
Abstract
Chimera states in the systems of coupled identical oscillators are spatiotemporal patterns in which different groups of oscillators can exhibit coexisting synchronous and incoherent behaviors despite homogeneous coupling. Although these states are typically observed in large ensembles of oscillators, recently it has been suggested that chimera states may occur in the systems with small numbers of oscillators. Here, considering three coupled pendula showing chaotic behavior, we find the pattern of the smallest chimera state, which is characterized by the coexistence of two synchronized and one incoherent oscillator. We show that this chimera state can be observed in simple experiments with mechanical oscillators, which are controlled by elementary dynamical equations derived from Newton’s laws. Our finding suggests that chimera states are observable in small networks relevant to various real-world systems.
Similar content being viewed by others

Introduction
The coexistence of the phase locked oscillators with desynchronized and incoherent oscillators in the network of identical oscillators creates the spatiotemporal patterns known as chimera states1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23. These patterns are typical for the large networks of different topologies and have been reported both in simulations1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16 and experiments17,18,19,20,21,22,23. Recently it has been suggested that chimera states can also be observed in small networks24,25,26. Ashwin & Burylko24 have defined a weak chimera state as one referring to a trajectory in which two or more oscillators are frequency synchronized and one or more oscillators drift in phase and frequency with respect to the synchronized group. First, it has been found out that these states can be observed in small networks of as few as 4 phase oscillators24,25,26.
Here, we show that the pattern of the smallest chimera state, which is characterized by two synchronized oscillators and one incoherent oscillator can be observed in the networks of 3 identical nodes. As the proof of the concept we use the network of coupled Huygens clocks27, i.e., the system of coupled pendula which are excited by the escapement clock’s mechanism28,29,30.
We consider the system of 3 coupled pendula shown in Fig. 1(a). which is shown in Fig. 1(a). Pendula of length l, mass m and moment of inertia B which hung from the unmovable disc are coupled to the nearest neighbor through the linear spring with stiffness coefficient kx and linear dampers with damping coefficient cx (shown in red). Pendula’s displacements are given by angles ϕi. The springs and the dampers are connected to each pendulum at distance ls from the pivot. Additionally, the motion of each pendulum is damped by the linear damper characterized by damping coefficient cφ. The energy is transmitted to each pendulum by the escapement mechanism which generate excitation torque MD (in the first stage when 0 < ϕi < γN then MD = MN and when ϕi < 0 then MD = 0 and for the second stage for −γN < ϕi < 0 MD = −MN and for ϕi > 0 MD = 0)28,29. The described system can be experimentally implemented using three metronomes whose pendula are connected by the spring elements as shown in Fig. 1(b). The metronomes’ parameters, details about coupling and measurement techniques are given in the Methods. Each uncoupled pendulum is multistable and has three attractors: fixed points A1+, A1−  and limit cycle A2 shown in Fig. 1(c). The boundaries between the basins of attraction of A1+ and A1− attractors and A2 attractor are given by the ellipsoid
and limit cycle A2 shown in Fig. 1(c). The boundaries between the basins of attraction of A1+ and A1− attractors and A2 attractor are given by the ellipsoid  , where ω is frequency of oscillations and γN is constant given by the design of the escapement mechanism. The basins of attraction of A1+, A1− and A2 are shown respectively in yellow and green colors. The boundaries between basins of A1+ and A1− attractors have not been determined as they play no role in the explanation of the observed behavior.
, where ω is frequency of oscillations and γN is constant given by the design of the escapement mechanism. The basins of attraction of A1+, A1− and A2 are shown respectively in yellow and green colors. The boundaries between basins of A1+ and A1− attractors have not been determined as they play no role in the explanation of the observed behavior.

(a) 3 pendula coupled on the ring through springs and dampers, (b) experimental implementation of the system of Fig. 1(a) with 3 metronomes which pendula are coupled by spring elements, (c) coexisting attractors of each uncoupled pendulum (metronome).
The dynamics of the system in Fig. 1(a) can be analyzed using the equations of motion which are derived from the principles of classical mechanics (see the Methods). Due to the model of the escapement mechanism these equations are not differentiable so is the limit cycle A2 (discontinuity is shown in the inlet of Fig. 1(c)).
Results
For nonzero coupling stiffness kx > 0 we observe broad range of parameters and initial conditions (whole basin of A2 attractor, i.e., green region in Fig. 1(c)) in which the synchronization of all metronomes emerges. We have assumed that all metronomes are synchronized when the phase differences between metronomes’ pendula are zero (in numerical simulations) or close to zero (in experiments), i.e., ϕi(t) − ϕj(t) = 0 (in numerical simulations) and ϕi(t) − ϕj(t) ≈ 0 (in experiments), i, j = 1, 2, 3, i ≠ j. For sufficiently small coupling stiffness kx (smaller than the threshold value kth) chimera states can be generated by the perturbation of the state of complete synchronization (one pendulum is stopped for a moment, i.e., when ϕi = 0,  is set to 0) as can be seen in Fig. 2(a–d). Figure 2(a) presents time series of the displacement of all metronomes’ pendula ϕ1−3(t). The perturbation has been introduced to metronome 1 at the time indicated by the arrow. One can observe that pendula 2 and 3 are synchronized, the phase difference between them is equal to zero (ϕ2(t) − ϕ3(t) = 0) and pendulum 1 performs uncorrelated oscillations (ϕ1(t) − ϕ2,3(t) ≠ constant). Notice that the amplitudes of the oscillations are not equal and all pendula exhibit chaotic oscillations as can be seen in the enlargement shown in Fig. 2(b). The uncorrelated behavior of metronome 1 is confirmed in Poincare maps shown in Fig. 2(c,d). The points for the maps have been taken in the time moments when ϕ2(t) and ϕ3(t) reach maximum (
is set to 0) as can be seen in Fig. 2(a–d). Figure 2(a) presents time series of the displacement of all metronomes’ pendula ϕ1−3(t). The perturbation has been introduced to metronome 1 at the time indicated by the arrow. One can observe that pendula 2 and 3 are synchronized, the phase difference between them is equal to zero (ϕ2(t) − ϕ3(t) = 0) and pendulum 1 performs uncorrelated oscillations (ϕ1(t) − ϕ2,3(t) ≠ constant). Notice that the amplitudes of the oscillations are not equal and all pendula exhibit chaotic oscillations as can be seen in the enlargement shown in Fig. 2(b). The uncorrelated behavior of metronome 1 is confirmed in Poincare maps shown in Fig. 2(c,d). The points for the maps have been taken in the time moments when ϕ2(t) and ϕ3(t) reach maximum ( ). The numerical (Fig. 2(c)) and experimental (Fig. 2(d)) maps show that the behavior of synchronized metronomes 2 and 3 is restricted to the short interval on the line (
). The numerical (Fig. 2(c)) and experimental (Fig. 2(d)) maps show that the behavior of synchronized metronomes 2 and 3 is restricted to the short interval on the line ( ) while
) while  points of metronome 1 are distributed in the set bounded by white squares in the center of Fig. 2(d,c). To show that the observed behavior is a chimera state we calculated phases of each metronome θ1−3(t), (using the Fourier transformation - see Methods). Figure 2(e,f) shows that the phases of two metronomes (2 and 3) are approximately equal and different from the phase of metronome 1, i.e., θ2 ≈ θ3 ≠ θ1 (red dots and blue triangles indicate respectively numerical and experimental results). The mean frequencies of each metronome
points of metronome 1 are distributed in the set bounded by white squares in the center of Fig. 2(d,c). To show that the observed behavior is a chimera state we calculated phases of each metronome θ1−3(t), (using the Fourier transformation - see Methods). Figure 2(e,f) shows that the phases of two metronomes (2 and 3) are approximately equal and different from the phase of metronome 1, i.e., θ2 ≈ θ3 ≠ θ1 (red dots and blue triangles indicate respectively numerical and experimental results). The mean frequencies of each metronome  normalized by the frequency of uncoupled metronome ω are shown in Fig. 2(g). It is clearly visible that the drifting pendulum 1 is not frequency synchronized to the others. For the coupling stiffness kx > kth after the transient the perturbed metronome synchronizes with other two metronomes so the complete synchronization is restored (there are no phase differences between metronomes’ pendula).
normalized by the frequency of uncoupled metronome ω are shown in Fig. 2(g). It is clearly visible that the drifting pendulum 1 is not frequency synchronized to the others. For the coupling stiffness kx > kth after the transient the perturbed metronome synchronizes with other two metronomes so the complete synchronization is restored (there are no phase differences between metronomes’ pendula).

(a) Time series of displacement of all metronomes’ pendula ϕ1−3(t), originally all pendula have been synchronized, at the time indicated by arrow pendulum 1 has been stopped for a moment, (b) enlargement of the part of (a), (c,d) Poincare maps of pendula 1–3, (c) numerical results, (d) experimental results (e,f) snapshots of the phases of each metronomes θ1−3(t), (e) initial phases , (f) final phases θ1−3(T), T = 1500[s], (g) mean frequencies of metronones
, (f) final phases θ1−3(T), T = 1500[s], (g) mean frequencies of metronones  normalized by the frequency of uncoupled metronome ω (red dots and blue triangles indicate respectively numerical and experimental results).
normalized by the frequency of uncoupled metronome ω (red dots and blue triangles indicate respectively numerical and experimental results).
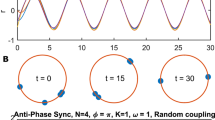
Generally, in the described system the state of complete synchronization of all pendula (see Movie M1) co-exists with the state of partial phase synchronization in which two pendula oscillate in antiphase and the third one is at rest (see Movie M2) and the smallest chimera state (see Movie M3). Chimera state can be obtained also from random initial conditions when initial conditions of two metronomes belong to the basin of attractor A2 and initial conditions of the third one to the basins of attractors A1+ and A1−.
In the considered system of coupled metronomes chimera states can be observed due to: (i) the self-exited nature of its oscillations (ii) the multistability (co-existence of A1+, A1− and A2 attractors) of each metronome and (iii) sufficiently small (too small to forced synchronization via the energy transfers between metronomes28,29,30). These conditions can be generalized for the networks of coupled mechanical oscillators.
In summary, we have constructed the simple experimental setup to show the existence of the smallest chimera state in the network of three coupled pendula. The nodes in the network are locally coupled pendula (Huygens’ clocks realized by metronomes). We observe the formation of coexisting coherent (two synchronized pendula) and incoherent (the third pendulum) groups. This behavior is observed experimentally and confirmed in numerical simulations. It seems that such chimera states are common in the small networks of coupled multistable systems.
Methods
The dynamics of the system of coupled pendula shown in Fig. 1(a) is given by:

where i = 1, 2, 3, φ0 = φn, φn+1 = φ1. System (1) is symmetrical on the ring, i.e., pendulum i is coupled with pendula i + 1 and i − 1 (local coupling).
Numerical simulations
The following parameter values have been used: m = 0.044 [kg], l = 0.011[m], ls = 0.005[m], B = 0.0000974 [kgm2], cφ = 0.00000107 [Nms], MD = 0.00022 [Nm], γN = 17°, cx = 0.035 [Ns/m], kx = 0.444 [N/m]. The frequency of uncoupled metronome’s pendulum is equal to ω = 6.97[s−1]. With these parameters values the escapement mechanism generates oscillations of the uncoupled pendulum with amplitude A ≈ 0.75 [rad] ≈ 43°. The 4th order Runge-Kutta method has been used for integration of eq. (1). The phases θ1−3(t) of the metronomes are obtained from numerical and experimental time series ϕ1−3(t) using Hilbert transformation:  . Further, the phases are used to obtain the averaged frequencies over time T:
. Further, the phases are used to obtain the averaged frequencies over time T:  . The averaging has been performed over the time interval T = 1500 [s].
. The averaging has been performed over the time interval T = 1500 [s].
Experimental visualization
The set of 3 coupled metronomes shown in Fig. 1(b) has been used to confirm experimentally the existence of chimera states in the small network. Wittner Maelzel metronomes (Model No. 802K) covering frequency range of 40 (largo) to 208 (prestissimo) tics per minute, with a standard deviation of relative frequencies of ~1% have been used. Depending on the adjusted frequency each metronome ticks for a duration of approximately 25 min (when fully wound up). We have measured the angular displacements of metronomes’ pendula φi to quantitatively analyze the behavior of the coupled metronomes
The metronomes have been placed on the equilateral triangle as shown in Fig. 1(b). The triangle’s side has the length of 0.43 [m]. We have used the rubber bands (with the cross section radius 0.0001 [m]) of the length 0.43 [m] connecting the nearest neighbors as the spring elements. The estimated stiffness coefficient kx is equal to 0.444 [N/m]. The threshold value on coupling stiffness is equal to kth = 1.51[N/m]. The motion of the set of coupled metronomes has been recorded in two ways: (i) with a single Phantom v711 camera capable of high speed image acquisition, one at the time of a record (to obtain data shown in Fig. 2(c) and (ii) with the set of 4 general purpose devices: 3 Canon 5D facing directly each metronome’s pendulum respectively plus Sony HDR-MV1 observing the overall behavior from the top of the rig (Figs 1(b) and 2(d) and Movie W1). High speed camera Phantom v711 camera has been set to the speed of 100 or 150 fps recording in order to cover long time of the oscillator’s work, more than 1500 periods. The markers have been applied at the arms of the metronomes for further investigation with motion analysis program. TEMA software by Image Systems has been applied to consecutive movies (image sequences) which delivered digital values of angle, velocity and acceleration data obtained from tracing the markers on the arm of each metronome. Such time series allowed for the construction of the map presented in Fig. 2(c,d). As the method of observation, 4 recordings from 4 general purpose cameras have been gathered as the combination of views of behavior of the investigated oscillators in chosen examples. The final, rendered view from them has been synchronized within single frame accuracy.
Additional Information
How to cite this article: Wojewoda, J. et al. The smallest chimera state for coupled pendula. Sci. Rep. 6, 34329; doi: 10.1038/srep34329 (2016).
References
Panaggio, M. & Abrams, D. 2015 Chimera states: coexistence of coherence and incoherence in networks of coupled oscillators. Nonlinerity. 28, 67–87 (2015).
Kuramoto, Y. & Battogtokh, D. Coexistence of coherence and incoherence in nonlocally coupled phase oscillators. Nonlinear Phen. Complex Syst. 5, 380–385 (2002).
Abrams, D. M. & Strogatz, S. H. Chimera states for coupled oscillators. Phys. Rev. Lett. 93, 174102 (2004).
Abrams, D. M., Mirollo, R., Strogatz, S. H. & Wiley, D. A. Solvable model for chimera states of coupled oscillators. Phys. Rev. Lett. 101, 084103 (2008).
Motter, A. E. Nonlinear dynamics: Spontaneous synchrony breaking. Nat. Phys. 6, 164–165 (2010).
Omelchenko, I., Maistrenko, Y. L., Hövel, P. & Schöll, E. Loss of coherence in dynamical networks: Spatial chaos and chimera states, Phys. Rev. Lett. 106, 234102 (2011).
Omelchenko, I., Riemenschneider, B., Hövel, P., Maistrenko, Y. L. & Schöll, E. Transition from spatial coherence to incoherence in coupled chaotic systems, Phys. Rev. E 85, 026212 (2012).
Laing, C. R. The dynamics of chimera states in heterogeneous Kuramoto networks. Physica D 238, 15691588 (2009).
Martens, E. A. Bistable chimera attractors on a triangular network of oscillator populations. Phys. Rev. E 82, 016216 (2010).
Martens, E. A. Chimeras in a network of three oscillator populations with varying network topology. Chaos 20, 043122 (2010).
Wolfrum, M. & Omel’chenko, O. E. Chimera states are chaotic transients. Phys. Rev. E 84, 015201 (2011).
Sethia, G. C., Sen, A. & Atay, F. M. Clustered chimera states in delay-coupled oscillator systems. Phys. Rev. Lett. 100, 144102 (2008).
Waller, I. & Kapral, R. Spatial and temporal structure in systems of coupled nonlinear oscillators. Phys. Rev. A 30, 20472055 (1984).
Zakharova, A., Kapeller, M. & Scholl, E. Chimera death: Symmetry breaking in dynamical networks. Phys. Rev. Lett. 112, 154101 (2014).
Jaros, P., Maistrenko, Yu. & Kapitaniak, T. Chimera states on the route from coherence to rotating waves. Phys. Rev. E 91, 022907 (2015).
Dudkowski, D., Maistrenko, Yu. & Kapitaniak, T. Different types of chimera states: An interplay between spatial and dynamical chaos. Phys. Rev. E. 90, 032920 (2014).
Hagerstrom, A. M. et al. Experimental observations of chimera states in coupled-map lattices. Nat. Phys. 8, 658 (2012).
Tinsley, M. R., Nkomo, S. & Showalter, K. Chimera and phase-cluster states in populations of coupled chemical oscillators. Nat. Phys. 8, 662 (2012).
Martens, E. A., Thutupalli, S., Fourriere, A. & Hallatschek, O. Chimera states in mechanical oscillator networks. Proc. Nat. Acad. Sciences 110, 10563 (2013).
Larger, L., Penkovsky, B. & Maistrenko, Y. L. Virtual chimera states for delayed-feedback systems. Phys. Rev. Lett. 111, 054103 (2013).
Larger, L., Penkovsky, B. & Maistrenko, Yu. Laser chimeras as a paradigm for multistable patterns in complex systems. Nat. Commun. 6, 7752 (2015).
Kapitaniak, T., Kuzma, P., Wojewoda, J., Czolczynski, K. & Maistrenko, Yu . Imperfect chimera states for coupled pendula. Sci. Rep. 4, 6379 (2014).
Olmi, S., Martens, E. M., Thutupalli, S. & Torcini, A. Intermittent chaotic chimeras for coupled rotators. Phys. Rev. E. 92, 03090(R) (2015).
Ashwin, P. & Burylko, O. Weak chimeras in minimal networks of coupled phase oscillators. Chaos. 25, 013106 (2015).
Panaggio, M. J., Abrams, D. M., Ashwin, P. & Laing, C. Chimera states in networks of phase oscillators: the case of two small populations. Phys. Rev. E. 93, 012218 (2016).
Bick, Ch. & Ashwin, P. Chaotic Weak chimeras and their persistence in coupled populations of phase oscillators. Nonlinearity. 29, 1468 (2016).
Huygens, C. [Letter to de Sluse]. Oeuveres Completes de Christian Huygens (letters; no. 133 of 24 February 1665, no. 1335 of 26 February 1665, no. 1345 of 6 March 1665), (Societe Hollandaise DesSciences, Martinus Nijhor, La Haye, 1665).
Kapitaniak, M., Czolczynski, K., Perlikowski, P., Stefanski, A. & Kapitaniak, T. Synchronization of clocks. Phys. Rep. 517, 1–67 (2012).
Czolczynski, K., Perlikowski, P., Stefanski, A. & Kapitaniak, T. Clustering and Synchronization of Huygens’ Clocks. Physica A. 388, 5013–5023 (2009).
Kapitaniak, M. et al. Synchronization Thresholds of Coupled Self-Excited Nonidentical Pendula Suspended on the Vertically Displacing Beam. Progress of Theoretical Physics. 128, 1141–1173 (2012).
Acknowledgements
We thank B. Jagiello for the technical assistance in the experiments. This work has been supported by the Polish National Science Centre, MAESTRO Programme - Project No. 2013/08/A/ST8/00/780.
Author information
Authors and Affiliations
Contributions
Y.M. and T.K. initiated this work. K.C. performed the modeling and simulations. J.W. and T.K. designed the experiment. J.W. build experimental set up and performed experiments. J.W., K.C., Y.M. and T.K. wrote the paper.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Electronic supplementary material
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Wojewoda, J., Czolczynski, K., Maistrenko, Y. et al. The smallest chimera state for coupled pendula. Sci Rep 6, 34329 (2016). https://doi.org/10.1038/srep34329
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep34329
This article is cited by
-
Synchronization and chimeras in a network of photosensitive FitzHugh–Nagumo neurons
Nonlinear Dynamics (2021)
-
Stable chimeras of non-locally coupled Kuramoto–Sakaguchi oscillators in a finite array
Journal of the Korean Physical Society (2021)
-
Small amplitude chimeras for coupled clocks
Nonlinear Dynamics (2020)
-
Synchronization and chimera state in a mechanical system
Nonlinear Dynamics (2020)
-
Traveling chimera states for coupled pendula
Nonlinear Dynamics (2019)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
