
Abstract
This research focuses on bifurcation analysis and new waveforms for the first fractional 3D Wazwaz–Benjamin–Bona–Mahony (WBBM) structure, which arises in shallow water waves. The linear stability technique is also employed to assess the stability of the mentioned model. The suggested equation’s dynamical system is obtained by applying the Galilean transformation to achieve our goal. Subsequently, bifurcation, chaos, and sensitivity analysis of the mentioned model are conducted by applying the principles of the planar dynamical system. We obtain periodic, quasi-periodic, and chaotic behaviors of the mentioned model. Furthermore, we introduce and delve into diverse solitary wave solutions, encompassing bright soliton, dark soliton, kink wave, periodic waves, and anti-kink waves. These solutions are visually presented through simulations, highlighting their distinct characteristics and existence. The results highlight the effectiveness, brevity, and efficiency of the employed integration methods. They also suggest their applicability to delving into more intricate nonlinear models emerging in modern science and engineering scenarios. The novelty of this research lies in its detailed analysis of the governing model, which provides insights into its complex dynamics and varied wave structures. This study also advances the understanding of nonlinear wave properties in shallow water by combining bifurcation analysis, chaotic behavior, waveform characteristics, and stability assessments.
Similar content being viewed by others
Introduction
Nonlinear evolution equations play an important role in nonlinear science owing to their wide variety of applications. These equations describe many complex phenomena, including fluids1,2, human diseases3, heat transfer mechanism4,5,6, shallow water wave7, magnetohydrodynamics8,9, aerodynamics10, plasma physics11,12,13, molecular biology14, telecommunications15, nonlinear optics16,17, condensed matter physics18,19, and more20,21,22. Therefore, soliton solutions to nonlinear models are highly attractive23,24. The existence of these soliton outcomes is demonstrated in many distinguished nonlinear models like the Jimbo–Miwa equation25, Phi-4 model26, the Konopelchenko–Dubrovsky system27, the fractional 3D WBBM model28, the Fokas-Lenells model29, the LPD equation30, Kundu–Mukherjee–Naskar model31, predator–prey equation32, and various others33,34,35. Several effective methodologies exist for solving these nonlinear models and obtaining soliton results. These approaches encompass the expansion technique involving the Kudryashov approach36, the unified scheme37, the modified extended tanh approach38, the \((G'/G,1/G)\) algorithm39, the Hirota bilinear process40, the \((\frac{G'}{G^2})\) expansion process41,42, the extended ShGEEM methodology43, and the references therein44,45,46.
Bifurcation analysis is a powerful tool in the study of dynamic systems and holds significant implications across diverse domains47,48,49. Liu and Li50 introduced the bifurcation method in 2002, a potent tool for investigating the dynamic properties of partial differential equations. It is especially effective in analyzing bifurcation phenomena and obtaining exact traveling wave solutions. It examines how a system’s qualitative behavior changes by varying its parameters51. This analysis helps researchers understand how systems transition between stable and unstable states or chaotic behavior. The key objective of this writing is to investigate bifurcation analysis and new waveforms within the first fractional 3D-WBBM28 nonlinear framework.
This research addresses a gap in understanding the behavior of the first fractional WBBM equation in shallow water wave dynamics, which has applications in coastal engineering, tsunami forecasting, and oceanic modeling. This study offers insights into the complex dynamics of these waves through advanced analytical and computational methods, including dark solitons, bright solitons, periodic waves, and kink waves. These findings enhance predictive models and decision-making processes in related fields, which significantly contribute to advancing knowledge of nonlinear wave dynamics and its practical applications.
By applying the techniques proposed for Eq. (7), this study provided novel findings that had not formerly been reported.
The structure of the existent investigation is outlined as follows: “Conformable derivative and its features” section contains the conformable derivative and its features. In “Suggested model” and “Ordinary differential form of the suggested model” sections cover the descriptions and the ordinary differential form of the governing model, respectively. Bifurcation analysis is detailed in “Bifurcation analysis” section. In “Chaotic behaviors” section, the chaotic natures of the stated model are presented. In “Sensitivity analysis” section encompasses the sensitivity analysis of the suggested model. In “Bright and dark solitons of the WBBM model” section provides dark and bright solitons of the mentioned model. The discussion of the results is contained in “Discussion of results” section. Stability analysis is given in “Stability analysis” section. In “Novelty of the outcomes” section discusses the novelty of the outcomes. Lastly, “Conclusion” section encapsulates the findings drawn from this study.
Conformable derivative and its features
If we assume a real function \(q:[0,\infty ]\rightarrow {\mathbb {R}}\), then for all \(t>0\) and \(\alpha \in (0,1]\), the conformable fractional derivative of q(t) takes the next form55:
Now, we describe some remarkable features of fractional derivatives. Let q(t) and r(t) are \(\alpha\)-conformable differentiable whilst \(t>0\) with \(\alpha \in (0,1]\). Then
-
(i)
\(D_t^{\alpha }t^n=nt^{n-\alpha }\) for all \(n \in {\mathbb {R}}\)
-
(ii)
\(D_t^{\alpha }(c)=0\) for any constant c.
-
(iii)
\(D_t^{\alpha }aq(t)=aD_t^{\alpha }q(t)\) with real constant a.
-
(iv)
\(D_t^{\alpha }(aq(t)+br(t))=aD_t^{\alpha }q(t)\)+\(bD_t^{\alpha }r(t)\) with real constants a, b.
-
(v)
\(D_t^{\alpha }(r(t)q(t))=r(t)D_t^{\alpha }q(t)\)+\(q(t)D_t^{\alpha }r(t)\).
-
(vi)
\(D_t^{\alpha }(\frac{q(t)}{r(t)})=\frac{r(t)D_t^{\alpha }q(t)-q(t)D_t^{\alpha }r(t)}{r^2(t)}, r(t) \ne 0\).
-
(vii)
\(D_t^{\alpha }(q(t))=t^{1-\alpha }\frac{dq}{dt}\) when q(t) is differentiable.
Suggested model
The BBM equation was first observed in 1972 as a development of the KdV equation for shallow waves of water in a homogeneous system. The BBM equation is frequently used as a variant of the KdV equation for describing shallow water waves. It is applicable not only to surface waves in water but also to drift waves and Rossby waves in plasma within spinning environments. The BBM nonlinear model52 is given in the following manner:
and the KdV equation is given by
Both the BBM and KdV equations serve as foundational tools for comprehending various wave phenomena. They serve as essential tools for analyzing surface waves in water bodies, hydromagnetic waves in plasma, acoustical and gravitational waves in compressible fluids, acoustical waves in harmonic crystals, and long waves in nonlinear dispersive processes, among other applications. A new equation called the Wazwaz–Benjamin–Bona–Mahony (WBBM) equation53 was derived by Wazwaz in 2017 from a 3-dimensional modified BMM equation, which is expressed as
Wazwaz reformulated these newly introduced equations. This article will focus on the first fractional 3D WBBM equation, as presented in54, which is given in the following manner:
where q(t, x, y, z) is a wave function with 4 free components t, x, y, and z. \(D_t^{\alpha }, D_x^{\alpha }, D_y^{\alpha }\), and \(D_z^{\alpha }\) correspond to the fractional derivatives of order \(\alpha\) w.r. to t, x, y, and z, sequentially whilst \(0<\alpha \le 1, t \ge 0\).
Ordinary differential form of the suggested model
Consider the next traveling wave relation for Eq. (7)
with real constants \(a_1, a_2, a_3\), and \(a_4\). Applying Eq. (8) in Eq. (7) gives the next outcome as
Integrating Eq. (9) w. r. to \(\theta\), one obtains
with integration constant \(a_5\). For simplicity \(a_5\), by setting \(a_5\) to 0, one reaches the next ordinary differential form as

Visualization of phase diagrams of the dynamical system Eq. (12).
Bifurcation analysis
This segment introduces the bifurcation and phase portraits of the next planner dynamical system. Nonlinear partial differential models can be analyzed qualitatively using this dynamic system method. The orbits of this system can manifest as points, simple closed curves, or other isomorphic curves. These varied orbits correspond to the solutions of Eq. (7) with distinct physical characteristics. Consider \(\frac{dQ}{d\theta }=P\), then the planner dynamical form of Eq. (7) with Hamiltonian function can be written as
where \(l=\frac{a_2}{a_1a_3a_4}, m=\frac{a_1-a_4}{a_1a_3a_4}\), and h is the Hamiltonian constant.
Let \(Q(\theta )\) be a solution to Equation Eq. (12) with the conditions \(\lim _{\theta \rightarrow -\infty }Q(\theta )=u_1\) and \(\lim _{\theta \rightarrow +\infty } Q(\theta )=u_2\), where \(u_{1}\) and \(u_{2}\) are constants. In the case where \(u_1=u_2\), \(Q(\theta )\) signifies a homoclinic orbit, leading to \(Q(\theta )\) emerging a solitary wave solution of Eq. (11). Conversely, if \(u_{1}\ne u_{2}\), then \(Q(\theta )\) corresponds to a heteroclinic orbit. Specifically, for \(u_1>u_2\), \(Q(\theta )\) takes the form of a kink wave solution, while for \(u_1<u_2\), it becomes an anti-kink wave solution. Another scenario arises when Eq. (12) exhibits a closed phase portrait, resulting in Eq. (11) having a periodic solution. It is noted that a phase portrait represents a collection of orbits in a phase plane.
For finding the equilibrium points of system Eq. (12), we solve the system of equations \(P=0, -lQ^3-mQ=0\). Then only one equilibrium point (0, 0) is found for \(lm>O\). On the other hand, three equilibrium points \((0,0), \left( \sqrt{-\frac{m}{l}},0\right)\), and \(\left( -\sqrt{-\frac{m}{l}},0\right)\) are obtained for \(lm<O\).
System Eq. (12) has a Jacobian matrix with the following determinant form
Therefore, Eq. (12) has the characteristic value \(\sqrt{-3lQ^2-m}\) at position (Q, 0). Consequently, the equilibrium point (Q, 0) accounts for a center point when D(Q, P) is positive, a saddle point when D(Q, P) is negative, and a cuspidal point when \(D(Q, P)=0\). Various parameters can lead to the following possible outcomes:
Case 1: \(l<0, m>0\)
By selecting a parameter set such that \(a_1=2,a_3=a_4=1, a_2=-1\), three equilibrium points (0, 0), (1, 0) and \((-1,0)\), are identified, as presented in Fig. 1a. Clearly, (0, 0) represents a center point, whilst (1, 0) and \((-1,0)\) correspond to saddle points. Fig. 1a demonstrates the existence of anti-kink and kink wave outcomes through the connection of two heteroclinic orbits \((-1,0)\) and (1, 0).
Case 2: \(l>0, m<0\)
By selecting a parameter set such that \(a_1=a_2=a_3=1,a_4=2\), there exist three equilibrium points (0, 0), (1, 0), and (− 1,0) are identified, as presented in Fig. 1b. Evidently, (0, 0) represents a saddle point, whilst (1, 0) and \((-1,0)\) correspond to center points. The trajectories comprise closed curves, encompassing diverse solutions such as hyperperiodic (yellow curve), periodic (red curve), and homoclinic orbits (blue curve).
Case 3: \(l>0, m>0\)
By selecting a parameter set such that \(a_2=-1,a_1=a_3=1,a_4=2\), one equilibrium point (0, 0), is identified, as presented in Fig. 1c. In this scenario, (0, 0) represents a center point. Figure Fig. 1c contains only one family of periodic orbits that can be obtained from the system Eq. (12).
Case 4: \(l<0, m<0\)
By selecting a parameter set such that \(a_1=2,a_3=a_4=1, a_2=-1\), there is only one equilibrium point (0, 0), is identified, as presented in Fig. 1d. In this scenario, (0, 0) represents a saddle point. We see that there is no closed trajectory for the system Eq. (12).

Periodic behavior of the structure Eq. (15) for \(a_1=a_2=1,a_3=\frac{1}{4},\) \(a_4=2,\) and \(\sigma =0\).
Chaotic behaviors
This section examines the chaotic features of the resulting dynamical system by considering perturbed terms. This analysis is conducted through the examination of 2D and 3D phase portraits. To initiate this investigation, let us consider the dynamical system:
where \(\sigma \cos (\omega \theta)\) represents the perturbed term, \(\sigma\) corresponds to the amplitude, and \(\omega\) is the frequency of the system. In this section, we explore how the perturbation’s intensity and frequency impact the system Eq. (15). Keeping the main parameters fixed (\(a_1=a_2=1,a_3=\frac{1}{4},a_4=2\)), we obtain quasiperiodic and chaotic behaviors for diverse strengths and frequencies in Figs. 2, 3, and 4. Figure 2 signifies the state of Eq. (15) when \(\sigma =0\). We display the trajectory’s status depending on the perturbation strength and frequency. Figure 2 displays the periodic nature of the system Eq. (15) in time series, 2D-, and 3D phase projections. The results of Fig. 3 show that the dynamic system changes from a period to a quasi-period with a small variation in strength and frequency (\(\sigma\) increases to 0.3 and \(\omega =0.2\)). In Fig. 4, with increased frequency and strength (\(\sigma\) increases to 2.9 and \(\omega =3.9\)), the system undergoes violent disturbances, transitioning into a chaotic state.

Quasi-periodic behavior of the structure Eq. (15) for \(a_1=a_2=1,a_3=\frac{1}{4},\) \(a_4=2,\) \(\sigma =0.3,\) and \(\omega =0.2\).

Chaotic behavior of the structure Eq. (15) for \(a_1=a_2=1,a_3=\frac{1}{4},a_4=2,\) \(\sigma =2.9,\) and \(\omega =3.9\).

Sensitivity of equation Eq. (15) for initial values (1, 0.1) (red curve) and (1, 0.2) (blue curve) for \(a_1=a_2=1,a_3=\frac{1}{4},\) and \(a_4=2\).
Sensitivity analysis
This portion investigates the impact of initial values on the perturbed system Eq. (15) across a range of strengths and frequencies, maintaining constant parameter values (\(a_1=a_2=1,a_3=\frac{1}{4},a_4=2\)). The results, depicted in Fig. 5, showcase a red curve representing a time series plot with initial values \((Q(0), P(0))=(1,0.1)\) and a blue curve with \((Q(0), P(0))=(1,0.2)\). In Fig. 5a, it is evident that the periodic nature of the outcome is determined by the initial value of the perturbed system (\(\sigma =0\)). Figure 5b illustrates that with a small perturbation strength (\(\sigma =0.3\)), the two-time series diagrams exhibit only small changes, indicating low sensitivity to the initial condition. Conversely, when the perturbation strength increases (\(\sigma =2.9\)), Fig. 5c reveals major changes between time series diagrams, signifying heightened sensitivity to changes in the initial value.
Bright and dark solitons of the WBBM model
This section examines dark and bright solitons obtained from the mentioned model employing the planner dynamical system technique.
Case 1: \(l<0,\) and \(m>0\)
For \(h\in (0, -\frac{m^2}{4l})\), one can obtain a class of periodic orbits of the dynamical structure Eq. (12). In this scenario, the Hamiltonian system will be written in the next formation
where \(\phi _1=\sqrt{-\frac{m}{l}+\frac{\sqrt{m^2+4lh}}{l}}\) and \(\phi _2=\sqrt{-\frac{m}{l}-\frac{\sqrt{m^2+4lh}}{l}}\).
By employing Eq. (16) into the first equation of the Hamiltonian structure Eq. (12), and integrating we arrive
with integral constant \(\theta _0\).
Therefore, we obtain the next two periodic wave outcomes as
For \(h=-\frac{m^2}{4l}\), we have \(\phi _1^2=\phi _2^2=-\frac{m}{l}\), and the next kink wave (for positive sign) and antikink wave (for negative sign) solutions are obtained
Case 2: \(l>0,\) and \(m<0\)
For \(h\in (-\frac{m^2}{4l}, 0)\), one can acquire two classes of periodic orbits of the dynamical structure Eq. (12). In this case, the Hamiltonian system will be written in the subsequent formation
where \(\phi _1=\sqrt{-\frac{m}{l}+\frac{\sqrt{m^2+4lh}}{l}}\) and \(\phi _2=\sqrt{-\frac{m}{l}-\frac{\sqrt{m^2+4lh}}{l}}\).
By employing Eq. (18) into the first equation of the Hamiltonian structure Eq. (12), and integrating we arrive
and
then we acquired the next two periodic wave outcomes as
For \(h=0\), we have \(\phi _2=0\) and \(\phi _1=\sqrt{-\frac{2m}{l}}\), and the next two bright (for positive sign) and dark (for negative sign) bell solitary wave outcomes are obtained
For \(h\in (0, +\infty )\), the Hamiltonian system will be written in the following way
where \(\phi _1=\sqrt{-\frac{m}{l}+\frac{\sqrt{m^2+4lh}}{l}}\) and \(\phi _3=\sqrt{\frac{m}{l}+\frac{\sqrt{m^2+4lh}}{l}}\).
By employing Eq. (21) into the first equation of the Hamiltonian structure Eq. (12), and integrating we arrive
then we acquired the next periodic wave outcomes as

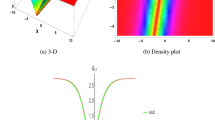
Outlook of outcome \(q_4\): (a,b) bright soliton, (c,d) dark soliton.

Outlook of outcome \(q_2\): (a,b) kink wave, (c,d) anti-kink wave.

Outlook of periodic wave outcome \(q_1\).
Discussion of results
Using appropriate parameter values, we describe numerical simulations of the obtained outcomes and give their physical interpretation. For solution \(q_4\), the positive sign is displayed with a bright soliton, while the negative sign is displayed with a dark soliton. It is shown in Fig. 6 how the physical nature of the precise outcome \(q_4\) will change when \(\theta _0=1, \alpha =0.5, a_1=a_2=1,a_3=\frac{1}{2},\) and \(a_4=2\). It is observed that for the positive sign, Fig. 6a,b is signified by a bright soliton, while for the negative sign, Fig. 6c,d is signified by a dark soliton. To examine the physical properties of the precise outcome, \(q_2\), a numerical simulation is presented in Fig. 7 for the parameters \(\theta _0=1, \alpha =0.8, a_1=2,a_2=-1,a_3=a_4=1,\) and \(h=\frac{1}{8}\). One can observe from the figure that for the positive sign, Fig. 7a,b is signified by a kink wave, while for the negative sign, Fig. 7c,d is signified by an anti-kink wave. Solutions \(q_1, q_3\), and \(q_5\) exhibit a periodic wave. Finally, to examine the physical properties of the precise outcome, \(q_1\), a numerical simulation is presented in Fig. 8 for the parameters \(\theta _0=1, \alpha =0.5, a_1=2,a_2=-1,a_3=a_4=1,\) and \(h=\frac{1}{10}\).

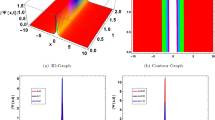
Outlook of the stability graphic for the perturbation Eq. (28), with \(d=e=1\).
Stability analysis
To analyze the stability of the WBBM equation, this research will conduct linear stability analysis, as described in38. Assume WBBM’s integer order, as stated in Eq. (4). Now, the perturbation solution takes the following structure:
with incident power r. Inserting equation Eq. (23) into Eq. (4), one reaches
By linearizing the immediate equation in the form \(\lambda\) reads,
Now, we suppose that the next solution to the above equation
with normalized wave number c, d, e and frequency \(\omega\). Plugging Eq. (26) into Eq. (25) reads
By solving the above equation one can reach the value of \(\omega\)
The examination delves into the analysis of propagation relationships Eq. (28) as described in Fig. 9. Figure shows that the positive sign of \(\omega (c, d, e)\) indicates whether the solution will amplify or diminish over time. The incident power r and wave numbers c, d, and e are stable states for small perturbations (red and green curves). The system remains marginally stable when \(\omega (c, d, e) = 0\), as disturbances do not grow or decay over time (yellow curve). Additionally, if \(\omega (c, d, e)\) is negative, the system moves further away from equilibrium over time, leading to instability in steady-state solutions and exponential distortion growth (blue and purple curves).
Novelty of the outcomes
This paragraph compares our results with recent studies, illustrating our findings’ novelty. A literature review cited in56,57,58,59 is included to determine the originality of our results. Mamun and his collaborators presented solitary and periodic wave solutions of the suggested model taking advantage of the \((G'/G^2)\)-expansion process56. Akram and his coauthors obtained some traveling wave solutions to this model employing the EMAEM method57. Inc and his colleagues solved this model through the Sarder-subequation scheme58. Kaabar and others investigated the suggested model utilizing the generalized Kudryashov process and \(\exp (-\phi (\zeta ))\) technique59. Our results \(q_1, q_2, q_3, q_4\), and \(q_5\) exhibit novelty, when compared to their corresponding solutions. Notably, stability, bifurcation, chaos, and sensitivity analysis of the governing model have not been reported in the literature. Consequently, our comparison highlights the novelty of additional solutions, representing the first instances of their construction for the investigated model.
Conclusion
We have effectively investigated bifurcation analysis and new waveforms to the first fractional 3D WBBM equation that appeared in shallow water waves. Moreover, the linear stability process is performed to assess the model’s stability. By implementing the Galilean transformation, we have successfully obtained the dynamical system of the mentioned model, facilitating a comprehensive bifurcation analysis. Additionally, we explored various solitary wave solutions, including dark solitons, bright solitons, kink waves, periodic waves, and anti-kink waves. Through simulations, we visually presented these solutions, emphasizing their distinct characteristics and existence. The results highlight the effectiveness, brevity, and efficiency of the employed integration methods. They also suggest their applicability to delving into more intricate nonlinear models emerging in modern science and engineering scenarios.
Data availibility
All data generated or analysed during this study are included in this article.
References
Akbar, A. et al. Intelligent computing paradigm for the Buongiorno model of nanofluid flow with partial slip and MHD effects over a rotating disk. ZAMM 103(1), e202200141 (2023).
Raja, M. A. Z. et al. A predictive neuro-computing approach for micro-polar nanofluid flow along rotating disk in the presence of magnetic field and partial slip. AIMS Math. 8(5), 12062–12092 (2023).
Jamal, T., Jhangeer, A. & Hussain, M. Z. An anatomization of pulse solitons of nerve impulse model via phase portraits, chaos and sensitivity analysis. Chin. J. Phys. 87, 496–509 (2024).
Jawad, M., Shah, Z., Khan, A., Islam, S. & Ullah, H. Three-dimensional MHD nanofluid thin film flow with heat and mass transfer over an inclined porous rotating disk. Adv. Mech. Eng. 11(8), 1–11 (2019).
Khan, R. A. et al. Heat transfer between two porous parallel plates of steady nano fludis with Brownian and thermophoretic effects: A new stochastic numerical approach. Int. Commun. Heat Mass. Transf. 126, 105436 (2021).
Samina, S., Jhangeer, A. & Chen, Z. Nonlinear dynamics of porous fin temperature profile: The extended simplest equation approach. Chaos Solitons Fractals 177, 114236 (2023).
Rafiq, M. H., Raza, N. & Jhangeer, A. Dynamic study of bifurcation, chaotic behavior and multi-soliton profiles for the system of shallow water wave equations with their stability. Chaos Solitons Fractals 171, 113436 (2023).
Ullah, H. et al. Neuro-computing for hall current and MHD effects on the flow of micro-polar nano-fluid between two parallel rotating plates. Arab. J. Sci. Eng. 47, 16371–16391 (2022).
Fiza, M., Ullah, H. & Islam, S. Three dimensional MHD rotating flow of viscoelastic nanofluid in porous medium between parallel plates. J. Por. Med. 23(7), 715–729 (2020).
Khan, I. et al. Fractional analysis of MHD boundary layer flow over a stretching sheet in porous medium: A new stochastic method. J. Funct. Spaces 2021, 5844741 (2021).
Nandi, D. C., Ullah, M. S., Roshid, H. O. & Ali, M. Z. Application of the unified method to solve the ion sound and Langmuir waves model. Heliyon 8(10), e10924 (2022).
Ganie, A. H. et al. Application of three analytical approaches to the model of ion sound and Langmuir waves. Pramana J. Phys. 98, 46 (2024).
Ullah, M. S., Roshid, H. O., Alshammari, F. S. & Ali, M. Z. Collision phenomena among the solitons, periodic and Jacobi elliptic functions to a (3 + 1)-dimensional Sharma–Tasso–Olver-like model. Results Phys. 36, 105412 (2022).
Seadawy, A. R. et al. Analytical mathematical approaches for the double-chain model of DNA by a novel computational technique. Chaos Solitons Fractals 144, 110669 (2021).
Baskonus, H. M., Guirao, J. L. G., Kumar, A., Causanilles, F. S. V. & Bermudez, G. R. Regarding new traveling wave solutions for the mathematical model arising in telecommunications. Adv. Math. Phys. 2021, 5554280 (2021).
Ullah, M. S., Mostafa, M., Ali, M. Z., Roshid, H. O. & Akter, M. Soliton solutions for the Zoomeron model applying three analytical techniques. PLoS ONE 18(7), e0283594 (2023).
Rafiq, M. H., Raza, N., Jhangeer, A. & Zidan, A. M. Qualitative analysis, exact solutions and symmetry reduction for a generalized (2 + 1)-dimensional KP–MEW-Burgers equation. Chaos Solitons Fractals 181, 114647 (2024).
Bishop, A. R. Solitons in condensed matter physics. Phys. Scr. 20(3–4), 409 (1979).
Beenish, Kurkcu, H., Riaz, M. B., Imran, M. & Jhangeer, A. Lie analysis and nonlinear propagating waves of the (3 + 1)-dimensional generalized Boiti–Leon–Manna–Pempinelli equation. Alex. Eng. J. 80, 475–486 (2023).
Ullah, H., Islam, S. & Fiza, M. Analytical solution for three-dimensional problem of condensation film on inclined rotating disk by extended optimal Homotopy asymptotic method. Iran. J. Sci. Technol. Trans. Mech. Eng. 40, 265–273 (2016).
Ullah, H. et al. Levenberg–Marquardt Backpropagation for numerical treatment of micropolar flow in a porous channel with mass injection. Complexity 2021, 5337589 (2021).
Rehman, S. U., Bilal, M. & Ahmad, J. The study of solitary wave solutions to the time conformable Schrödinger system by a powerful computational technique. Opt. Quantum Electron. 54, 228 (2022).
Seadawy, A. R., Arshad, M. & Lu, D. The weakly nonlinear wave propagation theory for the Kelvin–Helmholtz instability in magnetohydrodynamics flows. Chaos Solitons Fractals 139, 110141 (2020).
Bilal, B., Rehman, S. U. & Ahmad, J. Stability analysis and diverse nonlinear optical pluses of dynamical model in birefringent fibers without four-wave mixing. Opt. Quantum Electron. 54, 277 (2022).
Ma, W. X. & Lee, J. H. A transformed rational function method and exact solutions to the (3 + 1)-dimensional Jimbo–Miwa equation. Chaos Solitons Fractals 42, 1356–1363 (2009).
Gasmi, B., Ciancio, A., Moussa, A., Alhakim, L. & Mati, Y. New analytical solutions and modulation instability analysis for the nonlinear (1 + 1)-dimensional Phi-four model. Int. J. Math. Comput. Eng. 1(1), 1–13 (2023).
Mahmud, A. A., Tanriverdi, T. & Muhamad, K. A. Exact traveling wave solutions for (2 + 1)-dimensional Konopelchenko–Dubrovsky equation by using the hyperbolic trigonometric functions methods. Int. J. Math. Comput. Eng. 1(1), 1–14 (2023).
Rehman, S. U., Bilal, M. & Ahmad, J. New exact solitary wave solutions for the 3D-FWBBM model in arising shallow water waves by two analytical methods. Results Phys. 25, 104230 (2021).
Ullah, M. S., Seadawy, A. R., Ali, M. Z. & Roshid, H. O. Optical soliton solutions to the Fokas–Lenells model applying the \(\varphi ^6\)-model expansion approach. Opt. Quantum Electron. 55, 495 (2023).
Bilal, M., Younas, U., Yusuf, A., Sulaiman, T. A. & Bayram, M. Optical solitons with the birefringent fibers without four-wave mixing via the Lakshmanan–Porsezian–Daniel equation. Optik 243, 167489 (2021).
Bilal, B., Rehman, S. U. & Ahmad, J. Investigation of optical solitons and modulation instability analysis to the Kundu–Mukherjee–Naskar model. Opt. Quantum Electron. 53, 283 (2021).
Bilal, B., Rehman, S. U. & Ahmad, J. Dynamical nonlinear wave structures of the predator–prey model using conformable derivative and its stability analysis. Pramana J. Phys. 96, 149 (2022).
Ma, W. X. A novel kind of reduced integrable matrix mKdV equations and their binary Darboux transformations. Mod. Phys. Lett. B 36(20), 2250094 (2022).
Ullah, M. S., Roshid, H. O., Ali, M. Z. & Rezazadeh, H. Kink and breather waves with and without singular solutions to the Zoomeron model. Results Phys. 49, 106535 (2023).
Ma, W. X. Sasa–Satsuma type matrix integrable hierarchies and their Riemann–Hilbert problems and soliton solutions. Physica D 446, 133672 (2023).
Ryabov, P. N., Sinelshchikov, D. I. & Kochanov, M. B. Application of the Kudryashov method for finding exact solutions of the high-order nonlinear evolution equations. Appl. Math. Comput. 218, 3965–3972 (2011).
Ullah, M. S., Abdeljabbar, A., Roshid, H. O. & Ali, M. Z. Application of the unified method to solve the Biswas–Arshed model. Results Phys. 42, 105946 (2022).
Ullah, M. S., Roshid, H. O. & Ali, M. Z. New wave behaviors and stability analysis for the (2 + 1)-dimensional Zoomeron model. Opt. Quantum Electron. 56, 240 (2024).
Demiray, S., Ünsal, Ö. & Bekir, A. New exact solutions for Boussinesq type equations by using \((G^{\prime }/G,1/G)\) and \((1/G^{\prime })\)-expansion methods. Acta Phys. Pol. A 125, 5 (2014).
Ullah, M. S. Interaction solution to the (3 + 1)-D negative-order KdV first structure. Partial Differ. Equ. Appl. Math. 8, 100566 (2023).
Bilal, M., Rehman, S. U. & Ahmad, J. Dispersive solitary wave solutions for the dynamical soliton model by three versatile analytical mathematical methods. Eur. Phys. J. Plus 137, 674 (2022).
Rehman, S. U., Bilal, B. & Ahmad, J. Highly dispersive optical and other soliton solutions to fiber Bragg gratings with the application of different mechanisms. Mod. Phys. Lett. B 36(28), 2250193 (2022).
Bilal, B., Rehman, S. U. & Ahmad, J. Analysis in fiber Bragg gratings with Kerr law nonlinearity for diverse optical soliton solutions by reliable analytical techniques. Mod. Phys. Lett. B 36(23), 2250122 (2022).
Ali, K. K., Dutta, H., Yilmazer, R. & Noeiaghdam, S. On the new wave behaviors of the Gilson–Pickering equation. Front. Phys. 8, 54 (2020).
Ullah, M. S., Ali, M. Z., Roshid, H. O., Seadawy, A. R. & Baleanu, D. Collision phenomena among lump, periodic and soliton solutions to a (2 + 1)-dimensional Bogoyavlenskii’s breaking soliton model. Phys. Lett. A. 397, 127263 (2021).
Madhukalya, B., Das, R., Hosseini, K., Baleanu, D. & Hincal, E. Effect of ion and negative ion temperatures on KdV and mKdV solitons in a multicomponent plasma. Nonlinear Dyn. 111, 8659–8671 (2023).
Talafha, A. M., Jhangeer, A. & Kazmi, S. S. Dynamical analysis of (4 + 1)-dimensional Davey Srewartson Kadomtsev Petviashvili equation by employing Lie symmetry approach. Ain Shams Eng. J. 14(11), 102537 (2023).
Luo, R., Rafiullah, Emadifar, H. & Rahman, M. U. Bifurcations, chaotic dynamics, sensitivity analysis and some novel optical solitons of the perturbed nonlinear Schrödinger equation with Kerr law nonlinearity. Results Phys. 54, 107133 (2023).
Hosseini, K., Hincal, E. & Ilie, M. Bifurcation analysis, chaotic behaviors, sensitivity analysis, and soliton solutions of a generalized Schrödinger equation. Nonlinear Dyn. 111, 17455–17462 (2023).
Liu, Z. R. & Li, J. B. Bifurcation of solitary waves and domain wall waves for KdV-like equation with higher order nonlinearity. Int. J. Bifurc. Chaos. 12, 397–407 (2002).
Yang, L., Rahman, M. U. & Khan, M. A. Complex dynamics, sensitivity analysis and soliton solutions in the (2 + 1)-dimensional nonlinear Zoomeron model. Results Phys. 56, 107261 (2024).
Benjamin, T. B., Bona, J. L. & Mahony, J. J. Model equations for long waves in nonlinear dispersive systems. Philos. Trans. R. Soc. Lond. 272(1220), 47–78 (1972).
Wazwaz, A. M. Exact soliton and kink solutions for new (3 + 1)-dimensional nonlinear modified equations of wave propagation. Open Eng. 7, 169–174 (2017).
Seadawy, A. R., Ali, K. K. & Nuruddeen, R. I. A variety of soliton solutions for the fractional Wazwaz–Benjamin–Bona–Mahony equations. Results Phys. 12, 2234–2241 (2019).
Baleanu, D., Wu, G. C. & Zeng, S. D. Chaos analysis and asymptotic stability of generalized Caputo fractional differential equations. Chaos Solitons Fractals 102, 99–105 (2017).
Mamun, A. A., Shahen, N. H. M., Ananna, S. N., Asaduzzaman, M. & Foyjonnesa,. Solitary and periodic wave solutions to the family of new 3D fractional WBBM equations in mathematical physics. Heliyon 7, e07483 (2021).
Akram, U. et al. Traveling wave solutions for the fractional Wazwaz–Benjamin–Bona–Mahony model in arising shallow water waves. Results Phys. 20, 103725 (2021).
Inc, M., Rezazadeh, H. & Baleanu, D. New solitary wave solutions for variants of (3 + 1)-dimensional Wazwaz–Benjamin–Bona–Mahony equations. Front Phys. 8, 332 (2020).
Kaabar, M. K. A., Kaplan, M. & Siri, Z. New exact soliton solutions of the (3 + 1)-dimensional conformable Wazwaz–Benjamin–Bona–Mahony equation via two novel techniques. J. Funct. Spaces 2021, 4659905 (2021).
Author information
Authors and Affiliations
Contributions
M.S.U.: Writing—original draft, methodology, software; M.Z.A.: Supervision, Validation; H.-O.R.: Conceptualization, Data curation, Supervision.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ullah, M.S., Ali, M.Z. & Roshid, HO. Bifurcation analysis and new waveforms to the first fractional WBBM equation. Sci Rep 14, 11907 (2024). https://doi.org/10.1038/s41598-024-62754-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-62754-0
Keywords
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
