
Abstract
The application of transformation optics to the development of intriguing electromagnetic devices can produce weakly anisotropic or isotropic media with the assistance of quasi-conformal and/or conformal mapping, as opposed to the strongly anisotropic media produced by general mappings; however, it is typically limited to two-dimensional applications. By addressing the conformal mapping between two manifolds embedded in three-dimensional space, we demonstrate that electromagnetic surface waves can be controlled without introducing singularity and anisotropy into the device parameters. Using fruitful surface conformal parameterization methods, a near-perfect conformal mapping between smooth manifolds with arbitrary boundaries can be obtained. Illustrations of concealing and illusions, including surface Luneburg and Eaton lenses and black holes for surface waves, are provided. Our work brings the manipulation of surface waves at microwave and optical wavelengths one step closer.
Similar content being viewed by others

Introduction
Since its inception in the design of electromagnetic cloaks1,2, transformation optics (TO) has proven to be a powerful tool to understand and customize the physics in acoustics3, optics4, mechanics5, and thermodynamics6,7, etc. Following the groundbreaking work of concealing objects, a number of other electromagnetic devices have been reported within the theoretical framework of TO, such as electromagnetic concentrators8,9, field rotators10, optical lenses11,12, and optical illusion devices13,14, to name a few. In practice, however, traditional TO often yields significant anisotropy in a designed medium15. Thus, metamaterials are often used to infer spatial changes from coordinate transformation geometry, which is based on the mathematical equivalence between geometry and material16.
To reduce the anisotropy of the functional medium induced by TO, various approaches have been developed. By constructing mapping in non-Euclidean space, for example, it is possible to remove singular points formed by traditional TO17, hence minimizing anisotropy. But for wavelengths comparable to the size of the transform region, non-Euclidean TO may perform even worse18; thus, several research projects focus on conformal or quasi-conformal mappings to achieve isotropy19. In \({{\mathbb{R}}}^{2}\), the concept of a carpet cloak that resembles a flat ground plane is successfully realized with an isotropic medium produced by minimizing the Modified-Liao functional under sliding boundary conditions20, or equivalently by constructing the quasi-conformal mapping by solving the inverse Laplace equations21. Although the concept of carpet cloak has been extended to \({{\mathbb{R}}}^{3}\) by extrusion or revolution of a two-dimensional refractive index profile to control the reflection of free-space waves, it is only applicable to surfaces with translational or rotational symmetry22.
Previous research has focused mainly on controlling propagating waves by TO, while less attention has been paid to the manipulation of surface waves12,23,24. Perfect surface wave concealing has been proposed by equating the optical path length of a ray traversing a flat plane with a homogeneous refractive index to the optical path on a curved surface with an angle-dependent refractive index for two orthogonal paths25,26, which have been experimentally validated27. Although an electrically large object may be hidden by such a concealing device with an inhomogeneous isotropic medium, this approach is limited to rotationally symmetric surfaces. By linking the governing eikonal equations on a virtual flat plane and on a curved surface by transformation optics, the projection mapping yields surface wave concealing for non-rotationally symmetric geometries but with high anisotropy14,28. Considerable effort has been devoted to reducing such anisotropy by employing efficient numerical conformal algorithms such as boundary first flattening (BFF)29, yet only surfaces with circular boundaries are investigated30.
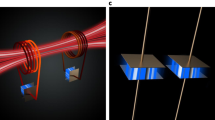
In this work, we show how to manipulate surface waves on smooth manifolds embedded in \({{\mathbb{R}}}^{3}\) within the framework of conformal TO, requiring an effective isotropic material under the regime of geometrical optics. Figure 1 illustrates a conformal surface mapping between two smooth manifolds in \({{\mathbb{R}}}^{2}\) and \({{\mathbb{R}}}^{3}\), i.e., \(f:{{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\to {{{{{{{\mathcal{M}}}}}}}}\). The curved manifold \({{{{{{{\mathcal{M}}}}}}}}\) shown in Fig. 1a has been uv-parameterized and the mesh grid can be considered as the mapping result of the Cartesian coordinate system \(({x}^{{\prime} },{y}^{{\prime} })\) in Fig. 1b. When the mapping is conformal or quasi-conformal, the face element dS remains right-angled, indicating that the elements are just scaled with little distortion. From the local coordinate systems on dS and \({{{{{{{\rm{d}}}}}}}}{S}^{{\prime} }\) (see Supplementary Fig. 1a in Supplementary Note 1), one can derive the Jacobian matrix J of the mapping f with two singular values σJ1 = σJ2 = σJ that state equal scaling in two orthogonal directions31. Consequently, an isotropic concealing medium distribution \(n=1/\sqrt{\det ({{{{{{{\bf{J}}}}}}}})}=1/{\sigma }_{{{{{{{{\rm{J}}}}}}}}}\) can be obtained based on the conformal TO19, representing the ratio of the line element \({{{{{{{\rm{d}}}}}}}}{l}^{{\prime} }\) in the virtual space to the scaled element dl in the physical space to compensate for the length of the optical path2. As a result, light propagating on curved \({{{{{{{\mathcal{M}}}}}}}}\) behaves as light propagating on flat \({{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\). In practice, it is more convenient to describe mesh vertices in \({{\mathbb{R}}}^{3}\) in a Cartesian coordinate system {x, y, z} and the Jacobian derived from the local coordinate system forms an asymmetric rank-two matrix J3 × 2. In addition, possible quasi-conformal mappings can be measured by the conformality, i.e., the ratio \(Q=\max ({\sigma }_{{{{{{{{\rm{J}}}}}}}}1}/{\sigma }_{{{{{{{{\rm{J}}}}}}}}2},{\sigma }_{{{{{{{{\rm{J}}}}}}}}2}/{\sigma }_{{{{{{{{\rm{J}}}}}}}}1})\). A unity ratio Q allows an effective concealing medium expressed as \({n}_{{{{{{{{\rm{concealment}}}}}}}}}=1/\sqrt{{\sigma }_{{{{{{{{\rm{J}}}}}}}}1}{\sigma }_{{{{{{{{\rm{J}}}}}}}}2}}\) for all elements of the face20.

a A red light beam that crosses a curved two-dimensional manifold \({{{{{{{\mathcal{M}}}}}}}}\) embedded in \({{\mathbb{R}}}^{3}\). b A red light beam that crosses a flat two-dimensional manifold \({{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\) in \({{\mathbb{R}}}^{2}\). The manifold \({{{{{{{\mathcal{M}}}}}}}}\) is uv-parameterized, and both manifolds are plotted with a coordinate grid. The manifold \({{{{{{{\mathcal{M}}}}}}}}\) from \({{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\) can be obtained by using a certain analytic or numerical mapping \(f:{{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\to {{{{{{{\mathcal{M}}}}}}}}\). The blue line element \({{{{{{{\rm{d}}}}}}}}{l}^{{\prime} }\) and the brown face element \({{{{{{{\rm{d}}}}}}}}{S}^{{\prime} }\) in \({{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\) are scaled to dl and dS in \({{{{{{{\mathcal{M}}}}}}}}\) after mapping f.
Results
Surface electromagnetic wave concealment
Having obtained a conformal mapping between the manifolds \({{{{{{{\mathcal{M}}}}}}}}\in {{\mathbb{R}}}^{3}\) and \({{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\in {{\mathbb{R}}}^{2}\), we first design an isotropic surface wave concealing device from the perspective of conformal TO and compare its performance with the traditional surface wave concealment with anisotropic medium14. Simulations were carried out on a double-camelback bump (see Supplementary Note 2 for details) with an elliptical base profile embedded in \({{\mathbb{R}}}^{3}\), as shown in Fig. 2. Compared to scattering when the surface has no index profile (see Supplementary Fig. 2a in Supplementary Note 1), one can observe that the surface wave concealment is successfully achieved by two distinct approaches: one induced by the projection mapping proposed in14 (Fig. 2a) and the other originates from the proposed quasi-conformal mapping (Fig. 2b). The corresponding material characteristics for the two types of concealing devices are displayed in Fig. 2c, indicating that the former is strongly anisotropic, while the latter is almost isotropic. In addition, the isotropic refractive index nc,double (the subscript “c” denotes the concealment, and “double” denotes the double-camelback bump) ranges from 0.83 to 1, which decreases as the bump height increases because a longer geometrical distance needs to be compensated by a smaller refractive index in order to attain equal optical path length. As references, simulation results of the concealment when the incident waves propagate along the y-axis and 45∘ from the x-axis (referred to as oblique incidence hereafter) are shown in Supplementary Fig. 3 in Supplementary Note 1.

Normalized electric field distribution of surface electromagnetic wave concealing devices achieved by a anisotropic relative permeability and b isotropic refractive index. c Components of anisotropic relative permeability, μxx, μyy, and μxy and isotropic refractive index n. Excitation is a z-polarized plane wave with a magnitude of ∣Ez∣ = 1 V/m; and the wavelength in free space is λ0 = 20 mm. The bump with a height of 1.25λ0 is located in the center of the square waveguide with a width of 12λ0. The white curves in a and b and the black curves in c depict the elliptical boundaries of double-camelback surfaces. The lengths of the semi-minor and semi-major axes are a = 3.75λ0 and b = 5λ0, respectively, along with the x- and y axes.
The proposed scheme based on conformal TO has achieved near-perfect surface wave concealing while eliminating the anisotropy in the transformation medium that the traditional scheme presents. The distribution of nc,double in Fig. 2c outlines an asymmetric geometric profile, showing that the effectiveness of this scheme is independent of any symmetry. Such an achievement requires mappings with high conformality rather than those bringing large distortion such as the projection mapping14. The numerical method we adopt here29 can obtain a quasi-conformal mapping with Q < 1.03, as shown in Supplementary Fig. 2b (see Supplementary Note 1), which is sufficient to design an effective isotropic concealing medium distribution.
Surface electromagnetic wave illusions
As the antithesis of concealment, optical illusion devices can reproduce the scattering characteristics of a specific object on other objects through a transformation medium13,14. Figure 3a depicts the surface electromagnetic wave scattered by a single-camelback bump \({{{{{{{\mathcal{M}}}}}}}}\) (see Supplementary Note 2 for details) filled with homogeneous material. Traditionally, if one wants to reproduce its scattering in a plane region \({{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\), the quasi-conformal mapping for designing the illusion device is \({f}^{{\prime} }:{{{{{{{\mathcal{M}}}}}}}}\to {{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\) with a Jacobian matrix Λ2 × 3. Figure 3b shows the accurately recurring scattering characteristics in the plane region \({{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\) filled with \({n}_{{{{{{{{\rm{i}}}}}}}},{{{{{{{\rm{plane}}}}}}}}}=1/\sqrt{{\sigma }_{\Lambda 1}{\sigma }_{\Lambda 2}}\) (the subscript ‘i’ denotes the illusion, and ‘plane’ denotes the plane region), where σΛ1 and σΛ2 are singular values of Λ2 × 3. Furthermore, Fig. 3c illustrates that the double-camelback bump filled with a carefully designed isotropic medium distribution can reproduce the same scattering pattern as shown in Fig. 3a. This illusion is realized by cascading two conformal mappings described in Supplementary Fig. 4 (see Supplementary Note 1), i.e., f1 from \({{\mathbb{R}}}^{3}\) (virtual space) to \({{\mathbb{R}}}^{2}\) (intermediate space), and f2 from \({{\mathbb{R}}}^{2}\) to \({{\mathbb{R}}}^{3}\) (physical space). Thus, the illusion medium for the double-camelback bump reads ni,double = ni,plane ⋅ nc,double. Figure 3d displays the profiles of ni,plane (for Fig. 3b) and ni,double (for Fig. 3c), respectively, which range from 1 to 1.25 (ni,plane) and from 0.85 to 1.21 (ni,double). The simulation results of the illusions for the oblique incidence and normal incidence along the y axis are provided in the Supplementary Note 1 (see Supplementary Fig. 5).

a Scattering on the single-camelback bump when filled with homogeneous medium. b Illusion of a single-camelback bump appearing in the plane. c Illusion of the single-camelback bump appearing on the double-camelback bump. d Isotropic refractive indices: ni,plane for the elliptic plane region and ni,double for the double-camelback bump. The bump with a height of 1.25λ0 is located in the center of the square waveguide with a width of 15λ0. The white curves in a–c and black curves in d depict the elliptical boundaries of the single-camelback surface, the plane region, and the double-camelback surface. The elliptical base profile is the same as that of Fig. 2.
The scattering pattern of the single-camelback bump (Fig. 3a) has been successfully reproduced in the plane region (Fig. 3b) and on the double-camelback bump (Fig. 3c), which demonstrates that the proposed scheme is a general solution to illusion design on smooth two-dimensional manifolds. The cascading method to construct mappings between manifolds embedded in \({{\mathbb{R}}}^{3}\) can even tackle surfaces with different base profiles, since a conformal mapping between simply connected regions in \({{\mathbb{R}}}^{2}\) exists according to the Riemann mapping theorem32. Furthermore, the quasi-conformal ratios Q of the two mappings for the double-camelback and single-camelback bump are smaller than 1.03 (see Supplementary Fig. 2b in Supplementary Note 1) and 1.012 (see Supplementary Fig. 6c in Supplementary Note 1), respectively, implicating that the cascaded mapping meets the requirement for high conformality. The range of ni,single (1 to 1.25) (the subscript “single” denotes the single-camelback bump) is the inverse of that of the concealing refractive index nc,single (0.8 to 1) shown in Supplementary Fig. 6b in Supplementary Note 1, because the illusion can be regarded as the inverse design of concealing such that the Jacobian matrices of their corresponding mappings are the Moore-Penrose pseudoinverses of each other31.
Surface wave Luneburg lens, Eaton lens, and black hole
Now that the wave behavior on the curved manifold can be manipulated flexibly, it is natural to consider designing various complicated devices on it, such as surface wave Luneburg lens, Eaton lens, and black hole for surface waves12,23,33,34. Traditional designs are usually based on spherical or circular profiles with a constant radius. For an elliptical profile without a constant radius, we adopt the distance from the point on the ellipse to the center or the coordinate origin as the generalized radius, i.e., \(R(\theta )=\sqrt{{(a\cos \theta )}^{2}+{(b\sin \theta )}^{2}}\), where \(\theta =\arctan (y/x)\) with (x, y) being the coordinates35,36,37. Thus, the refractive index of the considered Luneburg lens can be expressed as
where \(r=\sqrt{{x}^{2}+{y}^{2}}\). Similar to the traditional circular Luneburg lens, this distribution retains nL = 1 (the subscript “L” denotes the Luneburg lens) on the boundary and \({n}_{{{{{{{{\rm{L}}}}}}}}}=\sqrt{2}\) in the center r = 038. Next, the medium distribution of a Luneburg lens on the double-camelback bump can be expressed as nLuneburg = nc,double ⋅ nL. As illustrated in Fig. 4a, two Gaussian beams with a free-space wavelength λG = 50 mm (the subscript “G” denotes the Gaussian beam) and waist radius w0 = λG are incident along the x-direction at the position ± 0.8b in the y direction and reflected by the Luneburg lens to interfere at the focus point. The focal distance reads 20λG, which is identical to the unit circular Luneburg lens. For the Eaton lens, the refractive index nE (the subscript “E” denotes the Eaton lens) reads as
which can approach infinity when r = 0, leaving a singular point to be cared for. Figure 4b describes that a Gaussian beam that goes along the x-direction bends to the inverse x-direction after passing through the Eaton lens on the double-camelback bump. The proposed surface wave Luneburg and Eaton lenses may be deployed in optical imaging, signal acquisition, and novel designs for surface wave microwave antennas. Another functional device that can rotate beam propagation is the peripheral of the two-layer optical black hole, where light is compelled to travel in a spiral path into the absorbing medium at the core. The piece-wise refractive index distribution function nB (the subscript “B” denotes the black hole) can be expressed as
where \({r}_{{{{{{{{\rm{core}}}}}}}}}=0.4\) is the scaling factor of the internal ellipse core compared with the base profile and γ = 0.1 is the loss factor. The refractive index distribution nBlackhole = nc,double ⋅ nB on the double-camelback bump is depicted in Fig. 4d. The real part of the material parameters is matched on the inner boundary, and the imaginary part for absorbing energy ranging from 0.083 to 0.097 exists only in the core. The same Gaussian beam used for the Eaton lens is employed, and the result in Fig. 4c shows that the beam bends around 90∘ before it reaches the inner boundary and is absorbed by the lossy core without reflection, showing potential application in interference reduction and energy harvesting for electronic devices. As references, simulation results of the lenses when waves are incident along the y axis direction and 45∘ from x axis direction are illustrated in Supplementary Fig. 7 in Supplementary Note 1. Note that the overall sizes of the simulation models are larger than ten times the operating wavelength, demonstrating that the proposed scheme is capable of managing surface wave behaviors on electrically large objects. Moreover, the excellent performance of these functional surface wave devices demonstrates that, based on the proposed scheme, a variety of novel devices may be realized on smooth curved manifolds, which may facilitate the development of miniaturized and integrated photonic devices.

Gaussian beam is applied to demonstrate their functions. a The Luneburg lens, b the Eaton lens, and c the black hole on the double-camelback surface are designed by covering the concealment with a medium of devices. d Isotropic refractive indices: nLuneburg for the Luneburg lens, the decimal logarithm of nEaton for the Eaton lens, and the real and imaginary parts of nBlackhole for the black hole. The bump with a height of 5λG is located in the center of the square waveguide with a width of 48λG. The black curves in a–d depict the boundaries of double-camelback surfaces and the inner core of the black hole. The lengths of the semi-minor and semi-major axes of the elliptical base profile are a = 15λG and b = 20λG, respectively, along with the x and y axes. The red focal point of the Luneburg lens is located at a distance of 20λG from the center.
Discussion
Our theory and method are based on geometrical optics. It requires small curvature and little variation in wavelength (see Eqs. (7) and (8) in Methods), which can be expressed as
where Rij is the Ricci curvature tensor, K is the Gaussian curvature, and gij is the metric tensor. Both the wavelength index w and the curvature index ρ are inversely proportional to the powers of the refractive index n. To prevent w and ρ from drastically increasing, a height lower than half of the base radius is favorable, and thereby the optical path length can be compensated for with a nearly uniform refractive index. On this basis, requirements Eqs. (4) and (5) demand a shorter wavelength λ0 and a smoother geometric structure to ease the change rate ∣ ∇n∣ and the Gaussian curvature K. As a negative example, a hemisphere surface wave concealment is reviewed and results are displayed in Supplementary Fig. 8 in Supplementary Note 1, whose refractive index \({n}_{{{{{{{{\rm{c}}}}}}}},{{{{{{{\rm{sphere}}}}}}}}}\) is between 0.5 and 1 (see Supplementary Fig. 8d) and the maximum of quasi-conformal ratio Q is smaller than 1.012 (see Supplementary Fig. 8e). The visible scattering Ez − Ebz (the subscript “b” denotes the background field) appearing in the plane in Supplementary Fig. 8c demonstrates the failure of geometrical optics due to the high curvature index ρ > 20 residing in the right-angle connection between the hemisphere and the plane, as shown in Supplementary Fig. 8f, and the average curvature index \(\bar{\rho }=1.57\) is also higher than 1. The non-smooth connection causes the phase distortion in the backward scattering (see Supplementary Note 3 for the details), and the maximum of the forward scattering \({| {E}_{z}-{E}_{{{{{{{{\rm{b}}}}}}}}z}| }_{\max }=0.75\,{{{{{{{\rm{V}}}}}}}}/{{{{{{{\rm{m}}}}}}}}\) implies a phase difference \(\arcsin (0.75)=48.{6}^{\circ }\) resulted from the reconstruction of wave fronts. In comparison, Supplementary Fig. 2c and Supplementary Fig. 6d display the average curvature index \(\bar{\rho }=0.54\) for double-camelback bump and \(\bar{\rho }=0.39\) for single-camelback bump, respectively, both satisfying the requirement Eq. (5) and leaving near-zero ρ on smooth boundaries. It may be noticed that the wavelength index w for the concealing devices shown in Supplementary Fig. 2d, Supplementary Fig. 6e, and Supplementary Fig. 8g is smaller than unity everywhere because it is related to lower powers of λ0 and n; thus, it is much easier to meet the requirement of Eq. (4) compared to Eq. (5). These selected curvature and wavelength characteristics that validate the approximation of geometrical optics are indispensable for the excellent performance of electromagnetic devices.
The isotropic case that determines the expression of requirements Eqs. (4) and (5) is based on the conformal or quasi-conformal mappings between two-dimensional manifolds. Benefiting from the rapid development in conformal parameterization, a series of mapping methods can be used to design surface wave concealment29,39,40. The BFF method29 adopted in our study can establish near-perfect conformal mappings not only between smooth manifolds but also surfaces with cuspidal points, such as sharp corners and cone singularities, offering exhilarating promise for wave manipulation on more complicated surfaces. In addition, there are algorithms aimed at constructing quasi-conformal mappings between high-genus manifolds41,42, which can be used to deal with phase regulation on surfaces with holes. One noteworthy idea is to map a high-genus surface to a zero-genus plane region by transforming holes into slits43,44 which implies the possibility for the scheme conducted in simply connected regions to manipulate wave behaviors on multiple connected surfaces. In addition, it should be pointed out that high conformality of the mapping always relies on the surface parameterization algorithms and intrinsic curing degree of geometries (see Supplementary Note 4 for a detailed discussion). By reasonably utilizing advanced algorithms for a variety of particular cases, our method has the potential to be a universal scheme for controlling surface electromagnetic waves on an arbitrary two-dimensional manifold.
Conclusions
In summary, we have proposed a general method to manipulate electromagnetic waves on smooth two-dimensional manifolds without rotational symmetry by means of a certain isotropic refractive index distribution derived from the quasi-conformal mapping. The relationship between medium and mappings is induced from the wave equation on the manifold under the geometrical optics approximation. Numerical quasi-conformal algorithms are introduced to construct mappings between manifolds, and consequent functional mediums are validated by concealing surfaces and generating illusions on plane regions. By cascading mappings between \({{\mathbb{R}}}^{2}\) and \({{\mathbb{R}}}^{3}\) to obtain a mapping between \({{\mathbb{R}}}^{3}\), we succeed in reproducing the scattering of a surface on another surface. In addition, functional devices such as surface Luneburg lenses, surface Eaton lenses, and black holes for surface waves are designed based on carpet cloaks. Finally, the indices required by geometrical optics are reviewed to demonstrate the validity of the approximation on simulation models. Our method paves the way for the regulation of surface electromagnetic waves on any two-dimensional manifold and can be utilized to control surface waves in other fields, such as acoustics, mechanics, and thermodynamics.
Methods
Conformal transformation optics for surface waves
Wave equation on curved manifold
The concept of transformation medium comes from the equivalence between geometry and media. Within the Einstein summation convention, Maxwell’s wave equation for the electric field \({\nabla }_{{{{{{{{\mathcal{M}}}}}}}}}\times {\nabla }_{{{{{{{{\mathcal{M}}}}}}}}}\times {{{{{{{\bf{E}}}}}}}}-{\mu }_{0}{\varepsilon }_{0}{\partial }_{t}^{2}{{{{{{{\bf{E}}}}}}}}=0\) in free space can be expressed as ref. 16
where \({c}_{0}=1/\sqrt{{\mu }_{0}{\varepsilon }_{0}}\) is the light velocity in free space; Rij is the Ricci tensor of the considered geometry \({{{{{{{\mathcal{M}}}}}}}}\). Supposing that electromagnetic waves are confined near a curved surface \({{{{{{{\mathcal{M}}}}}}}}\) embedded in \({{\mathbb{R}}}^{3}\) as surface waves, its local plane wave solution reads \({E}_{i}={{{{{{{{\mathscr{E}}}}}}}}}_{i}\exp ({{{{{{{\rm{i}}}}}}}}\varphi )\) with constant complex amplitudes \({{{{{{{{\mathscr{E}}}}}}}}}_{i}\), where the phase reads φ = k ⋅ r − ωt with the wave vector \({{{{{{{\bf{k}}}}}}}}={\nabla }_{{{{{{{{\mathcal{M}}}}}}}}}\varphi\) and angular frequency ω = − ∂tφ. For surface waves, the wave vector k lies in the tangent space of the curved surface \({{{{{{{\mathcal{M}}}}}}}}\), i.e., \({{{{{{{\bf{k}}}}}}}}\in {{{{{{{\mathcal{T}}}}}}}}({{{{{{{\mathcal{M}}}}}}}})\). Thus, Eq. (6) can be simplified and approximated in the regime of geometrical optics where the wavelength λ = 2π/k varies slowly with distance, i.e.,
In addition, the effective curvature of the curved surface should be small enough compared to the wavelength so that the assumption of locally plane waves is valid, i.e.,
As a result, inserting \({E}_{i}={{{{{{{{\mathscr{E}}}}}}}}}_{i}\exp ({{{{{{{\rm{i}}}}}}}}\varphi )\) into Eq. (6) and considering that the (spatial and temporal) derivatives of \({{{{{{{{\mathscr{E}}}}}}}}}_{i}\) vanish, one can obtain the dispersion relation for the surface wave propagating on \({{{{{{{\mathcal{M}}}}}}}}\), which reads as
Here, gij is the induced metric tensor for the curved surface \({{{{{{{\mathcal{M}}}}}}}}\), which can be determined from the transformation of the Jacobian matrix from the manifold \({{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\) in \({{\mathbb{R}}}^{2}\) to \({{{{{{{\mathcal{M}}}}}}}}\)31.
Wave equation on a flat plane
Alternatively, if \({{{{{{{\mathcal{M}}}}}}}}\) is flat (i.e., Rij = 0) and filled with anisotropic medium denoted by relative permeability tensor μij, Eq. (6) becomes
Suppose that the electromagnetic waves are confined near \({{{{{{{\mathcal{M}}}}}}}}\) and the electric field E is perpendicularly polarized. In a Cartesian coordinate system, if \({{{{{{{\mathcal{M}}}}}}}}\) can be placed in the xy plane, we focus on the case that the electric field vector E lies in the normal space of the flat plane \({{{{{{{\mathcal{M}}}}}}}}\), i.e., \({{{{{{{\bf{E}}}}}}}}\in {{{{{{{\mathcal{N}}}}}}}}({{{{{{{\mathcal{M}}}}}}}})\), and the global wave solution may read \({E}_{z}={{{{{{{{\mathscr{E}}}}}}}}}_{z}\exp ({{{{{{{\rm{i}}}}}}}}\varphi )\). Thus, the phase φ is independent of z and the wave vector lies on the plane as k = (kx, ky, 0), because a flat plane coincides with its tangent space. Since the flat manifold \({{{{{{{\mathcal{M}}}}}}}}\) has a zero curvature tensor, the condition Eq. (8) holds naturally. Once the other condition Eq. (7) is satisfied that the wavelength varies slowly, one may disregard the derivatives of the complex amplitude after inserting \({E}_{z}={{{{{{{{\mathscr{E}}}}}}}}}_{z}\exp ({{{{{{{\rm{i}}}}}}}}\varphi )\) into Eq. (10) and obtain the dispersion relation for the surface wave propagating on \({{{{{{{\mathcal{M}}}}}}}}\), which reads \(({\mu }_{xx}{k}_{x}^{2}+2{\mu }_{xy}{k}_{x}{k}_{y}+{\mu }_{yy}{k}_{y}^{2})/\det ({{{{{{{\boldsymbol{\mu }}}}}}}})={\omega }^{2}/{c}_{0}^{2}\). By excluding consideration of the particular polarization, the dispersion equation can be recast within the Einstein summation convention as
Transformation medium and geometry
For electromagnetic waves that behave identically on two manifolds, one can obtain the equivalence between geometry and material properties by comparing Eqs. (9) and (11), which yields
The relative permeability tensor μij actually creates an illusion in the flat plane because a spatial point filled with medium μ is equivalent to a metric \({{{{{{{\bf{g}}}}}}}}=\det ({{{{{{{\boldsymbol{\mu }}}}}}}}){{{{{{{{\boldsymbol{\mu }}}}}}}}}^{-1}\). If the local Cartesian coordinate system at this point is aligned along the orthogonal eigenvectors of μ, the real and symmetric permeability tensor reduces to diag(μx, μy, μz) so that the square of the line element in the direction x is ds2 = gxxdx2 = μyμzdx2, which is also the square of the optical path length in the curved free space. Compared to \({{{{{{{\rm{d}}}}}}}}{s}^{2}={n}_{x}^{2}{{{{{{{\rm{d}}}}}}}}{x}^{2}\) in the flat manifold, one can derive \({n}_{x}^{2}={\mu }_{y}{\mu }_{z}\) and similar results in the y and z directions. Consequently, the relationship between the relative permeability tensor μ and the refractive index tensor n may be expressed as \({{{{{{{{\bf{n}}}}}}}}}^{2}=\det ({{{{{{{\boldsymbol{\mu }}}}}}}}){{{{{{{{\boldsymbol{\mu }}}}}}}}}^{-1}\) and one may further obtain
by referring to Eq. (12). In a similar manner, the transformation medium can be obtained for Hz polarization. We stress that the proposed design method is polarization-independent (see Supplementary Note 5 for details).
Surface transformation and TO medium
The metric tensor in equation Eq. (13) is induced by the mapping \(f:{{{{{{{{\mathcal{M}}}}}}}}}^{{\prime} }\to {{{{{{{\mathcal{M}}}}}}}}\) and can be constructed by the Jacobian matrix J3 × 2 as g = JTJ31. Nevertheless, we prefer to associate nillusion with the Jacobian matrix Λ2 × 3 that represents the transformation from \({{\mathbb{R}}}^{3}\) (virtual space) to \({{\mathbb{R}}}^{2}\) (physical space). Actually, the asymmetric Jacobian matrices J3 × 2 and Λ2 × 3 can be denoted as the Moore-Penrose pseudoinverse of each other31, i.e., J = Λ†, where the superscript ‘†’ denotes the pseudoinverse. Thus, one can rewrite the equivalence Eq. (13) as
Similar relationship can be obtained for concealing medium nconcealment and corresponding Jacobian matrix J3 × 2 from \({{\mathbb{R}}}^{2}\) (virtual space) to \({{\mathbb{R}}}^{3}\) (physical space) as
For the mapping between \({{\mathbb{R}}}^{3}\) (Supplementary Fig. 4), which is formed by cascading two transformations between \({{\mathbb{R}}}^{3}\) and \({{\mathbb{R}}}^{2}\), the consequent medium for the illusion can be recast as the combination of the concealing and illusion refractive index tensors, i.e.,
where Λ1 and J2 are Jacobian matrices for mappings f1 and f2, as illustrated in Supplementary Fig. 4, respectively. In particular, when the mappings are conformal, the refractive index becomes isotropic and the corresponding Jacobian matrix has two identical singular values. Taking the determinants of Eqs. (14) and (15), the refractive indices can be denoted by singular values of the Jacobian matrices as nconcealment = 1/σJ and nillusion = 1/σΛ.
Discrete conformal mapping and transformation medium
Review on discrete conformal mapping
It has been demonstrated that an isotropic refractive index distribution can be achieved by solving equations for equal optical path length only on rotationally symmetric surfaces25. Regarding the non-rotationally symmetric concealing device, high anisotropy is introduced by the projection mapping that distorts the coordinate grid14. However, numerical algorithms for surface parameterization provide possible conformal mappings for arbitrary surfaces. For example, the angle-based flattening method45,46 has been proposed to construct conformal parameterization by minimizing a punishing functional to decrease angular distortion, while its non-linearity reduces computational efficiency. In addition, the so-called least squares method47 and the spectral method48 have been introduced to achieve higher efficiency, benefiting from their linearity. Their disadvantages are free target boundaries and non-bijectivity, whereas we expect a one-to-one mapping that includes every point in physical and virtual space with controlled boundaries. Further research, such as disk conformal mapping40, has been reported as a linear and bijective conformal mapping method but with a fixed disk boundary. Not until BFF29 enabled editing of the boundary as demand was the drawbacks totally eliminated. To deal with a certain electromagnetic circumstance, an appropriate algorithm could be chosen from the preceding techniques49,50.
Triangulation and Jacobian matrices
Supposing that the conformal mapping reads \({f}_{1}:{{{{{{{{\mathcal{M}}}}}}}}}_{2}\to {{{{{{{{\mathcal{M}}}}}}}}}_{1}\) (or \({f}_{2}:{{{{{{{{\mathcal{M}}}}}}}}}_{1}\to {{{{{{{{\mathcal{M}}}}}}}}}_{2}\)) between manifolds \({{{{{{{{\mathcal{M}}}}}}}}}_{1}\subset {{\mathbb{R}}}^{3}\) and \({{{{{{{{\mathcal{M}}}}}}}}}_{2}\subset {{\mathbb{R}}}^{2}\), as shown in Supplementary Fig. 1a, one can find that a simplex \({{{{{{{{\mathcal{S}}}}}}}}}_{1}\) in meshed \({{{{{{{{\mathcal{M}}}}}}}}}_{1}\) and its counterpart in meshed \({{{{{{{{\mathcal{M}}}}}}}}}_{2}\) are a pair of similar triangles, which allows \({{{{{{{{\mathcal{S}}}}}}}}}_{1}\) and \({{{{{{{{\mathcal{S}}}}}}}}}_{2}\) to share a same barycentric coordinate system. This local coordinate system, as shown in Supplementary Fig. 1b, can represent any point inside the simplex as the linear combination of three vertices and helps quickly induce the Jacobian matrix of numerical mappings based on triangular mesh parameterization. For example, the location of the point \({{{{{{{\bf{q}}}}}}}}({x}^{{\prime} },{y}^{{\prime} })\) on \({{{{{{{{\mathcal{S}}}}}}}}}_{2}\) can be expressed as \({x}^{{\prime} }=\mathop{\sum }\nolimits_{i = 1}^{3}{\lambda }_{i}{x}_{i}^{{\prime} }\) and \({y}^{{\prime} }=\mathop{\sum }\nolimits_{i = 1}^{3}{\lambda }_{i}{y}_{i}^{{\prime} }\) with λ1 + λ2 + λ3 = 1, i.e., a linear combination of vertices \({{{{{{{{\bf{q}}}}}}}}}_{1}({x}_{1}^{{\prime} },{y}_{1}^{{\prime} })\), \({{{{{{{{\bf{q}}}}}}}}}_{2}({x}_{2}^{{\prime} },{y}_{2}^{{\prime} })\) and \({{{{{{{{\bf{q}}}}}}}}}_{3}({x}_{3}^{{\prime} },{y}_{3}^{{\prime} })\). For the triangulation mesh, we can obtain the barycentric coordinates, which read as
where \(\det ({{{{{{{\bf{M}}}}}}}})= \det ([{{{{{{{{\bf{q}}}}}}}}}_{1}-{{{{{{{{\bf{q}}}}}}}}}_{3}, {{{{{{{{\bf{q}}}}}}}}}_{2}-{{{{{{{{\bf{q}}}}}}}}}_{3}]) = (x'_1-x'_3)(y'_2-y'_3) + (x'_3-x'_2)(y'_1 - y'_3)\), with \({{{{{{{{\bf{q}}}}}}}}}_{i}({x}_{i}^{{\prime} },{y}_{i}^{{\prime} })\) being the i-th vertices (i = 1, 2, 3). Here, Eqs. (17), (18), and (19) show that the barycentric coordinate system (λ1, λ2, λ3) can be expressed by the Cartesian coordinate system \(({x}^{{\prime} },{y}^{{\prime} })\). Regarding the point p(x, y, z) on \({{{{{{{{\mathcal{S}}}}}}}}}_{1}\subset {{\mathbb{R}}}^{3}\), mapped from the point q in \({{\mathbb{R}}}^{2}\), we have \(x=\mathop{\sum }\nolimits_{i = 1}^{3}{\lambda }_{i}{x}_{i}\), \(y=\mathop{\sum }\nolimits_{i = 1}^{3}{\lambda }_{i}{y}_{i}\) and \(z=\mathop{\sum }\nolimits_{i = 1}^{3}{\lambda }_{i}{z}_{i}\) as the linear combination of p1(x1, y1, z1), p2(x2, y2, z2) and p3(x3, y3, z3), since \({{{{{{{{\mathcal{S}}}}}}}}}_{1}\) and \({{{{{{{{\mathcal{S}}}}}}}}}_{2}\) share the same barycentric coordinates λi. As a result, the Jacobian matrix J3 × 2 of the mapping from \({{{{{{{{\mathcal{S}}}}}}}}}_{2}\subset {{\mathbb{R}}}^{2}\) to \({{{{{{{{\mathcal{S}}}}}}}}}_{1}\subset {{\mathbb{R}}}^{3}\) can be derived according to the derivatives of (λ1, λ2, λ3) with respect to \(({x}^{{\prime} },{y}^{{\prime} })\), which reads as
Similarly, one can derive the Jacobian matrix Λ2 × 3 of the numerical mapping from \({{{{{{{{\mathcal{S}}}}}}}}}_{1}\) to \({{{{{{{{\mathcal{S}}}}}}}}}_{2}\); alternatively, one can calculate the Moore-Penrose pseudoinverse of J3 × 2 as Λ2 × 331. By calculating the Jacobian matrices J3 × 2 or Λ2 × 3 on each simplex, the information on the mapping f1 or f2 can be fully described.
Simulation methods
The wave behavior of electromagnetic devices is simulated using the finite element method. The geometric model is an optical thin film waveguide whose thickness is less than one-fifth of the wavelength. On the outer surfaces of the waveguide, the perfect electric conductor boundary condition is applied to emulate the propagation of the surface wave on a two-dimensional manifold. Thus, the propagation of the plane wave or Gaussian beam is restricted within the optical thin film. To mimic an open and non-reflecting infinite domain, perfectly matched layers are applied on the boundary of the propagating plane. The designed medium is configured to the waveguide as a fitting function interpolated from the discrete data set calculated on extra-dense meshes.
Data availability
All data needed to evaluate the conclusions in the paper are presented in the paper and/or the Supplementary Materials. Raw data and corresponding simulation data are available upon reasonable request.
Code availability
The code developed in this study is available from the authors upon reasonable request.
References
Pendry, J. B., Schurig, D. & Smith, D. R. Controlling electromagnetic fields. Science 312, 1780–1782 (2006).
Leonhardt, U. Optical conformal mapping. Science 312, 1777–1780 (2006).
Chen, H. & Chan, C. Acoustic cloaking in three dimensions using acoustic metamaterials. Appl. Phys. Lett. 91, 183518–183518 (2007).
Wang, X. et al. Self-focusing and the talbot effect in conformal transformation optics. Phys. Rev. Lett. 119, 033902 (2017).
Genov, D., Zhang, S. & Zhang, X. Mimicking celestial mechanics in metamaterials. Nat. Phys. 5, 687–692 (2009).
Guenneau, S., Amra, C. & Veynante, D. Transformation thermodynamics: cloaking and concentrating heat flux. Opt. Express 20, 8207–8218 (2012).
Raza, M., Liu, Y., Lee, E. & Ma, Y. Transformation thermodynamics and heat cloaking: a review. J. Opt. 18, 044002 (2016).
Rahm, M. et al. Design of electromagnetic cloaks and concentrators using form-invariant coordinate transformations of maxwell’s equations. Photon. Nanostruct. Fundam. Appl. 6, 87–95 (2008).
Sadeghi, M. M., Li, S., Xu, L., Hou, B. & Chen, H. Transformation optics with Fabry-Pérot resonances. Sci. Rep. 5, 1–7 (2015).
Luo, Y., Chen, H., Zhang, J., Ran, L. & Kong, J. A. Design and analytical full-wave validation of the invisibility cloaks, concentrators, and field rotators created with a general class of transformations. Phys. Rev. B 77, 125127 (2008).
Perczel, J. & Leonhardt, U. Partial transmutation of singularities in optical instruments. N. J. Phys. 13, 1005–1008 (2008).
Liu, Y., Zentgraf, T., Bartal, G. & Zhang, X. Transformational plasmon optics. Nano Lett. 10, 1991–7 (2010).
Lai, Y. et al. Illusion optics: the optical transformation of an object into another object. Phys. Rev. Lett. 102, 253902 (2009).
McManus, T., Valiente Kroon, J., Horsley, S. & Hao, Y. Illusions and cloaks for surface waves. Sci. Rep. 4, 5977 (2014).
Schurig, D. et al. Metamaterial electromagnetic cloak at microwave frequencies. Science 314, 977–980 (2006).
Leonhardt, U. & Philbin, T. Geometry and light: the science of invisibility. 2013 Conf. Lasers Electro-Opt. Eur. - Int. Quantum Electron. Conf. (2013).
Leonhardt, U. & Tyc, T. Broadband invisibility by non-Euclidean cloaking. Science 323, 110–112 (2009).
Tyc, T., Chen, H., Chan, C. T. & Leonhardt, U. Non-Euclidean cloaking for light waves. IEEE J. Sel. Top. Quantum Electron. 16, 418–426 (2010).
Xu, L. & Chen, H. Conformal transformation optics. Nat. Photonics 9, 15–23 (2015).
Li, J. & Pendry, J. B. Hiding under the carpet: a new strategy for cloaking. Phys. Rev. Lett. 101, 203901 (2008).
Zheng, C., Zhou, X., Hu, J. & Hu, G. Design method for quasi-isotropic transformation materials based on inverse Laplace’s equation with sliding boundaries. Opt. Express 18, 6089–6096 (2010).
Landy, N., Kundtz, N. & Smith, D. Designing three-dimensional transformation optical media using quasiconformal coordinate transformations. Phys. Rev. Lett. 105, 193902 (2010).
Zentgraf, T., Liu, Y., Mikkelsen, M., Valentine, J. & Zhang, X. Plasmonic luneburg and eaton lenses. Nat. Nanotechnol. 6, 151–5 (2011).
Vakil, A. & Engheta, N. Transformation optics using graphene. Science 332, 1291–4 (2011).
Mitchell Thomas, R. C., McManus, T. M., Quevedo-Teruel, O., Horsley, S. A. R. & Hao, Y. Perfect surface wave cloaks. Phys. Rev. Lett. 111, 213901 (2013).
Mitchell Thomas, R., Quevedo Teruel, O., Sambles, J. & Hibbins, A. Omnidirectional surface wave cloak using an isotropic homogeneous dielectric coating. Sci. Rep. 6, 30984 (2016).
La Spada, L. et al. Surface wave cloak from graded refractive index nanocomposites. Sci. Rep. 6, 29363 (2016).
McManus, T. M., Spada, L. L. & Hao, Y. Isotropic and anisotropic surface wave cloaking techniques. J. Opt. 18, 044005 (2016).
Sawhney, R. & Crane, K. Boundary first flattening. ACM Trans. Graph. 37, 1–14 (2017).
Xu, L., Ge, H., Li, J., He, R. & Chen, H. Conformal landscape of a two-dimensional gradient refractive-index profile for geometrical optics. Phys. Rev. Appl. 13, 054007 (2020).
Hormann, K., Levy, B. & Sheffer, A. Mesh parameterization: theory and practice. ACM SIGGRAPH. Int. Conf. Comput. Graph. Interact. Techn. 12, 1–87 (2008).
Floater, M. & Hormann, K. Advances in multiresolution for geometric modelling (Springer Berlin Heidelberg, 2005).
Narimanov, E. & Kildishev, A. Optical black hole: broadband omnidirectional light absorber. Appl. Phys. Lett. 95, 041106 (2009).
Dockrey, J. A. et al. Thin metamaterial luneburg lens for surface waves. Phys. Rev. B 87, 125137 (2013).
Grzesik, J. A. Focusing properties of a three-parameter class of oblate, luneburg-like inhomogeneous lenses. J. Electromagn. 19, 1005–1019 (2005).
Demetriadou, A. & Hao, Y. Slim luneburg lens for antenna applications. Opt. Express 19, 19925–19934 (2011).
Gómez Correa, J., Coello, V., Garza Rivera, A., Puente, P. & Chávez-Cerda, S. Three-dimensional ray tracing in spherical and elliptical generalized luneburg lenses for application in the human eye lens. Appl. Opt. 55, 2002 (2016).
Luneburg, R., Wolf, E. & Herzberger, M. Mathematical theory of optics (University of California, 1964).
Springborn, B., Schröder, P. & Pinkall, U. Conformal equivalence of triangle meshes. ACM Trans. Graph. 27, 1–11 (2008).
Choi, P. T. & Lui, L. M. Fast disk conformal parameterization of simply-connected open surfaces. J. Sci. Comput. 65, 1065–1090 (2015).
Zhang, M., Li, Y., Zeng, W. & Gu, X. Canonical conformal mapping for high genus surfaces with boundaries. Comput. Graph. 36, 417–426 (2012).
Choi, G. Efficient conformal parameterization of multiply-connected surfaces using quasi-conformal theory. J. Sci. Comput. 87, 70 (2021).
Falai, C. & Bert, J. Advances in geometric modeling and processing. J. Molluscan Stud. 76, 404–406 (2010).
W. K. Sangawi, A., Murid, A. & Lee, K. W. Circular slit maps of multiply connected regions with application to brain image processing. Bull. Malaysian Math. Sci. Soc. 44 171–202 (2020).
Sheffer, A. & de Sturler, E. Parameterization of faceted surfaces for meshing using angle-based flattening. Eng. Comput. 17, 326–337 (2001).
Sheffer, A., Lévy, B., Mogilnitsky, M. & Bogomyakov, A. Abf++: fast and robust angle based flattening. ACM Trans. Graph. 24, 311–330 (2005).
Lévy, B., Petitjean, S., Ray, N. & Maillot, J. Least squares conformal maps for automatic texture atlas generation. ACM Trans. Graph. 21, 362–371 (2002).
Mullen, P., Tong, Y., Alliez, P. & Desbrun, M. Spectral conformal parameterization. Comp. Graph. Forum 27, 1487–1494 (2008).
Botsch, M., Kobbelt, L., Pauly, M., Alliez, P. & Levy, B. Polygon mesh processing (A. K. Peters, 2010).
Gu, X., Luo, F. & Yau, S.-T. Computational conformal geometry behind modern technologies. Not. Am. Math. Soc. 67, 1 (2020).
Acknowledgements
This work is supported by the National Natural Science Foundation of China (NSFC) under grant no. 51977165.
Author information
Authors and Affiliations
Contributions
X.Z. and T.D. conceived the idea. X.Z., H.D., X.G., and T.D. designed the methodology. X.Z., H.D., and X.G. contributed equally to simulation, investigation and results visualization. X.M. and T.D. supervised the project. All authors contributed to the writing, review, and editing of the article.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Physics thanks Martin McCall and the other, anonymous, reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhao, X., Deng, H., Gao, X. et al. Controlling electromagnetic surface waves with conformal transformation optics. Commun Phys 6, 201 (2023). https://doi.org/10.1038/s42005-023-01322-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s42005-023-01322-w
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
