
Nonverbal cues not only influence impression formation, but also reflect one’s attitude toward their communication partner(s)34,35 such as interpersonal attraction31, bonding36, and biased attitudes37. In addition to nonverbal cues that are isolated to the individual, studies have shown that interactional synchrony is associated with more positive interpersonal outcomes38,39,40,41. Interactional synchrony is defined as the “the temporal linkage of nonverbal behavior of two or more interacting individuals”42. Under this definition, synchrony refers to the motion interdependence of all participants during an interaction focusing on more than a single behavior (e.g., posture or eye gaze). This view of synchrony is consistent with Ramseyer and Tschacher’s39 characterization of synchrony and is grounded within the dynamical systems framework43. Interactional synchrony has been associated with the ability to infer the mental states of others44 and rapport45. For example, spontaneous synchrony was related to Theory of Mind46 for participants with and without autism, such that increased synchrony was associated with higher ability to infer the feelings of others47.
While research has consistently found that nonverbal behavior is indicative of interpersonal outcomes38, the vast majority of these studies quantified nonverbal behavior by using human coders who watched video recordings of an interaction and recorded the target nonverbal behaviors or Motion Energy Analysis (MEA; automatic and continuous monitoring of the movement occurring in pre-defined regions of a video). Coding nonverbal behavior by hand is not only slow and vulnerable to biases42,48, but also makes it difficult to capture subtle nonverbal cues that aren’t easily detectible by the human eye. While MEA is more efficient than manual coding, it is limited in that it is based on a frame-by-frame analysis of regions of interest (ROI) and thus susceptible to region-crossing (i.e., movement from one region being confused with that of another region49). That is, MEA does not track individual parts of the body, but pixels within ROI. Given these limitations, researchers have recently turned to the possibility automating the quantification of nonverbal behavior by capitalizing upon dramatic improvements in motion detection technology (e.g., tracking with RGB-D cameras) and computational power (e.g., machine learning)36,42,50. While these methods are also prone to tracking errors, they have the advantage of tracking nonverbal cues in a more targeted manner (i.e., specific joints, facial expressions) and offer higher precision by utilizing depth data in addition to color (RGB) data.
While researchers have started to employ machine learning algorithms to determine the feasibility of using automatically detected nonverbal cues to predict interpersonal outcomes, they either relied solely on isolated nonverbal behaviors36 or entirely on nonverbal synchrony42,51 instead of both isolated and interdependent nonverbal cues. In addition, previous studies have employed relatively small sample sizes (Ndyad range: 15–53). Perhaps for this reason, prior machine learning classifiers either performed above chance level only when dataset selection was exclusive42,51 or showed unreliable performance in terms of validation and testing set accuracy rates36. Consequently, there is inconclusive evidence if automatically tracked nonverbal cues can reliably predict interpersonal attitudes. By employing machine learning algorithms to explore whether nonverbal behaviors can predict interpersonal attitudes, the present study aims to address if and, if so how, automatically tracked nonverbal cues and synchrony are associated with interpersonal outcomes through an inductive process.
Methods
Study design
The present study adopted a 2 Bodily Gestures (Present vs. Absent) × 2 Facial Expressions (Present vs. Absent) between-dyads design. Dyads were randomly assigned to one of the four conditions, and gender was held constant within a dyad. There was an equal number of male and female dyads within each condition. Participants only interacted with each other via their avatars and did not meet or communicate directly with each other prior to the study. The nonverbal channels that were rendered on the avatar were contingent on the experimental condition. Participants in the ‘Face and Body’ condition interacted with an avatar that veridically portrayed their partner’s bodily and facial movements. Participants in the ‘Body Only’ condition interacted with an avatar that veridically represented their partner’s bodily movements, but did not display any facial movements (i.e., static face). In contrast, participants in the ‘Face Only’ condition interacted with an avatar that veridically portrayed their partner’s facial movements, but did not display any bodily movements (i.e., static body). Finally, participants in the ‘Static Avatar’ condition interacted with an avatar that did not display any movements. A graphical representation of each condition is available in Fig. 1.

Graphical representations of the four conditions: static avatar (A), body only (B), face only (C), body and face (D).
Participants
Participants were recruited from two medium-sized Western universities (Foothill College, Stanford University). Participants were either granted course credit or a $40 Amazon gift card for their participation. 280 participants (140 dyads) completed the study. Dyads that included participants who failed the manipulation check (Ndyad = 10) and/or participants who recognized their partners (Ndyad = 6) were excluded from the final analysis. To determine if participants who were part of a specific condition were more likely to fail the manipulation check or to recognize their interaction partners, two chi-square tests were conducted. Results indicated that there were no differences between conditions for either dimension (manipulation check failure: χ2(3) = 1.57, p = 0.67, partner recognition: χ2(3) = 1.78, p = 0.62).
Materials and apparatus
A markerless tracking device (Microsoft Kinect for Xbox One with adaptor for Windows) was used to track participants’ bodily gestures. Using an infrared emitter and sensor, the Microsoft Kinect is able to provide the positional data for 25 skeletal joints at 30 Hz in real-time, allowing unobtrusive data collection of nonverbal behavior. Studies offer evidence that the Kinect offers robust and accurate estimates of bodily movements52. While even higher levels of accuracy can be achieved with marker-based systems, this study employed a markerless system to encourage more naturalistic movements53. The joints that are tracked by the Kinect are depicted in Fig. 2. The present study used 17 joints that belong to the upper body as studies have suggested that the Kinect tends to show poorer performance for lower body joints52 (i.e., left hip, right hip, left knee, right knee, left ankle, right ankle, left foot, right foot), which can result in “substantial systematic errors in magnitude” of movement54.

Joints tracked by the kinect: only colored joints were mapped to avatar.
Participants’ facial expressions were tracked in real-time using the TrueDepth camera on Apple’s iPhone XS. The TrueDepth camera creates a depth map and infrared image of the user’s face, which represents the user’s facial geometry55. More specifically, the TrueDepth camera captures an infrared image of the user’s face and projects and analyzes approximately 30,000 points to create a depth map of the user’s face, which are subsequently analyzed by Apple’s neural network algorithm. Among other parameters, Apple’s ARKit SDK can extract the presence of facial expressions from the user’s facial movements. A full list of the 52 facial expressions that are tracked by ARKit are included in “Appendix 1”. The value of the facial expression (i.e., blendshape) ranges from 0 to 1 and is determined by the current position of a specific facial movement relative to its neutral position55. Each blendshape was mapped directly from the participant’s facial movements. While we do not have a quantitative measure for tracking accuracy, qualitative feedback from pilot sessions with 40 participants suggested that participants found the facial tracking to be accurate.
Discord, one of the most commonly used Voice over Internet Protocol (VoIP) platforms56, was used for verbal communication. Participants were able to hear their partner’s voice through two speakers (Logitech S120 Speaker System) and their voices were detected by the microphone embedded in the Kinect sensor. Participants were able to see each other’s avatars on a television (Sceptre 32" Class FHD (1080P) LED TV (X325BV-FSR)), which was mounted on a tripod stand (Elitech). The physical configuration of the study room can be seen in Fig. 3. The person pictured in Fig. 3 gave informed consent to publish this image in an online open-access publication. The avatar-mediated platform in which participants interacted was programmed using Unity version 2018.2.2. Further details of the technical setup are available in “Appendix 2” and information regarding the system’s latency can be seen in “Appendix 3”.

Configuration of study room (left): (A) iPhone XS for facial tracking, (B) Kinect for Xbox One for body tracking, (C) person being tracked during visual referential task.
Procedure
All study procedures and materials received approval from the Institutional Review Board of Stanford Univeristy. All methods were performed in accordance with relevant guidelines and regulations. Participants in each dyad were asked to come to two separate locations to prevent them from seeing and interacting with each other prior to the study. Participants were randomly assigned to one of the two study rooms, which were configured identically (Fig. 3). Once participants gave informed consent to participate in the study, they completed a pre-questionnaire that measured their personality across five dimensions57 (extraversion, agreeableness, neuroticism, conscientiousness, openness to experience). After each participant completed the pre-questionnaire the experimenter explained that two markerless tracking systems would be used to enable the participant and their partner to interact through the avatar-mediated platform. The participant was then asked to stand on a mat measuring 61 cm × 43 cm that was placed 205 cm away from the Kinect and 20 cm away from the iPhone XS. After the participant stood on the mat, the experimenter asked the participant to confirm that the phone was not obstructing her/his view. If the participant said that the phone was blocking his/her view, the height of the phone was adjusted. Upon confirming that the participant was comfortable with the physical setup of the room and that the tracking systems were tracking the participant, the experimenter opened the avatar-mediated platform and let the participants know that they would be completing two interaction tasks with a partner. After answering any questions that the participants had, the experimenter left the room.
Prior to the actual interaction, participants went through a calibration phase. During this time, participants were told that they would be completing a few calibration exercises to understand the physical capabilities of the avatars. This phase helped participants familiarize themselves to the avatar-mediated platform and allowed the experimenter to verify that the tracking system was properly sending data to the avatar-mediated platform. Specifically, participants saw a ‘calibration avatar’ (Fig. 4) and were asked to perform facial and bodily movements (e.g., raise hands, tilt head, smile, frown). The range of movement that was visualized through the calibration avatar was consistent with the experimental condition of the actual study. All participants were asked to do the calibration exercises regardless of condition in order to prevent differential priming effects stemming from these exercises and demonstrate the range of movements that could be expected from their partner’s avatars.

Avatar used during calibration phase.
After completing the calibration exercises, participants proceeded to the actual study. Participants were informed that they would collaborate with each other to complete two referential tasks: an image-based task (i.e., visual referential task) and a word-based task (i.e., semantic referential task). The order in which the tasks were presented was counterbalanced across all conditions.
The image-based task was a figure-matching task adapted from Hancock and Dunham58. Each participant was randomly assigned the role of the ‘Director’ or the ‘Matcher’. The Director was asked to describe a series of images using both verbal and nonverbal language (e.g., tone/pitch of voice, body language, facial expressions). The Matcher was asked to identify the image that was being described from an array of 5 choices and one “image not present” choice and to notify the Director once he or she believed the correct image had been identified (Fig. 5). Both the Matcher and Director were encouraged to ask and answer questions during this process. The Matcher was asked to select the image that he or she believed was a match for the image that the Director was describing; if the image was not present, the Matcher was asked to select the “image not present” choice. After 7 min or after participants had completed the entire image task (whichever came first), participants switched roles and completed the same task one more time.

Examples of stimuli for visual referential task.
The word-based task was a word-guessing task adapted from the ‘password game’ used in Honeycutt, Knapp, and Powers59. Each participant was randomly assigned the role of the ‘Clue-giver’ or the ‘Guesser’. The Clue-giver was asked to give clues about a series of thirty words using both verbal and nonverbal language. The Guesser was asked to guess the word that was being described. Both the Clue-giver and the Guesser were encouraged to ask and answer questions during this process. Given the open-ended nature of the task, participants were told that they were allowed to skip words if they thought that the word was too challenging to describe or guess. After 7 min or after they had completed the word task (whichever came first), participants switched roles and completed the same task one more time; the Clue-giver became the Guesser and the Guesser became the Clue-giver. The words used in the word-based task were chosen from A Frequency Dictionary of Contemporary American English60, which provides a list of 5,000 of the most frequently used words in the US; 90 words were chosen from the high, medium, and low usage nouns and verbs from this list. The selected words were presented in a random order for the Clue-giver to describe.
These tasks were chosen for the following reasons: first, two types of referential tasks (i.e., visual and semantic) were employed in order to reduce the bias of the task itself toward verbal or nonverbal communication. That is, the visual task was selected as a task more amenable to nonverbal communication, while the semantic task was selected as one more amenable to verbal communication. Second, we adopted a task-oriented social interaction to avoid ceiling effects of the interpersonal outcome measures, given that purely social exchanges are more likely to support personal self-disclosures, which are associated with interpersonal attraction and facilitate impression formation.
After the interaction, participants completed the post-questionnaire which assessed perceptions of interpersonal attraction, affective valence, impression accuracy, and social presence. Participants’ bodily and facial nonverbal data were tracked and recorded unobtrusively during the interaction. As noted in “Methods”, participants gave consent for their nonverbal data to be recorded for research purposes. Once they completed the post-questionnaire, participants were debriefed and thanked.
Measures
Interpersonal attraction
Based on McCroskey and McCain61, two facets of interpersonal attraction were measured, namely social attraction and task attraction. Social attraction was measured by modifying four items from Davis and Perkowitz62 to fit the current context and task attraction was assessed by modifying four items from Burgoon63. Participants rated how strongly they agreed or disagreed with each statement on a 7 point Likert-type scale (1 = Strongly Disagree, 7 = Strongly Agree). The wording for all questionnaire measures is included in “Appendix 4”.
Due to the similarity of the social and task attraction scales, a parallel analysis64 (PA) was run to determine the correct number of components to extract from the eight items. PA results indicated that the data loaded on to a single component, as indicated by Fig. 6. A confirmatory factor analysis with varimax rotation showed that 56% of the variance was explained by the single component, and that the standardized loadings for all items were greater than 0.65 (Table 1). Thus, the two subscales of interpersonal attraction were collapsed into a single measure of interpersonal attraction. The reliability of the scale was good, Cronbach’s α = 0.89. Greater values indicated higher levels of interpersonal attraction (M = 5.84, SD = 0.61); the minimum was 3.75 and the maximum was 7.

Parallel analysis scree plots of actual and resampled interpersonal attraction data.
Affective valence
A Linguistic Inquiry Word Count65 (LIWC) analysis was performed on an open-ended question that asked participants to describe their communication experience. LIWC has been used as a reliable measure for various interpersonal outcomes, including the prediction of deception66, personality67, and emotions68. Affective valence was computed by subtracting the percentage of negative emotion words from the percentage of positive emotion words yielded by the LIWC analysis69. Greater values indicated relatively more positive affect than negative affect (M = 3.59, SD = 3.4); the minimum was − 2.94 and the maximum was 20.
Impression accuracy
Participants completed a self and an observer version of the short 15-item Big Five Inventory70,71 (BFI-S). Participants rated themselves and their partner on 15 items that were associated with five personality dimensions (i.e., extraversion, agreeableness, conscientiousness, neuroticism, and openness to experience) on a 7 point Likert-type scale (1 = Strongly Disagree, 7 = Strongly Agree). Participants were given the option to select “Cannot make judgment” for the observer version of the BFI-S.
Impression accuracy was defined as the profile correlation score, which “allows for an examination of judgments in regard to a target's overall personality by the use of the entire set of […] items in a single analysis”72; that is, impression accuracy was assessed by computing the correlation coefficient across the answers that each participant and their partner gave for the 15 items72,73. Greater values indicated more accurate impressions (M = 0.39, SD = 0.36); the minimum was − 0.64 and the maximum was 0.98.
Social presence
Social presence was measured with items selected from the Networked Minds Measure of Social Presence74,75, one of the most frequently used scales to measure social presence. To reduce cognitive load, 8 items were selected from the scale, which consisted of statements that assessed co-presence, attentional engagement, emotional contagion, and perceived comprehension during the virtual interaction. Participants rated how strongly they agreed or disagreed with each statement on a 7 point Likert-type scale (1 = Strongly Disagree, 7 = Strongly Agree). The reliability of the scale was good, Cronbach’s α = 0.77. Greater values indicated higher levels of social presence (M = 5.47, SD = 0.65); the minimum was 3.38 and the maximum was 6.75.
Nonverbal behavior
Participants’ bodily movements were tracked with the Microsoft Kinect. Due to non-uniform time distances in the tracking data, linear interpolation was used to interpolate the data to uniform time distances of 30 Hz. Then, a second-order, zero-phase bidirectional, Butterworth low-pass filter was applied with a cutoff frequency of 6 Hz to provide smooth estimates76. Participants’ facial expressions were tracked in real-time using the TrueDepth camera on Apple’s iPhone XS and this data was also interpolated to 30 Hz.
Synchrony of bodily movement
Synchrony of bodily movements is defined as the correlation between the extent of bodily movements of the two participants, with higher correlation scores indicating higher synchrony. More specifically, the time series of the extent of bodily movements of the two participants were cross-correlated for 100 s of the interaction. Cross-correlation scores were computed for both positive and negative time lags of five seconds, in accordance to Ramseyer and Tschacher39, which accounted for both ‘pacing’ and ‘leading’ synchrony behavior. Time lags were incremented at 0.1 s intervals, and cross-correlations were computed for each interval by stepwise shifting one time series in relation to the other39. While the Kinect can capture frames at 30 Hz, the sampling rate varies and the resulting data is noisy. During post-processing, we addressed both shortcomings by filtering and downsampling to a uniform frequency. As noted above, a Butterworth low-pass filter with a cutoff frequency of 6 Hz was applied to remove signal noise, and then was interpolated to 10 Hz to achieve a uniform sampling rate across the body and face. In instances wherein less than 90% of the data were tracked within a 100 s interval, the data from that interval were discarded. Participants’ synchrony scores were computed by averaging the cross-correlation values.
Synchrony of facial expressions
Synchrony of facial expressions is similarly defined as the correlation between the time series of facial movements. Once again, the time series of facial movements of the two participants were cross-correlated for each 100 s interval of the interaction. Cross-correlations were computed for both positive and negative time lags of 1 s, in accordance with Jaques et al.36). Time lags were incremented at 0.1 s intervals, and cross-correlations were computed for each interval by stepwise shifting one time series in relation to the other. The facial tracking data was downsampled to 10 Hz to compensate for gaps that were introduced after the data was mapped from a continuous to a uniformly spaced time scale. (Fig. 7). Once again, if less than 90% of the data were tracked within a given 100 s interval, the data from that interval were discarded. Participants’ synchrony scores were computed by averaging the cross-correlation values.

Illustration of post-processing sequence for facial movement data.
Extent of bodily movement
To assess the extent to which participants moved their body, the between-second Euclidean distance for each joint was computed across the interaction. This is equivalent to the Euclidean distance for each joint for each 0.03 s (30 Hz). The average Euclidian distance for each 0.03 s interval for each joint was then averaged across the 17 joints to form a single composite score.
Extent of facial movement
To assess the extent of facial movement during the interaction, the confidence scores for each facial movement (i.e., the deviation of each facial movement from the neutral point) was sampled at a rate of 30 Hz and averaged to form a single composite score. Facial expressions that had a left and right component (e.g., Smile Left and Smile Right) were averaged to form a single item. Finally, facial movements that showed low variance during the interaction were excluded to avoid significant findings due to spurious tracking values.
Machine learning
Machine learning is defined “a set of methods that can automatically detect patterns in data, and then use the uncovered patterns to predict future data, or to perform other kinds of decision making under uncertainty”77. Machine learning is an inductive method which can be used to process large quantities of data to produce bottom-up algorithms42. This makes machine learning suitable for discovering potential patterns within millions of quantitative nonverbal data points. Two machine learning algorithms—random forest and a neural network model (multilayer perceptron; MLP)—that used the movement data as the input layer and interpersonal attraction as the output layer were constructed. To allow for the machine learning algorithm to function as a classifier, participants were divided into high and low interpersonal attraction groups based on a median split78. Then, the dataset was randomly partitioned into a training (70%) and test dataset (30%).
There were 827 candidate features for the input layer; bodily synchrony among 17 joints and 10 joint angles42; facial synchrony among the 52 facial expressions (“Appendix 1”; four different types of nonverbal synchrony were included as candidates: mean cross-correlation score, absolute mean of cross-correlation scores, mean of non-negative cross-correlation scores, and maximum cross-correlation score); the mean, standard deviation, mean of the gradient, standard deviation of the gradient, maximum of the gradient, and maximum of the second gradient for each joint coordinate (i.e., X, Y, Z); the mean and standard deviation of the Euclidean distance for each joint for each 0.1 s interval; the mean, standard deviation, mean of the absolute of the gradient, and the standard deviation of the absolute of the gradient for the joint angles; the mean and standard deviations of the head rotation (i.e., pitch, yaw, roll); the mean and standard deviations of the gradient of the head rotation; the mean and standard deviations of the 52 facial expressions; the mean and standard deviation of the X and Y coordinates of point of gaze; the percentage of valid data and the number of consecutive missing data points; gender.
Two methods of feature selection were explored for the training set. First, features were selected using a correlation-based feature selection method, wherein features that highly correlated with the outcome variable, but not with each other were selected79. Then, support vector machine recursive feature elimination80 was used to reduce the number of features and identify those that offered the most explanatory power. The test dataset was not included in the data used for feature selection. 23 features were selected using this method (Table 2).
Using five-fold cross-validation, the selected features were used to train two different machine learning models (i.e., random forest, MLP) in order to assess initial model performance. More specifically, five-fold cross-validation was used to validate and tune the model performance given the training dataset prior to applying the classifier to the holdout test data. Five-fold cross-validation divides the training set into five samples that are roughly equal in size. Among these samples, one is held out as a validation dataset, while the remaining samples are used for training; this process is repeated five times to form a composite validation accuracy score (i.e., the percentage of correctly predicted outcomes).
Statistical analyses
Data from participants who communicate with each other are vulnerable to violating the assumption of independence and are thus less appropriate for ANOVA and standard regression approaches81. Multilevel analysis “combines the effects of variables at different levels into a single model, while accounting for the interdependence among observations within higher-level units”82. Because neglecting intragroup dependence can bias statistical estimates including error variance, effect sizes and p values83,84, a multilevel model was used to analyze the data. Random effects that arise from the individual subjects who are nested within dyads were accounted for and a compound symmetry structure was used for the within-group correlation structure. Gender was included as a control variable, as previous research has found that females tend to report higher levels of social presence than their male counterparts85. In line with these studies, correlation analyses (Table 3) showed that gender correlated with several of the dependent variables. A summary of the results of the multilevel analyses are available in Table 4.
Results
Manipulation check
To confirm that the manipulation of the nonverbal variables was successful, participants were asked if the following two sentences accurately described their experience (0 = No, 1 = Yes): “My partner's avatar showed changes in his/her facial expressions, such as eye and mouth movements” and “My partner's avatar showed changes in his/her bodily gestures, such as head and arm movements”. 11 participants who belonged to 10 separate dyads failed the manipulation check; these participants and their partners were removed from the final data analyses (Ndyad = 10, Nparticipant = 20).
An additional 7 participants who belonged to 6 separate dyads reported that they recognized their interaction partners. These participants and their partners (Ndyad = 6, Nparticipant = 12) were also removed from data analyses, resulting in a final sample size of 248 participants (Ndyad = 124).
Interpersonal attraction
There was a significant main effect of facial movements on interpersonal attraction (Fig. 8), such that dyads that were able to see their partner’s facial movements mapped on their avatars felt higher levels of interpersonal attraction than those that were unable to see these facial movements (b = 0.09, p = 0.02, d = 0.30). In contrast, the availability of bodily movements did not significantly influence interpersonal attraction (b = − 0.02, p = 0.57). The interaction effect between facial and bodily movements was also non-significant (b = 0.05, p = 0.17).

Mean interpersonal attraction by condition.
Affective valence
There was a significant interaction between facial and bodily movements (b = 0.46, p = 0.03, Fig. 9). Simple effects tests showed that while dyads that could see their partner’s facial movements described their experience more positively, this was only true when their partner’s bodily movements were also visible (b = 0.84, p = 0.01, d = 0.50); in contrast, the positive effect of facial movement on affective valence was non-significant when bodily movements were not visible (b = − 0.07, p = 0.80). These results suggest that dyads only described their experiences most positively when they were able to see both their partner’s bodily movements and their facial movements, lending partial support to studies that showed a preference for representation consistency86.

Mean affective valence by condition.
Impression accuracy
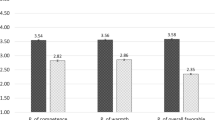
Impression accuracy was significantly and positively influenced by the availability of facial movements (b = 0.06, p = 0.02, d = 0.34, Fig. 10). In contrast, being able to see one’s partner’s bodily movements did not influence impression accuracy (b = − 0.01, p = 0.60). The interaction between facial and bodily movements was also non-significant (b = 0.03, p = 0.27).

Mean impression accuracy by condition.
Social presence
Neither the availability of facial movements (b = 0.04, p = 0.29) nor the availability of bodily movements (b = 0.04, p = 0.31) had a significant effect on social presence. The interaction effect between facial and bodily movements was also non-significant (b = 0.06, p = 0.16).
Extent of bodily movement
Dyads who were able to see their partner’s bodily movements being mapped on to their partner’s avatars moved their body more (b = 0.02, p < 0.0001), although this main effect was qualified by a significant interaction effect (b = 0.01, p = 0.048). Simple effects tests showed that dyads who could see their partner’s bodily movements moved more when their partner’s facial movements were also visible (b = 0.04, p < 0.001, d = 0.89); this effect of bodily movement was only marginally significant when their partner’s facial movements were not visible (b = 0.01, p = 0.09).
Extent of facial movement
In contrast to bodily movements, the visibility of one’s partner’s facial movements did not influence the extent to which dyads moved their faces (b = − 0.0004, p = 0.79). Neither the main effect of bodily movements (b = 0.001, p = 0.60) nor the interaction effect between facial and bodily movements were significant (b = 0.002, p = 0.18).
Nonverbal synchrony
The visibility of facial movements positively predicted synchrony in facial movements (b = 0.01, p < 0.001), while the presence of bodily movement did not predict facial synchrony (b = − 0.0002, p = 0.95); the interaction term between face and body was also non-significant (b = 0.00004, p = 0.99). Gender significantly predicted facial synchrony, such that females displayed higher facial synchrony than males (b = 0.02, p < 0.001).
Dyads that were able to see their partner’s bodily movements exhibited marginally higher levels of bodily synchrony compared to those that were unable to see each other (b = 0.002, p = 0.09, d = 0.28). Neither the presence of facial movement nor gender significantly predicted synchrony in bodily movement (both ps > 0.10). The interaction term was also non-significant (b = − 0.001, p = 0.62).
To assess the robustness of the synchrony measure, we explored synchrony patterns across different time lags (Fig. 11) and found that synchrony scores decrease as the time lag increases for both facial and bodily synchrony, which suggests that the scores are representative of true synchrony42. That is, as the time lag between the two streams of each participant’s nonverbal data increases, the synchrony score approaches closer to zero, which is the expected pattern, given that nonverbal synchrony is defined as the “temporal co-occurrence of actions”87. T-tests also showed that both synchrony scores were significantly different from zero (Bodily Synchrony: t(245) = 14.72, p < 0.001; Facial Synchrony: t(244) = 14.66, p < 0.001), with a large effect size (Cohen’s d = 0.939 and Cohen’s d = 0.937 for bodily synchrony and facial synchrony, respectively).

Averaged correlations of bodily (left) and facial (right) movements: represents changes in synchrony scores based on offset interval*.
Movement data and interpersonal attraction
Both classifiers were able to predict interpersonal attraction at an accuracy rate higher than chance, suggesting that automatically detected nonverbal cues can be used to infer interpersonal attitudes. After tuning the hyperparameters (Table 5) based on the cross-validation performance of the training set, the random forest model achieved a cross-validation accuracy of 67.33% (SD = 8.28%) and a test accuracy of 65.28%; the MLP model achieved a cross-validation accuracy of 68.67% (SD = 5.63%) and a test accuracy of 65.28% (majority class baseline: 51.39%). Confusion tables that depict sensitivity and specificity assessments for the two models are in Fig. 12.

Confusion table for random forest model (left) and multi-layer perceptron model (right).
Discussion
The present study aimed to understand the relative and joint influence of facial and bodily cues on communication outcomes. Contrary to hypotheses based on behavioral realism, the inclusion of bodily gestures alone did not have a significant main effect on interpersonal attraction, social presence, affective valence, and impression formation. Additionally, when facial cues were not available, LIWC data suggested that participants felt more positively when bodily gestures were not available, compared to when they were. These results are in line with studies that did not find support for the conjecture that avatar movement would increase social presence or improve interpersonal outcomes30,31. At the same time, they appear to contradict previous research and theories suggesting that additional social cues and/or social realism lead to higher levels of social presence and more positive communication outcomes21,22,88,89. In contrast to the null effect of including bodily gestures, the present study found evidence that the presence of facial expressions can moderately improve communication outcomes across multiple dimensions, including interpersonal attraction, affective valence, and impression accuracy.
The null main effect of bodily gestures on interpersonal outcomes may, at least in part, be explained by the following mechanisms. First, participants may have been able to compensate for the lack of bodily cues with the other cues at their disposition (e.g., verbal cues). This explanation is in line with previous CMC theories (e.g., Social Information Processing Theory32), which found that increased interaction time allows interactants to overcome the lack of nonverbal cues available. At the same time, the positive interpersonal effects of facial cues suggest that, at minimum, facial cues offered a unique value to participants within the current avatar-mediated context that bodily cues did not.
Second, bodily movements may have been less relevant than facial movements and speech within the context of the present study. Although we adopted a visual and semantic referential task to encourage both nonverbal and verbal communication, the presence (or absence) of bodily movements was not an integral part of completing the tasks. In addition, because the participants were not immersed in the same virtual space (i.e., communicated in separate rooms through a screen), it is possible that they lacked the common ground to effectively communicate via gestures. Considering that the interaction context heavily influences the communicational value of gestures90,91 the inclusion of gestures may have yielded more positive outcomes if participants had been communicating within a context where gestures carried higher semantic and practical value.
In addition to the specific requirements of the tasks performed by the participants, the experimental setup itself may have encouraged participants to focus on the avatar’s face, rather than its body. As depicted in Fig. 2, participants interacted with an avatar whose representation was limited to the upper body. This was an intentional choice primarily due to the limitations of the Kinect in tracking lower body joints. However, it is possible that the lack of ‘full body representation’ led to a cognitive bias favoring the face. Taken together with the results of the present study, it appears that upper body gestures within separate (‘non-shared’) virtual spaces may be relatively less important for dyadic interactions.
A final explanation for the null—and in some cases, negative—impact of bodily movements, however, may be that the technical limitations of the systems led to poor body tracking. While plausible, the fact that participants who were able to see their partner’s facial expressions and bodily movements described their experience the most positively suggests that, at the very least, technical limitations were not uniquely responsible for the negative impact of bodily movements on affective valence. That is, even when considering the technical limitations, having access to bodily gestures had a positive impact on affective valence when they were coupled with facial expressions. This is consistent with Aviezer and colleagues12 who argue that facial and bodily cues are processed as a unit rather than independently.
While the accuracy rate of the machine learning model was weak (approximately 65%), it is important to note that interpersonal attitudes are difficult for even human judges to predict. For example, judges who viewed videotaped interactions between two individuals were able to rate interpersonal rapport at an accuracy rate that was higher than chance, but the effect size was fairly small92 (i.e., r = 24). In addition, it is important to note that previous studies showed inconclusive evidence that machine learning could be applied to consistently predict interpersonal attitudes for a non-selective data set. For instance, the accuracy rate of previous studies42,51 were at chance level when the classifier was applied to the entire dataset, and were above chance only when data set selection was exclusive (i.e., increasingly removing interaction pairs that scored closer to the median). Similarly, the validation accuracy rate for Jacques and colleagues36 was close to chance level (approximately 5% higher than baseline), which is a relatively large difference from the testing set accuracy (approximately 20% higher than baseline), a limitation which is also noted by the authors. Albeit low, the present study shows validation and test accuracy rates that are both approximately 15% higher than the baseline, offering stronger evidence that machine learning can be applied to the prediction of more complex interpersonal outcomes.
Investigating which cues most strongly influence avatar-mediated interactions can help researchers isolate the cues that people rely on to form affective and cognitive judgments about others and communication experiences using an inductive process. While the majority of extant studies have used deductive processes to test whether specific nonverbal cues would affect user perceptions of virtual interactions30,93,94, only a select number of studies have jointly relied on inductive processes (e.g., machine learning) to isolate cues that contribute most strongly to interpersonal outcomes36. Machine learning can help identify significant nonverbal cues for interpersonal outcomes through feature selection processes and model comparisons. Identifying and testing these cues can help inform theories of person perception and impression formation. Recent advancements in facial and motion tracking technology and computing power render this bottom-up approach particularly attractive for nonverbal theory development.
From a practical standpoint, identifying nonverbal cues with the strongest social influence can help VR designers and engineers prioritize features that should be available within virtual environments. Given the amount of resources that are being invested into developing social VR platforms, understanding where to focus development efforts can aid in allocating resources more effectively. For instance, the present study suggests that facial animations are critical for positive avatar-mediated interactions, especially when there are bodily movements. As such, the development of avatars that are able to both express realistic facial expressions and credibly transition between expressions coupled with technologies that can accurately track the user’s facial expressions in real time could improve interpersonal outcomes and improve human–machine interactions. Within the context of immersive VR, however, most of the tracking technology has thus far focused on body tracking (e.g., Oculus Touch, HTC Vive Lighthouse). This bias is likely due to the fact that most of these systems rely on bodily nonverbal behavior as input to render the virtual environment appropriately. Additionally, the use of head-mounted displays makes it challenging to track facial expressions. The current findings offer some evidence that social VR platforms, immersive or not, may benefit from investing in technologies that can capture (or infer) and map facial expressions within avatar-mediated environments.
This investigation employed a novel technical set up that allowed for the activation and deactivation of specific nonverbal channels to study their individual and joint effects on interpersonal outcomes. Our setup differentiates itself from prominent social VR applications, which are generally limited to body tracking. While a small number of applications do support face tracking, these have remained relatively costly solutions that aren’t widely available. We demonstrate a solution capable of tracking both the face and body by combining ubiquitously available consumer electronics.
Outside the study of avatar-mediated environments, this setup could be adapted by nonverbal communication researchers to further understand the impact of specific nonverbal channels during FtF interaction and help address methodological challenges associated with manually coding nonverbal behavior or reduced ecological validity (e.g., having to block out specific body parts19). Additionally, with the increasing availability of large data sets of automatically detected nonverbal behavior, inductive processes can be leveraged to produce bottom-up algorithms42 that can help identify nonverbal patterns during specific interactions that cannot be perceived by the human eye.
Limitations
It is important to note the limitations associated with the present study. First, the technical setup of the present study focused on the tracking and rendering of nonverbal cues, but did not account for dimensions such as stereoscopic viewing or perspective dependency. This limits the generalizability of our findings to contexts wherein different VR technologies are utilized. Future studies would benefit from exploring the interplay between different technological affordances and the availability of nonverbal cues.
Second, our focus was limited to two nonverbal channels: body and face. As such, we were unable to explore the effects of additional nonverbal cues such as tone or intonation. While this is beyond the scope of the present study, future research should explore the impact of these cues along with facial and nonverbal behavior to better understand the effects of various nonverbal channels on interaction outcomes.
Another limitation of the study lies in the relatively specific interaction context wherein participants were asked to collaborate on one visual and one semantic referential task. This decision was made primarily to avoid ceiling effects on impression formation58 and to control for the variance in communication content (e.g., extent of self-disclosure) that can influence interpersonal outcomes. However, it is likely that the task-centered nature of the interaction context restricted the social and affective aspects of the interaction, which may have limited the role of nonverbal communication. Furthermore, due to the collaborative nature of the task, participants may have been more prone to display favorable nonverbal cues. The specificity of the current context also reduces the generalizability of the current findings, as everyday interactions are characterized by a combination of both task-oriented and social content95,96. Future studies should employ different interaction contexts to understand potential boundary conditions.
Additionally, while we simultaneously varied facial and bodily cues for the visual referential task (see “Methods”), it is possible that participants found this task to be biased toward facial expressions as they resembled emojis, rendering facial expressions more salient than bodily cues. Follow-up studies should thus sample different tasks to account for stimuli effects97.
Finally, the technical limitations associated with markerless tracking need to be addressed. While the present study used two of the most precise motion tracking systems that are currently available, there were still limitations in terms of the range of movements that the systems could track. For instance, participants needed to stay within a specific distance from the facial tracking camera in order to ensure smooth tracking (see “Methods”) and touching the face or turning the head completely away from the camera resulted in tracking errors. In addition, while our latency was within the established range for video-based communication (“Appendix 4”), it is unlikely that our system was able to reliably capture and render micro-expressions.
The Kinect was also limited in its tracking when there was an overlap between joints (e.g., when the participant crossed his or her arms) and for certain rotation angles. Because this tracking data was used to animate the avatars, it is probable that these technical limitations led to instances wherein the movements of the avatar appeared unnatural. While this was an inevitable limitation given the current state of the technology, more studies should be conducted as motion tracking technology continues to advance.
Conclusion
The present study found that people who are able to see their partner’s facial cues mapped on their avatars like their partners more and form more accurate impressions in terms of personality. Contrary to hypotheses, the availability of bodily cues alone did not improve communication outcomes. In addition, we found that machine learning classifiers trained with automatically tracked nonverbal data could predict interpersonal attraction at an accuracy rate that was approximately 15% higher than chance. These findings provide new insights on the individual and joint interaction of two nonverbal channels in avatar-mediated virtual environments and expand on previous research suggesting that the automatic detection of nonverbal cues can be used to predict emotional states. This is particularly prescient as technology makes it increasingly easy to automatically detect and quantify nonverbal behavior.
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Steuer, J. Defining virtual reality: dimensions determining telepresence. J. Commun. 42, 73–93 (1992).
Bailenson, J. N. & Blascovich, J. Avatars. In Encyclopedia of Human–Computer Interaction 64–68 (ed. Bainbridge, W.) (Berkshire Publishing Group, Great Barrington, 2004).
Blascovich, J. et al. Immersive virtual environment technology as a methodological tool for social psychology. Psychol. Inq. 13, 103–124 (2002).
Trivedi, V. How to Speak Tech (Apress, New York, 2019).
Constine, J. Facebook animates photo-realistic avatars to mimic VR users’ faces. TechCrunch. https://techcrunch.com/2018/05/02/facebook-photo-realistic-avatars/ (2018).
Roth, D., Waldow, K., Stetter, F., Bente, G., Latoschik, M. E. & Fuhrmann, A. SIAMC: a socially immersive avatar mediated communication platform. In: Proceedings of the 22nd ACM Conference on Virtual Reality Software and Technology 357–358 (2016).
Roth, D., Bente, G., Kullmann, P., Mal, D., Purps, C. F., Vogeley, K. & Latoschik, M. E. Technologies for social Augmentations in user-embodied virtual reality. In: Proceedings of the 25th ACM Symposium on Virtual Reality Software and Technology 1–12 (2019).
Bente, G., Rüggenberg, S., Krämer, N. C. & Eschenburg, F. Avatar-mediated networking: increasing social presence and interpersonal trust in net-based collaborations. Hum. Commun. Res. 34, 287–318 (2008).
Smith, H. J. & Neff, M. Communication behavior in embodied virtual reality. In; Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems 1–12 (2018).
Reeves, B. & Nass, C. The Media Equation: How People Treat Computers, Television, and New Media like Real People and Places (Cambridge University Press, Cambridge, 1996).
Hancock, J. T., Landrigan, C. & Silver, C. Expressing emotion in text-based communication. In: Proceedings of the SIGCHI Conference on Human Factors in Computing Systems 929–932 (2007).
Aviezer, H., Trope, Y. & Todorov, A. Holistic person processing: faces with bodies tell the whole story. J. Pers. Soc. Psychol. 103, 20–37 (2012).
Aviezer, H., Trope, Y. & Todorov, A. Body cues, not facial expressions, discriminate between intense positive and negative emotions. Science 338, 1225–1229 (2012).
Ekman, P. Differential communication of affect by head and body cues. J. Pers. Soc. Psychol. 2, 726–735 (1965).
Shields, K., Engelhardt, P. & Ietswaart, M. Processing emotion information from both the face and body: an eye-movement study. Cogn. Emot. 26, 699–709 (2012).
Van den Stock, J., Righart, R. & de Gelder, B. Body expressions influence recognition of emotions in the face and voice. Emotion 7, 487–494 (2007).
Boyanowsky, E. & Griffiths, C. Weapons and eye contact as instigators or inhibitors of aggressive arousal in police–citizen interaction. J. Appl. Soc. Psychol. 12, 398–407 (1982).
Drummond, P. & Bailey, T. Eye contact evokes blushing independently of negative affect. J. Nonverbal Behav. 37, 207–216 (2013).
Ekman, P. & Friesen, W. V. Detecting deception from the body or face. J. Pers. Soc. Psychol. 29, 288–298 (1974).
Martinez, L., Falvello, V., Aviezer, H. & Todorov, A. Contributions of facial expressions and body language to the rapid perception of dynamic emotions. Cogn. Emot. 30, 939–952 (2016).
Guadagno, R., Blascovich, J., Bailenson, J. & Mccall, C. Virtual humans and persuasion: the effects of agency and behavioral realism. Media Psychol. 10, 1–22 (2007).
von der Pütten, A., Krämer, N., Gratch, J. & Kang, S. “It doesn’t matter what you are!” Explaining social effects of agents and avatars. Comput. Hum. Behav. 26, 1641–1650 (2010).
Roth, D., Kleinbeck, C., Feigl, T., Mutschler, C. & Latoschik, M. E. Beyond replication: augmenting social behaviors in multi-user virtual realities. In Proceedings of the 2018 IEEE Conference on Virtual Reality and 3D User Interfaces 215–222 (2018).
Roth, D., Kullmann, P., Bente, G., Gall, D. & Latoschik, M. E. Effects of hybrid and synthetic social gaze in avatar-mediated interactions. In: Proceedings of the 2018 IEEE International Symposium on Mixed and Augmented Reality Adjunct 103–108 (2018).
Roth, D., Lugrin, J. L., Galakhov, D., Hofmann, A., Bente, G., Latoschik, M. E. & Fuhrmann, A. Avatar realism and social interaction quality in virtual reality. In: Proceedings of the 2016 IEEE Conference on Virtual Reality and 3D User Interfaces 277–278 (2016).
Guerrero, L. Observer ratings of nonverbal involvement and immediacy. In The Sourcebook of Nonverbal Measures: Going Beyond Words 221–235 (ed. Manusov, V.) (Lawrence ErlBaum, Mahwah, 2005).
Kellerman, J., Lewis, J. & Laird, J. Looking and loving: the effects of mutual gaze on feelings of romantic love. J. Res. Pers. 23, 145–161 (1989).
Kang, S. H. & Gratch, J. Exploring users’ social responses to computer counseling interviewers’ behavior. Comput. Hum. Behav. 34, 120–130 (2014).
Kang, S. H. & Watt, J. H. The impact of avatar realism and anonymity on effective communication via mobile devices. Comput. Hum. Behav. 29, 1169–1181 (2013).
Oh, S. Y., Bailenson, J., Krämer, N. & Li, B. Let the avatar brighten your smile: effects of enhancing facial expressions in virtual environments. PLoS ONE 11, e0161794. https://doi.org/10.1371/journal.pone.0161794 (2016).
Herrera, F., Oh, S. Y. & Bailenson, J. N. Effect of behavioral realism on social interactions inside collaborative virtual environments. PRESENCE Virtual Augment. Real. 27, 163–182 (2020).
Walther, J. Interpersonal effects in computer-mediated interaction: a relational perspective. Commun. Res. 19, 52–90 (1992).
Ambady, N. & Rosenthal, R. Half a minute: predicting teacher evaluations from thin slices of nonverbal behavior and physical attractiveness. J. Pers. Soc. Psychol. 64, 431–441 (1993).
Babad, E. Guessing teachers’ differential treatment of high- and low-achievers from thin slices of their public lecturing behavior. J. Nonverbal Behav. 29, 125–134 (2005).
Feldman, R. Nonverbal disclosure of teacher deception and interpersonal affect. J. Educ. Psychol. 68, 807–816 (1976).
Jaques, N., McDuff, D., Kim, Y. L. & Picard, R. Understanding and predicting bonding in conversations using thin slices of facial expressions and body language. In: Proceedings of the International Conference on Intelligent Virtual Agents 64–74 (Springer, 2016).
Babad, E., Bernieri, F. & Rosenthal, R. When less information is more informative: diagnosing teacher expectations from brief samples of behaviour. Br. J. Educ. Psychol. 59, 281–295 (1989).
Rennung, M. & Göritz, A. S. Prosocial consequences of interpersonal synchrony. Z. Psychol. 224, 168–189 (2016).
Ramseyer, F. & Tschacher, W. Nonverbal synchrony in psychotherapy: coordinated body movement reflects relationship quality and outcome. J. Consult. Clin. Psychol. 79, 284–295 (2011).
Hove, M. & Risen, J. It’s all in the timing: Interpersonal synchrony increases affiliation. Soc. Cognit. 27, 949–960 (2009).
Tarr, B., Slater, M. & Cohen, E. Synchrony and social connection in immersive virtual reality. Sci. Rep. 8, 3693. https://doi.org/10.1038/s41598-018-21765-4 (2018).
Won, A., Bailenson, J., Stathatos, S. & Dai, W. Automatically detected nonverbal behavior predicts creativity in collaborating dyads. J. Nonverbal Behav. 38, 389–408 (2014).
Schmidt, R., Morr, S., Fitzpatrick, P. & Richardson, M. Measuring the dynamics of interactional synchrony. J. Nonverbal Behav. 36, 263–279 (2012).
Iacoboni, M. Imitation, empathy, and mirror neurons. Annu. Rev. Psychol. 60, 653–670 (2009).
Cappella, J. N. On defining conversational coordination and rapport. Psychol. Inq. 1, 303–305 (1990).
Morton, A. Frames of Mind: Constraints on the Common-sense Conception of the Mental (Oxford University Press, Oxford, 1980).
Fitzpatrick, P. et al. Relationship between theory of mind, emotion recognition, and social synchrony in adolescents with and without autism. Front. Psychol. 9, 1337. https://doi.org/10.3389/fpsyg.2018.01337 (2018).
Lumsden, J., Miles, L. & Macrae, C. Perceptions of synchrony: different strokes for different folks?. Perception 41, 1529–1531 (2012).
Ramseyer, F. & Tschacher, W. Nonverbal synchrony of head-and body-movement in psychotherapy: different signals have different associations with outcome. Front. Psychol. 5, 979. https://doi.org/10.3389/fpsyg.2014.00979 (2014).
Bailenson, J. Protecting nonverbal data tracked in virtual reality. JAMA Pediatrics 172, 905–906 (2018).
Won, A., Bailenson, J. & Janssen, J. Automatic detection of nonverbal behavior predicts learning in dyadic interactions. IEEE Trans. Affect. Comput. 5, 112–125 (2014).
Wang, Q., Kurillo, G., Ofli, F. & Bajcsy, R. Evaluation of pose tracking accuracy in the first and second generations of Microsoft Kinect. In: Proceedings of the 2015 International Conference on Healthcare Informatics 380–389 (2015).
Ceseracciu, E., Sawacha, Z. & Cobelli, C. Comparison of markerless and marker-based motion capture technologies through simultaneous data collection during gait: proof of concept. PLoS ONE 9, e87640. https://doi.org/10.1371/journal.pone.0087640 (2014).
Xu, X., McGorry, R., Chou, L., Lin, J. & Chang, C. Accuracy of the Microsoft Kinect™ for measuring gait parameters during treadmill walking. Gait Posture 42, 145–151 (2015).
Apple. About Face ID advanced technology. https://support.apple.com/en-us/HT208108 (2019).
Lacher, L. & Biehl, C. Using discord to understand and moderate collaboration and teamwork. In: Proceedings of the 49th ACM Technical Symposium on Computer Science Education 1107–1107 (2018).
Goldberg, L. The structure of phenotypic personality traits. Am. Psychol. 48, 26–34 (1993).
Hancock, J. & Dunham, P. Impression formation in computer-mediated communication revisited: an analysis of the breadth and intensity of impressions. Commun. Res. 28, 325–347 (2001).
Honeycutt, J., Knapp, M. & Powers, W. On knowing others and predicting what they say. West. J. Speech Commun. 47, 157–174 (1983).
Davies, M. & Gardner, D. A Frequency Dictionary of Contemporary American English (Routledge, Abingdon, 2010).
McCroskey, J. & McCain, T. The measurement of interpersonal attraction. Speech Monogr. 41, 261–266 (1974).
Davis, D. & Perkowitz, W. Consequences of responsiveness in dyadic interaction: effects of probability of response and proportion of content-related responses on interpersonal attraction. J. Pers. Soc. Psychol. 37, 534–550 (1979).
Burgoon, M. Amount of conflicting information in a group discussion and tolerance for ambiguity as predictors of task attractiveness. Speech Monogr. 38, 121–124 (1971).
Franklin, S., Gibson, D., Robertson, P., Pohlmann, J. & Fralish, J. Parallel analysis: a method for determining significant principal components. J. Veg. Sci. 6, 99–106 (1995).
Pennebaker, J.W., Boyd, R.L., Jordan, K. & Blackburn, K. The Development and Psychometric Properties of LIWC2015 (University of Texas at Austin, 2015).
Toma, C. & Hancock, J. What lies beneath: the linguistic traces of deception in online dating profiles. J. Commun. 62, 78–97 (2012).
Pennebaker, J. & Graybeal, A. Patterns of natural language use: disclosure, personality, and social integration. Curr. Dir. Psychol. Sci. 10, 90–93 (2001).
Woo, C. et al. Separate neural representations for physical pain and social rejection. Nat. Commun. 5, 5380. https://doi.org/10.1038/ncomms6380 (2014).
Pennebaker, J., Mayne, T. & Francis, M. Linguistic predictors of adaptive bereavement. J. Pers. Soc. Psychol. 72, 863–871 (1997).
John, O. P. & Srivastava, S. The Big Five trait taxonomy: history, measurement, and theoretical perspectives. In Handbook of Personality: Theory and Research 102–138 (eds Pervin, L. & John, O. P.) (The Guilford Press, New York, 1999).
Lang, F., John, D., Lüdtke, O., Schupp, J. & Wagner, G. Short assessment of the Big Five: robust across survey methods except telephone interviewing. Behav. Res. Methods 43, 548–567 (2011).
Letzring, T., Wells, S. & Funder, D. Information quantity and quality affect the realistic accuracy of personality judgment. J. Pers. Soc. Psychol. 91, 111–123 (2006).
Kolar, D., Funder, D. & Colvin, C. Comparing the accuracy of personality judgments by the self and knowledgeable others. J. Pers. 64, 311–337 (1996).
Biocca, F., Harms, C. & Gregg, J. The networked minds measure of social presence: pilot test of the factor structure and concurrent validity In: Proceedings of the 4th Annual International Workshop on Presence 1–9 (2001).
Harms, C. & Biocca F. Internal consistency and reliability of the networked minds social presence measure. In: Proceedings of the 7th Annual International Workshop on Presence 246–251 (2004).
Elgendi, M., Picon, F., Magnenat-Thalmann, N. & Abbott, D. Arm movement speed assessment via a Kinect camera: a preliminary study in healthy subjects. Biomed. Eng. Online 13, 88 (2014).
Murphy, K. Machine Learning: A Probabilistic Perspective (MIT Press, Cambridge, 2012).
Vahid, A., Mückschel, M., Neuhaus, A., Stock, A. & Beste, C. Machine learning provides novel neurophysiological features that predict performance to inhibit automated responses. Sci. Rep. 8, 16235. https://doi.org/10.1038/s41598-018-34727-7 (2018).
Hall, M. Correlation-based Feature Selection for Machine Learning (The University of Waikato, 1999).
Guyon, I., Weston, J., Barnhill, S. & Vapnik, V. Gene selection for cancer classification using support vector machines. Mach. Learn. 46, 389–422 (2002).
Butler, E., Lee, T. & Gross, J. Emotion regulation and culture: are the social consequences of emotion suppression culture-specific?. Emotion 7, 30–48 (2007).
McMahon, J., Pouget, E. & Tortu, S. A guide for multilevel modeling of dyadic data with binary outcomes using SAS PROC NLMIXED. Comput. Stat. Data Anal. 50, 3663–3680 (2006).
Kenny, D. & Judd, C. Consequences of violating the independence assumption in analysis of variance. Psychol. Bull. 99, 422–431 (1986).
Walther, J. & Bazarova, N. Misattribution in virtual groups: the effects of member distribution on self-serving bias and partner blame. Hum. Commun. Res. 33, 1–26 (2007).
Thayalan, X., Shanthi, A. & Paridi, T. Gender difference in social presence experienced in e-learning activities. Procedia Soc. Behav. Sci. 67, 580–589 (2012).
Bailenson, J., Yee, N., Merget, D. & Schroeder, R. The effect of behavioral realism and form realism of real-time avatar faces on verbal disclosure, nonverbal disclosure, emotion recognition, and copresence in dyadic interaction. Presence Teleoper. Virtual Environ. 15, 359–372 (2006).
Schmidt, R. C. & Richardson, M. J. Dynamics of interpersonal coordination. In Coordination: Neural, Behavioral and Social Dynamics 281–308 (eds Fuchs, A. & Jirsa, V. K.) (Springer, Berlin, 2008).
Daft, R. & Lengel, R. Organizational information requirements, media richness and structural design. Manag. Sci. 32, 554–571 (1986).
Short, J., Williams, E. & Christie, B. The Social Psychology of Telecommunications (Wiley, Hoboken, 1976).
Holler, J. & Wilkin, K. Communicating common ground: how mutually shared knowledge influences speech and gesture in a narrative task. Lang. Cogn. Process. 24, 267–289 (2009).
Hostetter, A. When do gestures communicate? A meta-analysis. Psychol. Bull. 137, 297–315 (2011).
Grahe, J. E. & Bernieri, F. J. The importance of nonverbal cues in judging rapport. J. Nonverbal Behav. 23, 253–269 (1999).
Bente, G., Eschenburg, F. & Aelker, L. Effects of simulated gaze on social presence, person perception and personality attribution in avatar-mediated communication. In: Proceedings of the 10th Annual International Workshop on Presence (2007).
Garau, M. et al. The impact of avatar realism and eye gaze control on perceived quality of communication in a shared immersive virtual environment. In: Proceedings of the SIGCHI Conference on Human Factors in Computing Systems 529–536 (2020).
Peña, J. & Hancock, J. An analysis of socioemotional and task communication in online multiplayer video games. Commun. Res. 33, 92–109 (2006).
Walther, J. B., Anderson, J. F. & Park, D. W. Interpersonal effects in computer-mediated interaction: a meta-analysis of social and antisocial communication. Commun. Res. 21, 460–487 (1994).
Reeves, B., Yeykelis, L. & Cummings, J. J. The use of media in media psychology. Media Psychol. 19, 49–71 (2016).
Waltemate, T., Hülsmann, F., Pfeiffer, T., Kopp, S., & Botsch, M. Realizing a low-latency virtual reality environment for motor learning. In Proceedings of the 21st ACM Symposium on Virtual Reality Software and Technology 139–147 (2015).
IEEE Standard for a precision clock synchronization protocol for networked measurement and control systems. In IEEE Std 1588-2008 (Revision of IEEE Std 1588-2002) 1–300 (2008).
Jansen, J., & Bulterman, D. C. User-centric video delay measurements. In Proceedings of the 23rd ACM Workshop on Network and Operating Systems Support for Digital Audio and Video 37-42 (2013).
Tam, J., Carter, E., Kiesler, S., & Hodgins, J. Video increases the perception of naturalness during remote interactions with latency. In CHI'12 Extended Abstracts on Human Factors in Computing Systems 2045–2050 (2012).
Acknowledgements
This work was partially supported by two National Science Foundation (https://www.nsf.gov/) Grants, IIS-1800922 and CMMI-1840131.
Author information
Authors and Affiliations
Contributions
Study was conceptualized by C.O.K. and J.B.; experiment was designed by C.O.K. and J.B.; funding and resources were acquired by J.B.; experiment was implemented/executed by C.O.K. and programmed by D.K.; data preparation and analysis were conducted by C.O.K. and D.K.; original draft of paper was written by C.O.K.; F.H. and J.B. provided comments and edited the original draft. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1: Facial movements tracked by Apple iPhone55
Apple blendshapes | Description |
|---|---|
browDownLeft | Downward movement of outer portion of left eyebrow |
browDownRight | Downward movement of outer portion of right eyebrow |
browInnerUp | Upward movement of inner portion of left and right eyebrows |
browOuterUpLeft | Upward movement of outer portion of left eyebrow |
browOuterUpRight | Upward movement of outer portion of right eyebrow |
cheekPuff | Outward movement of both cheeks |
cheekSquintLeft | Upward movement of cheek around and below the left eye |
cheekSquintRight | Upward movement of cheek around and below the right eye |
eyeBlinkLeft | Closure of the eyelid over the left eye |
eyeBlinkRight | Closure of the eyelid over the right eye |
eyeLookDownLeft | Movement of the left eyelid consistent with a downward gaze |
eyeLookDownRight | Movement of the right eyelid consistent with a downward gaze |
eyeLookInLeft | Movement of the left eyelid consistent with an inward gaze |
eyeLookInRight | Movement of the right eyelid consistent with an inward gaze |
eyeLookOutLeft | Movement of the left eyelid consistent with an outward gaze |
eyeLookOutRight | Movement of the right eyelid consistent with an outward gaze |
eyeLookUpLeft | Movement of the left eyelid consistent with an upward gaze |
eyeLookUpRight | Movement of the right eyelid consistent with an upward gaze |
eyeSquintLeft | Contraction of the face around the left eye |
eyeSquintRight | Contraction of the face around the right eye |
eyeWideLeft | Widening of the eyelid around the left eye |
eyeWideRight | Widening of the eyelid around the right eye |
jawForward | Forward movement of the lower jaw |
jawLeft | Leftward movement of the lower jaw |
jawOpen | Opening of the lower jaw |
jawRight | Rightward movement of the lower jaw |
mouthClose | Closure of the lips independent of jaw position |
mouthDimpleLeft | Backward movement of the left corner of the mouth |
mouthDimpleRight | Backward movement of the right corner of the mouth |
mouthFrownLeft | Downward movement of the left corner of the mouth |
mouthFrownRight | Downward movement of the right corner of the mouth |
mouthFunnel | Contraction of both lips into an open shape |
mouthLeft | Leftward movement of both lips together |
mouthRight | Rightward movement of both lips together |
mouthLowerDownLeft | Downward movement of the lower lip on the left side |
mouthLowerDownRight | Downward movement of the lower lip on the right side |
mouthPressLeft | Upward compression of the lower lip on the left side |
mouthPressRight | Upward compression of the lower lip on the right side |
mouthPucker | Contraction and compression of both closed lips |
mouthRollLower | Movement of the lower lip toward the inside of the mouth |
mouthRollUpper | Movement of the upper lip toward the inside of the mouth |
mouthShrugLower | Outward movement of the lower lip |
mouthShrugUpper | Outward movement of the upper lip |
mouthSmileLeft | Upward movement of the left corner of the mouth |
mouthSmileRight | Upward movement of the right corner of the mouth |
mouthStretchLeft | Leftward movement of the left corner of the mouth |
mouthStretchRight | Rightward movement of the right corner of the mouth |
mouthUpperUpLeft | Upward movement of the upper lip on the left side |
mouthUpperUpRight | Upward movement of the upper lip on the right side |
noseSneerLeft | Raising of the left side of the nose around the nostril |
noseSneerRight | Raising of the right side of the nose around the nostril |
tongueOut | Extension of the tongue |
Appendix 2: Technical setup details
VR chat application (face and body tracker)
The face tracker was implemented as an iOS application running on an iPhone XS. Apple’s ARKit 2.0 SDK, which is built into the iPhone XS, was used to extract tracking status, continuous facial features, and rotation data of the eyes and head. All facial features as well as eye rotation were mapped to the corresponding blendshapes of the avatar head model.
While both the iPhone and Kinect can track head rotation, we found the iPhone data to be more reliable. As such, the head rotation provided by the iPhone XS was used as the primary input data for avatar animation; the head rotation data provided by the Kinect was used as a fallback for instances wherein the iPhone XS failed to track the participant. The face model used for the avatar in the study was Mateo 3D model by Faceshift, licensed under Creative Commons Attribution 3.0. For the female avatar, the same model was used, but the hair was created separately by our lab.
The VR Chat Application was implemented as a Unity application running on a Windows PC and includes the body tracker, and experiment overlay. It includes the body tracker which uses the Kinect for Windows SDK 2.0 and the corresponding Unity plugin. The body model used in the study was AJ 3D Model by Mixamo (Adobe Systems). All Kinect joints from spine base and upward were mapped to the model depicted in Fig. 2. While the Kinect reports joint rotation, we found that this performed poorly on arm joints and therefore rotation data were only used for spine joints. Arm, hand and shoulder joint rotation was inferred using inverse kinematics. A detailed list of the software programs used in the current study is as follows:
Software | Version |
|---|---|
Unity | 2018.1.6f1 |
Kinect for Windows SDK | 2.0.1410.19000 |
iOS on iPhone XS | 12.1 |
protobuf | 3.1.0 |
python | 3.7.4 |
numpy | 1.16.4 |
pandas | 0.24.2 |
sklearn | 0.21.3 |
Control panel
The control panel was implemented as a Unity application running on a Windows PC. It allows the Experimenter to monitor the tracking and connection status of all trackers. It was also used to configure, calibrate, start, record responses, pause, resume and conclude the experiment. A diagram of how the body and face tracking data were processed can be seen in Fig. 13 and a network diagram of the connections between the devices is available in Fig. 14.

Sequence chart of how body and face tracking data were processed.

Network diagram of the connections between the devices.
Appendix 3: Latency assessment for experimental setting
System latency was computed based on the latency of the subsystems. The latency of each individual component is listed in the table below. ARKit provides a capture timestamp, which was used to measure capture delay throughout the study. As the Kinect lacks this feature, we relied on previous research by Waltemate and colleagues98. We observed network latency and variance for the face trackers that we connected via wireless network. In order to achieve the required time synchronization between trackers, we timestamped a message when captured, sent, received and rendered, and use a time synchronization approach99 to calculate time offset and network delay. The rolling average and standard deviation of the calculated latencies were logged every second. We calculate the render delay as the difference between the time the data is received and the time when Unity completed rendering the frame.
While 100 ms is established as a safe latency that ensures user satisfaction in video conferencing100, a more recent study101 suggests that latencies as high as 500 ms do not have a significant negative impact on likeability and naturalness. Of note, there were no complaints regarding system performance during the pilot study with 40 participants, which is expected as our total latency was within the established target range. In addition to the approach taken in the present study, future studies may also benefit from conducting a video-based assessment in order to determine motion-to-photon latencies.
Body tracking | Face tracking | |
|---|---|---|
Sensor/capture delay | 98.8 ± 19.2 ms | 84.8 ± 9.0 ms |
Network stream latency | < 1 ms | 8.5 ± 33.9 ms |
Render delay | 30.4 ± 10.9 ms | |
Display response delay | 8 ms* | |
Total | 138.2 ± 22.1 ms | 131.7 ± 36.7 ms |
Appendix 4: Measures for social presence, interpersonal attraction, and impression accuracy (BFI-S)
Social presence74,75
How strongly do you agree or disagree with the following statements about your partner?
1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|
Strongly disagree | Disagree | Somewhat disagree | Neither agree nor disagree | Somewhat agree | Agree | Strongly agree |
-
1.
I felt that my partner was present.
-
2.
I felt that my partner was aware of my presence.
-
3.
I paid close attention to my partner.
-
4.
My partner paid close attention to me.
-
5.
I was influenced by my partner's emotions.
-
6.
My partner was influenced by my emotions.
-
7.
My thoughts were clear to my partner.
-
8.
My partner's thoughts were clear to me.
Interpersonal attraction62, 63
Task attraction
How strongly do you agree or disagree with the following statements about your experience?
1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|
Strongly disagree | Disagree | Somewhat disagree | Neither agree nor disagree | Somewhat agree | Agree | Strongly agree |
-
1.
I enjoyed completing the tasks with my partner.
-
2.
I had fun completing the tasks with my partner.
-
3.
I would like to interact with my partner again.
-
4.
It was interesting to complete the tasks with my partner.
Social attraction
How strongly do you agree or disagree with the following statements about your partner?
1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|
Strongly disagree | Disagree | Somewhat disagree | Neither agree nor disagree | Somewhat agree | Agree | Strongly agree |
-
1.
I like my partner.
-
2.
I would get along well with my partner.
-
3.
I would enjoy a casual conversation with my partner.
-
4.
My partner is friendly.
Impression Accuracy (Short 15-item big five inventory; BFI-S70,71)
BFI-S observer version
You will now see a number of statements, each of which starts with, "I see MY PARTNER as someone who…". For each statement, indicate how much you agree or disagree with this. If you are unable to make a judgment, select "Cannot make judgment".
1 | 2 | 3 | 4 | 5 | 6 | 7 | N/A |
|---|---|---|---|---|---|---|---|
Strongly disagree | Disagree | Somewhat disagree | Neither agree nor disagree | Somewhat agree | Agree | Strongly agree | Cannot make judgment |
BFI-S self version
You will now see a number of statements, each of which starts with, "I see MYSELF as someone who…". For each statement, indicate how much you agree or disagree with this.
1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|
Strongly disagree | Disagree | Somewhat disagree | Neither agree nor disagree | Somewhat agree | Agree | Strongly agree |
Trait | Items |
|---|---|
Openness to experience | comes up with new ideas |
values artistic experiences | |
has an active imagination | |
Conscientiousness | does a thorough job |
tends to be lazy | |
does things efficiently | |
Extroversion | is talkative |
is outgoing | |
is reserved | |
Agreeableness | is sometimes rude to others |
has a forgiving nature | |
is kind | |
Neuroticism | worries a lot |
gets nervous easily | |
remains calm in tense situations |
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Oh Kruzic, C., Kruzic, D., Herrera, F. et al. Facial expressions contribute more than body movements to conversational outcomes in avatar-mediated virtual environments. Sci Rep 10, 20626 (2020). https://doi.org/10.1038/s41598-020-76672-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-020-76672-4
This article is cited by
-
A randomised controlled test of emotional attributes of a virtual coach within a virtual reality (VR) mental health treatment
Scientific Reports (2023)
-
Towards smart glasses for facial expression recognition using OMG and machine learning
Scientific Reports (2023)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
