
Abstract
In this paper we study the oscillatory behavior of a new class of memristor based neural networks with mixed delays and we prove the existence and uniqueness of the periodic solution of the system based on the concept of Filippov solutions of the differential equation with discontinuous right-hand side. In addition, some assumptions are determined to guarantee the globally exponentially stability of the solution. Then, we study the adaptive finite-time complete periodic synchronization problem and by applying Lyapunov–Krasovskii functional approach, a new adaptive controller and adaptive update rule have been developed. A useful finite-time complete synchronization condition is established in terms of linear matrix inequalities. Finally, an illustrative simulation is given to substantiate the main results.
Similar content being viewed by others


Introduction
Recurrent neural network (RNN) is a deep learning model characterized by a topology that allows all connections between neurons, and by the fact each neuron usually has a complicated structure because of a large number of parallel connections with a diversity of axon lengths1,2. In addition, RNNs are well known for their capacity of classification, detecting regularities and their ability to learn. They can play the role of memory through feedback and are perfectly able to receive sensory data from our future agent3,4. In particular, continuous time RNNs (CTRNNs) are RNNs modeled by dynamical systems in the form of differential equation; they combine machine learning and physical modeling5,6,7. In fact, CTRNNs are mathematically easier to analyze, and continuous formulation offers more flexibility in adapting the system to the problem and adding constraints. Actually, researchers are attracted to the mathematical properties of RNNs, namely, the nature of solutions, stability and the oscillation properties8,9.
Indeed, the dynamic properties of RNNs have been deeply discussed and several important works have been provided10,11,12,13. In particular, RNNs which exhibit periodic oscillation have been used to encode information in the vibration phase and to model many systems in many domains such as celestial mechanics, nonlinear vibration, electromagnetic theory, engineering, robotics14,15,16,17,18,19. In addition, the synchronization problem consists of analyzing the behavior between two systems: driver (or master) and responder (or slave) and could be seen in different real systems such as secure communication, information science, chaos generators and signal generators design, image processing, biological systems20,21. In fact, neuronal synchronization becomes one of the most attractive subjects in neuroscience, it indicates that the specific states of all the neurons in the neural networks converge to a common value22,23,24,25.
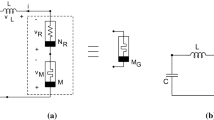
To make these oscillating neurons, researchers are interested in the memristor component that is a combination of memory and resistor26,27. Chua pointed out that the behaviour of memristor is somewhat similar to the synapses in the human brain28, and it can potentially offer both high connectivity and high density needed for efficient computing compared to other storage. A memristive neural networks (MNN) is described in Fig. 1. In addition, memristor studies show that MNN exhibits the feature of pinched hysteresis which means that a lag occurs between the application and the removal of a field and its subsequent effect, just as the neurons in the human brain have29,30,31. Some studies have been discussed to analyze the dynamic behaviour of MNN and a lot of researches were released32,33,34,35.

Memristive neural network with 5 neurons.
Hence, one can ask what is the impact of the delays (time-varying and distributed delay) for the stability and the synchronization of the periodic solution of MNNs. In Ref.10, authors investigate whether periodic solutions exist, are unique and stable for a large class of memristor-based neural networks with time-varying delays. Moreover, a novel and useful finite-time complete synchronization condition is obtained in terms of linear matrix inequalities to ensure the synchronization goal in Ref.36.
In this work, we extend these studies and the mathematical model of MNN with mixed delays. In fact, we analyse the stability of equilibrium points with executing significant results of the period behavior of the system. After that, we study the phenomena of synchronization from the point of view of the theory and control. In the considered system, the weights are discontinuous; the classical definition of the solution for differential equations cannot apply here. Therefore we shall propose the Filippov solution to handle this problem. Filippov developed a solution to the differential equation with a discontinuous right-hand side37. Based on this definition, a differential equation with a discontinuous right-hand side has the same solution set as a differential inclusion. Our contribution consists to investigate the existence and exponential stability of the periodic solutions for memristor-based neural networks with time-varying delays in the leakage term. The stability properties of this model are then analyzed and we show that the solutions of this new linear system converge to a periodic and stable limit cycle. The main novelty of our contribution lies in solving the problems of stability and synchronization and we demonstrate the impact of the mixed delays. Also results enhance and extend earlier studies on neural network dynamical systems with a continuous or discontinuous right-hand side that are memristor-based or conventional.
The rest of this paper is organized as follows. A delayed memristor-based neural networks is presented and some necessary definitions are given in “Model description and preliminaries” section. In “Uniqueness and global exponential stability” section, we introduce the Filippov’s solution for our system and the existence of periodic solutions of the system. Our approaches are based on the differential inclusions and topological degree theories in set-valued analysis. In “Finite-time periodic synchronization” section, we shall study the uniqueness and global exponential stability of the w-periodic solution for the system. Especially, when the system is autonomous, we will give the sufficient conditions, uniqueness and global exponential stability of equilibrium point of the proposed system. Moreover, we designed novel control algorithms for the finite-time periodic synchronization to select neurons to pin the designed controller. In “Conclusions” section, a numerical example is obtained to show the effectiveness of the theoretical results given in the previous sections. It should be mentioned that the main results of this paper are Theorems 1–5.
Model description and preliminaries
In this paper, we shall investigate the following memristive neural networks with time-varying delay:
where \(n\ge 1\) represents the number of neurons in the network, \(x_{i}(t)\) correponds to the potential membrane of the neuron i at time t, the \(a_{i}\) is a positive constant rate with which the i th neuron will reset its potential to the resting state in isolation when it is disconnected. In addition, \(f_{j},\,g_{j},\,h_{j}\) and \(\phi _{j}\) denote the activation functions of jth neuron at time t, \(b_{ij}(t),c_{ij}(t),\) \(p_{ij}(t)\) are the synaptic connection weight of the unit j on the unit i at time t, \(J_{i}\) is the input unit i and \(\tau _{ij}(t)\) corresponds to the transmission delay of the ith unit along the axon of the jth unit at time t and is continuously differentiable function satisfying
where \(\tau =max_{1\le i,j\le n}\left\{ max_{t\in \left[ 0,\omega \right] },\tau _{ij}(t)\right\} ,\) \(\tau\) is a nonnegative constant, \(b_{ij}(t)\), \(c_{ij}(t-\tau _{ij}(t))\) and \(p_{ij}(t)\) are memristive synaptic weights. Basing on memristor feature and the current-voltage characteristic, we write:
for \(i,\,j=1,2,\ldots ,n\); \(t\in R\), where \(T_{j}>0\) is a switching jumps and let \(\bar{a}_{i}>0\), \(\underline{a}_{i}>0\), \(\overline{b}_{ij}\), \(\underline{b}_{ij}\) , \(\overline{c}_{ij}\), \(\underline{c}_{ij}\), \(\overline{p}_{ij}\), \(\underline{p}_{ij}\) for \(i,j=1,2,\ldots ,n\) are all constants.
Definition 1
(Periodic solution). A solution x(t) of system (1) on \([0,+\infty [\) is a \(\omega\)-periodic solution with period \(\omega\) if
\(x(t+\omega )=x(t)\), for all \(t\ge 0\).
Throughout this paper, we always assume the following hypothesis:
(H1) \(a_{i}(.),\overline{b}_{ij}(.),\underline{b}_{ij}(.),\overline{c}_{ij}(.),\underline{c}_{ij}(.),\overline{p}_{ij}(.),\underline{p}_{ij}(.),\tau _{ij}(.)\) and \(J_{i}(.)\) are continuous and w-periodic functions.
(H2) The neuron activation functions \(f_{j}(.)\), \(g_{j}(.)\) and \(h_{j}(.)\) are Lipschitz-continuous on \(\mathbb {R}\) with Lipschitz constants \(F_{j}>0\), \(G_{j}>0\) and \(H_{j}>0\) respectively, i.e.,
\(\begin{array}{c} |f_{j}(x)-f_{j}(y)|<F_{j}|x-y|,|g_{j}(x)-g_{j}(y)|<G_{j}|x-y|, |h_{j}(x)-h_{j}(y)|<H_{j}|x-y|, \end{array}\) for all \(x,y\in \mathbb {R}\) and for all \(j=1,2,..,n.\)
(H3) \(\exists M,\alpha \in \mathbb {R}_{+}\) such that \(|k_{ij}(t-s)|= {\left\{ \begin{array}{ll} =0, &{} s\le 0\\ \le Me^{-\alpha (t-s)}, &{} 0\le s\le t \end{array}\right. }.\)
Definition 2
We say that a square matrix is an M-matrix if it has all nonpositive elements outside the diagonal and all positive successive principal minors38.
Lemma 1
39 Given matrix \(M=(m_{ij})_{n\times n}\) with nonpositive off-diagonal elements is a nonsingular M-matrix if and only if one of the following conditions holds:
-
(1)
There exist n positive constants \(\alpha _{1},\alpha _{2},\ldots \alpha _{n}\) such that \(\alpha _{i}m_{ii}+\overset{n}{\underset{j=1,j\ne i}{\sum }}\alpha _{j}m_{ji}>0,\,i=1,\ldots ,n.\)
-
(2)
There exist n positive constants \(\beta _{1},\beta _{2},\ldots \beta _{n}\) such that \(\beta _{i}m_{ii}+\overset{n}{\underset{j=1,j\ne i}{\sum }}\beta _{j}m_{ij}>0,\,i=1,\ldots ,n\).
Definition 3
(Clarke Regular40) \(V(x):\mathbb {R}^{n}\rightarrow \mathbb {R}\) is said to be regular, if for each \(x\in \mathbb {R}^{n}\) and \(v\in \mathbb {R}^{n}\)
-
(1)
there exists the usual right directional derivative \(D^{+}V(x,v)=\underset{h\longrightarrow 0^{+}}{lim}\frac{V(x+hv)-V(x)}{h}\),
-
(2)
the generalized directional derivative of V at x in the direction \(v\in \mathbb {R}^{n}\) is defined as \(D^{++}V(x,v)=\underset{y\rightarrow x,h\longrightarrow 0^{+}}{lim}\frac{V(y+hv)-V(y)}{h}\), then \(D^{+}V(x,v)=D^{++}V(x,v)\).
Definition 4
Consider the column vector \(x=(x_{1},x_{2},\ldots ,x_{n})^{T}\), where T denotes the transpose of a vector, \(\left\| x\right\|\) denotes any vector norm in \(\mathbb {R}^{n}\). \(\left\| x\right\| _{1}=\overset{n}{\underset{j=1}{\sum }}|x_{i}|,\) \(\left\| x\right\| _{2}=\left[ \overset{n}{\underset{j=1}{\sum }}x_{i}^{2}\right] ^{\frac{1}{2}}\).
Let the set \(A\in \mathbb {R}^{n},\,\overline{co}[A]\) denotes the closure of the convex hull of A, \(\mu (A)\) is the Lebesgue measure of A, and \(\partial A\) is the boundary of A.
Definition 5
For a locally Lipschitz function \(V(x):\mathbb {R}^{n}\rightarrow \mathbb {R}\), we can define Clarke’s generalized gradient of V at point x, as follows
where \(\Omega \subset \mathbb {R}^{n}\) is the set of points where V is not differentiable and \(N\subset \mathbb {R}^{n}\) is an arbitrary set with measure zero41. In the following, for a continuous \(\omega\)-periodic function f(t) defined on \(\mathbb {R}\), we define
Given \(C_{\tau }:=C([-\tau ,0])\) defines a Banach space of all continuous functions \(e:[-\tau ,0]\rightarrow \mathbb {R}\).
For \(x\in \mathbb {R}^{n}\), we can write \(x\in C_{\tau }\) means \(x(s)\equiv x\) in \([-\tau ,0]\). Given \(e\in C_{\tau }\), let \(\left\| e\right\| _{c}=sup\left| e(s)\right|\).
The initial states proposed for system (1) are as follow
Consider \(x_{t}\in C([-\tau ,0],\mathbb {R}^{n})\) described by \(x_{t}(s)=x(t+s),\) \(-\tau \le s\le 0\), and the initial states (10) can be rewritten as
Suppose that \(A\subset \mathbb {R}^{n}\), then \(x\rightarrow \phi (x)\) is said a set-valued map from A to \(\mathbb {R}^{n}\), if for every point \(x\in A\), there exists a nonempty set \(\phi (x)\subset \mathbb {R}^{n}\). We call a set-valued map \(\phi\) with nonempty values, an upper semicontinuous at \(x_{0}\in A\), if for every open set N containing \(\phi (x_{0})\), there exists a neighborhood M of \(x_{0}\) such that \(\phi (M)\subset N\). The map \(\phi (x)\) is said to have a closed (convex, compact) image if for each \(x\in A\), \(\phi (x)\) is closed (convex, compact).
Existence of periodic solution
In the rest of this section we will investigate the existence of periodic solutions of the generalized memristor system.
By the differential equation system (1), we consider the set-valued maps as follow: for \(t\in \mathbb {R}\) and \(i,j=1,2,\ldots ,n,\)
It is clear that \(K[b_{ij}(x_{i}(t))]\), \(K[c_{ij}(x_{i}(t))]\) and \(K[p_{ij}(x_{i}(t))]\) are all closed, convex and compact for every \(t\in \mathbb {R}\) and \(i,j=1,\ldots ,n\).
A function x(t) is said to be a solution of system (1) on [0, T) with initial condition (7) or (8), if x(t) is absolutely continuous on any compact interval of [0, T] and satisfies differential inclusions:
or there exist \(\gamma _{ij}(t)\in K[b_{ij}(x_{i}(t))]\), \(\eta _{ij}(t)\in K[c_{ij}(x_{i}(t))]\) and \(\nu _{ij}(t)\in K[p_{ij}(x_{i}(t))]\) satisfy
for a. a. \(t\in [0,T),\,i=1,2,\ldots ,n.\)
In the following, we discuss dynamical behavior of system (1) using the following set-valued version of the Mawhin coincidence theorem.
Lemma 2
(Mawhin coincidence theorem42) Suppose that \(\phi :\mathbb {R}\times \mathbb {R}^{n}\rightarrow K_{\nu }(\mathbb {R}^{n})\) is upper semicontinuous and \(\omega\)-periodic in t. If the following conditions hold:
-
(1)
There exists a bounded open set \(\Delta \subset C_{\omega }\), the set of all continuous, \(\omega\)-periodic functions: \(\mathbb {R}\rightarrow \mathbb {R}^{n}\), such that for any \(\lambda \in (0,1)\), each \(\omega\)-periodic function x(t) of the inclusion
$$\begin{aligned} \displaystyle \frac{dx}{dt}\in \lambda \phi (t,x), \end{aligned}$$(13)satisfies \(x\notin \partial \Delta\) if it exists.
-
(2)
Each solution \(z\in \mathbb {R}^{n}\) of the inclusion \(0\in \frac{1}{\omega }\intop _{0}^{\omega }\phi (t,z)dt=g_{0}(z)\) satisfies \(z\notin \partial \Delta \cap \mathbb {R}^{n};\)
-
(3)
\(deg(g_{0},\Delta \cap \mathbb {R}^{n},0)\ne 0\), then differential inclusion (13) has at least one \(\omega\)-periodic solution x(t) with \(x\in \bar{\Delta }\). If a matrix \(O\ge 0\) then all elements of O are greater than or equal to 0, and similarly we can describe \(O>0\). It follows that for given vectors or matrices O and P, \(O\ge P\) (or \(O>P\)) and similarly that \(O-P\ge 0\) (or \(O-P>0\)). After that, we give sufficient conditions to guarantee the existence of periodic solutions for the memristive neural network.
Theorem 1
We consider \(I\rightarrow S\) an M-matrix, where I is the identity matrix of dimension n, \(S=(s_{ij})_{n\times n}\) and
(H4) \(s_{ij}=\frac{1}{a_{i}^{l}}\left( b_{ij}^{u}F_{j}+\frac{c_{ij}^{u}G_{j}}{\sqrt{1-\tau _{ij}^{D}}}+\frac{M}{\alpha }p_{ij}^{u}F_{j}\right) ,\,i,\,j=1,2,..,n,\)
where \(b_{ij}^{u}=max\left\{ \overline{b}_{ij}^{u},\underline{b}_{ij}^{u}\right\} ,\) \(c_{ij}^{u}=max\left\{ \overline{c}_{ij}^{u},\underline{c}_{ij}^{u}\right\}\) and \(p_{ij}^{u}=max\left\{ \overline{p}_{ij}^{u},\underline{p}_{ij}^{u}\right\} .\)
Then there exists at least one \(\omega\)-periodic solution of system (1).
Proof
Define \(E_{\omega }=\left\{ x(t)\in C(\mathbb {R},\mathbb {R}^{n}):\,x(t+\omega )=x(t)\right\} ,\) and for \(x(t)\in E_{\omega }\)
\(\left\| x(t)\right\| _{C_{\omega }}=\overset{n}{\underset{i=1}{\sum }}\underset{t\in \left[ 0,\omega \right] }{max}|x_{i}(t)|.\)
Then \(E_{\omega }\) is a Banach space equipped with the norm \(\left\| .\right\| _{E_{\omega }}\).
Let for \(x(t)\in E_{\omega }\),
where
\(i=1,2,..,n.\)
Let assumption (H4) holds, \(\phi (t,x)\) is an upper semicontinuous set-valued map with nonempty compact convex values under H4. Here we need to find an appropriate open, bounded subset \(\Delta\), in order to apply Mawhin-Like Coincidence Theorem (Lemma 2),
From the differential inclusion (13), we obtain
Given \(x(t)=(x_{1}(t),x_{2}(t),\ldots ,x_{n}(t))^{T}\) an arbitrary \(\omega\)-periodic solution of the differential inclusion (14) for a certain \(\lambda \in (0,1)\). There exist \(\gamma _{ij}(t)\in K[b_{ij}(x_{j}(t))]\) and \(\eta _{ij}(t)\in K[c_{ij}(x_{j}(t))]\) \(\nu _{ij}(t)\in K[p_{ij}(x_{j}(t))]\) satisfy
for a [0, T), \(i=1,2,..,n.\)
Multiplying both sides of (15) by \(x_{i}(t)\) and integrating over the interval \([0,\omega ]\), we get
From (H2), (8), (9), (10) and (11), it is clear to see that
From (16) and Cauchy–Schwarz inequality, we obtain:
Noticing that
where \(\varphi _{ij}^{-1}\) is the inverse function of \(\varphi _{ij}=t-\tau _{ij}(t),\,i,j=1,2,..,n\).
Then, for i=1,2,..,n, we obtain
which implies
where
Let \(\left\| x_{i}\right\| _{2}^{\omega }=\left( \intop _{0}^{\omega }x_{i}^{2}(t)dt\right) ^{2},\,x_{i}\in C\left( \mathbb {R},\mathbb {R}\right) ,\,i=1,2,..,n.\)
Thus
Since \(\left( I-S\right)\) is an M-matrix, assumption (H4) holds and Lemma 1, there exists a vector
and from (22), we have
Thus, we obtain
Obviously, we can see that there exists \(t_{i}\in \left[ 0,\omega \right]\) such that
Since for \(t_{i}\in \left[ 0,\omega \right]\),
thus we obtain
we can derive from (17) and (19) that
for each \(\,i=1,2,..,n.\) Then, it follows
One may readily verify that \(H_{i},\,i=1,2,..,n\) is independent of \(\lambda\). Again taking (H4) into account, we can get from Lemma 1, that there exists a vector \(\zeta =\left( \zeta _{1},\zeta _{2},\ldots ,\zeta _{n}\right) ^{T}>\left( 0,0,\ldots ,0\right) ^{T},\) such that \(\left( I-S\right) \zeta >\left( 0,0,\ldots ,0\right) ^{T}\). Hence, we can choose a sufficiently large constant \(\sigma\) such that
\(\zeta ^{*}=\left( \zeta _{1}^{*},\zeta _{2}^{*},\ldots ,\zeta _{n}^{*}\right) =\left( \sigma \zeta _{1},\sigma \zeta _{2},\ldots ,\sigma \zeta _{n}\right) ^{T}>\sigma \zeta ,\) and that
In order to finish our proof we will proceed in three steps:
Step1 let us take
Hence \(\Delta\) is an open bounded set of \(C_{\omega }\) and for any \(\lambda \in \left( 0,1\right)\), \(x\notin \partial \Delta\) . Thus, the condition (1) in Mawhin coincidence theorem is satisfied.
Step 2 we shall use contradiction to demonstrate the condition (2) in Lemma 2. Let us consider that there exists a solution \(u=\left( u_{1},u,\ldots ,u_{n}\right) ^{T}\in \partial \Delta \cap \mathbb {R}^{n}\) of the inclusion
Then u is a constant vector on \(\mathbb {R}^{n}\) such that \(|u_{i}|=\zeta _{i}\) for \(i\in \left( 1,2,..,n\right)\).
Therefore, we have for \(1<i\le n\)
or
where \(\gamma _{ij}(t)\in K[b_{ij}(u_{i})]\), \(\eta _{ij}(t)\in K[c_{ij}(u_{i})]\) and \(\nu _{ij}(t)\in K[p_{ij}(u_{i})]\). Then, there exists some \(t^{*}\in [0,\omega )\) such that
It follows
Therefore \((I-S)\zeta ^{*}\le \theta\), which contradicts the fact \((I-S)\zeta ^{*}>\theta\) and the condition 2 of Lemma 2 holds.
Step 3 In order to prove condition 3 let us define homotopic set-valued map
\(\phi :\Delta \cap \mathbb {R}^{n}\times \left[ 0,1\right] \rightarrow A_{\omega }\)
\((u,h)\longmapsto hdiag\left( -\bar{a}_{1},-\bar{a}_{2},\ldots ,-\bar{a}_{n}\right) u+\left( 1-h\right) g_{0}(u),\)
where
\(\bar{a}_{i}=\frac{1}{\omega }\intop _{0}^{\omega }a_{i}(t)dt,\,i=1,2,\ldots ,n.\)
if \(u=\left( u_{1},u_{2},\ldots ,u_{n}\right) ^{T}\in \partial \Delta \cap \mathbb {R}^{n}\) then u is a constant vector on \(\mathbb {R}^{n}\) such that \(|u_{i}|=\zeta _{i}^{*}\) for some \(i\in \left\{ 1,2,\ldots ,n\right\}\).
It follows that
Which implies that
If this is not true, then \(0\in \left( \phi \left( u,h\right) \right) _{i},\,i=1,2,\ldots ,n,\), i.e.,
Similarly, there exist \(\gamma _{ij}(t)\in K[b_{ij}(u_{i})]\), \(\eta _{ij}(t)\in K[c_{ij}(u_{i})]\) and \(\nu _{ij}(t)\in K[p_{ij}(u_{i})]\), \(i=1,2,\ldots ,n\) such that
consequently, there exists some \(t^{**}\in [0,\omega ]\) such that
We derive from (38) that
which yields that \((I-S)\zeta ^{*}\le \theta\), which contradicts \((I-S)\zeta ^{*}>\theta\). Thus, (30) holds. Which implies that \((0,0,\ldots ,0)^{T}\notin \phi (u,h)\) for any \(u=(u_{1},u_{2},\ldots ,u_{n})^{T}\partial \Delta \cap \mathbb {R}^{n},h\in [0,1]\). Thus, using the solution properties of the topological degree and the homotopy invariance, we have \(deg\left\{ g_{0},\Delta \cap \mathbb {R}^{n},0\right\} =deg\left\{ \phi \left( u,0\right) ,\triangle \cap \mathbb {R}^{n},0\right\} =deg\left\{ \phi \left( u,1\right) ,\triangle \cap \mathbb {R}^{n},0\right\} =deg\left\{ \left( -\bar{a}_{1}u_{1},-\bar{a}_{2}u_{2},\ldots ,-\bar{a}_{n}u_{n}\right) ^{T},\Delta \cap \mathbb {R}^{n},0\right\}\)
This means that \(\triangle\) satisfies all the conditions in Lemma 2, then the system (1) possesses at least one \(\omega -\)periodic solution.
The proof is finished. \(\square\)
Uniqueness and global exponential stability
Now, we will prove the uniqueness and global exponential stability of the \(\omega\)-periodic solution for the system (1). Mainly, when the system (1) is considered autonomous, we will find the sufficient conditions on the existence, uniqueness and global exponential stability of fixed point of the system.
Definition 6
(Stability) We denote \(x^{*}(t,\varphi )\) a periodic solution of the system (1). The periodic solution \(x^{*}(t,\psi )\) is said to be globally exponentially stable if for any solution \(x(t,\varphi )\) of the system (1), there are constants \(M\ge 1\) and \(\mu >0\) such that for any \(\varphi \in C_{\tau }\)
\(\left\| x(t,\varphi )-x^{*}(t,\psi )\right\| \le M\left\| \varphi -\psi \right\| _{C}e^{\mu t},\,t\ge 0.\)
Let us firstly introduce the following lemma.
Lemma 3
10 If \(f_{j}(\pm T_{j})=0\) , \(g_{j}(\pm T_{j})=0\) and \(h_{j}(\pm T_{j})=0\) \(\left( j=1,\ldots ,n\right)\) then for every \(x_{j},y_{j}\in \mathbb {R}\) we have
and
and
for \(i,j=1,2,\ldots ,n.\)
Lemma 4
43 Let \(x(t):[0,+\infty [\rightarrow \mathbb {R}^{n}\) an absolutely continuous on any compact interval of \([0,+\infty [\) and \(V(x):\mathbb {R}^{n}\rightarrow \mathbb {R}\) is Clarke’s regular, then x(t) and \(V(x):\mathbb {R}^{n}\rightarrow \mathbb {R}\) are differential for all \(t\in [0,+\infty [\). We get
where \(\partial V(x(t))\) is Clarke’s generalized gradient.
Next, we consider the assumption below.
(H5) \(I-S\) is an \(M-\)matrix, I is the identity matrix of size \(n,\,S=\left( s_{ij}\right) _{n\times n}\) and
\(s_{ij}=\frac{1}{a_{i}^{l}}\left( b_{ij}^{u}F_{j}+c_{ij}^{u}G_{j}+\frac{M}{\alpha }p_{ij}^{u}H_{j}\right) ,\,i,j=i,j=1,2,\ldots ,n.\)
Theorem 2
Suppose that \(f_{j}(\pm T_{j})=0,\) \(g_{j}(\pm T_{j})=0\)and \(h_{j}(\pm T_{j})=0\) for \(j=1,\ldots ,n\), and the assumption (H5) holds. If there exists periodic solution \(x^{*}(t,\psi )\) for system (1), then \(x^{*}(t,\psi )\) is a unique periodic solution of system (1) and is globally exponentially stable, and for any other solution \(x(t,\varphi )\) of system (1), there exist constants \(M,\,\mu >0\) such that
for any \(t>0.\)
Proof
Consider \(x(t)=(x_{1}(t),x_{2}(t),\ldots ,x_{n}(t))^{T}\) any solution of system (1) and \(x^{*}(t)=(x_{1}^{*}(t),x_{2}^{*}(t),\ldots ,x_{n}^{*}(t))^{T}\) is an \(\omega -\)periodic solution of system (1). We get:
\(\begin{array}{c} \frac{dx_{i}^{*}(t)}{dt}\in -a_{i}x_{i}^{*}(t)+\overset{n}{\underset{j=1}{\sum }}K[b_{ij}(x_{j}^{*}(t))]f_{j}\left( x_{j}^{*}(t)\right) +\overset{n}{\underset{j=1}{\sum }}K[c_{ij}(x_{j}^{*}(t-\tau _{j}(t)))]g_{j}\left( x_{j}\left( t-\tau _{j}(t)\right) \right) \\ +\overset{n}{\underset{j=1}{\sum }}K[p_{ij}(x_{j}^{*}(t))]\overset{t}{\underset{-\infty }{\int }}k_{ij}(t-s)h_{j}\left( x_{j}(s)\right) ds+J_{i}]. \end{array}\)
Assume that \(y_{i}(t)=x_{i}(t)-x^*_{i}(t)\), then
where \(B_{ij}(u,v)\), \(C_{ij}(u,v)\) and \(P_{ij}(u,v)\) are given as following
Similarly, there exist \(\gamma _{ij}(y_{j}(t))\in B_{ij}(y_{j}(t),x_{j}^{*}(t))\), \(\eta _{ij}(y_{j}(t-\tau _{ij}(t)))\in C_{ij}(y_{j}(t-\tau _{ij}(t)),x_{j}^{*}(t-\tau _{ij}(t)))\) and \(\nu _{ij}(y_{j}(t))\in P_{ij}(y_{j}(t),x_{j}^{*}(t))\) verify,
for every \(t\in [0,T),\) \(i=1,2,\ldots ,n\)
Taking (44) and Lemma 3 into account, we obtain
Obviously, basing on (H5), the matrix \(diag(a_{1}^{l},a_{1}^{l},\ldots ,a_{n}^{l})-(b_{ij}^{u}F_{j}+c_{ij}^{u}G_{j}+\frac{M}{\alpha }p_{ij}^{u}H_{j})_{n\times n}\) is also a nonsingular Mmatrix. In addition, there exists a positive \(\beta _{i}(i=1,2,\ldots ,n)\) such that
As a result, there exists a sufficiently small positive number \(\mu\) such that
We consider the Lyapunov function:
V(t) is differential for all \(t\ge 0\) because any solution x(t) of system (1) including the \(\omega\)-periodic solution \(x^{*}(t)\) are absolutely continuous.
The function \(|y_{i}(t)|\) is locally Lipschitz continuous in \(y_{i}\) on \(\mathbb {R}\). Hence, the Clarke’s generalized gradient of function \(|y_{i}(t)|\) at \(y_{i}(t)\) is
\(\partial (|y_{i}(t)|)=\bar{co}\left[ sign(y_{i}(t))\right] ={\left\{ \begin{array}{ll} -1 &{} if\,y_{i}(t)<0,\\ \left[ -1,1\right] &{} if\,y_{i}(t)=0,\\ -1 &{} if\,y_{i}(t)>0. \end{array}\right. }\)
For a given \(t\ge 0\), there exists a \(k\in \left\{ 1,\ldots ,n\right\}\) such that \(V(t)=\frac{e^{\mu t}|y_{k}(t)|}{\beta _{k}},\) and let \(v_{k}(t)=sign(y_{k}(t)\), if \(y_{k}(t)\ne 0\), while \(v_{k}(t)\) can be arbitrarily chosen in \([-1,1]\), if \(y_{k}(t)=0\). From Lemma 4 and system (44), it follows for all \(t\ge 0\) :
when \(V(t+s)\le V(t)\) for any \(s\in \left[ -\tau ,0\right]\). Let \(\bar{V}(t)=\underset{-\tau \le s\le 0}{sup}V(t+s),\) then we get
Therefore
for all \(i=1,\ldots ,n\). Thus, for any \(t>0\),
Moreover,
where \(R=\overset{n}{\underset{i=1}{\sum }}\beta _{i}/\beta _{min},\,x(t)=x(t,\varphi )\) and \(x^{*}(t)=x^{*}(t,\psi )\).
Hence, the \(\omega\)-periodic solution \(x^{*}(t)\) of system (1) is globally exponentially stable. Then, the periodic solution \(x^{*}(t)\) of system (1) is unique. The proof is complete. \(\square\)
Theorem 3
Consider that \(f_{j}(\pm T_{j})=0\), \(g_{j}(\pm T_{j})=0\) and \(h_{j}(\pm T_{j})=0\) \((j=1,\ldots ,n)\), and the assumption (H4) is satisfied. Then system (1) has a unique periodic solution \(x^{*}(t,\psi )\), and it is globally exponentially stable.
Next, we demonstrate the existence and global exponential stability of the equilibrium point for autonomous neural network model (1).
Let \(a_{i}^{l}=a_{i},\,b_{ij}^{u}=max\left\{ |\hat{b}_{ij}|,|\check{b}_{ij}|\right\} ,\) \(c_{ij}^{u}=max\left\{ |\hat{c}_{ij}|,|\check{c}_{ij}|\right\}\) \(p_{ij}^{u}=max\left\{ |\hat{p}_{ij}|,|\check{p}_{ij}|\right\}\) in the assumption (H4) and (H5) for system (1).
Firstly, for autonomous system (1), using Theorems 1 and 3 we can get the following result.
Corollary 1
Consider that \(f_{j}(\pm T_{j})=0\) and \(g_{j}(\pm T_{j})=0\), \(h_{j}(\pm T_{j})=0\) and \(\tau _{ij}(t)\equiv \tau _{ij}\), where \(\tau _{ij}\left( i,j=1,2,\ldots ,n\right)\) are all nonnegative constants. if (H5) is satisfied, then there exists a unique equilibrium point \(x^{*}\) for system (1), which is globally exponentially stable.
Proof
Clearly, system (1) is an \(\omega\)-periodic system, then, basing on Theorems 1 and 2, for any constant \(\omega >0\) system (1) possesses a unique \(\omega\)-periodic solution \(x^{*}(t)\) and it is globally exponentially stable.
Let \(x^{*}(t)\) be unique for all \(\omega >0\) , then we have \(x^{*}(t+\omega )=x^{*}(t)\) for any constants \(\omega >0\) and \(t\ge 0\). Hence \(x^{*}(t)\equiv x^{*}\) for all \(t\ge 0\).
Thus \(x^{*}=x^{*}(0)\) is an equilibrium point of system (1) and \(x^{*}\) is unique and globally exponentially stable.
Theorem 4
Consider that \(f_{j}(\pm T_{j})=0\) and \(g_{j}(\pm T_{j})=0\left( j=1,2,\ldots ,n\right)\). Since (H5) holds, there exists an uniqueness equilibrium point \(x^{*}\) for system (1), which is globally exponentially stable.
From the assumption (H5), there exist positive constants \(\beta _{i}\left( i=1,2,\ldots ,n\right)\) such that
\(\beta _{i}a_{i}^{l}-\overset{n}{\underset{j=1}{\sum }}\beta _{j}\left( b_{ij}^{u}F_{j}+c_{ij}^{u}G_{j}+\frac{M}{\alpha }p_{ij}^{u}H_{j}\right) >0,i=1,\ldots ,n.\)
After that, let a set-valued map \(\Gamma (u)=\left( \Gamma _{1}(u),\Gamma _{1}(u),\ldots ,\Gamma _{n}(u)\right) ^{T}\), and
for \(i=1,2,\ldots ,n,\) where \(u=\left( u_{1},\ldots ,u_{n}\right) ^{T}\) .
Using Lemma 3, for any two vectors \(u=(u_{1},\ldots ,u_{n})^{T}\in \mathbb {R}^{n}\) and \(v=(v_{1},\ldots ,v_{n})^{T}\in \mathbb {R}^{n}\), we have
for \(i=1,2,\ldots ,n,\) then,
where
and \(0<\sigma <1\). Thus, the map \(\Gamma :\mathbb {R}^{n}\rightarrow \mathbb {R}^{n}\) is a contraction mapping on \(\mathbb {R}^{n}\). It follows that, there is a unique fixed point \(u^{*}\in \mathbb {R}^{n}\) such that \(u^{*}\in \Gamma (u^{*})\), i.e.,
for \(i=1,\ldots ,n\). Let \(x_{j}^{*}=\frac{u_{j}^{*}}{\beta _{j}a_{i}}\) for \(i=1,\ldots ,n\), then
where \(i=1,\ldots ,n\), and u is unique, we obtain that system (1) has a unique equilibrium \(x^{*}\).
Thus, following the proof of Theorem 1, we prove easily that equilibrium \(x^{*}\) of system (1) is globally exponentially stable.
Finite-time periodic synchronization
In this section, we will examine the finite-time synchronization problem of delayed memristive neural networks.
For this purpose, we consider the delayed memristive neural network model (1) as the drive system, and a controlled response system is modeled by the following functional differential equation:
where \(y_{i}(t)\) is the controller to be designed.
Definition 7
The memristive neural network (1) is said to be completely synchronized onto (53) in finite time if by designing a suitable controller \(v_{i}(t)\) to system (53), there exists a constant \(t_{1}\)>0 (\(t_{1}\) depends on the initial value), satisfying
We take \(e_{i}(t)=x_{i}(t)-y_{i}(t)\) the error term. Then, one can obtain the following result.
Theorem 5
We consider that then system (1) exists at least one w-periodic solution. If there exists a positive definite matrix S satisfying
where \(F=diag(F_{1},F_{2},\ldots F_{n})\), \(G=diag(G_{1},G_{2},\ldots G_{n})\), \(H=diag(H_{1},H_{2},\ldots H_{n})\), \(\underline{B}=diag(\underline{b}_{1},\underline{b}_{2},\ldots \underline{b}_{n})\), \(\overline{B}=diag(\overline{b}_{1},\overline{b}_{2},\ldots \overline{b}_{n})\), \(\underline{C}=diag(\underline{c}_{1},\underline{c}_{2},\ldots \underline{c}_{n})\), \(\overline{C}=diag(\overline{c}_{1},\overline{c}_{2},\ldots \overline{c}_{n})\), then system (53) can synchronize onto system (1) in a finite time \(t_{1}=\frac{\sqrt{2}}{k}V^{\frac{1}{2}}\left( 0\right)\) and to adapt to changes in the process that occur with time, we define the adaptive controller
and adaptive updated law, where
and
\(\varepsilon _{i}>0\) is a constant, \(k>0\) is a tunable constant,
\(\iota _{i}>0,i=1,2,\ldots ,n\), are the control parameters to be determined and satisfies:
Proof
Set \(\Lambda =diag\left\{ o_{1}(t),o_{2}(t),\ldots o_{n}(t)\right\}\). Consider the following Lyapunov functional:
The master model (1) and the slave model (53) are state-dependent switching systems, hence, we can divide the error system into the following four cases at time t.
Case 1 If \(|x_{i}(t)|>T_{i}\), \(|y_{i}(t)|\ge T_{i,}\) at time t, then the master system (1) and the slave system (53) decrease respectively, to the following models:
and
Correspondingly, the error system can be written as
Let us denote \(f_{j}(e_{j}(t))=f_{j}(x_{j}(t))-f_{j}(y_{j}(t))\); \(g_{j}(e_{j}(t-\tau ))=g_{j}(x_{j}(t-\tau ))-g_{j}(y_{j}(t-\tau ))\) and \(h_{j}(e_{j}(t))=h_{j}(x_{j}(t))-h_{j}(y_{j}(t))\). Under assumption (H2), evaluating the derivation of V(t) along the trajectory of error system gives
Using previous results, we obtain
By Lemma 1, one has
\(\begin{array}{c} \dot{V}(t)\le \begin{array}{c} -\sqrt{2}k\left[ \frac{1}{2}e^{T}(t)e(t)+\frac{1}{2}\int _{t-\tau }^{t}e^{T}(s)Se(s)ds+\frac{1}{2}\overset{n}{\underset{i=1}{\sum }}\frac{1}{\varepsilon _{i}}o_{i}^{2}(t)\right] ^{\frac{1}{2}}\end{array} =-\sqrt{2}kV^{\frac{1}{2}}(t). \end{array}\)
Case 2 Let \(|x_{i}(t)|>T_{i}\) ,\(|y_{i}(t)|>T_{i}\) at time t, then the master system (1) and the slave system (53) decrease to the following systems:
and
Hence, we obtain the following error system
Similarly, we write
According to Lemmas 1, it follows
\(\begin{array}{c} \dot{V}(t)\le \begin{array}{c} -\sqrt{2}k\left[ \frac{1}{2}e^{T}(t)e(t)+\frac{1}{2}\int _{t-\tau }^{t}e^{T}(s)Se(s)ds+\frac{1}{2}\overset{n}{\underset{i=1}{\sum }}\frac{1}{\varepsilon _{i}}o_{i}^{2}(t)\right] ^{\frac{1}{2}}\end{array}\\ =-\sqrt{2}kV^{\frac{1}{2}}(t). \end{array}\)
Case 3 If \(|x_{i}(t)|>Ti\) , \(|y_{i}(t)|\le T_{i}\) at time t, then the master system (1) and the slave system (53) reduce to (60) and (61). Correspondingly, the error system can be written as
evaluating the derivation of V(t) along the trajectory of (68), we have
In consideration of the definition \(l_{i}\) and \(Z_{2}\), one has \(\begin{array}{c} \dot{V}_{i}(t)\le -\sqrt{2}kV^{\frac{1}{2}}(t).\end{array}\)
Case 4. Let \(|x_{i}(t) |\le T_{i}\) , \(|y_{i}(t)|>T_{i}\) at time t, then the master system (1) and the slave system (53) reduce to (60) and (62). Then, we obtain the following error system:
Consider \(|x_{i}(t)|\le T_{i}\) , we obtain
Or \(V(t)=0\) for \(t\ge t_{1}\) with \(t_{1}=\frac{\sqrt{2}}{k}V^{\frac{1}{2}}(0)\) , hence \(e_{i}(t)=0\) for \(t\ge t_{1}\), \(i=1,2,\ldots ,n\). According to definition 5, the salve system (53) is finite-timely synchronized onto the master system (1) under the designed controller (54). This completes the proof. \(\square\)
Numerical example
In this section, numerical example is given to show the effectiveness of our results. We consider the two-dimensional mermristor-based recurrent neural networks described by the following system:
where \(i=1,22\), \(a_{1}=[3\,4]\), \(\tau _{ij}(t)=\frac{1}{5}cos(t)\) and for all \(x\in \mathbb {R}\)

The state trajectories of \(x_{1}(t)\).

The state trajectories of \(x_{2}(t)\).
We easily calculate
\(I-S=\left( \begin{array}{cc} 0.49 &{} 0.84\\ 0.65 &{} 0.07 \end{array}\right)\). Thus, the conditions required in Theorem 1 are satisfied. When I (t) is a periodic function, in the view of Theorem 1, this neural network has at least one periodic solution. It is clear that \(I-S\) is an M-matrix. Then theorem 4 holds and the system has a unique equilibrium point \(x^{*}\), which is globally exponentially stable.
After simulation of these two systems using matlab Toobox,we obtain the graphical illustration Figs. 2 and 3 shows the periodic dynamic behaviors of the output of the two neurons which are in accordance with theoretical results.
To prove the effectiveness of our result on finite-time synchronization we consider the master system the above simulated example and the following system is the slave.
Let consider the following response RNN:
\(\begin{array}{c} \dot{y}_{i}(t)=-a_{i}x_{i}(t)+\overset{2}{\underset{j=1}{\sum }}b_{ij}f_{j}(y_{j}(t))+\overset{2}{\underset{j=1}{\sum }}c_{ij}g_{j}(y_{j}(t-\tau _{j})) +\overset{2}{\underset{j=1}{\sum }}p_{ij}(t)\overset{t}{\underset{-\infty }{\int }}k_{ij}(t-s)h_{j}(y_{j}(s))ds+u_{i}(t). \end{array}\)
We choose n=2 neurons and \(u_{i}(t)=exp(-0.5 \times t)\) and the initial states \(x=[0.5;0.2];y=[0.7;0.3];\)
We obtain in the following the simulation results: the two neurons tend to have the same trajectories in Figs. 4 and 5. Figs. 6 and 7 describes the time responses of finite-time synchronization errors and the trajectory turns to zero quickly as time goes and \(t_{1}= 4.4\) and \(t_{2}=2.9\).

Time-domain behavior of the state variables x1(t) and y1(t).

Time-domain behavior of the state variables x2(t) and y2(t).

Phase plane behavior of the master system and the slave system.

Finite-Time synchronization error.
Conclusions
In this paper, we study a memristive recurrent neural networs by giving assumptions for the existence and uniqueness of periodic solution. In addition, we detemine sufficient conditions that ensure the global exponential stability of this solution. Further more, we garantee the finite-synchronization problem of delayed memristive by determining several assymptions.
Meanwhile, the theoretical proposed model can be tested in practical issues like brain computing interface, image processing, pattern recognition and intelligent control. In our ongoing future works, the proposed neural network model will be adjusted to analyze the electroencephalography (EEG) data for implementing continuous vigilance estimation using EEG signals acquired by wearable dry electrodes in both simulated and real driving environments. Also, MNN synchronization and EEG signals can be combined to study the brain dynamics at rest following a perturbation.
Data availability
The data that support the findings of this study are available from author Hajer Brahmi but restrictions apply to the availability of these data, which were used under license for the current study, and so are not publicly available. Data are however available from the authors upon reasonable request and with permission of the author Hajer Brahmi.
References
Yu, Y., Si, X., Hu, C. & Zhang, J. A review of recurrent neural networks: Lstm cells and network architectures. Neural Comput. 31, 1235–1270 (2019).
Yan, B., He, S. & Sun, K. Design of a network permutation entropy and its applications for chaotic time series and eeg signals. Entropy 21, 849 (2019).
Fourati, R., Ammar, B., Sanchez-Medina, J. & Alimi, A. M. Unsupervised learning in reservoir computing for eeg-based emotion recognition. IEEE Trans. Affect. Comput. 13, 2 (2020).
Liu, P.-L. Delay-dependent robust stability analysis for recurrent neural networks with time-varying delay. Int. J. Innov. Comput. Inf. Control 9, 3341–3355 (2013).
Chen, R. T., Rubanova, Y., Bettencourt, J. & Duvenaud, D. K. Neural ordinary differential equations. Adv. Neural Inf. Process. Syst. 31, 1 (2018).
Ammar, B., Chérif, F. & Alimi, A. M. Existence and uniqueness of pseudo almost-periodic solutions of recurrent neural networks with time-varying coefficients and mixed delays. IEEE Trans. Neural Netw. Learn. Syst. 23, 109–118 (2011).
Abdelaziz, M. & Chérif, F. Stability analysis of delayed fuzzy Cohen–Grossberg neural networks with discontinuous activations. Int. J. Adapt. Control Signal Process. 34, 1120–1134 (2020).
Selverston, A. I. & Ayers, J. Oscillations and oscillatory behavior in small neural circuits. Biol. Cybern. 95, 537–554 (2006).
Brahmi, H., Ammar, B., Chérif, F. & Alimi, A. M. Stability and exponential synchronization of high-order hopfield neural networks with mixed delays. Cybern. Syst. 48, 49–69 (2017).
Chen, J., Zeng, Z. & Jiang, P. On the periodic dynamics of memristor-based neural networks with time-varying delays. Inf. Sci. 279, 358–373 (2014).
Cherif, F. Analysis of global asymptotic stability and pseudo almost periodic solution of a class of chaotic neural networks. Math. Model. Anal. 18, 489–504 (2013).
Ammar, B., Brahmi, H. & Chérif, F. On the weighted pseudo-almost periodic solution for bam networks with delays. Neural Process. Lett. 48, 849–862 (2018).
Ziyin, L., Hartwig, T. & Ueda, M. Neural networks fail to learn periodic functions and how to fix it. Adv. Neural. Inf. Process. Syst. 33, 1583–1594 (2020).
Brahmi, H. & Ammar, B. Deep learning and intelligent robots in government. In Handbook of Research on Applied Artificial Intelligence and Robotics for Government Processes (eds Valle-Cruz, D. et al.) 1–34 (IGI Global, 2023).
Zhang, A., Qiu, J. & She, J. Existence and global exponential stability of periodic solution for high-order discrete-time bam neural networks. Neural Netw. 50, 98–109 (2014).
Abbas, A., Bassil, Y. & Keilholz, S. Quasi-periodic patterns of brain activity in individuals with attention-deficit/hyperactivity disorder. NeuroImage Clin. 21, 101653 (2019).
Li, Q., Lin, T. & Shen, Z. Deep learning via dynamical systems: An approximation perspective. J. Eur. Math. Soc. 1, 1 (2022).
Kendall, J. D. & Kumar, S. The building blocks of a brain-inspired computer. Appl. Phys. Rev. 7, 011305 (2020).
Yang, H., Zhang, J., Li, S., Lei, J. & Chen, S. Attend it again: Recurrent attention convolutional neural network for action recognition. Appl. Sci. 8, 383 (2018).
Castelo-Branco, M., Neuenschwander, S. & Singer, W. Synchronization of visual responses between the cortex, lateral geniculate nucleus, and retina in the anesthetized cat. J. Neurosci. 18, 6395–6410 (1998).
Kleinbub, J. R., Talia, A. & Palmieri, A. Physiological synchronization in the clinical process: A research primer. J. Couns. Psychol. 67, 420 (2020).
Wang, H., Liu, S. & Wu, X. Synchronization analysis of fractional delayed memristive neural networks via event-based hybrid impulsive controllers. Neurocomputing 528, 75 (2023).
Hamad, A. A., Al-Obeidi, A. S., Al-Taiy, E. H., Khalaf, O. I. & Le, D. Synchronization phenomena investigation of a new nonlinear dynamical system 4d by Gardano’s and Iyapunov’s methods. Comput. Mater. Continua 66, 3311–3327 (2021).
Abdelaziz, M. & Chérif, F. The synchronization and stability analysis of delayed fuzzy Cohen–Grossberg neural networks via nonlinear measure method. J. Exp. Theor. Artif. Intell. 34, 215–234 (2022).
Abdelaziz, M. & Chérif, F. Exponential lag synchronization and global dissipativity for delayed fuzzy Cohen–Grossberg neural networks with discontinuous activations. Neural Process. Lett. 51, 1653–1676 (2020).
Strukov, D. B., Snider, G. S., Stewart, D. R. & Williams, R. S. The missing memristor found. Nature 453, 80–83 (2008).
Adamatzky, A. & Chua, L. Memristor Networks (2013).
Chua, L. Memristor-the missing circuit element. IEEE Trans. Circuit Theory 18, 507–519 (1971).
Yang, C., Zhong, K., Zhu, S. & Shen, Y. Algebraic Conditions for Synchronization Stability of Memristive Neural Networks 5055–5058 (2014).
Jo, S. H. et al. Nanoscale memristor device as synapse in neuromorphic systems. Nano Lett. 10, 1297–1301 (2010).
He, S., Zhan, D., Wang, H., Sun, K. & Peng, Y. Discrete memristor and discrete memristive systems. Entropy 24, 786 (2022).
Wu, A. & Zeng, Z. Exponential stabilization of memristive neural networks with time delays. IEEE Trans. Neural Netw. Learn. Syst. 23, 1919–1929 (2012).
Kozma, R., Pino, R. E. & Pazienza, G. E. Advances in Neuromorphic Memristor Science and Applications Vol. 4 (Springer, 2012).
Guo, Z., Yang, S. & Wang, J. Global exponential synchronization of multiple memristive neural networks with time delay via nonlinear coupling. IEEE Trans. Neural Netw. Learn. Syst. 26, 1300–1311 (2014).
Xu, C. & Li, P. Periodic dynamics for memristor-based bidirectional associative memory neural networks with leakage delays and time-varying delays. Int. J. Control Autom. Syst. 16, 535–549 (2018).
Wu, H., Li, R., Zhang, X. & Yao, R. Adaptive finite-time complete periodic synchronization of memristive neural networks with time delays. Neural Process. Lett. 42, 563–583 (2015).
Filippov, A. F. Differential Equations with Discontinuous Righthand Sides: Control Systems, Vol. 18 (2013).
Higham, N. J. Stable iterations for the matrix square root. Numer. Algorithms 15, 227–242 (1997).
Ray, M. B. Monotone Iterative Techniques for the Numerical Solution of Nonlinear Neumann Problems (1981).
Hiriart-Urruty, J.-B. & Lewis, A. S. The Clarke and Michel–Penot subdifferentials of the eigenvalues of a symmetric matrix. Comput. Optim. Appl. 13, 13–23 (1999).
Clarke, F. H. Generalized gradients and applications. Trans. Am. Math. Soc. 205, 247–262 (1975).
Gaines, R. E. & Mawhin, J. L. Coincidence Degree and Nonlinear Differential Equations Vol. 568 (Springer, 2006).
Clarke, F. H. Generalized gradients of lipschitz functionals. Adv. Math. 40, 52–67 (1981).
Acknowledgements
This work was supported by the Princess Nourah bint Abdulrahman University Researchers project number (PNURSP2023R387), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.It has been, also, funded by the Ministry of Higher Education and Scientific Research of Tunisia under Grant Agreement number LR11ES48.
Author information
Authors and Affiliations
Contributions
H.B.: Conceptualization, Methodology, Writing—original draft, Writing prepared Figs. 1, 4 and 5 and editing. B.A. and A.K.: Writing—prepared Figs. 2 and 3 review and editing, Methodology. F.C.: Validation, Editing. G.A. and A.M.A.: Validation, Conceptualization, Supervision. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Brahmi, H., Ammar, B., Ksibi, A. et al. Finite-time complete periodic synchronization of memristive neural networks with mixed delays. Sci Rep 13, 12545 (2023). https://doi.org/10.1038/s41598-023-37737-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-37737-2
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
