
Abstract
The first step in any dietary monitoring system is the automatic detection of eating episodes. To detect eating episodes, either sensor data or images can be used, and either method can result in false-positive detection. This study aims to reduce the number of false positives in the detection of eating episodes by a wearable sensor, Automatic Ingestion Monitor v2 (AIM-2). Thirty participants wore the AIM-2 for two days each (pseudo-free-living and free-living). The eating episodes were detected by three methods: (1) recognition of solid foods and beverages in images captured by AIM-2; (2) recognition of chewing from the AIM-2 accelerometer sensor; and (3) hierarchical classification to combine confidence scores from image and accelerometer classifiers. The integration of image- and sensor-based methods achieved 94.59% sensitivity, 70.47% precision, and 80.77% F1-score in the free-living environment, which is significantly better than either of the original methods (8% higher sensitivity). The proposed method successfully reduces the number of false positives in the detection of eating episodes.
Similar content being viewed by others


Introduction
Dietary monitoring is critical for understanding body weight dynamics in humans associated with underweight, overweight, and obesity1. Underweight people are more likely to have malnutrition, heart irregularities, bone fractures, and even death2. Being overweight increases health risks, for example, type-2 diabetes, cardiovascular diseases, and asthma caused 3.4 million deaths in 20163. Eating behaviors associated with being underweight, or overweight, can be understood by monitoring dietary patterns. Traditional methods for monitoring food intake are food records, 24 h recalls, and food frequency questionnaires4. These methods are usually inaccurate and suffer from misreporting5 as well as placing an extra burden on the user.
Numerous technology-driven dietary monitoring methods have been suggested. These include manual image capture and various types of wearable sensors. Image-based methods are classified into two types. (1) Active image capture, where the user captures images (e.g. on a smartphone), and (2) Passive image capture, where images are automatically captured without user participation (e.g., by a wearable camera). The advantage of using images is that they capture the foods being eaten. In studies of6,7,8, and9, a smartphone-based active image-capturing method was proposed for dietary assessment. Active user involvement is required for smartphone-based approaches, thus placing the burden on the user and increasing the risk of missing images. In10,11, and12, wearable cameras were used for the dietary assessment was proposed. Other than putting on the device, the passive image capture does not require any human intervention. However, a wearable camera creates privacy concerns as the user is not in control of the image capture13. In the study of9, food, and drink images were recognized using a deep neural network, the authors called their network ‘NutriNet’, which is a modified version of the popular AlexNet network14. This method classified food and drink images from non-food images, however, did not detect eating episodes. Similarly, in15, a convolution neural network (CNN) was introduced to recognize food images. To identify food items, image segmentation, and object classification methods were proposed in16. The authors also integrated contextual information (user’s diet) to correct potential misclassification. Another deep learning-based method was proposed in12, the authors used a wearable camera to capture egocentric images and then classified food and non-food images in real-life scenarios. The food intake detection accuracy (86.4%) was satisfactory. However, this method results in a high number of false positives (13%). In free-living conditions, image-based dietary assessment suffers from false positive detection due to a wearable camera capturing food images that were not consumed by the user.
Sensor-based methods have their advantages and limitations. Various wearable sensors have been proposed to detect eating proxies such as chewing, swallowing, jaw movements, and hand-to-mouth gestures. Acoustic sensors (e.g., microphone) have been used to detect chewing and swallowing sounds17,18,19,20,21,22,23 and thus detect eating episodes. Another commonly used sensor is the strain sensor that can capture jaw movement21,24, throat movement25,26,27, temporal muscle movement28,29, and hence detect food intake. Although the food (solid) intake detection accuracy is impressive, strain sensors need direct contact with the skin, which is inconvenient for users. Physiological sensors such as Electromyography (EMG)30,31, Respiratory Inductance Plethysmography (RIP)/breathing sensor32,33, and glucose monitoring sensor34,35,36 were used to detect eating episodes. The sensors have their advantages and limitations. Motion sensors such as an accelerometer, and gyroscope have also been proposed to detect food intake by hand-to-mouth gesture37,38,39,40, and head movement29,41,42. The main advantage of using motion sensors is that it is convenient to use (no direct contact is necessary), however, they also generate false detection (in the range of 9–30%).
Studies28,29 conducted by our research team revolve around the application of chewing sensors, including piezoelectric and flex sensors, to facilitate the detection of food intake. Notably, the identification of eating episodes can be derived from either sensor data or images, given the presence of both chewing and image sensors within the wearable device. Either method may produce false-positive detection. For example, gum chewing may register as an eating episode on chewing sensor data. Foods not being eaten may be recognized in the images from the egocentric camera. Therefore, integrating both sensor-based and image-based food detection methods is essential for attaining more precise and accurate insights into food intake. A separate research43 inquiry applied Score-Level and Decision-Level Fusion of Inertial and Video Data for the detection of intake gestures. In this scenario, the inertial sensor is incorporated into wearable devices, while the video camera remains fixed in place. However, implementing such a setup in real-life scenarios, especially free-living situations, presents challenges. In this paper, we bridge this gap and propose a novel food intake detection method that integrates sensor- and image-based detection from wearable sensors.
We use methods from deep learning to recognize solid foods and beverages in images captured by AIM-2. We use sensor-based detection of eating and hierarchical classification to combine confidence scores from both image and sensor methods for accurate eating detection. The paper is organized as follows, first, the Material and Methods are presented in Section “Material and methods” followed by results are discussed in section “Results”. Sections “Discussion” and “Conclusion” are discussion, and conclusion, respectively.
Material and methods
Sensor system
The Automatic Ingestion Monitor v2, AIM-229 was used in this study. The sensor system was attached to the frame of a pair of glasses. Figure 1 depicts an AIM-2. We used images, captured by the AIM-2 camera and sensor data, collected by the 3D accelerometer (chewing sensor) in this paper. The camera continuously captured images at a rate of one image every 15 s from the user’s egocentric point of view. These images were used to develop image-based food and beverage object detection. The 3D accelerometer sensor recorded head movement as well as head angle and body leaning forward motion, which was used as eating proxies to detect eating episodes. The accelerometer data were sampled at 128 Hz. Data from accelerometer sensors and images were saved to an SD card and processed offline for algorithm development and validation.

AIM-2 installed on eyeglasses with non-corrective lens.
Data collection and ground truth annotation
A study was carried out in order to develop classification methods and assess the accuracy of food intake detection. From August 2018 to February 2019, 30 participants (20 males and 10 females, mean SD age of \(23.5 \pm 4.9\) years, range \(18 - 39\) years, and mean body mass index (BMI) \(23.08 \pm 3.11 \;\;{\text{kg/m}}^{{2}}\)) were recruited. The University of Alabama’s Institutional Review Board (IRB) approved the study. The experiment included a pseudo-free-living day and a free-living day. During the pseudo-free-living day, participants consumed three meals in the lab while engaging in otherwise unrestricted daily activities. There were no restrictions on food intake or activities during the free-living day. A detailed description of the study protocol and how the sample size was determined were reported in29. All methods were carried out in accordance with the approved IRB’s guidelines and regulations. All subjects have given their informed consent to the use of the recorded data (sensor and image) for presentations, publications, or other forms of dissemination.
During food consumption in the lab, participants used a foot pedal connected to a USB data logger to record food ingestion. They were instructed to press the pedal as soon as they placed the food in their mouth (a bite) and held it until the food was swallowed. Similarly, for liquid food, they were requested to press and hold the pedal from the moment the liquid was placed in their mouth until the last swallow. This foot pedal record was used as ground truth for the pseudo-free-living day to train a food intake detection model for chewing sensor data. The participants continued free living for 24 h after completing the first day (pseudo-free living). The device captured continuous images (one image every 15 s), which were then manually reviewed to extract the ground truth of food intake detection of a free-living day. The number of eating episodes, as well as the start and end times of eating, were annotated and used for validation during the free-living day. During pseudo-free-living days, 372 h of data were collected, capturing 90 meals and a total of 89,257 images (consisting of 3996 food images and 16.65 h of eating). Conversely, in free-living days, 380 h of data were collected, capturing 111 meals and a total of 91,313 images (consisting of 4933 food images and 20.55 h of eating)29,44,45. This study exclusively utilizes free-living data due to concerns about potential biases introduced in image-based detection when participants consume their food in a laboratory environment during pseudo-free-living days.
Images from free-living days were annotated by hand with the rectangle bounding box in order to train a classifier to detect food and beverage objects. Initially, all the images were divided into two groups:
(1) Positive samples (contained food/beverage objects) and (2) negative samples (did not contain food/beverage objects). The negative sample images were not annotated and were used directly in the training dataset. Positive images of 30 participants, on the other hand, were annotated, and all food and beverage objects were labeled using MATLAB 2019 Image Labeler application46. The annotator did not label food and beverage objects when the scene was food preparation and shopping. Furthermore, annotating during social eating was difficult because food and beverage objects could belong to a different person. As a result, the annotator did not label the food and beverage objects that were far from the subject, assuming that the subject did not consume them. We found a total of 190 food and beverage items.
We used two methods for reporting performance when training, validating, and testing the proposed method: leave one subject out validation and holdout validation. Classifiers were trained and tested using the leave-one-subject-out (LOSO) cross-validation technique to assess performance. This means that data from one participant were kept for testing while data from the other participants were used to train the classifier. It ensured that the classifier never saw the testing data for a specific subject. The procedure was repeated 30 times, so each participant was only tested once. Furthermore, in order to compare the performance of different methods, the dataset was randomly divided into training (80%), validation (10%), and testing (10%) sets for holdout validation which may result same subject data on the training and testing set.
Image-based food and beverage object detection
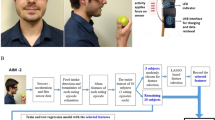
The proposed method is divided into three parts, (1) image-based detection, (2) sensor-based detection, and (3) Integration of image- and sensor-based prediction. The flow chart of the proposed method is presented in Fig. 2. Recently, CNN-based deep learning methods have shown very good performance in visual recognition. We used Faster R-CNN47 to detect food/beverage objects in images captured by AIM. Faster R-CNN is a two-stage detection framework to generate bounding boxes and class labels simultaneously. In order to obtain better recognition results, we adopted transfer learning and used the model pre-trained on ImageNet48 as our starting point for training.

Block diagram of proposed method. Left top block: image based detection, left bottom block sensor based detection and Random forest classifier for integrating both detections.
The block diagram of Faster R-CNN we used is shown in Fig. 3 with example inputs with results. ResNet48 is used to extract feature maps from the input image, which are then used by the region proposal network (RPN)47 to identify areas of interest in the image from the multi-scale features, 1000 box proposals with confidence scores are obtained in this step. The region of interest (ROI) pooling layers crops and wraps the feature maps using the extracted and generated proposal boxes to obtain fine-tuned box locations and classify the food objects in the image.

Block diagram of Faster R-CNN based food and beverage object detection. ResNet is used as the feature extractor, RPN generates object proposals, and RoI pooling aligns the extracted feature map for classification and regression.
In order to obtain better recognition results, we finetuned the Faster R-CNN by using the pre-trained weights of ResNet-50 on ImageNet48 as our starting point for training. The Faster R-CNN was trained on training sets for 150 epochs with a batch size of 64 and a learning rate of 2.5e−4. The prediction scores obtained from this method were used in the hierarchical classification step.
Sensor-based food intake detection
The sensor-based food intake detection model was developed using a 3-axis accelerometer sensor signal. The accelerometer sensor recorded head movement, head direction, and temporalis muscle movement, which are used as a proxy for eating detection41,42. A Convolutional Neural Network (CNN) replaced the hand-crafted features reported in41,42. The signal was first segmented using a 15-s fixed rectangular window (total 15*128 = 1920 samples, where 128 Hz is the sampling frequency), which is called a segment. This window size was selected because it corresponds to the image capture interval. The continuous wavelet transformation (CWT) was then used for each segment. CWT represents the frequency spectrum of a signal as it changes over time. CWT was calculated considering a signal \(s\left( \tau \right)\) of length \(N\) and the mother wavelet \(\psi\):
where a is the scale and b is the translational value. In this analysis, we choose the Morse mother wavelet49 and the CWT implemented in MATLAB from MathWorks (e.g. the ‘cwtfilterbank’ function). The scalogram is the absolute magnitude of the CWT, which is calculated as follows:
The scalogram was first normalized from 0 to 1 (unit-based normalization). The values are then multiplied by 255 and converted to 8-bit unsigned integer values using the below equation. The conversion process is needed to save the scalogram as an image format.
The size of the scalogram was \(64 \times 1920\) pixels (64: frequency components of \(1 - 64\) Hz, maximum frequency captured by the accelerometer was 64 Hz due to 128 Hz sampling frequency; 1920: number of samples in a segment). The scalograms obtained from the accelerometer’s three axes were concatenated to produce a final scalogram with a size of \(192 \times 1920 \times 1\) (\(64 \times 3 = 192\)). Eventually, we modified the shape to [192 192 1] by employing under-sampling techniques. Bilinear interpolation served as the method for down-sampling, where the resulting value is computed as a weighted average of data values within the closest 2-by-2 neighborhood. This adjustment resulted in a simplified network structure and a significant reduction in the number of learnable parameters. The transformed data was then saved in the form of an image and called a scalogram. An example of the scalogram of food and non-food intake segment is presented in Fig. 4. A 15-layer CNN architecture was proposed to classify food intake and non-food intake segments. The CNN has three convolutional layers, three ReLu (rectified linear units) layers, three max-pooling layers, two cross-channel normalization layers, one dropout layer, one fully connected layer, one Softmax layer, and finally one classification layer. A convolutional neural network (CNN) employing a 1-dimensional kernel is limited to capturing local dependencies, whereas a CNN utilizing a 2-dimensional kernel has the capability to capture both local and spatial dependencies50,51. Since the proposed method used a 2-dimensional kernel, it is extracting features utilizing both the local and spatial dependencies of scalograms. This network is graphically represented in Fig. 5. The network was trained on training sets on 8 epochs with a batch size of 32. The batch size of 32 has been selected primarily because of memory constraints on the trained computer and epoch number is obtained by monitoring the loss function to prevent overfitting.

Sample scalogram of food intake and non-food intake segment.

Proposed Convolutional Neural Network Architecture for sensor-based food intake detection.
Integration of image- and sensor-based prediction
In order to combine the image and sensor methods, we adopted state-of-the-art approaches such as bagging and boosting52. The inputs were the confidence scores of the image- and sensor-based detection. Bagging is a voting-based method to combine multiple learners. In bagging, we investigated random forest53, which is an ensemble decision tree classifier. Among boosting methods, we tried adaptive boosting54, and random under-sampling boosting (RUSBoosted)55 classifiers. Linear discriminant, subspace discriminant, logistic regression, gaussian Naïve Bayes, and K-nearest neighbor classifier have also been tested and their performance in detecting eating episodes was evaluated. The best method was selected, which achieved the best performance.
Furthermore, temporal information was considered in order to improve performance even further. To predict food intake detection at the time \(t\), prior confidence scores \(t - n, \left( {n = 1, 2, \ldots } \right)\) are also used as predictors. Let, the confidence scores of a food object, \(S_{f}\), beverage object, \(S_{b}\) (if multiple food/beverage objects were detected, the highest confidence score was counted), and sensor prediction, \(S_{s}\), then the predictor vector at time \(t\) is as follows:
In this analysis, we considered \(n = 0, 1, 2\). It is to be noted that the confidence scores were acquired on a segment basis, such as within a 15-s interval. Thus, when \(n = 0\), the system evaluated a 15-s signal alongside a single image. Subsequently, for \(n = 1\), it analyzed a 30-s signal (\(15*\left( {n + 1} \right)\)) along with two images, and this pattern continued for subsequent values of n. The optimal value of n was determined by analyzing the food intake performance in a grid search approach. The process of Grid search encompassed the range of values for n, starting from \(n = 0\) and progressing to \(n = 4\), with an increment of 1.
Performance criteria
To validate the performance, four commonly used performance criteria were computed: sensitivity, specificity, F1-score, and accuracy56. These are defined as:
where TP denotes a true positive, a ‘food intake’ event correctly detected as ‘food intake’; TN denotes a true negative, a ‘non-food intake’ event correctly detected as ‘non-food intake’; FN denotes a false negative, a ‘food intake’ event incorrectly detected as ‘non-food intake’; and FP denotes a false positive, a ‘non-food intake’ event. It should be noted that for this binary classification, all eating activities, including drinking beverages, are collectively categorized as ‘food intake’. Furthermore, we also reported performance results in terms of eating episode detection. During a standard eating episode, a bite is succeeded by a series of chews and swallows, and this cycle is reiterated until a portion of food is consumed to fulfill one's appetite29. Moreover, eating events from an individual with a < 15 min inter-event interval were combined into one eating episode57.
We used mean Average Precision (mAP) as our evaluation metric for image-based food and beverage detection. The predicted detection is considered a true positive (TP) if the detected label equals the ground-truth label, and the overlap ratio of the IoU (Intersection over Union) between the detected bounding box and ground truth is not smaller than a predefined threshold. The Average Precision (AP) is calculated as the area under the Precision-Recall curve, which involves computing Precision and Recall at various confidence score thresholds ranging from 0 to 1 with an increment of 0.1. The mean Average Precision (mAP) is then obtained by averaging the AP scores over a set of IoU thresholds. We choose to use the mAP with a set of IoU thresholds from 0.5 to 0.95 with a 0.05 increment, which is a generalized metric and serves as the main evaluation metric for the MS COCO object detection challenge52. We denote this metric as mAP@[.5,.95], which serves as a strict criterion for evaluating object detection methods. For reference, the current Top-1 result in the MS COCO object detection challenge achieves an mAP@[.5,.95] of 58.8.
Furthermore, we used McNemar’s test52 to determine if the performances of the two classification methods were statistically similar or different. Let, \(e_{01} :\) the number of eating episodes misclassified by Classifier-1 but not Classifier-2, and \(e_{10} :\) the number of eating episodes misclassified by Classifier-2 but not Classifier-1. The classification methods have the same error rate under the null hypothesis, we expect \(e_{01} = e_{10}\) and these equal to \((e_{01} = e_{10} )/2\). The chi-square statistic of one degree of freedom was calculated as follows.
McNemar’s test rejects the hypothesis that the error rates of the two classification methods are the same at the significance level of α if this value is greater than \(\chi_{\alpha ,1}^{2}\). For \(\alpha = 0.01, \chi_{0.01,1}^{2} = 6.635\).
Results
Table 1 shows the results of image-based food and beverage detection. The overall detection performance achieved using the holdout validation technique is 51.97 mAP@[.5,.95] score, which is an excellent result considering the variety of foods and beverages (190 items). In LOSO cross-validation, the detection performance dropped to 20.10 mAP@[.5,.95]. Because the food items of each subject differed, the trained classifier was unable to detect food objects that it had not previously seen. Figure 6. shows examples of food and beverage detection. It demonstrates that the proposed algorithm successfully detected both food and beverage objects. It is important to note that all the results presented in this paper are derived solely from data collected during free-living days.

Example of food and beverage recognition (blue bounding box—solid food, red—beverages).
Performance results of sensor-based food intake detection on LOSO cross-validation are presented in Table 2. The performance results are reported in terms of the mean and standard deviation of each subject’s performance. 77.55% F1-score was obtained using the proposed CNN architecture. The performance outcomes were based on 15-s segment-based detection. It also produced a good number of false-positive detections.
Table 3 shows the performance of the integrated classifier. We used the holdout validation technique to find the best classifier, and the performance results are reported on a segment basis. The best precision and F1-score were obtained using the Random Forest classifier (parameters: Maximal number of decision splits (or branch nodes) per tree = 1000, Number of ensembles learning cycles = 30, Misclassification cost = [0 1; 2 0] two times for food intake segment). It provided the best performance because this problem is non-linear, and the ensemble approach assisted in overcoming critical cases. Thus, in this proposed method, we choose a random forest classifier to integrate image and sensor detection.
Moreover, classification performance using temporal confidence scores is presented in Table 4. In Table 4, the random forest classifier was used. It is observed that after adding the confidence scores from previous segments/images, the classification performance improved. For example, in the case of \(n = 1\), sensitivity and F1-score were improved by 1% and 2%, respectively. Likewise, increasing the value of \(n\) progressively enhances performance. A higher \(n\) value yields improved results in food intake detection; nevertheless, it necessitates reliance on larger sets of preceding confidence scores. Moreover, increasing \(n\) may lead to better performance in large meals but miss small eating episodes. The dataset is too small to explore this thoroughly.
Finally, the performance of the integrated classifier was compared using the LOSO cross-validation technique, as shown in Table 5. To enable a meaningful comparison with the state-of-the-art method29, here, performance is measured in terms of eating episodes. In terms of sensitivity, the integrated classifier outperformed the sensor- and image-based methods by 8% and 6%, respectively. In comparison, the integrated method improved the precision and F1-score by up to 20% and 17%, respectively, over the image-based method. The integrated classifier was chosen due to its capacity to improve sensitivity while preserving the f1 score at a minimal reduction of just 0.24% when compared to the sensor-based method.
McNemar’s test was used to determine whether the performance of the Image, Sensor, and Integrated classification methods was statistically similar or different. The number of misclassified eating episode detection metrics was used in this test. We started by comparing the image-based classifier (C1) and the integrated classifier (C3). Due to a high number of false eating episodes detected by C1, the number of eating episodes misclassified by C1 but not C3 was \(70\). And the number of eating episodes misclassified by C3 but not C1 was 6. Thus, the calculated chi-square was \(\chi_{1}^{2} = 52.22\). McNemar’s test rejected the hypothesis at a significant level \(\alpha = 1\%\), due to the \(\chi_{1}^{2}\) is greater than 6.635. Similarly, in the same way, we also tested sensor-based classifier (C2) with integrated classifier (C3) and found \(\chi_{1}^{2} = 7.09\). Thus, McNemar’s test also rejected the null hypothesis that the two classification methods have the same error rate at a significant rate \(= 1\%\). So, the integrated classification method is statistically different than image-based and sensor-based methods.
Discussion
The primary goal of this research was to develop and validate an accurate food intake detection method. Following the main goal, this work first demonstrated the method for detecting food and beverage objects from images, then food intake detection using sensor signals, and finally combining those detections to obtain final food intake detection. The overall AP score for food and beverage object detection is 51.97, which is a good object detection score. However, this object detection cannot tell whether the detected food was consumed by the user. For example, if a person is preparing food, cooking food, or socializing, the food object in front of that person can be detected, resulting in false-positive food intake detection. The accelerometer-based food intake detection algorithm, on the other hand, is 86.59% accurate for ingestion events.
The main disadvantage of the sensor-based method is that it cannot detect drinking episodes because there is no chewing involved. However, it may detect false positives in the case of chewing gum. The image-based method, on the other hand, detects false eating episodes because it cannot distinguish whether a food is consumed or not. In this paper, we combined image and sensor-based detection to address these shortcomings. Because it successfully removed false detection of individual sensors, we saw a significant improvement in food intake detection performance. The integrated technique finds more actual eating episodes (due to increased sensitivity). When compared to image-based food and beverage detection, it improves detection on all performance criteria, including sensitivity, precision, and f1-score.
Additionally, we compared the proposed method to a recently published method29. When considering both solid foods and beverages, a significant performance improvement (37% more sensitive) was achieved. One of the most significant contributions of this paper is its ability to detect both solid and liquid dietary intake. This performance improvement was achieved because the proposed method successfully eliminated false-positive detection and can detect both solid food and beverage intake. Figure 7 shows a demonstration of food intake detection using an integrated two-stage classifier. Note that for this subject, false positives (eating detections that do not match eating episodes in the ground truth data) have been eliminated.

Food intake detection outcome obtained using proposed integrated method. Top to bottom: ground truth, sensor-based classifier, image-based food detection, image based beverage detection and Integrated (image and sensor) based classifier.
We observed a decrease in performance on food and beverage object detection using the LOSO cross-validation technique. In order to improve object detection performance, we will train the classifier with more image data that includes a wider range of background scenes and food items in the future. Furthermore, we investigate sensor-based detection failure cases. We discovered that it failed in the case of short-eating events or snacks, such as a bite of chips, a few bites of semi-solid yogurt, and a small chocolate. Those eating episodes are extremely difficult for any sensor to detect (chewing sensor or image). The integrated method fails to detect those as well. An additional constraint of this proposed method is the relatively small image dataset, consisting of only 190 types of foods and beverages. To cultivate a resilient food and beverage detection algorithm, a more substantial volume of data is requisite for training. Moreover, most people (in free-living) eat their meals socially, thus it is very difficult to label food/beverage items of that social eating.
Conclusion
Automatic food intake detection in a free-living environment is a difficult task. This study showed that integrating image and chewing sensor (accelerometer) based prediction provides accurate and precise performance. In terms of eating episode detection, the proposed method achieved 94.59% sensitivity, 70.47% precision, and 80.77% f1-scores. It can detect both solid and liquid dietary consumption. Accurate detection of eating episodes in free-living may benefit from incorporating multiple sources into the decision-making process. In future developments, the proposed approach holds potential for deployment on a cloud-based server, enabling the provision of remote monitoring data. Moreover, there is scope to extend the method to encompass other food intake monitoring metrics, such as chewing/eating rate, dining environment analysis, and estimation of total caloric intake.
Data availability
The data used in this paper are protected under the University of Alabama IRB. The dataset may be made available upon request contingent on establishing an inter-institutional data sharing agreement.
References
Hall, K. D. et al. Energy balance and its components: Implications for body weight regulation. Am. J. Clin. Nutr. 95, 989–994 (2012).
Schoeller, D. A. & Thomas, D. Energy balance and body composition. In Nutrition for the Primary Care Provider, vol. 111 13–18 (Karger, 2015).
Feigin, V. L. et al. Global burden of stroke and risk factors in 188 countries, during 1990–2013: A systematic analysis for the Global Burden of Disease Study 2013. Lancet Neurol. 15, 913–924 (2016).
Bingham, S. A. et al. Comparison of dietary assessment methods in nutritional epidemiology: Weighed records v. 24 h recalls, food-frequency questionnaires and estimated-diet records. Br. J. Nutr. 72, 619–643 (1994).
Lopes, T. S. et al. Misreport of energy intake assessed with food records and 24-h recalls compared with total energy expenditure estimated with DLW. Eur. J. Clin. Nutr. 70, 1259–1264 (2016).
Kawano, Y. & Yanai, K. Foodcam: A real-time food recognition system on a smartphone. Multimed. Tools Appl. 74, 5263–5287 (2015).
Casperson, S. L. et al. A mobile phone food record app to digitally capture dietary intake for adolescents in a free-living environment: Usability study. JMIR MHealth UHealth 3, e30 (2015).
Boushey, C. J., Spoden, M., Zhu, F. M., Delp, E. J. & Kerr, D. A. New mobile methods for dietary assessment: Review of image-assisted and image-based dietary assessment methods. Proc. Nutr. Soc. 76, 283–294 (2017).
Mezgec, S. & Seljak, B. K. NutriNet: A deep learning food and drink image recognition system for dietary assessment. Nutrients 19, 7 (2017).
Jia, W. et al. Accuracy of food portion size estimation from digital pictures acquired by a chest-worn camera. Public Health Nutr. 17, 1671–1681 (2014).
O’Loughlin, G. et al. Using a wearable camera to increase the accuracy of dietary analysis. Am. J. Prev. Med. 44, 297–301 (2013).
Jia, W. et al. Automatic food detection in egocentric images using artificial intelligence technology. Public Health Nutr. 2018, 1–12. https://doi.org/10.1017/S1368980018000538 (2018).
Hassan, M. A. & Sazonov, E. Selective content removal for egocentric wearable camera in nutritional studies. IEEE Access 8, 198615–198623 (2020).
Krizhevsky, A., Sutskever, I. & Hinton, G. E. Imagenet classification with deep convolutional neural networks. Commun. ACM 60, 84–90 (2017).
Liu, C. et al. Deepfood: Deep learning-based food image recognition for computer-aided dietary assessment. In International Conference on Smart Homes and Health Telematics 37–48 (Springer, 2016).
Wang, Y. Context based image analysis with application in dietary assessment and evaluation. Multimed. Tools Appl. 2018, 26 (2018).
Thomaz, E., Zhang, C., Essa, I. & Abowd, G. D. Inferring Meal Eating Activities in Real World Settings from Ambient Sounds: A Feasibility Study. In Proceedings of the 20th International Conference on Intelligent User Interfaces 427–431 (2015).
S. Päßler & W. Fischer. Acoustical method for objective food intake monitoring using a wearable sensor system. In 2011 5th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth) and Workshops 266–269 (2011).
O. Amft. A wearable earpad sensor for chewing monitoring. In SENSORS, 2010 IEEE 222–227 (2010). https://doi.org/10.1109/ICSENS.2010.5690449.
Bi, Y., Xu, W., Guan, N., Wei, Y. & Yi, W. Pervasive eating habits monitoring and recognition through a wearable acoustic sensor. In Proceedings of the 8th International Conference on Pervasive Computing Technologies for Healthcare 174–177 (2014).
Sazonov, E. S. & Fontana, J. M. A sensor system for automatic detection of food intake through non-invasive monitoring of chewing. IEEE Sens. J. 12, 1340–1348 (2012).
Makeyev, O., Lopez-Meyer, P., Schuckers, S., Besio, W. & Sazonov, E. Automatic food intake detection based on swallowing sounds. Biomed. Image Restor. Enhanc. 7, 649–656 (2012).
Fontana, J. M., Farooq, M. & Sazonov, E. Automatic ingestion monitor: A novel wearable device for monitoring of ingestive behavior. IEEE Trans. Biomed. Eng. 61, 1772–1779 (2014).
J. M. Fontana & E. S. Sazonov. A robust classification scheme for detection of food intake through non-invasive monitoring of chewing. In 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society 4891–4894 (2012). https://doi.org/10.1109/EMBC.2012.6347090.
Alshurafa, N. et al. Recognition of nutrition intake using time-frequency decomposition in a wearable necklace using a piezoelectric sensor. IEEE Sens. J. 15, 3909–3916 (2015).
Kalantarian, H., Alshurafa, N., Le, T. & Sarrafzadeh, M. Monitoring eating habits using a piezoelectric sensor-based necklace. Comput. Biol. Med. 58, 46–55 (2015).
Abisha, P. & Rajalakshmy, P. Embedded implementation of a wearable food intake recognition system. In 2017 International Conference on Innovations in Electrical, Electronics, Instrumentation and Media Technology (ICEEIMT) 132–136 (2017). https://doi.org/10.1109/ICIEEIMT.2017.8116821.
Farooq, M. & Sazonov, E. Segmentation and characterization of chewing bouts by monitoring temporalis muscle using smart glasses with piezoelectric sensor. IEEE J. Biomed. Health Inform. 21, 1495–1503 (2017).
Doulah, A. B. M. S. U., Ghosh, T., Hossain, D., Imtiaz, M. H. & Sazonov, E. “Automatic ingestion monitor version 2”—a novel wearable device for automatic food intake detection and passive capture of food images. IEEE J. Biomed. Health Inform. 2020, 1–1. https://doi.org/10.1109/JBHI.2020.2995473 (2020).
Zhang, R. & Amft, O. Bite glasses: Measuring chewing using emg and bone vibration in smart eyeglasses. In Proceedings of the 2016 ACM International Symposium on Wearable Computers 50–52 (2016).
Bi, S. et al. Toward a wearable sensor for eating detection. In Proceedings of the 2017 Workshop on Wearable Systems and Applications 17–22 (2017).
Dong, B. & Biswas, S. Meal-time and duration monitoring using wearable sensors. Biomed. Signal Process. Control 32, 97–109 (2017).
Dong, B., Biswas, S., Gernhardt, R. & Schlemminger, J. A mobile food intake monitoring system based on breathing signal analysis. In Proceedings of the 8th International Conference on Body Area Networks 165–168 (2013).
Xie, J. & Wang, Q. A variable state dimension approach to meal detection and meal size estimation: In silico evaluation through basal-bolus insulin therapy for type 1 diabetes. IEEE Trans. Biomed. Eng. 64, 1249–1260 (2017).
Samadi, S. et al. Meal detection and carbohydrate estimation using continuous glucose sensor data. IEEE J. Biomed. Health Inform. 21, 619–627 (2017).
Turksoy, K. et al. Meal detection in patients with type 1 diabetes: A new module for the multivariable adaptive artificial pancreas control system. IEEE J. Biomed. Health Inform. 20, 47–54 (2016).
Anderez, D. O., Lotfi, A. & Langensiepen, C. A Hierarchical Approach in Food and Drink Intake Recognition Using Wearable Inertial Sensors. In Proceedings of the 11th PErvasive Technologies Related to Assistive Environments Conference 552–557 (2018).
Kyritsis, K., Diou, C. & Delopoulos, A. Modeling wrist micromovements to measure in-meal eating behavior from inertial sensor data. IEEE J. Biomed. Health Inform. 23, 2325–2334 (2019).
Thomaz, E., Bedri, A., Prioleau, T., Essa, I. & Abowd, G. D. Exploring Symmetric and Asymmetric Bimanual Eating Detection with Inertial Sensors on the Wrist. IN Digit. Proc. 1st Workshop Digit. Biomark. June 23 2017 Niagara F. NY USA Workshop Digit. Biomark. 1st 2017 Niagara F. N, vol. 2017 21–26 (2017).
Heydarian, H. et al. Deep learning for intake gesture detection from Wrist-Worn inertial sensors: The effects of data preprocessing, sensor modalities, and sensor positions. IEEE Access 8, 164936–164949 (2020).
Rahman, S. A., Merck, C., Huang, Y. & Kleinberg, S. Unintrusive eating recognition using Google glass. In Proceedings of the 9th International Conference on Pervasive Computing Technologies for Healthcare 108–111 (ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering), 2015).
Farooq, M. & Sazonov, E. Accelerometer-based detection of food intake in free-living individuals. IEEE Sens. J. 18, 3752–3758 (2018).
Heydarian, H., Adam, M. T., Burrows, T. & Rollo, M. E. Exploring score-level and decision-level fusion of inertial and video data for intake gesture detection. IEEE Access 1, 1 (2021).
Ghosh, T. & Sazonov, E. A comparative study of deep learning algorithms for detecting food intake. In 2022 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC) 2993–2996 (IEEE, 2022).
Hossain, D., Ghosh, T. & Sazonov, E. Automatic count of bites and chews from videos of eating episodes. IEEE Access 8, 101934–101945 (2020).
Get Started with the Image Labeler—MATLAB & Simulink. https://www.mathworks.com/help/vision/ug/get-started-with-the-image-labeler.html (2022).
Ren, S., He, K., Girshick, R. & Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. ArXiv Prepr. ArXiv150601497 (2015).
He, K., Zhang, X., Ren, S. & Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 770–778 (2016).
Lilly, J. M. & Olhede, S. C. Generalized Morse wavelets as a superfamily of analytic wavelets. IEEE Trans. Signal Process. 60, 6036–6041 (2012).
Morales, F. J. O. & Roggen, D. Deep convolutional feature transfer across mobile activity recognition domains, sensor modalities and locations. In Proceedings of the 2016 ACM International Symposium on Wearable Computers 92–99 (2016).
Han, X., Ye, J., Luo, J. & Zhou, H. The effect of axis-wise triaxial acceleration data fusion in cnn-based human activity recognition. IEICE Trans. Inf. Syst. 103, 813–824 (2020).
Alpaydin, E. Introduction to Machine Learning (MIT press, UK, 2020).
Breiman, L. Random forests. Mach. Learn. 45, 5–32 (2001).
Freund, Y. & Schapire, R. E. A decision-theoretic generalization of on-line learning and an application to boosting. J. Comput. Syst. Sci. 55, 119–139 (1997).
Seiffert, C., Khoshgoftaar, T. M., Van Hulse, J. & Napolitano, A. RUSBoost: Improving classification performance when training data is skewed. In 2008 19th international conference on pattern recognition 1–4 (IEEE, 2008).
David, M. W. Powers. Evaluation: From precision, recall and f-factor to roc, informedness, markedness & correlation. Technical report, Journal of Machine Learning Technologies. 2, 37–63 (2007).
Gill, S. & Panda, S. A smartphone app reveals erratic diurnal eating patterns in humans that can be modulated for health benefits. Cell Metab. 22, 789–798 (2015).
Acknowledgements
Research reported in this publication was supported by the National Institute of Diabetes and Digestive and Kidney Diseases of the National Institutes of Health under Award Number R01DK100796. The content is solely the responsibility of the authors and does not necessarily represent the official views of the National Institutes of Health.
Author information
Authors and Affiliations
Contributions
All authors contributed to the interpretation of results and manuscript production. T.G. and E.S. developed the sensor detection model and integrated classifier. Y.H. and E.J.D. developed the image-based model. T.G., V.R., D.H., M.A.M., J.H. and E.S. conducted the human study to collect data. T.G. and Y.H. wrote the first draft, while E.S., E.J.D., M.A.M., J.H. and C.B. provided critical revision.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ghosh, T., Han, Y., Raju, V. et al. Integrated image and sensor-based food intake detection in free-living. Sci Rep 14, 1665 (2024). https://doi.org/10.1038/s41598-024-51687-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-51687-3
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
