
Abstract
Quantum technology based on cold-atom interferometers is showing great promise for fields such as inertial sensing and fundamental physics. However, the finite free-fall time of the atoms limits the precision achievable on Earth, while in space interrogation times of many seconds will lead to unprecedented sensitivity. Here we realize simultaneous 87Rb–39K interferometers capable of operating in the weightless environment produced during parabolic flight. Large vibration levels (10−2 g Hz−1/2), variations in acceleration (0–1.8 g) and rotation rates (5° s−1) onboard the aircraft present significant challenges. We demonstrate the capability of our correlated quantum system by measuring the Eötvös parameter with systematic-limited uncertainties of 1.1 × 10−3 and 3.0 × 10−4 during standard- and microgravity, respectively. This constitutes a fundamental test of the equivalence principle using quantum sensors in a free-falling vehicle. Our results are applicable to inertial navigation, and can be extended to the trajectory of a satellite for future space missions.
Similar content being viewed by others

Introduction
The field of quantum physics and atom optics is promising major leaps forward in technology for many applications, including communication, computation, memory and storage, positioning and guidance, geodesy, and tests of fundamental physics. Among these developments, the coherent manipulation of atoms with light, which exploits the particle–wave duality of matter, has led to the development of matter-wave interferometers exhibiting ground-breaking precision1,2,3,4—particularly for measuring inertial effects such as rotations5,6,7 and accelerations3,4,8,9. However, the exquisite sensitivity of these quantum inertial sensors often limits their applicability to very quiet and well-controlled laboratory settings—despite recent efforts that have led to major technological simplifications and the emergence of portable devices3,10,11. The precision of these instruments becomes particularly relevant when it comes to fundamental tests of general relativity. For instance, the universality of free fall (UFF), a cornerstone of general relativity, which states that a body will undergo an acceleration in a gravitational field that is independent of its internal structure or composition, can be probed at the quantum scale12,13. Tests of the UFF generally involve measuring the relative acceleration between two different test masses in free fall with the same gravitational field, and are characterized by the Eötvös parameter

where a1 and a2 are the gravitational accelerations of the two masses. Presently, the most precise measurement of η using atom interferometry has been carried out with the two isotopes of rubidium at the level of a few 10−8 (ref. 14)—five orders of magnitude less precise than the best tests with classical bodies15,16. This has motivated increasing the sensitivity of matter-wave interferometers (which scales as the square of the free-fall time) by circumventing the limits set by the gravitational free fall on Earth, either by building a large-scale vertical apparatus1,17,18 or by letting the entire set-up fall in an evacuated tower19. This is also one of the main goals for space-borne experiments20,21, where the satellite can be viewed as an ideal ‘Einstein elevator’.
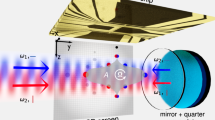
Our experiment, where two matter-wave sensors composed of rubidium-87 and potassium-39 operate simultaneously in the weightless environment produced by parabolic flight (Fig. 1), represents an atom-interferometric test of the UFF in microgravity. We demonstrate measurements of η with precisions of 10−3 during steady flight and a few 10−4 in weightlessness using a new interferometer geometry optimized for microgravity operation. Since the aircraft’s trajectory during parabolic flight closely mimics that of a satellite in an elliptical orbit, but with residual accelerations of ∼1% terrestrial gravity, a precise analysis of its trajectory was necessary to compute the systematic effects on the interferometer phase. This enabled us to quantify the present performance of our atomic sensors onboard the aircraft, and has direct consequences for future implementations of the strap-down inertial navigation algorithm with matter-wave interferometers10,22,23. This analysis has also allowed us to put strict requirements on the satellite trajectory in future space missions that target precisions of δη≃10−15 (refs 20, 21).

(a) Basic trajectory during parabolic flight, which produces 20 s of weightlessness per manoeuvre. The coordinate systems xyz and x′y′z′ correspond to the rotating frame of the vehicle and the frame of the Earth, respectively. (b) The science chamber mounted onboard the aircraft. Samples of 87Rb and 39K are laser-cooled and spatially overlapped in a vapour-loaded magneto-optical trap contained within a titanium vacuum system, which is enclosed by a mu-metal magnetic shield. Raman beams are aligned along the z axis of the aircraft. (c) Schematic of the simultaneous dual-species interferometers. Two Mach–Zehnder-type π/2−π−π/2-pulse sequences are centred about the π-pulse with interrogation times TRb and TK, respectively. These free-fall times are adjusted independently to equilibrate the scale factors of each interferometer.
Results
Operation during steady flight
When the aircraft is in steady flight, each of the matter-wave inertial sensors acts as an atom-based gravimeter3,8,9,24, where counter-propagating light pulses drive Doppler-sensitive single-diffraction Raman transitions between two hyperfine ground states  and
and  , where p is the momentum of the atoms resonant with the Raman transition. This creates a superposition of two internal states separated by the two-photon momentum ħ keff, where ħ is the reduced Planck’s constant and keff≃(4π/λ)
, where p is the momentum of the atoms resonant with the Raman transition. This creates a superposition of two internal states separated by the two-photon momentum ħ keff, where ħ is the reduced Planck’s constant and keff≃(4π/λ) is the effective wavevector of the Raman light (λ=780 nm for rubidium and 767 nm for potassium). Because the Raman beams are retro-reflected, this transfer can occur along either the upward (−keff) or downward (+keff) directions, with an efficiency determined by the vertical velocity v of the atoms. If the velocity is large enough (for example, the Doppler shift keff·v is larger than the spectral width keffσv associated with sample’s velocity spread σv), a specific momentum transfer direction can be selected by an appropriate choice of the Raman laser frequency difference. Changing the sign of the transfer direction allows the rejection of direction-independent systematics by summing two consecutive, alternated measurements13,24. For each transfer direction, the output of the interferometer is given by
is the effective wavevector of the Raman light (λ=780 nm for rubidium and 767 nm for potassium). Because the Raman beams are retro-reflected, this transfer can occur along either the upward (−keff) or downward (+keff) directions, with an efficiency determined by the vertical velocity v of the atoms. If the velocity is large enough (for example, the Doppler shift keff·v is larger than the spectral width keffσv associated with sample’s velocity spread σv), a specific momentum transfer direction can be selected by an appropriate choice of the Raman laser frequency difference. Changing the sign of the transfer direction allows the rejection of direction-independent systematics by summing two consecutive, alternated measurements13,24. For each transfer direction, the output of the interferometer is given by

where P0 is the mean probability of finding the atom in one interferometer output port, C is the fringe contrast and Φ± is the total interferometer phase corresponding to a particular momentum transfer direction (±ħ keff). This phase has contributions from the gravitational acceleration ϕacc=keff·a T2 (where a is the relative acceleration between the reference mirror and the atoms, and T is the free-fall time between light pulses), vibrations of the reference mirror ϕvib, the total laser phase imprinted on the atoms by the Raman beams ϕlas, systematic effects ϕsys and a phase corresponding to a potential violation of the equivalence principle  for either atomic species.
for either atomic species.
Operation during parabolic flight
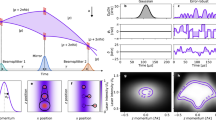
To operate in weightlessness, we introduced a new interferometer geometry consisting of two simultaneous single-diffraction Raman transitions in opposite directions, which we refer to as double single diffraction (DSD). In microgravity, the residual Doppler shift is small and the two opposite Raman transitions are degenerate. Thus, we choose a fixed Raman detuning δ within the spectral width defined by the atomic velocity distribution that simultaneously selects two velocity classes of opposite sign: ±v. This results in two symmetric interferometers of opposite area (Fig. 2), which sum to yield the output signal for a particular internal state

(a) Velocity distribution of the atoms in microgravity. The Raman frequency is tuned near the half-maximum—simultaneously selecting two symmetric velocity classes with opposite signs. (b) DSD interferometer trajectories. Double Raman diffraction43 is avoided by ensuring that the Rabi frequency is much less than the Doppler frequency difference between the two selected velocities. (c) Interference fringes as a function of the vibration phase ϕvib for upward and downward interferometers (P±) and the sum of the two (PDSD). Direction-independent phase shifts like the laser phase ϕlas modulate the contrast but not the phase of the DSD fringes (other phase contributions have been omitted for simplicity).

where 2P0, C≤1/2 since the sample is initially split into two velocity classes by the first π/2-pulse. The DSD interferometer signal given by equation (3) is a product of two cosines—one containing the half-sum ΣΦ= (Φ++Φ−), which exhibits only non-inertial contributions (ϕlas, and direction-independent systematics), and one with the half-difference ΔΦ=
(Φ++Φ−), which exhibits only non-inertial contributions (ϕlas, and direction-independent systematics), and one with the half-difference ΔΦ= (Φ+−Φ−), which contains all inertial contributions (ϕacc, ϕvib and
(Φ+−Φ−), which contains all inertial contributions (ϕacc, ϕvib and  , and direction-dependent systematics). Since non-inertial and inertial contributions are now separated, we fix ϕlas such that the contrast (2C cos(ΣΦ)) is maximized, and the fringes are scanned by the inertially sensitive phase ΔΦ. The DSD interferometer has the advantage of simultaneously rejecting direction-independent systematics during each shot of the experiment, since they affect only the fringe contrast. Hence, the systematic phase shift per shot is greatly reduced compared to the single-diffraction configuration.
, and direction-dependent systematics). Since non-inertial and inertial contributions are now separated, we fix ϕlas such that the contrast (2C cos(ΣΦ)) is maximized, and the fringes are scanned by the inertially sensitive phase ΔΦ. The DSD interferometer has the advantage of simultaneously rejecting direction-independent systematics during each shot of the experiment, since they affect only the fringe contrast. Hence, the systematic phase shift per shot is greatly reduced compared to the single-diffraction configuration.
Correlated atomic sensor measurements
Onboard the aircraft the dominant source of interferometer phase noise is caused by vibrations of the reference mirror, which serves as the inertial phase reference for both 87Rb and 39K sensors. Hence, the atomic signal caused by its motion is indistinguishable from motion of the atoms. To make this distinction, we measured the mirror motion with a mechanical accelerometer from which we compute the vibration-induced phase ϕvib and correlate it with the normalized output population of each species. We refer to this process as the fringe reconstruction by accelerometer correlation (FRAC) method10,24,25. Furthermore, since the two pairs of Raman beams follow the same optical pathway and operate simultaneously, the vibration noise is common mode and can be highly suppressed from the differential phase between interference fringes.
Figure 3 displays interferometer fringes for both 87Rb and 39K, recorded during steady flight (1 g) and in weightlessness (0 g) while undergoing parabolic manoeuvres, for interrogation times T=1 and 2 ms. Owing to the large Doppler shift induced by the gravitational acceleration, fringes recorded in 1 g were obtained with the single-diffraction interferometer along the +keff direction. Matter-wave interference in 0 g was realized using the DSD configuration along both ±keff simultaneously, which requires a Doppler shift close to zero. Least-squares fits to these fringes yield the FRAC phases  , which are related to the gravitational acceleration of each species. From these fits we measure a maximum signal-to-noise ratio of SNR≃8.9, and infer an acceleration sensitivity of (keffT2 SNR)−1≃1.8 × 10−4 g per shot. The best performance onboard the aircraft was achieved with the Rb interferometer at T=5 ms (SNR≃7.6), which yielded 3.4 × 10−5 g per shot—more than 1,600 times below the level of vibration noise during steady flight (∼0.055 g).
, which are related to the gravitational acceleration of each species. From these fits we measure a maximum signal-to-noise ratio of SNR≃8.9, and infer an acceleration sensitivity of (keffT2 SNR)−1≃1.8 × 10−4 g per shot. The best performance onboard the aircraft was achieved with the Rb interferometer at T=5 ms (SNR≃7.6), which yielded 3.4 × 10−5 g per shot—more than 1,600 times below the level of vibration noise during steady flight (∼0.055 g).

The normalized population in the ground-state  for each species is correlated with the vibration-induced phase ϕvib for an interrogation time T≃1 ms (a–c) and T≃2 ms (d–f). Fringes labelled 0g were recorded over three consecutive parabolas for b, and five parabolas for e, consisting of ∼12 points per parabola. Fringes labelled 1g were recorded during periods of steady flight between parabolas, and consist of ∼70 points per manoeuvre. In a,b,d and e, solid lines indicate least-squares fits to sinusoidal functions, which yield a typical SNR of 7 for 87Rb and 5 for 39K data. (c,f) Correlations between population measurements for each interferometer. The solid lines are parametric representations of the corresponding fit functions shown in a,b,d and e. The interferometer scale factor ratio was computed using κ=SK/SRb, where
for each species is correlated with the vibration-induced phase ϕvib for an interrogation time T≃1 ms (a–c) and T≃2 ms (d–f). Fringes labelled 0g were recorded over three consecutive parabolas for b, and five parabolas for e, consisting of ∼12 points per parabola. Fringes labelled 1g were recorded during periods of steady flight between parabolas, and consist of ∼70 points per manoeuvre. In a,b,d and e, solid lines indicate least-squares fits to sinusoidal functions, which yield a typical SNR of 7 for 87Rb and 5 for 39K data. (c,f) Correlations between population measurements for each interferometer. The solid lines are parametric representations of the corresponding fit functions shown in a,b,d and e. The interferometer scale factor ratio was computed using κ=SK/SRb, where  is the exact scale factor for species j (ref. 25). This yielded κ≃0.985 for a–c and κ≃1.001 for d–f. Other parameters: (a–c) TRb=1.01 ms, TK=1 ms; (d–f) TRb=2.01 ms, TK=2 ms; (a–f) π-pulse durations:
is the exact scale factor for species j (ref. 25). This yielded κ≃0.985 for a–c and κ≃1.001 for d–f. Other parameters: (a–c) TRb=1.01 ms, TK=1 ms; (d–f) TRb=2.01 ms, TK=2 ms; (a–f) π-pulse durations:  =17 μs,
=17 μs,  =9 μs.
=9 μs.
Correlation between the potassium and rubidium interferometers is clearly visible when the same data are presented in parametric form (Fig. 3c,f). We obtain general Lissajous figures when the acceleration sensitivity of the two species are not equal25, as shown in Fig. 3c. These shapes collapse into an ellipse (with an ellipticity determined by the differential phase) only when the interferometer scale factor ratio κ≃1 (Fig. 3f). This configuration is advantageous because both interferometers respond identically to low-frequency mirror vibrations (that is, frequencies ≲1/2T), and the Lissajous shape remains fixed regardless of the common-mode phase span. We achieve this condition by ensuring the interrogation times satisfy  .
.
Tests of the UFF
Using the sensitivity to gravitational acceleration along the z axis of the aircraft, we made a direct test of the UFF in both standard gravity and in weightlessness. The relative acceleration between potassium and rubidium atoms is measured by correcting the relative FRAC phase shift for systematic effects (see Methods), and isolating the differential phase due to a possible UFF violation

where  is the ratio of interferometer scale factors when T is much larger than the Raman pulse durations25. The Eötvös parameter was then obtained from
is the ratio of interferometer scale factors when T is much larger than the Raman pulse durations25. The Eötvös parameter was then obtained from  , where aeff is the average projection of the gravitational acceleration vector a along the z axis over the duration of the measurements. This quantity depends strongly on the trajectory of the aircraft. For our experiments, we estimate
, where aeff is the average projection of the gravitational acceleration vector a along the z axis over the duration of the measurements. This quantity depends strongly on the trajectory of the aircraft. For our experiments, we estimate  m s−2 and
m s−2 and  m s−2 during 1 g and 0 g, respectively, where the uncertainty is the 1σ variation of the projection resulting from the aircraft’s orientation. We used the Earth gravitational model EGM2008 to estimate changes in local gravity over the range of latitude, longitude and elevation during the flight and found these effects to be negligible compared with those caused by the variation in the aircraft’s roll and slope angles. The fact that
m s−2 during 1 g and 0 g, respectively, where the uncertainty is the 1σ variation of the projection resulting from the aircraft’s orientation. We used the Earth gravitational model EGM2008 to estimate changes in local gravity over the range of latitude, longitude and elevation during the flight and found these effects to be negligible compared with those caused by the variation in the aircraft’s roll and slope angles. The fact that  is less than g originates from the large variation in the aircraft’s slope angle over a parabola (±45°). From the data shown in Fig. 3d–f, we measure an Eötvös parameter of η1 g=(−0.5±1.1) × 10−3 during steady flight. Here the uncertainty is the combined statistical (
is less than g originates from the large variation in the aircraft’s slope angle over a parabola (±45°). From the data shown in Fig. 3d–f, we measure an Eötvös parameter of η1 g=(−0.5±1.1) × 10−3 during steady flight. Here the uncertainty is the combined statistical ( =4.9 × 10−5) and systematic (
=4.9 × 10−5) and systematic ( =1.1 × 10−3) error—which was limited primarily by direction-independent phase shifts due to the quadratic Zeeman effect. Similarly, in microgravity we measure η0 g=(0.9±3.0) × 10−4, with corresponding statistical (
=1.1 × 10−3) error—which was limited primarily by direction-independent phase shifts due to the quadratic Zeeman effect. Similarly, in microgravity we measure η0 g=(0.9±3.0) × 10−4, with corresponding statistical ( =1.9 × 10−4) and systematic (
=1.9 × 10−4) and systematic ( =2.3 × 10−4) errors. Here the increased statistical error is a result of fewer data available in 0 g. However, the systematic uncertainty improves by a factor of ∼5 compared with measurements in standard gravity. This is a direct result of the reduced sensitivity of the DSD interferometer to direction-independent systematic effects. Both measurements are consistent with η=0.
=2.3 × 10−4) errors. Here the increased statistical error is a result of fewer data available in 0 g. However, the systematic uncertainty improves by a factor of ∼5 compared with measurements in standard gravity. This is a direct result of the reduced sensitivity of the DSD interferometer to direction-independent systematic effects. Both measurements are consistent with η=0.
Discussion
Although the systematic uncertainty was dominated by technical issues related to time-varying magnetic fields, the sensitivity of our measurements was primarily limited by two effects related to the motion of the aircraft—vibrational noise on the retro-reflection mirror and rotations of the interferometer beams. These effects inhibited access to large interrogation times due to a loss of interference contrast, and are particularly important for future satellite missions targeting high sensitivities with free-fall times of many seconds.
In addition to phase noise on the interferometer, large levels of mirror vibrations cause a loss of interference contrast due to a Doppler shift of the two-photon resonance. To avoid significant losses, the Doppler shift must be well bounded by the spectral width of the Raman transition Ωeff during each light pulse. A model of this effect (Supplementary Note 1) confirms that it is most significant when the s.d. of mirror vibrations is  . Figure 4a shows the mean power spectral density of vibrations onboard the aircraft during 1 g and 0 g. We use these data to estimate upper limits on T corresponding to a relative contrast loss of ∼60%. For our experimental parameters, we find Tmax≃20 and 30 ms for 1 g and 0 g, respectively. Conversely, for future space missions planning interrogation times of order T=5 s and Ωeff≃2π × 5 kHz (ref. 20), our model predicts an upper limit on the vibration noise of
. Figure 4a shows the mean power spectral density of vibrations onboard the aircraft during 1 g and 0 g. We use these data to estimate upper limits on T corresponding to a relative contrast loss of ∼60%. For our experimental parameters, we find Tmax≃20 and 30 ms for 1 g and 0 g, respectively. Conversely, for future space missions planning interrogation times of order T=5 s and Ωeff≃2π × 5 kHz (ref. 20), our model predicts an upper limit on the vibration noise of  μg. One strategy to mitigate this effect is to suppress high-frequency vibrations using an active isolation system modified to operate in microgravity26. However, for inertial navigation applications, measuring the vibrations is critical to accurate positioning, thus a hybrid classical-quantum solution may be more viable27. Onboard the aircraft, a combination of these two solutions will give access to free-fall times up to ∼1 s, above which the jerk of the aircraft will be too large to keep the atoms in the interrogation region defined by the Raman beams.
μg. One strategy to mitigate this effect is to suppress high-frequency vibrations using an active isolation system modified to operate in microgravity26. However, for inertial navigation applications, measuring the vibrations is critical to accurate positioning, thus a hybrid classical-quantum solution may be more viable27. Onboard the aircraft, a combination of these two solutions will give access to free-fall times up to ∼1 s, above which the jerk of the aircraft will be too large to keep the atoms in the interrogation region defined by the Raman beams.

(a) The mean power spectral density of vibrations along the z axis of the aircraft during 1g and 0g. At low frequencies (≲2 Hz), the amplitude of vibrations is approximately five orders of magnitude higher than those found in a quiet laboratory setting24. The s.d. of the vibration noise spectrum is  ≃0.055g during 1g and 0.038g during 0g. (b) The rotation rates about the x axis (orange line) and y axis (blue line) of the aircraft during a parabola, where |Ωy|∼5° s−1 during parabolic manoeuvres. (c) Interferometer trajectories in the presence of a constant acceleration az along the z axis and a rotation Ωy about the y axis. Purple lines indicate the time of the Raman pulses. The two circled regions in the xt and zt planes show the separation between the two pathways that lead to a phase shift and a loss of contrast. (d,e) Measured fringe contrast as a function of T for the Rb and K interferometers during both 1g (red points) and 0g (blue points). The error bars indicate the statistical uncertainty from least-squares fits to the corresponding fringes. The solid lines are models for the contrast loss for each species (Supplementary Notes 1 and 2).
≃0.055g during 1g and 0.038g during 0g. (b) The rotation rates about the x axis (orange line) and y axis (blue line) of the aircraft during a parabola, where |Ωy|∼5° s−1 during parabolic manoeuvres. (c) Interferometer trajectories in the presence of a constant acceleration az along the z axis and a rotation Ωy about the y axis. Purple lines indicate the time of the Raman pulses. The two circled regions in the xt and zt planes show the separation between the two pathways that lead to a phase shift and a loss of contrast. (d,e) Measured fringe contrast as a function of T for the Rb and K interferometers during both 1g (red points) and 0g (blue points). The error bars indicate the statistical uncertainty from least-squares fits to the corresponding fringes. The solid lines are models for the contrast loss for each species (Supplementary Notes 1 and 2).
During parabolic manoeuvres, the aircraft’s trajectory is analogous to a Nadir-pointing satellite in an elliptical orbit. The rotation of the experiment during a parabola causes a loss of contrast due to the separation of wave-packet trajectories (Fig. 4c) and the resulting imperfect overlap during the final π/2-pulse1,28,29,30. For a rotation vector ΩT transverse to keff and a velocity spread σv, the wave-packet displacement can be shown to produce a relative contrast loss of  (Supplementary Note 2). Hence, during a parabola where |ΩT|≃5° s−1, the loss of contrast reaches 60% by T=5 ms for our 87Rb sample and by T=2.8 ms for 39K. Figure 4d,e shows the measured contrast loss as a function of T for each species during both steady and parabolic flight. We fit a model to these data, which includes effects due to both vibrations and rotations. Using only a vertical scale factor as a free parameter, we find good agreement with the data. This loss of contrast can be compensated by counter-rotating the retro-reflection mirror during the interferometer sequence1,28. In addition, imaging the atoms on a camera can mitigate this effect, since the rotation-induced spatial fringes in the atomic density profile can be measured directly1,31. Using the model we validated with our experiment, we estimate the rotation limitations of a highly elliptical orbit such as in STE-QUEST20. In the case of a Nadir-pointing satellite with an orbital rotation rate near perigee (700 km) of ∼2.7° s−1, we estimate a 60% loss of contrast by T≃73 ms for the experimental parameters proposed in ref. 20. This justifies the choice of inertial pointing, where the rotation of the satellite counteracts that of the orbit, to reach the target sensitivity of 3 × 10−12 m s−2 per shot at T=5 s. We estimate a loss of <1% at T=5 s can be achieved if the residual rotation rate is <6 × 10−5° s−1.
(Supplementary Note 2). Hence, during a parabola where |ΩT|≃5° s−1, the loss of contrast reaches 60% by T=5 ms for our 87Rb sample and by T=2.8 ms for 39K. Figure 4d,e shows the measured contrast loss as a function of T for each species during both steady and parabolic flight. We fit a model to these data, which includes effects due to both vibrations and rotations. Using only a vertical scale factor as a free parameter, we find good agreement with the data. This loss of contrast can be compensated by counter-rotating the retro-reflection mirror during the interferometer sequence1,28. In addition, imaging the atoms on a camera can mitigate this effect, since the rotation-induced spatial fringes in the atomic density profile can be measured directly1,31. Using the model we validated with our experiment, we estimate the rotation limitations of a highly elliptical orbit such as in STE-QUEST20. In the case of a Nadir-pointing satellite with an orbital rotation rate near perigee (700 km) of ∼2.7° s−1, we estimate a 60% loss of contrast by T≃73 ms for the experimental parameters proposed in ref. 20. This justifies the choice of inertial pointing, where the rotation of the satellite counteracts that of the orbit, to reach the target sensitivity of 3 × 10−12 m s−2 per shot at T=5 s. We estimate a loss of <1% at T=5 s can be achieved if the residual rotation rate is <6 × 10−5° s−1.
We have realized simultaneous dual matter-wave inertial sensors capable of operating onboard a moving vehicle—enabling us to observe correlated quantum interference between two chemical species in a weightless environment, and to demonstrate a UFF test in microgravity at a precision two orders of magnitude below the level of ambient vibration noise. With the upcoming launch of experiments in the International Space Station32,33, and in a sounding rocket34, this work provides another important test bed for future cold-atom experiments in weightlessness. In the Zero-G aircraft, even if the limit set by its motion cannot be overcome, an improvement of more than four orders of magnitude is expected by cooling the samples to ultra-cold temperatures, and actively compensating the vibrations and rotations of the inertial reference mirror. This will approach the desired conditions for next-generation atom interferometry experiments, such as those designed for advanced tests of gravitation35, gradiometry36 or the detection of gravitational waves37.
Methods
Experimental set-up
Experiments were carried out onboard the Novespace A310 Zero-G aircraft, where the interferometers operated during more than 100 parabolic manoeuvres, each consisting of ∼20 s of weightlessness (0 g) and 2–5 min of standard gravity (1 g). Two laser-cooled atomic samples (87Rb at 4 μK, and 39K at 18 μK) were simultaneously interrogated by a π/2−π−π/2 sequence of coherent velocity-sensitive Raman pulses, separated by free-fall times TRb and TK, respectively (Fig. 1a), which set the acceleration response of each interferometer. The laser light used for this manipulation is aligned through the atoms and retro-reflected along the yaw axis (z axis) of the aircraft (Fig. 1b). A detailed description of our experimental apparatus, fibre-based laser system and fluorescence detection scheme can be found in ref. 35. When the aircraft is in steady flight, the Raman beams are vertical—maximizing the sensitivity to gravitational acceleration. Owing to the high vibration levels onboard the aircraft, the interferometer fringes are reconstructed using a correlative method10,24,25 with measurements from a three-axis mechanical accelerometer (Colibrys SF3600) fixed to the rear of the retro-reflecting mirror. These acceleration measurements were also combined with software to discriminate between the 0 g, 1 g and 2 g phases of a parabola (Fig. 1a), and to automatically switch the interferometers between two different operating modes (single diffraction and DSD) during each manoeuvre. A frequency chirp is applied to the Raman frequency during 1 g to cancel the gravity-induced Doppler shift. The chirp is disabled by software during parabolic manoeuvres. Interferometer measurements taken during the 2 g phase were rejected during the data analysis process. Finally, the rotation rates Ωx(t) and Ωy(t) are continuously monitored during the flight using a two-axis fibre-optic gyroscope (KVH DSP-1750). Combined with continuous acceleration measurements, we integrate the equations of motion in the rotating frame to obtain the trajectory of the two atomic clouds with respect to the reference mirror for each shot of the experiment. These trajectories are used to estimate systematic shifts on the measurement of η due to the Coriolis effect and the magnetic gradient.
Evaluation of systematic effects
To evaluate the systematic effects on the measurement of η, we begin by separating the total interferometer phase  (corresponding to atom j and momentum transfer direction
(corresponding to atom j and momentum transfer direction  ) into five contributions
) into five contributions

where  is the phase due to the relative gravitational acceleration a between the reference mirror and the atoms with scale factor
is the phase due to the relative gravitational acceleration a between the reference mirror and the atoms with scale factor  and π-pulse duration
and π-pulse duration  ,
,  is a phase shift from a possible UFF violation,
is a phase shift from a possible UFF violation,  is a random phase caused by mirror vibrations with corresponding time-dependent acceleration avib(t) and interferometer response function fj(t)25,38,
is a random phase caused by mirror vibrations with corresponding time-dependent acceleration avib(t) and interferometer response function fj(t)25,38,  is the contribution from the Raman laser phase ϕj(t) at each interferometer pulse and
is the contribution from the Raman laser phase ϕj(t) at each interferometer pulse and  represents the total systematic phase shift. We express the total systematic phase as the following sum
represents the total systematic phase shift. We express the total systematic phase as the following sum

where i is an index corresponding to a given systematic effect. In general, these phases can depend on both the magnitude and the sign of  . To simplify the analysis, we divide
. To simplify the analysis, we divide  into two separate phases labelled
into two separate phases labelled  for the direction-independent phase shifts and
for the direction-independent phase shifts and  to denote the direction-dependent shifts (that is, those proportional to the sign of
to denote the direction-dependent shifts (that is, those proportional to the sign of  ). We isolate these components by evaluating the sum and the difference between systematics corresponding to each momentum transfer direction
). We isolate these components by evaluating the sum and the difference between systematics corresponding to each momentum transfer direction


For the specific case of the single-diffraction interferometer used in 1 g along + , the systematic phase shift is given by
, the systematic phase shift is given by  . In comparison, for the DSD interferometer, only direction-dependent systematic effects can shift the phase of the fringes measured as a function of
. In comparison, for the DSD interferometer, only direction-dependent systematic effects can shift the phase of the fringes measured as a function of  . In the ideal case, the sum of
. In the ideal case, the sum of  is the sole contribution to the systematic shift of the DSD fringes, since
is the sole contribution to the systematic shift of the DSD fringes, since  is direction-independent and thus contributes only to the fringe contrast (Fig. 2). However, in the more general case, these two phases can indirectly affect the phase of the DSD interferometer when the two pairs of Raman beams do not excite the selected velocity classes
is direction-independent and thus contributes only to the fringe contrast (Fig. 2). However, in the more general case, these two phases can indirectly affect the phase of the DSD interferometer when the two pairs of Raman beams do not excite the selected velocity classes  with the same probability. We denote this contribution
with the same probability. We denote this contribution  , thus the total systematic phase for the interferometers used in 0 g is
, thus the total systematic phase for the interferometers used in 0 g is

Table 1 displays a list of the systematic phase shifts affecting the interferometers operated at T≃2 ms onboard the aircraft (Fig. 3d–f).
Phase corrections and η measurements
The raw interferometer phase for each species is measured directly from fits to the fringes reconstructed using the FRAC method (Fig. 3). We refer to this quantity as the FRAC phase  . For the interferometers used in standard gravity, the measured fringes follow equation (2) with total phase
. For the interferometers used in standard gravity, the measured fringes follow equation (2) with total phase  . Since the vibration phase
. Since the vibration phase  is the quantity used to scan
is the quantity used to scan  , the FRAC phase is related to the sum of all other phase contributions through
, the FRAC phase is related to the sum of all other phase contributions through

where  is an integer representing a certain fringe. Assuming that
is an integer representing a certain fringe. Assuming that  , and provided the total uncertainty from all other phases is much less than π, the UFF phase can be isolated from equation (10) by computing the fringe number from
, and provided the total uncertainty from all other phases is much less than π, the UFF phase can be isolated from equation (10) by computing the fringe number from  , where the square brackets indicate rounding to the nearest integer. A similar procedure can be carried out for the DSD fringes obtained in weightlessness, where the total phase
, where the square brackets indicate rounding to the nearest integer. A similar procedure can be carried out for the DSD fringes obtained in weightlessness, where the total phase  is replaced with the half-difference ΔΦj=
is replaced with the half-difference ΔΦj= (
( −
− ). We point out that the laser phase does not contribute to the DSD interferometer because it is independent of the momentum transfer direction. Furthermore, since we are interested in only the differential UFF phase given by equation (4), the contribution due to the gravitational acceleration cancels
). We point out that the laser phase does not contribute to the DSD interferometer because it is independent of the momentum transfer direction. Furthermore, since we are interested in only the differential UFF phase given by equation (4), the contribution due to the gravitational acceleration cancels  .
.
The Eötvös parameter is obtained from

where aeff is the effective gravitational acceleration to which the atom interferometer is sensitive over the duration of a measurement. To estimate aeff, we first compute the gravitational acceleration along the vertical z′ axis,  , over a two-dimensional grid of latitude (
, over a two-dimensional grid of latitude ( ) and longitude (λ) coordinates at a fixed altitude h using the Earth gravitational model EGM2008 (ref. 39). From these values, we calculate the average projection of the gravitational acceleration vector on the axis of the Raman beams (
) and longitude (λ) coordinates at a fixed altitude h using the Earth gravitational model EGM2008 (ref. 39). From these values, we calculate the average projection of the gravitational acceleration vector on the axis of the Raman beams ( ). In the Earth frame, the interferometer axis is defined as
). In the Earth frame, the interferometer axis is defined as  after rotations about the x′ and y′ axes by roll angle θx and slope angle θy, respectively. It follows that the effective gravitational acceleration is given by
after rotations about the x′ and y′ axes by roll angle θx and slope angle θy, respectively. It follows that the effective gravitational acceleration is given by

where 〈⋯〉 denotes an average. Table 2 contains the list of corrections applied to the raw data to obtain η. We now describe some of the dominant systematic effects that were specific to our experiment onboard the aircraft.
Coriolis phase shift
During steady flight, if the aircraft is tilted by angles θx and θy about the x′ and y′ axes, respectively (Fig. 1a), a component of the gravitational acceleration lies along the axes perpendicular to keff=keff , thus a rotation about these axes will cause a phase shift, ϕΩ, due to the Coriolis effect. To first order in the rotation rate Ω, this shift can be split into two main parts
, thus a rotation about these axes will cause a phase shift, ϕΩ, due to the Coriolis effect. To first order in the rotation rate Ω, this shift can be split into two main parts

where first term is due to an atomic velocity v0 at the start of the interferometer and the second originates from a constant acceleration a0= g +δ a. For small angles θx and θy, it is straightforward to show that
+δ a. For small angles θx and θy, it is straightforward to show that


where δ a is a small shot-to-shot variation due to the motion of the aircraft of order  (Fig. 4a), and the initial velocity is related to δ a via
(Fig. 4a), and the initial velocity is related to δ a via  . Here
. Here  is the selected atomic velocity determined by the frequency difference between Raman beams, and Δt represents the free-fall time between cloud release and the first π/2-pulse (Δt≃3 ms in our case).
is the selected atomic velocity determined by the frequency difference between Raman beams, and Δt represents the free-fall time between cloud release and the first π/2-pulse (Δt≃3 ms in our case).
Table 3 displays the mean value and range of variation of some inertial parameters during each flight configuration. These data imply that the dominant contribution to the Coriolis phase during steady flight is the instability in the roll angle. The corresponding phase shift at T=2 ms is estimated to be  ≃0.1(3) mrad for both 87Rb and 39K. In comparison, during a parabolic trajectory the atoms are in free-fall and the acceleration relative to the mirror is close to zero, hence the Coriolis phase shift is much less sensitive to the orientation of the aircraft relative to g. However, during this phase the aircraft can reach rotation rates of |Ω|>5° s−1 (Fig. 4b), which occurs primarily about the y axis (Fig. 1a). This causes small atomic velocities perpendicular to the direction of keff to produce significant phase shifts. We estimate
≃0.1(3) mrad for both 87Rb and 39K. In comparison, during a parabolic trajectory the atoms are in free-fall and the acceleration relative to the mirror is close to zero, hence the Coriolis phase shift is much less sensitive to the orientation of the aircraft relative to g. However, during this phase the aircraft can reach rotation rates of |Ω|>5° s−1 (Fig. 4b), which occurs primarily about the y axis (Fig. 1a). This causes small atomic velocities perpendicular to the direction of keff to produce significant phase shifts. We estimate  ≃−3.7(3) mrad at T=2 ms for a mean rotation rate of Ωy≃4.1° s−1.
≃−3.7(3) mrad at T=2 ms for a mean rotation rate of Ωy≃4.1° s−1.
These simple estimates, although useful to give an intuitive understanding, do not include effects due to finite Raman pulse lengths  , time-varying rotation rates Ω(t) or time-varying accelerations a(t). Since these effects are significant in our case, it was necessary to develop a new expression to accurately estimate the associated phase shift. The result of these calculations, which were based on the sensitivity function formalism40, is the following expression
, time-varying rotation rates Ω(t) or time-varying accelerations a(t). Since these effects are significant in our case, it was necessary to develop a new expression to accurately estimate the associated phase shift. The result of these calculations, which were based on the sensitivity function formalism40, is the following expression

which describes the Coriolis phase shift due to an atomic trajectory undergoing a time-dependent rotation Ω(t) and acceleration a(t). Here wΩ(t) is a weight function

which contains the interferometer sensitivity function gs(t). In the limit of short pulse lengths, and constant accelerations and rotations, equation (16) reduces to equation (13).
During the flight, we measure the acceleration of the Raman mirror in the rotating frame (Fig. 1) using a three-axis mechanical accelerometer, and the rotation rates Ωx(t) and Ωy(t) are measured using a two-axis fibre-optic gyroscope. The rotation rate about the z axis of the aircraft, Ωz, does not contribute significantly to the Coriolis phase (since it is parallel to keff), hence precise measurements of this quantity using a third gyroscope were not required. We then integrate the equations of motion in the rotating frame to obtain v(t) relative to the Raman mirror, and we use equation (16) to obtain the Coriolis phase shift for each shot of the experiment. The values reported in the third row of Table 1 represent the average of this phase taken over the coarse of all measurements during a given flight configuration. For the DSD interferometer used in 0 g, we computed the Coriolis shift for both upward and downward atomic trajectories and combined the results as in equation (8).
DSD phase shift
The DSD interferometer that we use in microgravity is sensitive to an additional systematic shift that is not present in the single-diffraction interferometer. This phase shift arises from the fact that we cannot distinguish between the atoms that are diffracted upwards and downwards. For instance, if there is an asymmetry in the number of atoms diffracted along these two directions, and the direction-independent phase ΣΦind is non-zero, this will produce two phase-shifted fringe patterns with different contrasts. Since we measure the sum of these two fringe patterns, there is an additional phase shift that depends on the relative contrast ɛ=C−/C+−1 between the ±keff interferometers and ΣΦind as follows

For the T≃2 ms fringes shown in Fig. 3e, we estimate ɛ≃0.05 for both rubidium and potassium interferometers. Hence, using the total direction-independent systematics listed in columns 5 and 7 of Table 1, we obtain DSD phase shifts of  ≃−39(3) mrad and
≃−39(3) mrad and  ≃−29(30) mrad.
≃−29(30) mrad.
Quadratic Zeeman effect and magnetic gradient
The primary source of systematic phase shift in this work originated from a time-varying B-field during the interferometer produced by a large aluminium breadboard near the coils used to produce a magnetic bias field for the interferometers. Owing to the relatively large pulsed fields (∼1.5 G) required to sufficiently split the magnetically sensitive transitions in 39K, Eddy currents produced in the aluminium breadboard during the interferometer significantly shift the resonance frequency of the clock transition  via the quadratic Zeeman effect. We recorded the field just outside the vacuum system with a flux gate magnetometer (Bartington MAG-03MCTPB500) and used these data, in conjunction with spectroscopic calibrations of the field at the location of the atoms, to compute the associated systematic phase shift for each shot of the experiment.
via the quadratic Zeeman effect. We recorded the field just outside the vacuum system with a flux gate magnetometer (Bartington MAG-03MCTPB500) and used these data, in conjunction with spectroscopic calibrations of the field at the location of the atoms, to compute the associated systematic phase shift for each shot of the experiment.
The second-order (quadratic) Zeeman effect shifts the frequency of the clock transition as  , where KRb=575.15 Hz G−2 for 87Rb and KK=8513.75 Hz G−2 for 39K (ref. 41). This effect can shift the phase of the interferometers in three ways: (i) due to a B-field that is non-constant in time
, where KRb=575.15 Hz G−2 for 87Rb and KK=8513.75 Hz G−2 for 39K (ref. 41). This effect can shift the phase of the interferometers in three ways: (i) due to a B-field that is non-constant in time  ; (ii) from a field that is non-constant in space
; (ii) from a field that is non-constant in space  ; or (iii) via the force on the atoms from a spatial magnetic gradient
; or (iii) via the force on the atoms from a spatial magnetic gradient  . The total systematic shift due to magnetic field effects is the sum of these three phases
. The total systematic shift due to magnetic field effects is the sum of these three phases

We model the local magnetic field experienced by the atoms as follows

where β0 is a magnetic bias field, β1=∂B/∂z is a magnetic gradient and ξ(t) is a unitless envelope function that can describe the field turn-on, as well as residual Eddy currents.
The phase shift due to a temporal variation of the B-field  can be computed using40
can be computed using40

where  is the interferometer sensitivity function25,38 and
is the interferometer sensitivity function25,38 and  is the clock shift at the initial position of the atoms. Similarly, the phase
is the clock shift at the initial position of the atoms. Similarly, the phase  due to the clock shift from a spatially non-uniform field can be expressed as
due to the clock shift from a spatially non-uniform field can be expressed as

Here  is the centre-of-mass trajectory of atom j along the interferometer pathways,
is the centre-of-mass trajectory of atom j along the interferometer pathways,  and
and  are the initial atomic position and selected velocity, respectively,
are the initial atomic position and selected velocity, respectively,  is the corresponding recoil velocity and a is a constant acceleration along the direction of z. We have ignored the influence of the magnetic gradient force on the atomic trajectory since it is small compared that of gravity. In equation (22), we have used the difference between the field experienced by a falling atom and that of a stationary atom at z=
is the corresponding recoil velocity and a is a constant acceleration along the direction of z. We have ignored the influence of the magnetic gradient force on the atomic trajectory since it is small compared that of gravity. In equation (22), we have used the difference between the field experienced by a falling atom and that of a stationary atom at z= to separate the spatial effect of the field from the temporal one.
to separate the spatial effect of the field from the temporal one.
To measure |B(z, t)|, we used velocity-insensitive Raman spectroscopy of magnetically sensitive two-photon transitions  and we extracted the resonance frequency as a function of the time in free fall in standard gravity—yielding a map of |B(z, t)|. However, this method cannot distinguish between the temporally and spatially varying components of the field. To isolate the spatial gradient β1, we performed the same spectroscopy experiment with the bias field on continuously to eliminate the turn-on envelope and to minimize Eddy currents. The difference between these measurements yielded the temporally varying component of the field. For typical experimental parameters during the flight (Tj∼2 ms, β0∼1.5 G), we find
and we extracted the resonance frequency as a function of the time in free fall in standard gravity—yielding a map of |B(z, t)|. However, this method cannot distinguish between the temporally and spatially varying components of the field. To isolate the spatial gradient β1, we performed the same spectroscopy experiment with the bias field on continuously to eliminate the turn-on envelope and to minimize Eddy currents. The difference between these measurements yielded the temporally varying component of the field. For typical experimental parameters during the flight (Tj∼2 ms, β0∼1.5 G), we find  ∼2.1 rad and
∼2.1 rad and  ∼30.5 rad, as listed in the first row of Table 1. These relatively large phase shifts are produced by the large bias required to separate the
∼30.5 rad, as listed in the first row of Table 1. These relatively large phase shifts are produced by the large bias required to separate the  states from
states from  , and a significant variation in the envelope during the interferometer (the field changes by ∼0.5 G in 2 ms) produced by the Eddy currents. Similarly, we estimate
, and a significant variation in the envelope during the interferometer (the field changes by ∼0.5 G in 2 ms) produced by the Eddy currents. Similarly, we estimate  ∼0.032 rad and
∼0.032 rad and  ∼0.96 rad during 1 g, which arises from a measured gradient of β1≃13 G m−1, as listed in the second row of Table 1.
∼0.96 rad during 1 g, which arises from a measured gradient of β1≃13 G m−1, as listed in the second row of Table 1.
The phase shift  arising from the force on the atoms due to the magnetic gradient can be computed by evaluating the state-dependent atomic trajectories and following the formalism of ref. 42. Up to order
arising from the force on the atoms due to the magnetic gradient can be computed by evaluating the state-dependent atomic trajectories and following the formalism of ref. 42. Up to order  and
and  =hKj/Mj, this phase can be shown to be
=hKj/Mj, this phase can be shown to be

where the ∓ sign convention corresponds to  . We emphasize that this phase scales (ΛK/ΛRb)2∼33 times more strongly for potassium than rubidium due to its lighter mass and smaller hyperfine splitting
. We emphasize that this phase scales (ΛK/ΛRb)2∼33 times more strongly for potassium than rubidium due to its lighter mass and smaller hyperfine splitting  . However, since the magnetic gradient force is opposite in sign for
. However, since the magnetic gradient force is opposite in sign for  and
and  , and the states are exchanged halfway through the interferometer, this phase shift is generally much smaller than those produced by shifts of the clock transition. For typical experimental parameters during steady flight (Tj≃2 ms,
, and the states are exchanged halfway through the interferometer, this phase shift is generally much smaller than those produced by shifts of the clock transition. For typical experimental parameters during steady flight (Tj≃2 ms,  ≃5 cm s−1, a≃9.8 m s−2 and β1≃13 G m−1), the phase shift is
≃5 cm s−1, a≃9.8 m s−2 and β1≃13 G m−1), the phase shift is  ≃−0.12 mrad for 39K and
≃−0.12 mrad for 39K and  ≃−3.4 μrad for 87Rb. We sum this phase with
≃−3.4 μrad for 87Rb. We sum this phase with  in the second row of Table 1.
in the second row of Table 1.
Data availability
The authors declare that the primary data supporting the findings of this study are available within the article and its Supplementary Information file. Additional data are available from the corresponding author on request.
Additional information
How to cite this article: Barrett, B. et al. Dual matter-wave inertial sensors in weightlessness. Nat. Commun. 7, 13786 doi: 10.1038/ncomms13786 (2016).
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
References
Dickerson, S. M., Hogan, J. M., Sugarbaker, A., Johnson, D. M. S. & Kasevich, M. A. Multiaxis inertial sensing with long-time point source atom interferometry. Phys. Rev. Lett. 111, 083001 (2013).
Rosi, G., Sorrentino, F., Cacciapuoti, L., Prevedelli, M. & Tino, G. M. Precision measurement of the Newtonian gravitational constant using cold atoms. Nature 510, 518–521 (2014).
Gillot, P., Francis, O., Landragin, A., Pereira Dos Santos, F. & Merlet, S. Stability comparison of two absolute gravimeters: optical versus atomic interferometers. Metrologia 51, L15 (2014).
Hardman, K. S. et al. Simultaneous precision gravimetry and magnetic gradiometry with a Bose-Einstein condensate: a high precision, quantum sensor. Phys. Rev. Lett. 117, 138501 (2016).
Gustavson, T. L., Bouyer, P. & Kasevich, M. A. Precision rotation measurements with an atom interferometer gyroscope. Phys. Rev. Lett. 78, 2046–2049 (1997).
Barrett, B. et al. The Sagnac effect: 20 years of development in matter-wave interferometry. C. R. Physique 15, 875–883 (2014).
Dutta, I. et al. Continuous cold-atom inertial sensor with 1 nrad/s rotation stability. Phys. Rev. Lett. 116, 183003 (2016).
Peters, A., Chung, K. Y. & Chu, S. Measurement of gravitational acceleration by dropping atoms. Nature 400, 849–852 (1999).
Hu, Z.-K. et al. Demonstration of an ultrahigh-sensitivity atom-interferometry absolute gravimeter. Phys. Rev. A 88, 043610 (2013).
Geiger, R. et al. Detecting inertial effects with airborne matter-wave interferometry. Nat. Commun. 2, 474 (2011).
Freier, C. et al. Mobile quantum gravity sensor with unprecedented stability. J Phys.: Conf. Ser. 723, 012050 (2016).
Hohensee, M. A., Müller, H. & Wiringa, R. B. Equivalence principle and bound kinetic energy. Phys. Rev. Lett. 111, 151102 (2013).
Schlippert, D. et al. Quantum test of the universality of free fall. Phys. Rev. Lett. 112, 203002 (2014).
Zhou, L. et al. Test of equivalence principle at 10−8 level by a dual-species double-diffraction Raman atom interferometer. Phys. Rev. Lett. 115, 013004 (2015).
Williams, J. G., Turyshev, S. G. & Boggs, D. H. Progress in lunar laser ranging tests of relativistic gravity. Phys. Rev. Lett. 93, 261101 (2004).
Schlamminger, S., Choi, K.-Y., Wagner, T. A., Gundlach, J. H. & Adelberger, E. G. Test of the equivalence principle using a rotating torsion balance. Phys. Rev. Lett. 100, 041101 (2008).
Kovachy, T. et al. Quantum superposition at the half-metre scale. Nature 528, 530–533 (2015).
Hartwig, J. et al. Testing the universality of free fall with rubidium and ytterbium in a very large baseline atom interferometer. New J. Phys. 17, 035011 (2015).
Müntinga, H. et al. Interferometry with Bose-Einstein condensates in microgravity. Phys. Rev. Lett. 110, 093602 (2013).
Aguilera, D. et al. STE-QUEST-test of the universality of free fall using cold atom interferometry. Class. Quantum Grav. 31, 115010 (2014).
Williams, J., Chiow, S.-W., Yu, N. & Müller, H. Quantum test of the equivalence principle and space-time aboard the international space station. New J. Phys. 18, 025018 (2016).
Jekeli, C. Navigation error analysis of atom interferometer inertial sensor. J. Inst. Navig. 52, 1–14 (2005).
Groves, P. D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems 2nd edn Artech House (2013).
Le Gouët, J. et al. Limits to the sensitivity of a low noise compact atomic gravimeter. Appl. Phys. B 92, 133 (2008).
Barrett, B. et al. Correlative methods for dual-species quantum tests of the weak equivalence principle. New. J. Phys. 17, 085010 (2015).
Preumont, A. et al. A six-axis single-stage active vibration isolator based on Stewart platform. J. Sound Vib. 300, 644 (2007).
Lautier, J. et al. Hybridizing matter-wave and classical accelerometers. Appl. Phys. Lett. 105, 144102 (2014).
Lan, S.-Y., Kuan, P.-C., Estey, B., Haslinger, P. & Müller, H. Influence of the coriolis force in atom interferometry. Phys. Rev. Lett. 108, 090402 (2012).
Roura, A., Zeller, W. & Schleich, W. P. Overcoming loss of contrast in atom interferometry due to gravity gradients. New J. Phys. 16, 123012 (2014).
Rakholia, A. V., McGuinness, H. J. & Biedermann, G. W. Dual-axis, high data-rate atom interferometer via cold ensemble exchange. Phys. Rev. Appl. 2, 8 (2014).
Hoth, G. W., Pelle, B., Riedl, S., Kitching, J. & Donley, E. A. Point source atom interferometry with a cloud of finite size. Appl. Phys. Lett. 109, 071113 (2016).
Soriano, M. et al. in Aerospace Conference 2014 IEEE1–11 (2014).
Lévèque, T. et al. PHARAO laser source flight model: design and performances. Rev. Sci. Instrum. 86, 033104 (2015).
Seidel, S. T., Gaaloul, N. & Rasel, E. M. in Proceedings of 63rd International Astronautical Congress 3, 801 (2012).
Hamilton, P. et al. Atom-interferometry constraints on dark energy. Science 349, 849–851 (2015).
Carraz, O., Siemes, C., Massotti, L., Haagmans, R. & Silvestrin, P. A Space-borne gravity gradiometer concept based on cold atom interferometers for measuring Earth’s gravity field. Microgravity Sci. Technol. 26, 139 (2014).
Hogan, J. M. et al. An atomic gravitational wave interferometric sensor in low earth orbit (AGIS-LEO). Gen. Relativ. Gravitation 43, 1953 (2011).
Cheinet, P. et al. Measurement of the sensitivity function in a time-domain atomic interferometer. IEEE Trans. Instrum. Meas. 57, 1141–1148 (2008).
Pavlis, N. K., Holmes, S. A., Kenyon, S. C. & Factor, J. K. Development and evaluation of the earth gravitational model 2008 (EGM2008). J. Geophys. Res. Solid Earth 118, 2633 (2013).
Canuel, B. Étude d’un gyromètre à atomes froids, PhD thesis, Univ. Paris XI https://tel.archives-ouvertes.fr/tel-00193288/document (2007).
Steck, D. A. Rubidium 87 D Line Data. Available at http://steck.us/alkalidata revision 2.1.5 (Accessed on May 2016, 2015).
Bongs, K., Launay, R. & Kasevich, M. A. High-order inertial phase shifts for time-domain atom interferometers. Appl. Phys. B 84, 599–602 (2006).
Lévèque, T., Gauguet, A., Michaud, F., Pereira Dos Santos, F. & Landragin, A. Enhancing the area of a Raman atom interferometer using a versatile double-diffraction technique. Phys. Rev. Lett. 103, 080405 (2009).
Acknowledgements
This work is supported by the French national agencies CNES, ANR, DGA, IFRAF, action spécifique GRAM, RTRA ‘Triangle de la Physique’ and the European Space Agency. B. Barrett and L. Antoni-Micollier thank CNES and IOGS for financial support. P. Bouyer thanks Conseil Régional d’Aquitaine for the Excellence Chair. Finally, the ICE team thank A. Bertoldi of IOGS for his assistance during the Zero-G flight campaign in May 2015; V. Ménoret of MuQuans for helpful discussions; D. Holleville, B. Venon, F. Cornu of SYRTE and J.-P. Aoustin of the laboratory GEPI for their technical assistance building vacuum and optical components; and the staff of Novespace.
Author information
Authors and Affiliations
Contributions
P.B. and A.L. conceived the experiment and directed research progress; B. Battelier contributed to construction of the first-generation apparatus, helped to direct research progress and provided technical support; B. Barrett led upgrades to the second generation apparatus, performed experiments, carried out the data analysis and wrote the article; L.A.-M. and L.C. helped upgrade the potassium interferometer and carried out experiments; T.L. provided technical support during flight campaigns. All authors provided comments and feedback during the writing of this manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Supplementary Information
Supplementary Figures 1-2, Supplementary Notes 1-2 and Supplementary References. (PDF 374 kb)
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Barrett, B., Antoni-Micollier, L., Chichet, L. et al. Dual matter-wave inertial sensors in weightlessness. Nat Commun 7, 13786 (2016). https://doi.org/10.1038/ncomms13786
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/ncomms13786
This article is cited by
-
Enhancing the sensitivity of atom-interferometric inertial sensors using robust control
Nature Communications (2023)
-
The space cold atom interferometer for testing the equivalence principle in the China Space Station
npj Microgravity (2023)
-
Quantum gas mixtures and dual-species atom interferometry in space
Nature (2023)
-
All-optical matter-wave lens using time-averaged potentials
Communications Physics (2022)
-
A compact cold-atom interferometer with a high data-rate grating magneto-optical trap and a photonic-integrated-circuit-compatible laser system
Nature Communications (2022)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
