
Abstract
The study of the mechanism of the controlled adhesion of geckos, which is important for the design and fabrication of bio-inspired dry and reversible adhesive surfaces, is widely discussed below the setal level. In this work, the role of the soft lamellar skin in gecko toe adhesion was experimentally revealed. The lamellar skin acting as a soft spring sustains most of the normal deformation during preloading and maintains a wide range of adhesive state rather than a repulsive state. The sequential engagement and peeling off of setal array are responsible for the reliable gecko adhesion and friction control. This soft spring supported pillar structure should be adopted in future bio-inspired adhesives design. A hybrid three-legged spring/setae clamp was developed to transfer a horizontally placed silicon wafer. It indicates the importance of integration and optimization of nanoscale structures as well as the incorporation of their unique, size-dependent properties into functional macroscale devices.
Similar content being viewed by others
Introduction
The exceptional climbing ability of geckos is widely attributed to the hierarchical structure on their toes, with over 10 lamellae on each toe, thousands of setae on each lamellar and hundreds of spatulae on each seta (Fig. 1a)1,2,3,4,5,6,7. During the exploration of the mechanism of geckos' amazing adhesion and friction control during its movement on vertical walls and upside down ceilings, the hierarchical structure has been widely thought to provide a high degree of compliance8 and allows the intimate contact between the spatulae and the surfaces to achieve high adhesion, high friction force3,4,5,6,7,8,9,10 and self-cleaning ability11. Due to the small size of the setae and spatulae, it is natural to think about the structure size effect on the adhesion performance of gecko. As a general phenomenon, Artz et al.5 found that for animals such as flies, spiders and geckos, the dimension of the adhesive terminal setae structures is inversely scaled with their weight and it can be well described by the traditional Johnson, Kendall and Roberts contact model on sphere and flat surface contact12. Theoretical studies also show that the hierarchical structures can increase the effective adhesion energy during detachment from a rough surface by increasing the elastic deformation energy13,14. However, these models cannot explain the easy detachment of gecko toe on substrates due to the simplification of terminal structures of setae as simple spheres or flat ends of cylinders, which is very different from the actual triangular thin spatula pad. The mechanism behind the reversible adhesive properties of geckos was explained by Tian et al.6,15. The group showed that peeling a spatula pad 5 nm to 10 nm thick, ~200 nm wide) at a small angle requires a larger peeling force compared with peeling at a large angle (e.g., perpendicular to a surface). The attachment and detachment processes are both mediated by the rolling actions of the toes (Fig. 1a; A: attachment and D: detachment). During attachment, the setae within the setal array crowd16 to a maximum packing, which results in a low peel angle θ of the spatula pads relative to the surface and leads to high adhesion and friction. By contrast, the rolling motion of the toes during detachment ensures a large θ in order to reduce the peel force for the sequential release of the setae and the lamellar structures. Similar peel angle effect on the peel strength of adhesive tape has been disclosed in 1970s17,18. The effects of modulus and thickness of backing layers of adhesive tapes have also discussed. A lower peel angle, a higher modulus and backing layer thickness can effectively increase the peel force, which could be described in the peel zone model as an increase of effective peel zone length15. While the peel force for adhesive tape strongly depends on the viscoelastic property of the used polymer adhesive, the peel force of gecko spatulae depends on the van der Waals force between spatulae and substrates4,6.

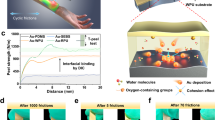
Hierarchical structure of a gecko and its initial contact to a surface: (a) different structural levels of a gecko: animal, feet, toe, lamellae (attachment and detachment) and the setal arrays to the spatulae; (b) sketch of the initial contact of the setal arrays supported on the lamellar skins to a surface.The entire setal arrays cannot come into contact with the surface simultaneously; (c) simplified spring model of the initial contact. The lamellar skin has an initial height hL0 and a spring constant KL, whereas the setal array has an initial height hS0 and an effective spring constant KS.
The geckos' advanced performance in friction and adhesion control endows their excellent climbing abilities and also inspired a new type of dry adhesives19,20,21,22,23,24,25. Understanding the key properties, principles and mechanisms of the gecko adhesive system significantly affected the design of the gecko inspired dry adhesives. Based on the contact of micro-spheres and substrates, one level pillar array surface has been invented with strong adhesion strength in air19 or under water after being coated with a layer of mussel protein20. By mimicking the tilted structure of setae standing on its backing layer, a sliding tilted carbon nanotube array surface could exhibit strong friction force21 and strong anisotropic friction and adhesion property22. With the further study on the hierarchical structure of seta and the principles of splitting up a contact into finer sub-contacts can greatly increases adhesion, hierarchical pillar structures have been fabricated by researchers. Tilted hierarchical pillar structures also showed anisotropic adhesion performance23. However, most of these gecko-inspired synthetic adhesive surfaces with generally limited levels of hierarchy as well as vertical or tilted micro/nanopillars are standing on a continuous backing layer19,20,21,22,23,24 and are different from the real gecko setal arrays supported at the end of the lamellar skin, which may act as a soft spring (Fig. 1a, with a sketch in Fig. 1b). Recently, a so-called combined lamellar and nanofibrillar array exhibits a higher adaptability to a nonplanar surface than that of fibers standing on a single flat backing layer25. But its nanofibers are standing on the whole lamellar layer with no lamellar skin spring at its end. It should also be noted that, recently, by comparing gecko and adhesive tape, a novel gecko-inspired reversible adhesive surface based on inextensible, draping fabrics with no patterned pillars has also been fabricated and shows strong adhesion26. This work is based on the less stretchable fabrics as the backing layer, which may lead to a large peel zone length and could be explained by the peel zone model for adhesive tapes15.
In real gecko spatular nanocontacts with substrates, the small adhesion and friction forces from each spatula are integrated to the seta, then to the lamellar skin and finally to the toe and feet. However, the role of the lamellar skin during the integration of the spatular nanocontacts to the macroscopic toe has been seldom discussed. In this study, the hierarchical structure of the gecko below the toe level is schematically represented as a series of springs (with the lamellar skin spring constant KL and the setal spring constant KS) in the unloaded state (Fig. 1c). The Ks of the simplified setal array is different from those multilevel spring models of setal arrays alone14,27. The use of sliding setal arrays, which are supported by a spring to mimic the setal array that stands on the lamellar skin, shows that the lamellar skin and its properties (i.e., stiffness) significantly contribute to the efficient and controlled attachment and detachment of the arrays to and from the surfaces by providing a wider range of adhesive forces for the toes rather than resulting into a repulsive state. A hybrid, three-legged, clamp-mimicking gecko lamellar structure was developed to achieve the vertical lift, horizontal movement and vertical release of a horizontally placed silicon wafer. The lamellar skin-like soft supporting spring structure should be incorporated into the next generation of gecko-inspired adhesives to provide an easier and more reliable friction and adhesion control.
Results
Sliding test of the soft-spring supported gecko setal array
A series of optical side-view images of a setal array suspended on a relatively weak cantilever (KL = 168 N/m), which mimics the lamellar skin (KL ~ 200 N/m, a cantilever beam, elastic modulus 1 GPa, width 0.33 mm, length 1.2 mm, thickness 0.16 mm), during a typical tribological measurement is shown in Fig. 2a. When applied with a preload of 3 mN, the setal array is sheared at a constant velocity v = 60 μm/s. The normal and friction forces compress the setal array, which results in a lower tilt angle of the setal shafts. In turn, the normal force and friction forces further increase until the crowded state is reached (Fig. 2a, captions vi–vii). Moreover, the tilt angle decreases from an initial preloaded value of 63° to a final value of 18°. The low spring constant of the cantilever (or in the case of a gecko, the lamellae skin) allows for large normal deformation, until the setal array reaches its crowded state for higher adhesion and friction (Fig. 2b). The replotting of the tribological data as a ratio of friction to normal forces28 shows that although the tribological force has not reached its saturation level, the ratio of the two forces has already become saturated.

Sliding setal array at a fixed preload L0: (a) tilt angles of the setal shafts at different sliding distances; (b) typical friction and normal force curves (upper panel) and their ratio (lower panel) versus the sliding time; (c) sketch of the perpendicular deformation at a preload L0 (which corresponds to the height of the supporting spring hLS and the setal array hS) and during sliding.
The absolute height of the supporting spring and the setal array both change by ΔL. The measured normal force through the supporting spring is given by Fn = KL(ΔL − L0).
Therefore, the sliding process can be divided into three distinct regimes. Within the initial regime (I) from i to iv with light blue background, the normal force rapidly (within 2 seconds, which correspond to a shearing distance of about 120 μm) enters the adhesive regime (i.e., positive adhesion force) from the initial repulsive state due to the applied preload upon the onset of sliding, whereas the friction force continues to increase. The spatulae then become active as a result of sliding (i.e., adherent)3 and of the reorganisation of the sliding and peeling direction of the contacted spatulae3,29. Within the second regime (II) between iv and vi with light sienna background, the force ratio of friction to adhesion reflects the microscopic peeling angle according to the theoretical model of spatula peeling6. A force ratio that approaches a constant (~20) corresponds to a nominal peel angle of approximately 3°. With further sliding, the number of contacted spatulae with the same peel angle increases along with the decrease in the tilt angle of the setal shafts, until it finally enters a constant crowded sliding state in the third regime (III) with light olivine background. Regime (II) explains the effects of the natural angles of the setal arrays on the lamellar skin and on the θ, α and γ surfaces (Figs. 1a and 1b), which is really important for the understanding of how geckos control the number and peel angle of nanocontacts of spatulae to obtain the desired adhesion and friction forces.
At stage (III), the setal shaft tilt angle as well as the adhesion and friction forces becomes saturated. Fig. 2c shows a schematic of the system, which highlights the changes in the normal deformations during sliding. The use of a relatively weak cantilever in the test results in a lower measured adhesion force compared with the actual adhesion force generated by the setal arrays. This result is due to the mechanical repulsive force resulted from the normal compression of the setal shafts. After sliding, the actual adhesion force during normal pull-off is significantly larger than that in the sliding, which is important for gecko to obtain a reliable attachment to vertical walls and upside down ceilings. It also means that the sliding process shows a significant importance in efficient and reliable engagement of spatulae to surfaces. A weak spring constant of the lamellar skin allows the gecko setal array to achieve its crowded intimate contact state.
The flexibility of the lamellar skin also provides a wider range of normal displacement of the gecko toes during attachment with an adhesive state. During the movement of gecko on vertical walls or ceilings, it is important to keep an adhesive state of its feet. This flexibility on normal displacement control of gecko toe contributes to the controlled and safe contact of the setal array to a surface for achieving reliable adhesion and friction forces. For a given normal preload displacement L0, a stiff lamellar skin would result in a major deformation at the setal array level (middle panel in Fig. 3a), which may easily generate a repulsive force because of the compression of the crowded setal array. In real situations for the gecko, the lamellar skin has a weak spring constant that leads to an increased deformation of the lamellar skin, which ensures that the gecko feet experience an adhesive force in a wider normal compression displacement range during the attachment of a gecko toe toward a wall. This effect is particularly crucial when geckos climb on walls and walk on ceilings. If the gecko applies a large preload displacement L0 before sliding, which is required to initiate adhesion and friction, the repulsive force generated by the crowded setal array can potentially overcome the adhesion force generated by the remaining adhered toes, thus resulting in a complete loss of adhesion (i.e., the gecko falls off the wall or ceiling). However, in the real case, the weak lamellar skin (i.e., small spring constant KL) provides the gecko with the ability to apply a wider range of normal displacement before experiencing a high repulsive force from the crowded setal array.

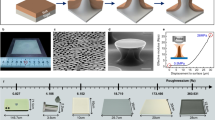
Sliding of a setal array at different preload L0 with different supporting springs of different KL: (a) sketch of the deformation of the supporting spring and the setal array; (b) stable normal force of the setal array at different L0 and KL; and (c) normal force shown in the panel versus the deformation of the setal array.
To verify the spring constant effect on the safe displacement range during the engagement of setal array during attachment, sliding adhesion measurements were performed on the same setal array using three cantilevers with different spring constant KL to mimic the stiffness of lamellar skins. The tested results of normal force Fn versus the applied preload displacement are shown in Fig. 3b. A positive value of Fn (with light blue background) means the normal force experience by the spring is adhesive during the sliding after applying a certain preload, while a negative value (with light olivine background) indicates a repulsive force experienced by the cantilever. In the case of using a cantilever with a spring constant of 879 N/m, the cantilever measured saturated adhesion force during sliding firstly increased as the increase of the preload displacement L0 to the maximum value corresponding to L0 of about 6 μm and finally decreased and switched to a repulsive force when L0 was over 9 μm. Therefore, the safe regime of normal preload displacement for this cantilever is 9 μm. While a cantilever with KL = 196 N/m, the safe regime increases to about 23 μm. As expected, the safe regime (i.e., adhesion regime, the experienced normal force on the spring is adhesive) is larger for a cantilever with a lower KL. The adhesion force is then replotted as a function of the normal deformation of the setal array ΔHseta as shown in Fig. 3c. The ΔHseta curves agree with each other very well and confirm that the measured adhesion force is governed by the deformation of the setal array regardless of the supporting spring stiffness. Similar experimental results show an increase in the adhesion force to a peak value, followed by a decrease30. However, the tests using different spring constants as well as the final crowded repulsive state have not been experimentally reported to date. Moreover, the two-level spring model used in this study is significantly different from the several-level spring models proposed for the description of setal shafts to spatulae in literature14,27. These several-level spring models for hierarchical setal array are simplified as the second level of the spring Ks in this study. The stiffness effect of the hierarchical structures on the effective modulus8 or the effective adhesive energy13 discussed in former researches is the effect of Ks, which is different from KL, representing the stiffness of the lamellar skin supporting the setal array.
Timeline of the mechanism and biomimetic design of a gecko surface and of the developed hybrid clamp
During the last decade, significant progress has been made in developing models and theories of gecko adhesion accompanied with the development of gecko-inspired synthetic adhesives (Fig. 4a). Since the significant progress in the van der Waals interaction mechanism3,4 and split principle5 of gecko adhesion was disclosed, various gecko inspired vertical single level polymer pillars with strong adhesion have been developed8,9,11. Later, models and fabrications of hierarchical structures have been developed to achieve softer stiffness and higher effective adhesion energy of pillar structures14. After a peel model was developed to explain the strong attachment and easy detachment of the gecko spatulae6, more complex anisotropic designs were developed to achieve reversible adhesion24,31,32,33. Recently, a combined lamellar and nanofibrillar array structures were also fabricated25, which fibers stand on the whole lamellar skin and are different from the actual case, wherein the setal array with a backing layer is supported by the lamellar skin spring. To integrate the next generation of gecko-inspired adhesives into dynamic devices such as climbing robots, we propose that a real lamellar-like structure should be used to provide an easy and reliable control of adhesion and friction in various applications. For example, the stiffness of the lamellar-like structure in climbing robots will depend on (i) the compliance of the synthetic adhesive array, (ii) the adhesive and friction strength of the synthetic array and (iii) the normal displacement resolution of the actuators (stiffer spring needs higher control precision in the normal displacement).

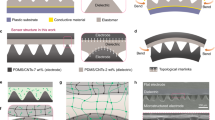
Development of the understanding of gecko adhesion and its biomimetic fabrication: (a) selected main theories and biomimetic designs of the gecko surface; and (b) hybrid three-legged clamp based on a spring/setal array for transferring a silicon wafer.
Inspired by the “V” geometry of gecko foot15 and the function of the lamellar skin as a spring to support and slide the setal array to integrate and control the forces of spatulae, a hybrid three-legged clamp with a setal array supported at the end of a sphere glued on a metal leg spring was developed as shown in Fig. 4b. This clamp is different from the general use of the strong lateral friction force of gecko inspired adhesive surfaces21,25. The detail design and fabrication principles are introduced in the methods section and a diagram is given in the supporting information. By mimicking the sliding action of gecko toes, stretching a thread can bend the leg springs to slide setal arrays in its grip in direction (toward the center of the clamp) to achieve high adhesive force with a silicon wafer and remain the adhesive force to normally lift the wafer. On the contrary, by relaxing the leg springs, the springs move back to slide the setal array in its release direction (away from the center of the clamp) to reverse the adhesive force to a repulsive force to release the silicon wafer. Considering the limit of the normal deformation of the setal arrays, the silicon wafer is placed on a soft cushion, which is the function of lamellar skin and the active compression control of real gecko. The clamp successfully lifted and moved a horizontally placed flat silicon wafer (Fig. 4b). The actions involved (i) moving down for contact, (ii) being gripped in by springs to induce the sliding of the setal array to adhere to the silicon wafer, (iii) moving up vertically to lift the wafer, (iv) moving laterally to transfer the wafer to a new position, (v) and finally relaxing the leg springs to slide against the curvature of the setal array shafts to release the wafer. This clamp shows the utilization of an efficient and controlled adhesion through a soft spring and the setal array. Theoretically, it can also be realized with gecko-inspired surface with anisotropic adhesion and friction behaviours. In industrial applications, there are many kinds of grippers to pick up and release objects, like utilizing magnetic attraction or vacuum suction. Vacuum sucker has been widely used in the integrated circuits industry to move silicon wafers. In the manufacturing condition with vacuum environment requirement, the vacuum sucker can not be used. The gecko setal array or gecko inspired adhesive surface based clamp could be a good candidate. Also, in space applications, gecko setal surface or gecko inspired surface based grippers using van der Waals forces have obvious advantages in environmental adaptability.
Discussion
Although there is plenty of room at the bottom34, macroscopic human activities must be sufficiently integrated from the nanoscale to the macroscale to fully utilise the developments at the bottom. As shown above, as a soft spring, the millimetre-sized lamellar skin is crucial for the gecko to bridge its spatular nanocontacts to promote macroscopic adhesion and friction for climbing walls and ceilings. In the area of nanotechnology, similar integration has been paid more and more attention. For instance, self-organised layered superamolecular films stacked in different arrangement show different macroscopic adhesive properties35. The growth of yarn-spinnable and sheet-drawable carbon nanotube forests on highly flexible stainless steel sheets instead of on silicon wafers makes the fabrication of macroscopic fabrics possible36. Therefore, the integration of nanostructures and their size-dependent unique properties into optimised macroscale functional devices is of great importance.
As a conclusion, the lamellar skin of gecko and its properties (i.e., stiffness) can significantly contribute to the efficient and reliable control of the attachment and detachment of setal arrays during gecko movement. A lamellar skin/spring-like structure should be incorporated into future generations of gecko-inspired adhesives to provide more control on adhesion and stronger adaptability to surfaces. The developed three-legged hybrid clamp that mimics a lamellar skin/setae structure can successfully transfer a horizontally placed silicon wafer. This work emphasises the importance of integrating and optimising the functionalities of nanoscale structures into macroscale functional devices.
Methods
The friction and adhesion test apparatus is home-made (Sketch shown in the supporting information). The normal and lateral motions are driven by stepping motors. Two spring cantilevers are used to measure the friction and adhesion forces, similar to our former test of the friction and adhesion properties of setal array with surface force apparatus30 or our self-developed test apparatus37. Two eddy current sensors are used to detect the deformation of the springs. A glass slide is used to slide against the setal array. Before assembly, the glass plate is sequentially cleaned with acetone, ethanol and deionised water and finally dried with nitrogen. An isolated gecko setal array is acquired by adhering a gecko toe to a clean glass slide and then sliding it quickly, which triggers the release of certain setal array strips. The setal array is cut into regular square sharp pieces under a stereomicroscope using a scalpel and then glued on top of a steel ball (4 mm diameter) using AB glue (DP420 - 3 M production) under a microscope. The array is then aged at room temperature for 3 hours prior to assembly in the test apparatus. Before a typical test, two cameras are set on the top and side of the seta glass to adjust the alignment between the setal array and the glass surface. By mounting the steel ball with the setal arrays on top of different spring cantilevers, the friction and adhesion test can be performed using different spring constants. While the lateral force along the sliding direction is called friction, the initial applied compressive force acted on the spring and the setal array is called the preload. After sliding, the normal force is measured from the deformation of the spring, depending on the direction of the normal force, if the setal array is stretched, the normal force is adhesive force, on the contrary, it is repulsive.
At the end of this study, a hybrid, three-legged clamp is designed and fabricated. To utilize the adhesion force of the setal arrays, the friction force should be compensated with each other, a sliding distance over 480 μm is necessary to engage reliable contacts between the spatulae and the silicon wafer according to the results shown in Fig. 2. The normal deformation of setal array should be less than 40 μm according to Fig. 3. Therefore, during the action of the clamp, the sliding in the grip in and release directions are the key points in clamp design. Finally, the design diagram is decided as shown in the figure in the supporting information and the fabricated clamp is as shown in Fig. 4b. Three springs are uniformly distributed and fixed on a cylinder holder. A steel ball with a diameter of 2 mm is attached to the end of each spring. The three setal arrays with approximately 0.33 × 0.4 mm2 were carefully glued on the top of spheres to keep their top spatulae surfaces remaining in the same plane. Three threads are connected at the midpoint of the spring and go through a central hole in the clamp. These threads can be stretched and relaxed by the motion of a small digital motor simultaneously. To simulate the sliding of the setal arrays on a substrate, the real sliding distance in the design is over 500 μm.
References
Russell, A. P. A contribution to the functional morphology of the foot of the tokay, Gekko gecko (Reptilia, Gekkonidae). J. Zool. Lond. 176, 437–476 (1975).
Ruibal, R. & Ernst, V. The structure of the digital setae of lizards. J. Morphol. 117, 271–294 (1965).
Autumn, K. et al. Adhesive force of a single gecko foot-hair. Nature 405, 681–685 (2000).
Autumn, K. et al. Evidence for van der Waals adhesion in gecko setae. Proc. Natl. Acad. Sci. U. S. A. 99, 12252–12256 (2002).
Arzt, E., Gorb, S. & Spolenak, R. From micro to nano contacts in biological attachment devices. Proc. Natl. Acad. Sci. U. S. A. 100, 10603–10606 (2003).
Tian, Y. et al. Adhesion and friction in gecko toe attachment and detachment. Proc. Natl. Acad. Sci. U. S. A. 103, 19320–19325 (2006).
Thomas, L., Talia, M. Y. & Evan, C. S. Tail-assisted pitch control in lizards, robots and dinosaurs. Nature 481, 181–184 (2012).
Autumn, K., Dittmore, A., Santos, D., Spenko, M. & Cutkosky, M. Effective elastic modulus of isolated gecko setal arrays. J. Exp. Biol. 209, 3558–3568 (2006).
Persson, B. N. J. On the mechanism of adhesion in biological systems. J. Chem. Phys. 118, 7614–621 (2003).
Huber, G., Gorb, S., Hosoda, N., Spolenak, R. & Arzt, E. Influence of surface roughness on gecko adhesion. Acta Biomater. 3, 607–610 (2007).
Hansen, W. R. & Autumn, K. Evidence for self-cleaning in gecko setae. PNAS 102, 385–389 (2005).
Johnson, K. L., Kendall, K. & Roberts, A. D. Surface Energy and Contact of Elastic Solids. Proc. Roy. Soc. London, Ser. A 324, 301–313 (1971).
Jagota, A. & Bennison, S. J. Mechanics of Adhesion through a Fibrillar Microstructure. Integr. Comp. Biol. 42, 1140–1145 (2002).
Gao, H. J., Wang, X. & Yao, H. M. Mechanics of hierarchical adhesion structures of geckos. Mech. Mater. 37, 275–285 (2005).
Pesika, N. S. et al. Peel zone model of tape peeling based on the gecko adhesive system. J. Adhesion 83, 383–401 (2007).
Pesika, N. S. et al. The “Crowding Model” as a tool to understand and fabricate gecko-inspired dry adhesives. J. Adhesion 85, 512–525 (2009).
Kendall, K. Thin-Film Peeling - The Elastic Term. J. Phys. D. Appl. Phys. 8, 1449–1452 (1975).
Gent, A. N. & Hamed, G. R. Peel mechanics of an elastic-plastic adherend. J. Appl. Polym. Sci. 21, 2817–2831 (1977).
Geim, A. K. et al. Microfabricated adhesive mimicking gecko foot-hair. Nature Mater. 2, 461–463 (2003).
Lee, H. S., Lee, B. P. & Messersmith, P. B. A reversible wet/dry adhesive inspired by mussels and geckos. Nature 448, 338–341 (2007).
Qu, L. T., Dai, L. M., Stone, M., Xia, Z. & Wang, Z. L. Carbon nanotube arrays with strong shear bindingon and easy normal lifting-off. Science 322, 238–241 (2008).
Zhou, M. et al. Anisotropic Interfacial Friction of Inclined Multi-Wall Carbon Nanotube Array Surface. Carbon 50, 5372–5379 (2012).
Sitti, M. & Fearing, R. S. Synthetic gecko foot-hair micro/nano-structures as dry adhesives. J. Adhesion Sci. & Tech. 17, 1055–1073 (2003).
Jeong, H. E. et al. A nontransferring dry adhesive with hierarchical polymer nanohairs. PNAS 106, 5639–5644 (2009).
Lee, J. H., Bush, B., Maboudian, R. & Fearing, R. S. Gecko-Inspired Combined Lamellar and Nanofibrillar Array for Adhesion on Nonplanar Surface. Langmuir. 25, 12449–12453 (2009).
Bartlett, M. D. et al. Looking Beyond Fibrillar Features to Scale Gecko-Like Adhesion. Adv. Mater. 24, 1078–1083 (2012).
Kim, T. W. & Bhushan, B. Effect of stiffness of multi-level hierarchical attachment system on adhesion enhancement. Ultramicroscopy 107, 902–912 (2007).
Filippov, A., Popov, V. L. & Gorb, S. N. Shear induced adhesion: Contact mechanics of biological spatula-like attachment devices. Journal of Theoretical Biology 276, 126–131 (2011).
Autumn, K., Dittmore, A. & Santos, D. Frictional adhesion: a new angle on gecko attachment. J. Exp. Bio. 209, 3569–3579 (2006).
Zhao, B. X. et al. Adhesion and Friction Force Coupling of Gecko Setal Arrays: for Structured Adhesive Surfaces. Langmuir 24, 1517–1524 (2008).
Murphy, M. P., Aksak, B. & Sitti, M. Gecko-inspired Directional and Controllable Adhesion. Small 5, 170–175 (2009).
Jin, K. J. et al. The Design and Fabrication of Gecko-inspired Adhesives. Langmuir 28, 5737–5742 (2012).
Ge, L. H., Sethi, S., Ci, L. J., Ajayan, P. M. & Dhinojwala, A. Carbon nanotube-based synthetic gecko tapes. PNAS 104, 10792–10795 (2007).
Feynman, R. There's Plenty of Room at the Bottom. J. Microelectromech. S. 1, 60–66 (1992).
Stupp, S. I. et al. Supramolecular Materials: Self-Organized Nanostructures. Science 276, 384–389 (1997).
Lepró, X., Lima, M. D. & Baughman, R. H. Spinnable carbon nanotube forests grown on thin, flexible metallic substrates. Carbon 48, 3621–3627 (2010).
Wan, J. et al. Experimental research of load effect on the anisotropic friction behaviors of gecko seta array. Acta Physica Sinica 61, 016202 (2012).
Acknowledgements
This work is sponsored by the Natural Science Foundation of China (Grant No. 51175281) and the National Program on Key Basic Research Project (Grant No. 2011CB707603).
Author information
Authors and Affiliations
Contributions
Y.T. conceived the project. J.W., M.Z. and N.P. conducted the experiments. Y. T., J.W. and N.P. analysed the data, interpreted the results and wrote the manuscript. All authors edited the manuscript.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Electronic supplementary material
Supplementary Information
Supporting information
Supplementary Information
Three legged clamp
Rights and permissions
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-nd/3.0/
About this article
Cite this article
Tian, Y., Wan, J., Pesika, N. et al. Bridging nanocontacts to macroscale gecko adhesion by sliding soft lamellar skin supported setal array. Sci Rep 3, 1382 (2013). https://doi.org/10.1038/srep01382
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep01382
This article is cited by
-
Robust scalable reversible strong adhesion by gecko-inspired composite design
Friction (2022)
-
Transient adhesion in a non-fully detached contact
Scientific Reports (2018)
-
Contribution of friction and adhesion to the reliable attachment of a gecko to smooth inclines
Friction (2018)
-
Influence of substrate modulus on gecko adhesion
Scientific Reports (2017)
-
Enhanced Locomotion Efficiency of a Bio-inspired Walking Robot using Contact Surfaces with Frictional Anisotropy
Scientific Reports (2016)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
