
Abstract
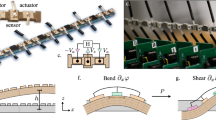
Materials that respond mechanically to external chemical stimuli have applications in biomedical devices, adaptive architectural systems, robotics and energy harvesting1,2,3,4,5. Inspired by biological systems, stimuli-responsive materials have been created that can oscillate2, transport fluid3, provide homeostasis4 and undergo complex changes in shape5. However, the effectiveness of synthetic stimuli-responsive materials in generating work is limited when compared with mechanical actuators6. Here, we show that the mechanical response of Bacillus spores to water gradients exhibits an energy density of more than 10 MJ m−3, which is two orders of magnitude higher than synthetic water-responsive materials7,8. We also identified mutations that can approximately double the energy density of the spores and found that they can self-assemble into dense, submicrometre-thick monolayers on substrates such as silicon microcantilevers and elastomer sheets, creating bio-hybrid hygromorph actuators9,10. To illustrate the potential applications of the spores, we used them to build an energy-harvesting device that can remotely generate electrical power from an evaporating body of water.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 12 print issues and online access
$259.00 per year
only $21.58 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout



Similar content being viewed by others

References
Stuart, M. A. C. et al. Emerging applications of stimuli-responsive polymer materials. Nature Mater. 9, 101–113 (2010).
Yashin, V. V. & Balazs, A. C. Pattern formation and shape changes in self-oscillating polymer gels. Science 314, 798–801 (2006).
Wheeler, T. D. & Stroock, A. D. The transpiration of water at negative pressures in a synthetic tree. Nature 455, 208–212 (2008).
He, X. et al. Synthetic homeostatic materials with chemo-mechano-chemical self-regulation. Nature 487, 214–218 (2012).
Sidorenko, A., Krupenkin, T., Taylor, A., Fratzl, P. & Aizenberg, J. Reversible switching of hydrogel-actuated nanostructures into complex micropatterns. Science 315, 487–490 (2007).
Madden, J. D. W. et al. Artificial muscle technology: physical principles and naval prospects. IEEE J. Ocean. Eng. 29, 706–728 (2004).
Ma, M., Guo, L., Anderson, D. G. & Langer, R. Bio-inspired polymer composite actuator and generator driven by water gradients. Science 339, 186–189 (2013).
Kim, H. & Kwon, S. Water-responsive polymer composites on the move. Science 339, 150–151 (2013).
Reyssat, E. & Mahadevan, L. Hygromorphs: from pine cones to biomimetic bilayers. J. R. Soc. Interface 6, 951–957 (2009).
Reyssat, E. & Mahadevan, L. How wet paper curls. Europhys. Lett. 93, 54001 (2011).
Pickard, W. F. The ascent of sap in plants. Prog. Biophys. Mol. Biol. 37, 181–229 (1981).
Hacke, U. G., Sperry, J. S., Pockman, W. T., Davis, S. D. & McCulloh, K. A. Trends in wood density and structure are linked to prevention of xylem implosion by negative pressure. Oecologia 126, 457–461 (2001).
Dawson, J., Vincent, J. F. V. & Rocca, A. M. How pine cones open. Nature 390, 668 (1997).
Elbaum, R., Zaltzman, L., Burgert, I. & Fratzl, P. The role of wheat awns in the seed dispersal unit. Science 316, 884–886 (2007).
Fratzl, P. & Barth, F. G. Biomaterial systems for mechanosensing and actuation. Nature 462, 442–448 (2009).
Nicholson, W. L., Munakata, N., Horneck, G., Melosh, H. J. & Setlow, P. Resistance of Bacillus endospores to extreme terrestrial and extraterrestrial environments. Microbiol. Mol. Biol. Rev. 64, 548–572 (2000).
Westphal, A. J., Price, P. B., Leighton, T. J. & Wheeler, K. E. Kinetics of size changes of individual Bacillus thuringiensis spores in response to changes in relative humidity. Proc. Natl Acad. Sci. USA 100, 3461–3466 (2003).
Driks, A. The dynamic spore. Proc. Natl Acad. Sci. USA 100, 3007–3009 (2003).
Plomp, M., Leighton, T., Wheeler, K. E. & Malkin, A. J. The high-resolution architecture and structural dynamics of Bacillus spores. Biophys. J. 88, 603–608 (2004).
Sahin, O., Yong, E. H., Driks, A. & Mahadevan, L. Physical basis for the adaptive flexibility of Bacillus spore coats. J. R. Soc. Interface 9, 3156–3160 (2012).
Driks, A., Roels, S., Beall, B., Moran, C. P. J. & Losick, R. Subcellular localization of proteins involved in the assembly of the spore coat of Bacillus subtilis. Genes Dev. 8, 234–244 (1994).
Buehler, M. J. & Yung, Y. C. Deformation and failure of protein materials in physiologically extreme conditions and disease. Nature Mater. 8, 175–188 (2009).
Whaley, S. R., English, D. S., Hu, E. L., Barbara, P. F. & Belcher, A. M. Selection of peptides with semiconductor binding specificity for directed nanocrystal assembly. Nature 405, 665–668 (2000).
Lee, B. Y. et al. Virus-based piezoelectric energy generation. Nature Nanotech. 7, 351–356 (2012).
Driks, A. & Mallozzi, M. in Bacillus anthracis and Anthrax (ed. N. Bergman) 17–38 (Wiley, 2009).
Timoshenko, S. Analysis of bi-metal thermostats. Rev. Sci. Instrum. 11, 233–255 (1925).
Paradiso, J. A. & Starner, T. Energy scavenging for mobile and wireless electronics. IEEE Pervasive Comput. 4, 18–27 (2005).
Wang, Z. L. & Song, J. Piezoelectric nanogenerators based on zinc oxide nanowire arrays. Science 312, 242–246 (2006).
Hong, H. A., Duc, L. H. & Cutting, S. M. The use of bacterial spore formers as probiotics. FEMS Microbiol. Rev. 29, 813–835 (2005).
Sader, J. E., Chon, J. W. & Mulvaney, P. Calibration of rectangular atomic force microscope cantilevers. Rev. Sci. Instrum. 70, 3967 (1999).
Acknowledgements
This work is supported by the US Department of Energy (DOE), Office of Science, Basic Energy Sciences (BES), under award no. DE-SC0007999 (spore energy density measurements), the Rowland Junior Fellows Program (bio-hybrid hygromorph actuators), and the Wyss Institute for Biologically Inspired Engineering (hygrovoltaic generators). The authors thank D. E. Ingber for encouragement and comments on the manuscript, C. P. Stokes for help with the experimental set-up for rapidly switching the humidity levels surrounding the spores, D. Bell for help with electron microscopy and J. M. Sungur for prototype device manufacturing.
Author information
Authors and Affiliations
Contributions
X.C. performed the experiments in Fig. 1 and analysed the data. L.M. contributed to the theory and scaling estimates. A.D. contributed mutant and wild-type spore samples. O.S. conceived and designed the experiments and performed the experiments in Figs 2 and 3. O.S. and L.M. wrote the paper.
Corresponding author
Ethics declarations
Competing interests
A patent application has been filed by Harvard University. US provisional application no. 61/415,902: ‘Bacterial spore based energy system’.
Supplementary information
Supplementary information
Supplementary information (PDF 521 kb)
Rights and permissions
About this article
Cite this article
Chen, X., Mahadevan, L., Driks, A. et al. Bacillus spores as building blocks for stimuli-responsive materials and nanogenerators. Nature Nanotech 9, 137–141 (2014). https://doi.org/10.1038/nnano.2013.290
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/nnano.2013.290
This article is cited by
-
Bioinspired strategies for biomimetic actuators from ultrafast to ultraslow
Nano Research (2024)
-
Natural fiber biocomposites via 4D printing technologies: a review of possibilities for agricultural bio-mulching and related sustainable applications
Progress in Additive Manufacturing (2024)
-
Autonomous self-burying seed carriers for aerial seeding
Nature (2023)
-
Hydration solids
Nature (2023)
-
Engineering living and regenerative fungal–bacterial biocomposite structures
Nature Materials (2022)
