
Abstract
The formation of groups of interacting individuals improves performance and fitness in many decentralised systems, from micro-organisms to social insects, from robotic swarms to artificial intelligence algorithms. Often, group formation and high-level coordination in these systems emerge from individuals with limited information-processing capabilities implementing low-level rules of communication to signal to each other. Here, we show that, even in a community of clueless individuals incapable of processing information and communicating, a dynamic environment can coordinate group formation by transiently storing memory of the earlier passage of individuals. Our results identify a new mechanism of indirect coordination via shared memory that is primarily promoted and reinforced by dynamic environmental factors, thus overshadowing the need for any form of explicit signalling between individuals. We expect this pathway to group formation to be relevant for understanding and controlling self-organisation and collective decision making in both living and artificial active matter in real-life environments.
Similar content being viewed by others

Introduction
Strength in numbers is more than an idiomatic expression. Many living systems form groups to improve their fitness, optimise the use and allocation of resources, and reach consensus1. Examples emerge at all length scales, from bacterial quorum sensing and biofilm formation2 to social insects3, from animal groups4 to human crowds5. Artificial active matter systems, such as active colloids6 and robotic swarms7, provide controllable systems to pinpoint the essential principles behind the emergence of these collective behaviours in living systems8,9. For example, active colloids have been employed to demonstrate motility-induced phase separation10,11 as well as the spontaneous formation of living crystals resembling animal group formation8,12. Complex dynamic collective patterns, such as colloidal swarms, flocks and swirls, have also been demonstrated by introducing controllable attractive, repulsive or aligning interactions among individuals by particle design13,14, by defining appropriate confining potentials15 or by modulating particles’ propulsion with external feedback loops9,16. In recent years, a few active particles in crowded environments of passive colloids have also been employed to modulate the energy landscape of the passive phase with an emphasis on controlling the assembly of soft materials17,18,19,20,21,22,23,24,25.
Whether living or artificial, decentralised systems are characterised by high-level coordination and collective behaviours, which emerge from individuals with limited information-processing capabilities responding to low-level rules of engagement26. In particular, stigmergy is a form of indirect communication between individuals by means of the environment, either mediated by physical modifications (sematectonic stigmergy) or by a signalling mechanism via deposition of markers (marker-based stigmergy) which shape a shared environmental memory27. This strategy underpins the emergence of coordination and collective decision-making in many natural decentralised systems, from micro-organisms2 to social insects3. For example, trailing stalk cells guided by chemo-attractants through tissue establish the vascular lumen in sprout angiogenesis28; bacteria29, amoebas30 and ants31 can solve physical mazes by tracking chemical scents and forming optimal paths; mutual anticipation and avoidance in crowds lead to lane formation and stabilisation32. The concept of stigmergy has also found widespread use in technological and engineering applications, from robotic swarms33 to artificial intelligence algorithms7, to, recently, active colloids34. In these systems, it is usually assumed that individuals possess a minimal level of low-level communication and signal processing capabilities, which leads to the emergence of shared environmental memory and, eventually, high-level group dynamics27.
Here, we demonstrate that, even in a community of clueless self-motile individuals (i.e., incapable of directly signalling to each other or processing information), avoidance of a dense population of non-fixed obstacles is sufficient to lead to the emergence of stigmergy when the dynamic environment can transiently store memory of the earlier passage of individuals. Counterintuitively, we find that, while the motion of the individuals is hampered by increasing levels of crowding, the spatial correlations created and stored in the otherwise passive environment after their passage feed back on the motion of other individuals to boost aggregation rates and, consequently, group formation.
Results
Group formation experiments
As paradigmatic self-motile individuals, we employ Janus silica (SiO2) colloids (diameter d = 4.77 ± 0.20 μm) half-coated with a thin layer of carbon ( ≈ 60 nm) (Methods). When suspended in a critical binary mixture of water and 2,6-lutidine (0.286 mass fraction of lutidine) below its lower critical temperature (Tc ≈ 307 K), these colloids undergo Brownian diffusion35. Upon exposure to laser illumination (λ = 532 nm, I ≈ 2.5 μW μm−2) (Methods), light absorption at the carbon cap simultaneously propels the Janus particles in the field of view with the more hydrophobic carbon-coated side at the front at a speed of v ≈ 1.9 μm s−1 due to local heating and demixing of the critical mixture around the cap35. Our experiments are in the Stokes regime (Reynolds numbers, \({{{{{{{\rm{Re}}}}}}}}\, \approx \,1{0}^{-5}\, \ll \,1\)) and inertial effects, including those of the fluid36,37, can be safely neglected. Because of their colloidal nature, these self-motile individuals are clueless in the sense that they have no sensing or information-processing capabilities and interact with each other through simple physical interaction rules, such as steric and short-range attractive interactions8,10,38. Boundaries can also influence their motion with aligning interactions39,40.
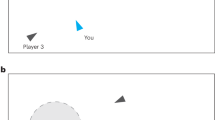
To study their interplay with a dynamic environment of non-static obstacles, we prepare quasi-two-dimensional samples of Janus particles mixed with dispersions of equally sized freely diffusing silica (SiO2) colloids at different densities (0 ≤ ρp ≤ 75%, defined as fractional surface coverage), where the Janus particles only represent a small portion (0.5% ≤ ρa ≤ 1.6%, also defined as fractional surface coverage) (Methods). The two example time sequences of active particles (ρa = 1.1%) moving in a crowded environment (ρp = 37.5%) in Fig. 1 and Supplementary Fig. 1 show how the changes introduced in the passive phase by the active colloids produce spatial correlations in the environment in the form of open transient paths. These paths feedback on the motion of the active particles, eventually leading to group formation (here defined as the formation of a cluster of at least three particles separated by at most 0.1d from another particle and surviving for at least one frame). While moving forward, individual Janus particles need to physically dig their own path against the surrounding background of passive colloids (Fig. 1a and Supplementary Fig. 1a). Although the presence of voids in the background of passive particles can simplify this task at times, their overall motility reduces for increasing values of ρp as exemplified by the mean square displacements (MSDs) in Supplementary Fig. 2. Unless pushed by a Janus particle, the motion dynamics of the passive particles remain diffusive at the edges of the transient paths (Fig. 1a and Supplementary Fig. 1a). Interestingly, before closing due to the Brownian motion of the passive colloids, these paths appear to be reused by other active colloids, which favour reusing these preformed paths of lower resistance from either end rather than digging their owns (Fig. 1b and Supplementary Fig. 1b). A form of stigmergy (consistent with the definition of sematectonic stigmergy27) between the active particles is then established thanks to their passive counterparts, where the transient paths opened by the active colloids in their surroundings become a shared environmental memory for their peers, which generates a feedback that reinforces their trailing behaviour and, eventually, leads to group formation. Indeed, over time, the trailing Janus colloids catch up with the front particles (Fig. 1c and Supplementary Fig. 1c) to form a small cluster (Fig. 1d and Supplementary Fig. 1d). Once formed, these clusters then grow to larger sizes due to the continuous addition of new active particles to the group through a network of similar transient open paths that form and evolve over time (Fig. 1e). As in other cases of sematectonic stigmergy27, therefore, the modifications introduced by the active particles in their physical environment (here, the formation of a path in the background of passive colloids) act as asynchronous cues directing the next steps of other particles (here, changing their direction of motion) in a way that provides a direct contribution to the task (here, the carving, reuse and stabilisation of the paths) and facilitates the emergence of population-level coordination (here, group formation).

a–d Time sequence showing (a) a light-activated Janus particle (cyan) forming a path in a crowded environment of SiO2 passive particles (densities: ρa = 1.1% for active particles and ρp = 37.5% for passive particles), b, c which is then reused by nearby Janus particles (yellow and magenta) leading to (d) the formation of a group (here, a three-particle cluster). In each image, 20-s-long trajectories are shown for both active (red colour scale) and passive (blue colour scale) particles; t represents the time of each frame and τ the time along each trajectory. Scale bar: 10 μm. e Counts Ca (represented as a heatmap) of individual Janus particles that have transited on a pixel during a 16-min acquisition in a similar crowded environment as in a–d. The heatmap is overlaid to the final frame showing how path generation and reuse (bright lines) correlate to group formation and cohesion of active units in time (white dashed circles). The heatmap was obtained from a sample with ρa = 1.1% and ρp = 37.5% and an occupied pixel was only accounted for once for each particle. Scale bar: 25 μm.
Figure 2a shows examples of the largest groups obtained after 25 min of experimental time for different values of ρa and ρp. Independently of ρa, the largest groups appear to form for intermediate values of ρp, where the crowding is sufficient to create a shared memory in the environment in the form of reusable transient paths, but not dense enough to completely hamper the motility of the individual Janus particles. To quantify this observation, we calculated the size of the largest cluster \({C}_{\max }\) (Fig. 2b), the total number of groups Ng (Fig. 2c) and the average number of particles per group (Fig. 2d) for different values of ρa as a function of ρp. At ρp = 0, no group forms at a low density of active particles (ρa = 0.5%) as encounters are sparse, while the formation of a very few groups (up to ≈ 2) becomes increasingly more likely for higher values of ρa, as chances for encounter increase with the number of available individuals. Increasing ρp to intermediate values leads to the formation of more groups on average (for example, up to ≈ 5 at 37.5%, Fig. 2c). The average size of these groups also shows a tendency to increase for a given ρa until a peak is reached around intermediate values of ρp (Fig. 2d). Both the exact position of this peak and its width depend on ρa: the peak is higher, broader, and shifted towards lower values of ρp, the higher ρa (Fig. 2d). This is also reflected by the trend observed for \({C}_{\max }\) (Fig. 2b). Indeed, as chances for encounter increase with the number of available active particles, individuals become more efficient at creating and reusing correlations in their environment through the transient paths, thus lowering the density threshold needed for the passive phase to promote group formation with increasing ρa. At the peak, a larger cluster tends to emerge (Fig. 2b) that can contain up to ≈ 67% of the particles in a group (npg) due to the shared environmental memory from the path reuse highlighted in Fig. 1 and Supplementary Fig. 1. This effect is more prominent the higher the value of ρa. The path reuse by the Janus particles can be quantified through the path revival function 1 − Caa(τ), where Caa(τ) is the cumulative probability that a region crossed by an active particle will be crossed by another particle within a lag time τ (Methods). If we consider the particles’ velocities to be Poisson distributed when a path is chosen, then this function should follow an exponential distribution for persistent particles of the form \(1-{C}_{{{{{{{{\rm{aa}}}}}}}}}(\tau )=\exp (-\tau /{\tau }_{{\rho }_{{{{{{{{\rm{p}}}}}}}}}})\)41, where \({\tau }_{{\rho }_{{{{{{{{\rm{p}}}}}}}}}}\) is the effective path revival lifetime, which we fit from the data (Supplementary Fig. 3). The shorter \({\tau }_{{\rho }_{{{{{{{{\rm{p}}}}}}}}}}\), the faster 1 − Caa(τ) decays (i.e., the faster Caa(τ) increases to one), the sooner a region explored by a particle will be crossed by another particle, thus indicating a higher likelihood that a previously opened path will be reused by other active particles. Supplementary Fig. 3a shows how, in our experiments, after initial comparable trends at lower values of ρp (ρp ≤ 25%), the decay of the path revival function becomes faster starting from intermediate values of ρp (quantified by an approximately factor-two reduction of the path revival lifetime \({\tau }_{{\rho }_{{{{{{{{\rm{p}}}}}}}}}}\) in Supplementary Fig. 3b), thus indicating a higher likelihood of reusing previously explored regions. This change of the path revival lifetime with ρp is unexpected and can only by justified by the emergence of a shared environmental memory due to the reuse of pre-existing paths. In fact, if we consider collisions between persistent particles whose velocities are Poisson distributed41, we would expect the lifetime of the path revival function \({\tau }_{{\rho }_{{{{{{{{\rm{p}}}}}}}}}}\) to increase with ρp as the particles’ effective velocity decreases due to the collisions with the passive particles (as confirmed by the MSDs in Supplementary Fig. 2). Eventually, further increasing ρp has a dramatic effect on group formation, as the reduced motility for the active colloids due to the resistance offered by the passive particles (Supplementary Fig. 2) induces a more intuitive behaviour where group formation and cohesion are drastically hampered by the crowded environment and any reduction of the path revival lifetime with respect to the case at ρp = 0% (Supplementary Fig. 3) is now driven by the active particles being more localised in space due to crowding rather than the presence of longer-range correlations in the form of transient paths. For a given ρa, the ever-increasing number of groups Ng with ρp (Fig. 2c) translates now into smaller groups of more homogeneous sizes and more localised in space, which, differently from Ng, show a milder dependence on the initial value of ρa (Fig. 2b, d).

Groups (here defined as all clusters formed by at least 3 individuals) formed after 25 min as a function of the initial densities of active (ρa) and passive (ρp) particles. a Example images of the largest clusters of active colloids formed at different ρa and ρp. Independent of ρa, these images show how the largest sizes are obtained at intermediate values of ρp. Scale bar: 20 μm. b This visual trend is confirmed by the non-monotonic dependence of the average size \({C}_{\max }\) of the largest clusters (measured as number of active particles) as a function of ρp for different values of ρa. c Differently from \({C}_{\max }\), the total number of groups Ng tends to monotonically increase with ρp. The error bars in b and c represent one standard error around the average values obtained from triplicates. d Average number of active colloids in a group after 25 min calculated as the ratio between the number of particles in a group npg and the number of groups Ng. The error bars in d are obtained by propagating the standard errors on npg and Ng. Source data are provided as a Source Data file.
Mechanism behind stigmergy of clueless active colloids
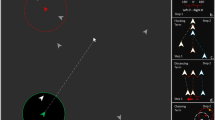
To shed light on the physical mechanism behind the reuse of paths in Fig. 1 and Supplementary Fig. 1, Fig. 3a, b shows a close-up of the motion of a Janus particle in the background of passive particles. At t = 24 s (Fig. 3a), the particle approaches a block of relatively packed obstacles. On approaching one of them, it turns clockwise towards a void in the structure formed by the passive colloids instead of pushing ahead. At t = 34 s, the Janus particle approaches two obstacles head-on via their middle, thus pushing them out of the way and continuing its journey towards a pre-existing path (Fig. 3b). Interestingly, the particle does not align with this path until it encounters a new block of relatively packed obstacles (t = 47 s). At this point, a new reorientation event turns it counter-clockwise, thus aligning the particle’s motion to the open path (t = 58 s) and allowing its reuse. To interpret these reorientation events, we need to consider how the presence of the obstacles affects the particle’s self-propulsion mechanism. In their absence, light absorption at the particle’s carbon cap induces the local demixing of the water–2,6-lutidine critical mixture, leading to the formation of a lutidine-rich droplet around the more hydrophobic carbon side and of a smaller water-rich droplet around the more hydrophilic silica side35,42. The formation of these droplets, which propels the particle35,42, is mostly symmetric around the axis defined by the direction of the particle’s motion, and the particle’s reorientation in a viscous medium is driven by its intrinsic rotational diffusion dynamics35,42. If obstacles are present on one side, the local demixing is no longer symmetric around the direction of the particle’s motion. This asymmetry induces a deterministic aligning torque that reorients the particle towards the more demixed side, i.e., eventually away from the obstacles42. As can be seen in Fig. 3a, b, this reorientation (and, hence, the presence of the torque) depends on the local configuration of obstacles and continues until the particle is aligned in a direction where the demixing around the caps is symmetric again and the aligning torque vanishes (for example, along an open path). To quantify the previous observation, we have calculated the angle δ at which the Janus colloids are deflected by their interaction with the obstacles (Fig. 3c). Positive and negative δ values indicate that the particles are deflected initially away from or towards the obstacles, respectively. When steering away from the obstacles (positive δ), we can then expect the particles to immediately align to openings in the background of passive particles, while deflections towards the obstacles (negative δ) would initially increase chances of collisions with the obstacles until the particle digs a new path or aligns to an existing one. The distribution of angles in Fig. 3c is peaked at positive δ values (as highlighted by the Gaussian fit centred at δ ≈ 0.23 rad), thus quantitatively confirming the stronger tendency for active particles to avoid obstacles and align to open paths already on approach.

a, b Time sequence of a light-activated Janus particle experiencing a torque that aligns it to openings in a crowded environment at a density of SiO2 passive particles of ρp = 37.5%. The effect of this torque on the particle’s trajectory is evident in the frames at a t = 34 s and b t = 58 s, where the particle has turned clockwise (towards a void in the structure formed by the passive colloids) and counter-clockwise (towards an open path), respectively. In each image, 24-s-long trajectories are shown for both active (red colour scale) and passive (blue colour scale) particles; t represents the time of each frame and τ the time along each trajectory. Scale bar: 10 μm. c Probability P(δ) that a Janus particle moving at a velocity v is deflected by an angle δ from its direction of approach to an obstacle due to a torque Ω (inset). The deflection angle δ is defined between the active particle’s direction of approach to the obstacle (at a distance between the two particles' surfaces equal to one diameter d) and its direction of motion after having passed it (after travelling a 2d distance); we calculated δ at low density of passive particles (ρp = 12.5%) to primarily consider interactions with single obstacles for active particles' approaches within a narrow angular cone (±π/8 excluding near head-on approaches, which contribute symmetrically around δ = 0). Positive δ values indicate deflection away from the obstacles (as shown in the inset), while negative δ values indicate initial deflections towards the obstacles. The solid line is a Gaussian fit (centred at δ ≈ 0.23 rad, dashed vertical line) around the position of the peak. Source data are provided as a Source Data file.
To gain a microscopic understanding of the non-monotonic dynamics of group formation in Fig. 2b, we can therefore consider a simple particle-based model that includes an aligning torque, which depends on the local configuration of obstacles (Methods)43, in the equations of motion of the active particles. The effect of this torque is to steer the active particles away from the surrounding passive ones and align their direction of motion to any effective boundary of a transient path39,40. Figure 4a shows how the presence of this aligning torque is already fundamental to reproduce the overall dependence of the experimental path revival lifetime \({\tau }_{{\rho }_{{{{{{{{\rm{p}}}}}}}}}}\) on ρp, indicating that obstacle avoidance is indeed the mechanism that promotes active particles to follow previously formed transient paths. In fact, in the absence of the torque, the path revival lifetime increases with ρp as one would intuitively expect due to the decrease of the particles’ effective velocity caused by collisions with the obstacles41. Fitting our experimental data to our model allows us to determine the strength of the torque to be Ω0 = 72 ± 16 kBT. As shown in Fig. 4b, the presence of this torque is also critical to recovering the non-monotic dependence of the largest group size with ρp as observed in our experimental data (Fig. 2b). Therefore, this torque and the resulting aligning interaction provide an enabling mechanism for the emergence of stigmergy via a shared environmental memory in the system of non-communicating active particles by allowing the spatial correlations in the environment to feed back on their motion. Figure 4b also confirms that the non-monotonic dynamics of group formation depend on the number of individuals (as already observed in Fig. 2b). At higher values of ρa, encounters become more probable so that groups can form and grow to larger sizes at lower values of ρp. As groups grow to larger sizes, there is a decrease in the density of passive particles needed to cage them and prevent them from merging into even larger groups. The combination of these two effects translates into a decreasing monotonic dependence of the peak position on ρa (Fig. 4c), highlighting the relevance of environmental memory effects for group formation in sparse systems of clueless active particles. Figure 4d–f shows example snapshots from the simulations, which confirm our qualitative observations in Fig. 2: at low values of ρp (Fig. 4d), groups of a few units are formed; at intermediate values of ρp (Fig. 4e), the landscape is dominated by a very few large groups that collect most of the active particles; finally, at large values of ρp (Fig. 4f), a few relatively smaller groups of more homogeneous size appear to be caged within the crowded environment.

a Path revival lifetime \({\tau }_{{\rho }_{{{{{{{{\rm{p}}}}}}}}}}\) as a function of the density of passive particles ρp in experiments for a density of active particles ρa = 1.1% (orange solid line) and in simulations with (black solid line) and without (grey dotted line) an effective aligning torque steering the active particles away from the passive ones. The torque Ω (with strength Ω0 = 72 ± 16 kBT) depends on the local configuration of obstacles (Methods) and is necessary to reproduce the overall experimental trend. The data from Supplementary Fig. 3 are here normalised to τ0, the path revival lifetime at ρp = 0. b Simulated average size \({C}_{\max }\) of the largest group for different ρa as a function of ρp in the presence (coloured solid lines) and absence (grey dotted line) of an aligning torque, showing that the torque is key to the appearance of a peak at intermediate values of ρp (as in Fig. 2b). c The value of ρp at the peak position (\({\rho }_{\max }\)) as a function of ρa provides a second estimate for the experimental torque strength (Ω0 = 72 ± 16 kBT). Its monotonously decreasing trend is visualised by a dashed line as a guide for the eyes. Each experimental data point in a and c is obtained as an average from three videos at the corresponding values of ρa and ρp and simulations in a–c are averages over 100 numerical experiments per value of ρa and ρp. All error bars represent one standard error around the average values. d–f Example snapshots from simulations showing group formation of active particles (red, ρa = 1.1%) at different densities of passive particles: d ρp = 5%, e ρp = 30% and f ρp = 70%. Scale bar: 40 μm. Source data are provided as a Source Data file.
Kinetic model of group formation
To further understand how the shared environmental memory affects encounter dynamics, we can define a kinetic model based on mean-field rate equations for the number density of monomers (free active particles, i.e., not part of a group) c1 and for the number density of groups cg as
where αmm, αmg and αgg are the rate coefficients of monomer–monomer, monomer–group and group–group aggregation (Methods). Rate equations are indeed a powerful tool to understand the emergence of group dynamics and self-assembly in systems of multiple units, as much as in chemical kinetics44 and colloidal science12 as in swarm robotics45,46. In Eq. (1), monomers disappear due to the formation of a new group from two monomers (first term, Fig. 5a) or due to the growth of an existing group by addition of a new monomer (second term, Fig. 5b). Similarly, in Eq. (2), cg can change due to the formation of a new group from monomers (first term, Fig. 5a) or from the merging of two existing groups (second term, Fig. 5c). In all cases, we assume that the rate of encounters is proportional to the product of the number densities of the species involved (either monomers or groups) and that any dependence on the effective cross-sectional area of each species is accounted for by the effective rates of aggregation αmm, αmg and αgg. Without a shared environmental memory, these rates should only depend on the effective diffusion coefficients of the species involved47. The larger the effective diffusion coefficient, the faster the rate of group formation and growth, leading to larger groups within the same time interval. Nonetheless, our experimental results suggest that the effective diffusion coefficients decrease with ρp (Supplementary Fig. 2), so the augmented group formation for intermediate values of ρp must result from the presence of spatial correlations in the environment that increase the chances for particles to meet, i.e., the reuse of transient paths highlighted in Fig. 1 and Supplementary Fig. 1.

a–c Schematics of the three main mechanisms for the kinetics of group formation described by the relevant rate coefficients αxy: a monomer–monomer (αmm), b monomer–group (αmg) and c group–group (αgg) aggregation. d, e Calculated monomer–monomer (αmm), monomer–group (αmg) and group–group (αgg) aggregation rate coefficients at a density of active particles ρa = 1.1% as a function of the density of passive particles ρp (d) in the presence of an aligning torque and (e) in its absence. Simulations were averaged over 100 numerical experiments per value of ρp. Error bars represent one standard error around the average values. Source data are provided as a Source Data file.
By calculating the effective rate coefficients (αmm, αmg and αgg) from the simulated data, we can assess the relative importance of monomer–monomer, monomer–group and group–group aggregation on the kinetics of group formation (Fig. 5d). Both αmg and αgg present a maximum for intermediate values of ρp when group formation is enhanced, while αmm is roughly constant in comparison. In the presence of passive particles, although monomer–monomer aggregation is key for the formation of the initial groups, the kinetics are dominated by groups catalysing their own growth through the addition of new monomers and merging with other existing groups. These aggregation events mediated by the presence of the shared environmental memory are hence behind the enhanced group formation observed at intermediate ρp. Indeed, when the aligning torque is switched off in simulation (Fig. 5e), the shared memory and stigmergy cannot develop (Fig. 4), resulting in aggregation rates that decay monotonically with increasing values of ρp, as one would expect when an increased number of obstacles hinders diffusion (Supplementary Fig. 2).
Discussion
In summary, our results demonstrate how, in a decentralised system composed of clueless active units with no explicit signalling pathway or information-processing capability, a dynamic environment can create the conditions for the emergence of a shared environmental memory that can coordinate and shape the system’s collective response. Hence, confinement by crowding becomes a condition sufficient for self-organisation to emerge and to activate the system’s coordination capabilities (e.g., by naturally evolving to larger groups)48. In our experiments, the physical mechanism behind the emergence of these population dynamics is the aligning torque acting on the Janus particles due to the asymmetric demixing of the water–2,6-lutidine critical mixture caused by the presence of the non-fixed obstacles. Other physical mechanisms (e.g., electrostatic interactions, phoretic interactions, hydrodynamic coupling39 or, even, sensory perception32,48) can be expected to lead to the emergence of a shared field memory in other systems, which could also be reproduced in a coarse-grained manner by introducing an effective aligning torque in their motion dynamics. Indeed, similar mechanisms of shared memory which are primarily promoted and reinforced by dynamic environmental factors could also contribute to shaping the collective dynamics of other decentralised systems where individuals can instead actively signal to each other27, such as communities of micro-organisms2,29, social insects3,31 and robotic swarms4,7. The feedback from the environment could then lower the threshold for quorum formation in natural communities2 and for reaching consensus in decision-making processes26, e.g., by synergistically catalysing any pathway of explicit communication. Finally, we envisage that shared memories promoted by environmental dynamic features could become design factors to implement low-level rules to drive high-level self-organisation in artificial systems, including in the design of antimicrobial surfaces, of crowd management control tools, and of neuromorphic computers and artificial swarm intelligence48.
Methods
Materials
Glass microscopy slides (Thermo Fisher) were purchased from VWR while glass coverslips were purchased from Thorlabs. The following chemicals were purchased and used as received: 2,6-lutidine (≥99%, Sigma-Aldrich), acetone (≥99.8%, Sigma-Aldrich), ethanol (≥99.8%, Fisher Scientific), sodium hydroxide (NaOH, Fisher Scientific). Deionised (DI) water (≥18 MΩ.cm) was collected from a Milli-Q purification system. Aqueous colloidal dispersions (5 % w/v) of silica (SiO2) colloids for sample preparation (4.77 ± 0.20 μm in diameter for Janus particle fabrication and as passive colloids; 7.00 ± 0.15 μm in diameter as spacers) were purchased from Microparticles GmbH. Carbon rods of length 300 mm and diameter 6.15 mm for coating Janus particles by sputtering were purchased from Agar Scientific and cut to a length of 50 mm before use. Lens tissue for slide cleaning was purchased from Thorlabs. UV cure adhesive (Blufixx) and hydrophobic coating (RainX) for sample preparation were purchased from an online retailer (Amazon).
Slide cleaning protocol
Before their use for sample preparation, glass slides and coverslips were cleaned by wiping them with acetone-soaked lens tissue. RainX (a commercial solution which renders glass surfaces more hydrophobic and aids in limiting particles sticking to the glass chamber) was then smeared on both with a cotton bud and gently dried with a nitrogen gun. After 2 min, excess RainX was removed by wiping with acetone-soaked lens tissue. Glass slides for the deposition of colloidal monolayers were instead cleaned by sonication for 10 min in a 2 M NaOH ethanolic solution followed by three cycles of 5 min sonication in DI water. To dry them, the slides were withdrawn from water in the presence of ethanol vapour (Marangoni drying) and, subsequently, blown dry with a nitrogen gun.
Fabrication of Janus particles
The Janus particles used in our experiments were fabricated from SiO2 colloids of diameter d = 4.77 ± 0.20 μm, which were coated on one side with a thin layer (≈60 nm) of carbon. We first deposited a monolayer of colloids on a clean glass slide. The monolayer was obtained by evaporating a 40 μL droplet containing a 2.5% w/v dispersion of the colloids in DI water. The particles were then coated with a 60 nm thick carbon layer using an automatic carbon coater (AGB7367A, Agar Scientific). The thickness of the carbon layer was confirmed by atomic force measurements (AFM). Post-coating sonication allowed us to dislodge the half-coated particles in DI water from the glass slide to use them for sample preparation.
Sample preparation
Samples were prepared in the form of a quasi-two-dimensional glass chamber filled with a colloidal dispersion in a critical mixture of water–2,6-lutidine. Typical colloidal dispersions include Janus particles as well as passive SiO2 particles and spacers. For example, to achieve a typical dispersion with densities of ρa = 0.5% and ρp = 12.5%, we mixed stock dispersions of the three types of particles in DI water to achieve an aqueous dispersion containing 0.13% w/v of Janus particles, 5% w/v of passive particles and 0.08% w/v of spacers. This concentration of spacers was chosen to minimise their number in the field of view, whilst giving enough support to maintain the quasi-two-dimensional chamber’s geometry. Samples with other densities (ρa and ρp) were obtained by linearly scaling these concentrations of Janus particles and passive particles to obtain the right values of ρa and ρp. Before their use, the colloidal mixtures were centrifuged at 1000 × g for 3 min leaving a pellet; the supernatant was then removed and replaced with a 28.6% w/v water–2,6-lutidine solution. This process was repeated three times to remove residual DI water from the initial dispersion. Experiment-ready quasi-two-dimensional sample chambers containing a dispersion of colloids in a critical water–2,6-lutidine solution were prepared by sandwiching 10 μL of this final dispersion between a clean glass slide and a thin coverslip. The chamber was sealed by applying an ultraviolet-curable adhesive around the edges of the coverslip, which was then exposed to ultraviolet (UV) light for 30 s on each side. Before data acquisition, the sample was left to equilibrate over a 30-min period.
Optical setup and microscopy
All the experiments were performed on an inverted microscope (Leica, DMI4000) equipped with a homemade flow thermostat to maintain the critical suspension at a fixed temperature (T = 30 ∘C) below the critical point (Tc ≈ 34. 1 ∘C). The sample’s field of view was illuminated at once with a green continuous-wave laser (λ = 532 nm) at a power density of 2.5 μW μm−2 to simultaneously propel the Janus particles due to light absorption at the carbon cap35. Both Janus and passive particles were tracked by digital video microscopy49 using the image projected by a microscope objective (×20, NA = 0.5) on a monochrome complementary metal-oxide-semicondutor (CMOS) camera (Thorlabs, DCC1545M) with an acquisition rate of 10 frames per second. The incoherent illumination for the tracking is provided by a white-light-emitting diode (Thorlabs, MWWHLP1) directly projected onto the sample. A long-pass dichroic mirror (Thorlabs, DMLP605) with a 605-nm cut-on wavelength was used to combine laser and white light before the sample, while laser light was removed from the detection path with a notch filter centred at 532 nm (Semrock, NF01-532U-25).
Path revival function
To quantify the path reuse by the Janus particles, we define the path revival function 1 − Caa(τ), where Caa(τ) is the cumulative probability that a region crossed by an active particle will be crossed by another particle within a lag time τ. To compute 1 − Caa(τ) we define a circular region of diameter d around each active particle at a certain time t and measure how many of those regions have been crossed by the centre of another active particle up to lag time τ. If we consider the particles’ velocities to be Poisson distributed when a path is chosen, then this function should follow an exponential distribution for persistent particles41
where \({\tau }_{{\rho }_{{{{{{{{\rm{p}}}}}}}}}}\) is the effective path revival lifetime, which we fit from the data. For both experiments and simulations, we assume that the initial positions in the particles’ trajectories are uncorrelated (i.e., in the experiments, we only consider trajectories of individual particles before groups form and, in the simulations, the short-range attractive interaction between particles is turned off to prevent group formation).
Particle-based simulations
We consider a numerical model where na active spheres and np passive spheres of diameter d move inside a two-dimensional box of side L = 60d with periodic boundary conditions. Both na and np are fixed to match the experimental values of ρa and ρp. As in the experiments, all particles, whether active or passive, have the same size d and mass m.
To map the simulations to the experiments, we consider the same Péclet number defined as,
where d = 4.77 μm, v = 1.9 μm s−1, and Dt = 0.0249 μm2 s−1. Both velocity v and diameter d of the active particles were used to convert the reduced units in simulations to SI units. The translational diffusion coefficient Dt was calculated as
where kB is the Boltzmann constant, T the absolute temperature, and \({\gamma }^{{\prime} }\) is the corrected translational drag coefficient for colloids at distance s from a surface50, given by
with
where μ is the fluid viscosity. We assume 2s = d, T = 303 K, and μ = 2.1 × 10−3 Pa s for the water–2,6-lutidine mixture. Similarly, the rotational diffusion coefficient Dr was calculated as
where \({\beta }^{{\prime} }\) is the corrected rotational drag coefficient for colloids at distance s from a surface50, given by
with
The trajectories of both active and passive particles were obtained by integrating their equations of motion using a velocity Verlet scheme implemented in the large-scale atomic/molecular massively parallel simulator (LAMMPS)51. Specifically, the particles’ translational motion and rotational motion around one single axis (perpendicular to the simulation plane) are respectively described by the following Langevin equations,
and
where vi and ωi are the translational and angular velocity for particle i, \({\hat{{{{{{{{\bf{u}}}}}}}}}}_{i}=(\cos {\theta }_{i},\sin {\theta }_{i})\), \({\omega }_{i}={\dot{\theta }}_{i}\), Fa is the strength of the self-propulsion force for the active particles, τγ is the damping time, I is the particles’ inertia of rotation, Vi is the potential due to the interaction with all surrounding particles, and Ωi is an effective torque due to the interaction of particle i with the surrounding passive particles. \({{{{{{{{\boldsymbol{\xi }}}}}}}}}_{t}^{i}(t)\) and \({\xi }_{r}^{i}(t)\) are stochastic terms taken from a truncated random distribution of zero mean and unitary standard deviation52. Moreover, α is a model parameter that defines the relationship between the rotational (Dr) and translational (Dt) diffusion coefficients as
where α is adjusted to map the experimental relation between Dt and Dr.
The motion of the passive particles is only governed by Eq. (11) (where we set Fa = 0) for computational efficiency as the rotational degree of freedom of the passive particles does not influence the numerical dynamics in the overdamped regime.
The interaction between particles is implemented with a Lennard-Jones potential given by
where rij = ∥ri − rj∥ is the distance between two particles, ϵLJ the depth of the potential well, and σLJ the width of the potential (distance at which the potential is zero). For passive particles, with purely repulsive interactions, we consider a truncated Lennard-Jones potential where the cut-off is set at rcut = d = 21/6σLJ to remove the attractive part. For active particles, we consider an attractive interaction with a cut-off set at rcut = 5d. The depth of the potential well ϵLJ is obtained from experimental data (Supplementary Fig. 4).
Finally, to describe the impact of the passive particles on the rotational degrees of freedom of the active particles, we introduce the effective torque Ωi on particle i43
where Ω0 sets the strength of the torque, \({\hat{{{{{{{{\bf{v}}}}}}}}}}_{i}={{{{{{{{\bf{v}}}}}}}}}_{i}/\parallel {{{{{{{{\bf{v}}}}}}}}}_{i}\parallel\) and × is the cross product. The negative sign indicates that active particles steer away from the surrounding passive ones; κ = 0.25/d gives the screening number in agreement with the range of experimental values estimated in43. For numerical efficiency, we set a cut-off radius of four particle diameters, where the value of the torque is much lower than the typical thermal noise. The torque used to map the experiments (Ω0 = 72 ± 16 kBT) was computed and confirmed from two different experimental measurements (Figs. 4a,c). In our simulations, the interactions of the active particles with the passive obstacles are therefore dependent on both the potential Vi and the torque Ωi, while the interaction between active particles only depends on Vi as, working at low densities of active particles, they primarily interact when in groups.
Rate equations
The relevant mechanisms for the dynamics are (1) the formation of new groups by combining two free active particles (monomers); (2) the growth of a group by the addition of a monomer; (3) the pairwise merging of groups; and (4) their fragmentation. In the experiments, we define groups as clusters of size larger than two as dimers are unstable in time. Here, for completeness, we consider all cases. We assume that groups only lose one active particle at a time (fragmentation).
We define c1 and ci as the number densities of free active particles (monomers) and groups of size i > 1, respectively. The following rate equations then give the time evolution of c1,
where the first term accounts for the formation of new groups, the second one for the growth of an existing group, the third for fragmentation, and the additional fourth term for the second free active particle released from the fragmentation of groups of size two. If the distance between groups is larger than the persistence length of the free active particles, the main mechanism of mass transport is diffusion and, in the absence of spatial correlations, the rates αmm and αmg should only depend on the size of the active particles and on their effective diffusion coefficients47. For simplicity, we also consider that αmg does not depend on the group size.
Similarly, for groups of size two,
and for groups of size k,
If we now define the number density of groups cg = ∑j>1 cj and the total fragmentation rate f = ∑j>1 fj cj, we obtain,
and,
In the simulation, we observe that the total fragmentation rate is constant for a large range of ρp up to the intermediate values where the largest groups are observed and then drops fast at higher values (Supplementary Fig. 5). Thus, aggregation rather than fragmentation is the leading factor in the non-monotonic dynamics of group formation observed in Fig. 2. If we neglect fragmentation, we obtain Eqs. (1) and (2), respectively.
Data availability
All data supporting the findings of this study are available in the manuscript, the Supplementary Information and in the Source Data file. Source data are provided with this paper.
Code availability
The code that supports the findings of this study is available from the corresponding authors on request.
References
Vicsek, T. & Zafeiris, A. Collective motion. Phys. Rep. 517, 71–140 (2012).
Mukherjee, S. & Bassler, B. L. Bacterial quorum sensing in complex and dynamically changing environments. Nat. Rev. Microbiol. 17, 371–382 (2019).
Czaczkes, T. J., Grüter, C. & Ratnieks, F. L. Trail pheromones: an integrative view of their role in social insect colony organization. Annu. Rev. Entomol. 60, 581–599 (2015).
Moussaid, M., Garnier, S., Theraulaz, G. & Helbing, D. Collective information processing and pattern formation in swarms, flocks, and crowds. Top. Cogn. Sci. 1, 469–497 (2009).
Sieben, A., Schumann, J. & Seyfried, A. Collective phenomena in crowds-where pedestrian dynamics need social psychology. PLoS ONE 12, e0177328 (2017).
Bechinger, C. et al. Active particles in complex and crowded environments. Rev. Mod. Phys. 88, 045006 (2016).
Dorigo, M., Theraulaz, G. & Trianni, V. Reflections on the future of swarm robotics. Sci. Robot. 5, eabe4385 (2020).
Palacci, J., Sacanna, S., Steinberg, A. P., Pine, D. J. & Chaikin, P. M. Living crystals of light-activated colloidal surfers. Science 339, 936–940 (2013).
Lavergne, F. A., Wendehenne, H., Bäuerle, T. & Bechinger, C. Group formation and cohesion of active particles with visual perception-dependent motility. Science 364, 70–74 (2019).
Buttinoni, I. et al. Dynamical clustering and phase separation in suspensions of self-propelled colloidal particles. Phys. Rev. Lett. 110, 238301 (2013).
Cates, M. E. & Tailleur, J. Motility-induced phase separation. Annu. Rev. Condens. Matter Phys. 6, 219–244 (2015).
Ginot, F., Theurkauff, I., Detcheverry, F., Ybert, C. & Cottin-Bizonne, C. Aggregation-fragmentation and individual dynamics of active clusters. Nat. Commun. 9, 696 (2018).
Bricard, A., Caussin, J.-B., Desreumaux, N., Dauchot, O. & Bartolo, D. Emergence of macroscopic directed motion in populations of motile colloids. Nature 503, 95–98 (2013).
Yan, J. et al. Reconfiguring active particles by electrostatic imbalance. Nat. Mater. 15, 1095–1099 (2016).
Pinçe, E. et al. Disorder-mediated crowd control in an active matter system. Nat. Commun. 7, 10907 (2016).
Khadka, U., Holubec, V., Yang, H. & Cichos, F. Active particles bound by information flows. Nat. Commun. 9, 3864 (2018).
Reichhardt, C. & Reichhardt, C. O. Local melting and drag for a particle driven through a colloidal crystal. Phys. Rev. Lett. 92, 108301 (2004).
Kümmel, F., Shabestari, P., Lozano, C., Volpe, G. & Bechinger, C. Formation, compression and surface melting of colloidal clusters by active particles. Soft Matter 11, 6187–6191 (2015).
Van Der Meer, B., Filion, L. & Dijkstra, M. Fabricating large two-dimensional single colloidal crystals by doping with active particles. Soft Matter 12, 3406–3411 (2016).
Omar, A. K., Wu, Y., Wang, Z.-G. & Brady, J. F. Swimming to stability: structural and dynamical control via active doping. ACS Nano 13, 560–572 (2018).
Dietrich, K. et al. Active atoms and interstitials in two-dimensional colloidal crystals. Phys. Rev. Lett. 120, 268004 (2018).
Ramananarivo, S., Ducrot, E. & Palacci, J. Activity-controlled annealing of colloidal monolayers. Nat. Commun. 10, 3380 (2019).
Banerjee, J. P., Mandal, R., Banerjee, D. S., Thutupalli, S. & Rao, M. Unjamming and emergent nonreciprocity in active ploughing through a compressible viscoelastic fluid. Nat. Commun. 13, 4533 (2022).
Madden, I. P., Wang, L., Simmchen, J. & Luijten, E. Hydrodynamically controlled self-organization in mixtures of active and passive colloids. Small 18, 2107023 (2022).
Trivedi, M., Saxena, D., Ng, W. K., Sapienza, R. & Volpe, G. Self-organized lasers from reconfigurable colloidal assemblies. Nat. Phys. 18, 939–944 (2022).
Garnier, S., Gautrais, J. & Theraulaz, G. The biological principles of swarm intelligence. Swarm Intell. 1, 3–31 (2007).
Marsh, L. & Onof, C. Stigmergic epistemology, stigmergic cognition. Cogn. Syst. Res. 9, 136–149 (2008).
Lugano, R., Ramachandran, M. & Dimberg, A. Tumor angiogenesis: causes, consequences, challenges and opportunities. Cell. Mol. Life Sci. 77, 1745–1770 (2020).
Phan, T. V. et al. Bacterial route finding and collective escape in mazes and fractals. Phys. Rev. X 10, 031017 (2020).
Tweedy, L. et al. Seeing around corners: Cells solve mazes and respond at a distance using attractant breakdown. Science 369, eaay9792 (2020).
Reid, C. R., Sumpter, D. J. T. & Beekman, M. Optimisation in a natural system: Argentine ants solve the Towers of Hanoi. J. Exp. Biol. 214, 50–58 (2011).
Murakami, H., Feliciani, C., Nishiyama, Y. & Nishinari, K. Mutual anticipation can contribute to self-organization in human crowds. Sci. Adv. 7, eabe7758 (2021).
Werfel, J., Petersen, K. & Nagpal, R. Designing collective behavior in a termite-inspired robot construction team. Science 343, 754–758 (2014).
Nakayama, B. et al. Tunable pheromone interactions among microswimmers. Proc. Natl. Acad. Sci. USA 120, e2213713120 (2023).
Buttinoni, I., Volpe, G., Kümmel, F., Volpe, G. & Bechinger, C. Active brownian motion tunable by light. J. Phys. Condens. Matter 24, 284129 (2012).
Huang, R. et al. Direct observation of the full transition from ballistic to diffusive brownian motion in a liquid. Nat. Phys. 7, 576–580 (2011).
Pesce, G., Volpe, G., Volpe, G. & Sasso, A. Long-term influence of fluid inertia on the diffusion of a brownian particle. Phys. Rev. E 90, 042309 (2014).
Mognetti, B. M. et al. Living clusters and crystals from low-density suspensions of active colloids. Phys. Rev. Lett. 111, 245702 (2013).
Das, S. et al. Boundaries can steer active janus spheres. Nat. Commun. 6, 8999 (2015).
Simmchen, J. et al. Topographical pathways guide chemical microswimmers. Nat. Commun. 7, 10598 (2016).
Enns, E., Smith, B. & Ehlers, P. Hitting spheres by straight-line motion or brownian motion. J. Appl. Probab. 21, 70–79 (1984).
Gomez-Solano, J. R. et al. Tuning the motility and directionality of self-propelled colloids. Sci. Rep. 7, 14891 (2017).
Liebchen, B. & Löwen, H. Which interactions dominate in active colloids? J. Chem. Phys. 150, 061102 (2019).
Ašperger, S. & Ašperger, S. Chemical Kinetics and Reaction Mechanisms. Chemical Kinetics and Inorganic Reaction Mechanisms. 3-103 (Springer, 2003).
Brambilla, M., Ferrante, E., Birattari, M. & Dorigo, M. Swarm robotics: a review from the swarm engineering perspective. Swarm Intell. 7, 1–41 (2013).
Hamann, H. & Reina, A. Scalability in computing and robotics. IEEE Trans. Comput. 71, 1453–1465 (2021).
Krapivsky, P. L., Redner, S. & Ben-Naim, E. A Kinetic View of Statistical Physics. (Cambridge University Press, 2010).
Araújo, N. A. M. et al. Steering self-organisation through confinement. Soft Matter 19, 1695–1704 (2023).
Crocker, J. C. & Grier, D. G. Methods of digital video microscopy for colloidal studies. J. Colloid Interface Sci. 179, 298–310 (1996).
Leach, J. et al. Comparison of Faxén’s correction for a microsphere translating or rotating near a surface. Phys. Rev. E 79, 026301 (2009).
Plimpton, S. Fast parallel algorithms for short-range Molecular Dynamics. J. Comp. Phys. 117, 1–19 (1995).
Dunweg, B. & Wolfgang, P. Brownian Dynamics without gaussian random numbers. Int. J. Mod. Phys. C 2, 817–827 (1991).
Acknowledgements
We are grateful to Samantha Rueber and Matthew Blunt for initial training on experimental techniques. C.S.D. and N.A.M.A. acknowledge financial support from the Portuguese Foundation for Science and Technology (FCT) under Contracts no. PTDC/FIS-MAC/5689/2020, EXPL/FIS-MAC/0406/2021, CEECIND/00586/2017, UIDB/00618/2020, and UIDP/00618/2020. G.V. (Giovanni) acknowledges funding from the Horizon Europe ERC Consolidator Grant MAPEI (Grant No. 101001267) and the Knut and Alice Wallenberg Foundation (Grant No. 2019.0079). G.V. (Giorgio) acknowledges sponsorship for this work by the US Office of Naval Research Global (Award No. N62909-18-1-2170). N.A.M.A. and G.V. (Giorgio) acknowledge support from the UCL MAPS Faculty Visiting Fellowship programme.
Funding
Open access funding provided by University of Gothenburg.
Author information
Authors and Affiliations
Contributions
Author contributions are defined based on the CRediT (Contributor Roles Taxonomy) and listed alphabetically. Conceptualisation: G.V. (Giovanni), N.A.M.A., G.V. (Giorgio). Data curation: C.S.D., M.T. Formal analysis: C.S.D., M.T., N.A.M.A., G.V. (Giorgio). Funding acquisition: G.V. (Giorgio). Investigation: C.S.D., M.T., N.A.M.A. Methodology: C.S.D., M.T., G.V. (Giovanni), N.A.M.A., G.V. (Giorgio). Project administration: G.V. (Giorgio). Resources: N.A.M.A., G.V. (Giorgio). Software: C.S.D. Supervision: C.S.D., N.A.M.A., G.V. (Giorgio). Validation: C.S.D., M.T., G.V. (Giorgio). Visualisation: C.S.D., M.T., G.V. (Giorgio). Writing—original draft: C.S.D., G.V. (Giovanni), NAMA, GV (Giorgio). Writing—review and editing: C.S.D., M.T., G.V. (Giovanni), NAMA, G.V. (Giorgio).
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks the anonymous reviewers for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Source data
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Dias, C.S., Trivedi, M., Volpe, G. et al. Environmental memory boosts group formation of clueless individuals. Nat Commun 14, 7324 (2023). https://doi.org/10.1038/s41467-023-43099-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-023-43099-0
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
