
Abstract
The ever-increasing demand for artificial intelligence (AI) systems is underlining a significant requirement for new, AI-optimised hardware. Neuromorphic (brain-like) processors are one highly-promising solution, with photonic-enabled realizations receiving increasing attention. Among these, approaches based upon vertical cavity surface emitting lasers (VCSELs) are attracting interest given their favourable attributes and mature technology. Here, we demonstrate a hardware-friendly neuromorphic photonic spike processor, using a single VCSEL, for all-optical image edge-feature detection. This exploits the ability of a VCSEL-based photonic neuron to integrate temporally-encoded pixel data at high speed; and fire fast (100 ps-long) optical spikes upon detecting desired image features. Furthermore, the photonic system is combined with a software-implemented spiking neural network yielding a full platform for complex image classification tasks. This work therefore highlights the potential of VCSEL-based platforms for novel, ultrafast, all-optical neuromorphic processors interfacing with current computation and communication systems for use in future light-enabled AI and computer vision functionalities.
Similar content being viewed by others


Introduction
A direct result of the vast uptake of internet-connected devices is the growing availability of data and the increasing demand for faster, more efficient data processing platforms. Electronic processing technologies have grown to alleviate some of this demand1,2,3, demonstrating high computational throughput and enabling the development of novel systems for artificial intelligence (AI)4. However, less traditional computing approaches, such as those based on neuromorphic (brain-inspired) processing elements, have also risen in popularity5,6. These systems, that have thrived in electronics, have demonstrated highly parallel architectures and impressive decision-making capability. Nevertheless, like their more traditional processing counterparts, the performance increment of silicon-based platforms is becoming increasingly limited due to fundamental physical challenges in electronic technologies7. Crosstalk, parasitic capacitance, and Joule-heating each contribute to the limitation of the speed, bandwidth, footprint, and efficiency of electronic systems, in turn driving many researchers to investigate alternative platforms for future data processing systems.
One such alternative platform is photonics. Photonic light-based systems boast features such as increased bandwidth, high energy efficiency, low cross talk and fast operation speeds, helping remedy some of the limitations posed to advancing electronics. Recently, investigations into photonic Artificial Neural Networks (ANNs) and neuromorphic systems have been on the rise. Optical devices, such as quantum resonant tunnelling (QRT) structures8,9,10, optical modulators11, phase-change materials (PCMs)12 and semiconductor lasers (SLs)13,14,15,16,17, to name a few, have all been investigated as candidates for novel neuromorphic photonic processing systems. Yet with the field still in its infancy, some investigations have already flourished into efforts to accelerate information processing in photonics with ANNs18,19,20, and reservoir computing systems21,22. Similarly, Convolutional Neural Networks (CNNs), which have shown great success in the fields of image processing and computer vision, are also seeing implementation on photonic platforms. Devices such as PCMs23, micro-ring weighting banks24 and modulators25 have been proposed to improve the speed and efficiency of the computationally expensive convolution operations.
Like in classical ANNs, there are a number of processing tasks to which neuromorphic computing systems are particularly applicable, one being the classification and recognition of images and patterns. Software implemented neuromorphic Spiking Neural Networks (SNNs), similarly to CNNs, have demonstrated successful image processing functionalities. Such SNN systems have applied combinations of convolution and pooling techniques to extract image features27, and have been used in conjunction with dynamic vision sensor (DVS) cameras28 and single photon avalanche detectors (SPADs)29 to perform image processing tasks. Further, reports have also shown that SNNs have lower energy operational requirements and produce lower latency than CNNs, due to only the active parts of the network requiring computation30. Therefore, SNNs made up of neuromorphic photonic devices (as reported theoretically in31), exhibit great potentials for the future development of fast and efficient image processing systems built directly on optical platforms.
Alongside these efforts, SLs have shown the ability to operate as high-speed artificial optical spiking neurons, emulating the functionality and spiking operation of biological neurons in the brain (see26 and references therein for a review). Among SLs, vertical cavity surface emitting lasers (VCSELs) have attracted considerable attention given their unique attributes (e.g. high speed, ease to integrate in 2D arrays, low energy operation, high coupling efficiency to optical fibres, etc.). A number of neuronal functionalities have been recently demonstrated in VCSELs, including ultrafast spike activation and inhibition32, networked spiking communication33, spike rate encoding34 and pattern recognition35, to name a few. Furthermore, theoretical spin flip model (SFM) studies36 indicate that VCSELs have the potential to present a pathway to unsupervised learning, via the neuron-inspired spike-timing dependent plasticity (STDP) technique. Also very recently, the authors have outlined the potentials of VCSEL neurons for image processing37,38 and encoding functionalities39. However, in these early image processing reports, the VCSEL neurons acted as spike thresholding elements, requiring the image pixel information to be pre-processed offline.
This work overcomes this key challenge, demonstrating a photonic VCSEL-based hardware system and all-optical spiking convolutional operation for image processing functionalities. The proposed platform uses a single VCSEL acting as an artificial optical spiking neuron, in combination with time-division multiplexing to allow for an extremely hardware friendly platform. The integrate-and-fire capability of the spiking VCSEL neuron is exploited to simultaneously process multiple high-speed optical inputs (100 ps-long), each encoding distinct image pixels to deliver spiking convolutional operation directly in the optical domain. This feature is used in this work to demonstrate all-optical edge-feature detection in (complex) source images at very high speed and with noise robust operation. We demonstrate successful edge feature detection for a variety of source images, including complex images (e.g. the logo of our Institute) as well as type-written and hand-written digits (5000 images from the MNIST database). Moreover, we show that the optical spiking outputs from the VCSEL-based neuromorphic photonic hardware system can be fed to software implemented SNNs to demonstrate successful hand-written digit image recognition. Additionally, our approach uses inexpensive and commercially-sourced VCSELs working at the key telecom wavelength of 1300 nm, hence permitting full compatibility with optical communication networks and data centre technologies.
Results
Spiking image edge detection with a VCSEL neuron
In this work, we utilize the neuromorphic functionalities of VCSELs, in tandem with convolution, to perform image processing tasks. Specifically, we will tap into the input integration functionality of the VCSEL neuron that allows the device to temporally summate the energy contribution of multiple fast (100 ps-long) input pulses occurring in quick succession35. Known in biological neuronal model as integration, this key processing functionality permits neurons to receive multiple input signals (through dendrite receptors) from different neurons in a network, integrate their combined intensity (in the neuron’s body or soma) and fire spiking responses (once the threshold for spike firing is exceeded) that are communicated to neighbouring neurons (via its axon). Here, we capitalise on the optical integration capability of our VCSEL neuron, alongside its ability to threshold inputs and activate fast sub-ns spiking responses, to develop a novel optical approach to image edge detection37.
In this new technique, image edge feature detection is performed according to the depiction illustrated in Fig. 1 (see “Methods” section and supplementary information for full details). Figure 2 shows experimental results on the edge-detection of a printed “Digit 4” 32 × 32 pixel source image. Here, eight different (2 × 2) kernel operators are run sequentially. These kernels apply integer weights, 1 for black and −1 for white, to the image’s pixel data. As 2 × 2 kernels are used here to process each pixel, four input values are required. These are encoded using four time-multiplexed 100 ps pulses. A total time of 3 ns per pixel was selected in the experiments and all pixel information is serialised before its injection into the VCSEL neuron.

Image processing technique with a spiking VCSEL neuron. Diagrams of a biological (a) and an artificial optical VCSEL neuron (b), illustrating the integration of multiple inputs and spike firing upon a threshold-exceeding input. Schematic of the image convolution and input generation process (c). Source images are converted into binary matrices, 1’s (black) and −1’s (white) and operated on by a 2 × 2 kernel operator creating a Hadamard (elementwise) product. The product is used for the generation of a return-to-zero (RZ) image input, where each pixel is given a configurable duration. The kernel operator is scanned across the image, time-multiplexing the inputs generated for each pixel. Experimental setup (d). The image input data is generated by an arbitrary waveform generator (AWG) and encoded, using a Mach Zehnder intensity modulator (MZ), into the light of a tuneable laser (TL). The injection light from the TL is directed into the VCSEL neuron using fibre-optic components; these include optical isolators (ISO), variable optical attenuators (VOA), polarisation controllers (PCs) and circulators (CIRC). The VCSEL neuron’s response is analysed with a fast real time oscilloscope (OSC) after detection with a photodiode (PD).

Spike edge-feature detection of a black-and-white image with a VCSEL neuron. The 32 × 32 pixel source image (a) and reconstructed image (b) of a printed “Digit 4” after it’s operated on by eight different 2 × 2 kernels. Plots (c)–(j) depict individual results achieved for each of the 8 2 × 2 kernel operators utilised. These are shown in the insets below plots (c–j) and are respectively: two vertical (c,d), two horizontal (e,f), and four diagonal (g–j) kernel operators. Each black dot in plots (b–j) corresponds to a 100 ps-long long spike fired by the VCSEL neuron upon recognising a specific feature in the source image. The final 8 kernel reconstruction reveals all edges in the image.
First, two ‘vertical’ 2 × 2 kernels are applied to the source image triggering different spiking responses from the VCSEL neuron. These are captured using a real time oscilloscope and analysed using temporal maps, which de-multiplex the captured timeseries to form reconstructed images. See supplementary information for example input and output results outlining the operation principle and methods utilised in this work. Next, 3.0 ns segments (the configured pixel window) are sampled from the temporal maps to reveal which pixel inputs had activated spiking responses. A black pixel is plotted in a final image reconstruction when a spike activation (target feature) is detected. The convolution results for both vertical kernels are shown in final reconstruction of Figs. 2c,d, revealing that the vertical edges of the “Digit 4” are identified by the VCSEL neuron (firing 100 ps-long spikes). To achieve this result, the ‘vertical’ kernels yield bursts of four negative input pulses when a vertical edge feature is found in the image, and smaller input pulse bursts for all other pixel features (see supplementary information). The VCSEL neuron integrates the combined energy of these time-multiplexed bursts, only firing a spike when all four pulses are negative (the total energy goes beyond the spike firing threshold) to detect a vertical edge in the image. For all other cases, the VCSEL neuron remains quiescent as the combined energy of the encoded input burst does not exceed the spike activation threshold.
In Fig. 2e,f, we apply 2 × 2 ‘horizontal’ kernel operators to detect the horizontal edge-features in the printed ‘Digit 4’ image. The ‘horizontal’ kernels again apply integer weights to the source image pixel data. The VCSEL neuron correctly reveals all horizontal features present in the image with the firing of fast sub-ns spikes. Additional kernel operators are applied to reveal the diagonal edges of the image. These are set with the following non-integer weights: 0.5, 0.75, 0.75 and -1 and the three rotations. The results of the diagonal integrate-and-fire convolutions are shown in Fig. 2g–j, revealing successful detection of all diagonal features (Fig. 2g,h) as well as corner-features (Fig. 2i,j). Combining all eight experimental runs, we can form a single (8-kernel) reconstruction of the image revealing all edge information, as shown in Fig. 2b. The technique presented here uses a single spiking VCSEL neuron combined with time-multiplexing and is therefore capable of providing all-optical edge detection functionality.
To further test the capability of our system we selected a source image of higher complexity, namely a 323 × 323 pixel RGB image of the University of Strathclyde’s (UoS’s) crest (Fig. 3a). This higher resolution image had three colour channels, red, green and blue. In this demonstration the green channel was selected before conversion into binarized black and white (Fig. 3b). We then used the same process and the same 8 kernel operators as in Fig. 2, to detect and reveal the image’s edge features through the sub-ns spiking of the VCSEL neuron. The spiking time-series obtained with the eight different 2 × 2 kernel operators are combined into the reconstructed image plotted in Fig. 3c. The latter shows that all horizontal, vertical and diagonal lines were recognised; hence illustrating that neither image size nor complexity impede the operation of the photonic spiking VCSEL-based edge detection system. Importantly, an overall edge detection accuracy of 96.63% was achieved. A configurable pixel duration equal to 3.0 ns was set in all cases analysed in Figs. 2 and 3. Hence, our approach permits ultrafast image processing. For example, the time required to process the large 322 × 322 pixel UoS’ crest image of Fig. 3 was equal to 3.0 ns × 322 × 322 = 311.1 µs per kernel operator. Importantly, we must note that the time-per-pixel could be still further reduced to values of just 1 ns (the spike refractory time of the VCSEL neuron), without any additional optimisation process, to achieve faster processing times.

Experimental edge detection of a complex, large size image with the VCSEL neuron. The 323 × 323 University of Strathclyde (UoS) crest source image (a) and its green (G-) colour channel component (b). The image is sequentially operated on by 8 2 × 2 kernels producing the reconstruction with all edge-features detected (c).
Influence of source image noise
The performance of the edge-feature detecting VCSEL neuron system is next tested with ‘noisy’ images (see Fig. 4). Noise is implemented into the “Digit 4” source image via percentage variations of global pixel intensity. The same 8 2 × 2 kernel operators as in Figs. 2 and 3, are sequentially applied to the input image, to perform edge detection in a single experimental run. The performance of the system is measured by counting the number of successful detections. Figure 4 reveals noise robust operation for the spiking VCSEL neuron system of this work, including successful operation under increasing levels of global pixel noise.

Influence of source image noise on the edge-detection performance of the VCSEL neuron system. Noise is introduced to the printed “Digit 4” source image via the random variation of global pixel intensity (a,b). Global pixel intensity is varied randomly up to 20%.
The results for globally increasing pixel noise are shown in Fig. 4a,b. Initially, when no noise is added, the system responds revealing all edge-features in the image. Increasing the global noise to 5% and 10%, does not significantly affect performance, creating just 11% and 20.1% less successful activations for edge features. Increasing the global noise further to 15% causes the number of detections to drop overall (52.2% less activations). Finally, increasing image noise to 20% removes almost all feature detection (76.1% less activations) as now varying pixel intensities fail to match the kernel operator, creating input bursts incapable of spike activation.
These results demonstrate that source image can be influenced by a global pixel intensity variation of up to 15% before kernel operators (configured for noiseless images) struggle to identify target features. Additional results, where intensity variations are introduced to the background of the printed “Digit 4” image are presented in the supplementary information. The intrinsic noise of the laser is not measured in this work because the spike-based system operates with all-or-nothing responses. Noise-robust operation is a characteristic benefit of spike-based systems and is akin to the high contrast between the on or off response and laser noise. Our spike-based systems is therefore resilient to intrinsic laser noise but still subject to noise in source images as this directly creates noise in the system inputs. Emphasis was made during our experimentation to work with stable injection parameters and a stable system temperature, to maintain a high spiking consistency for each convolution operation.
MNIST handwritten digit edge detection & classification
We proceed now to test our system with a large number of images from the MNIST handwritten digit database40. A total of 500 28 × 28 pixel images of each digit (0–9) are tested, with each image subject to convolution by 6 symmetrical 2 × 2 kernel operators. Time division multiplexing is used to sequentially perform each kernel operation on all 5000 images. An example of a source MNIST image and the resulting reconstructed image after convolution with 6 2 × 2 kernels are shown in Fig. 5a,b. Experimental results for some selected examples of different digit images from the MNIST database are also provided in Fig. 5c.

MNIST handwritten-digit edge detection with an integrate-and-fire VCSEL neuron. Six 2 × 2 symmetrical kernels (2 vertical, 2 horizontal, 2 diagonal) we applied to 500 images of each digit from the MNIST dataset. All kernels are sequentially applied to the source image (a) which, when analysed and combined, produce reconstructions (b) that reveal all edge information. Each set of MNIST digits (c) were processed separately.
These results show that symmetrical kernel operators and binary weights produce integrating bursts that successfully activate spike firing events, detecting edge-features for all 500 consecutive images (processed in a single experimental run) for each of the 10 digits.
The single VCSEL neuron system completes a run of 500 MNIST hand-written digit images in just 6.56 ms (3 ns × 27 × 27 × 6 kernels × 500 images). This high-speed operation of 13.12 µs per MNIST image, already permitting processing > 76,000 images per second, could still be significantly improved without any additional optimisation stage, just by reducing the pixel duration from its current set value of 3 ns to levels closer to the spiking refractory period of the VCSEL neuron (equal to approx. 1 ns for our commercially-sourced devices34); this would allow for a direct improvement of processing speed by a factor of 3. However, it should be noted that the spiking refractory period of the VCSEL neuron could be even further reduced (to sub-ns levels) with bespoke device designs permitting higher spiking rates. Similarly, the work reported here demonstrates an extremely hardware-friendly system using a single VCSEL for time-multiplexed convolutional operations, yielding output results in the form of fast (sub-ns long) spikes directly in the optical domain. We note that network architectures with multiple VCSEL neurons operating simultaneously would also enable parallel computation, further increasing the speed of the system at the expense of increasing system’s complexity.
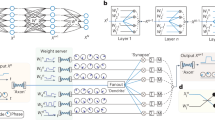
This work also bridges the gap between spike processing photonic hardware and software systems. To that end, we combine the photonic VCSEL-based spike image edge-feature detection system with a software implemented SNN to deliver full MNIST handwritten digit (HWD) image classification. To do so, the experimental photonic spiking data produced by the spiking VCSEL neuron system, containing the edge-feature information of 5000 MNIST handwritten digit images (see Fig. 5), was passed to a software SNN, which utilised hierarchical feature extraction and contained two further convolutional layers and a 10 feature fully-connected SoftMax layer for classification. The structure of the SNN is described further in the supplementary information. Figure 6a shows examples of outputs from the photonic edge detection system (MNIST digit 6 image) that become the inputs for the software SNN, which subsequently provides the SNN classification probability (Fig. 6b).

MNIST handwritten-digit classification with the hardware-software SNN. Six input feature maps, previously produced by the spiking VCSEL neuron (a) are introduced to the software implemented SNN and the resulting classification probability is plotted over multiple training cycles (b). Results for an MNIST ‘Digit 6’ are plotted in (a,b). A confusion matrix shows the task performance for each class of digit across the 5000 MNIST HWD images tested. The SNN produces an overall average performance of 96.1%.
The classification performance of the combined photonic spiking hardware and software SNN system is shown in Fig. 6c, with a very high average accuracy of 96.1%. The performance of this of hierarchical feature extraction SNN proved more impressive than that of a fully connected layer alone, which, when tested, produced an accuracy of 92.2%, highlighting the benefits of additional convolution layers in computer vision. The accuracy of this SNN system compares very well with recent results reported in other neuromorphic photonic systems based upon phase change materials23, where an accuracy of 95.3% was achieved using 4 edge detection kernels and a fully connected layer. However, unlike reported convolutional neural network demonstrations, the software implemented SNN provides a reduction in computational requirements, using around 10% of the computational power required for CNN operation, despite using multiple time steps to make a classification. The photonic system demonstrated in23 also reported a convolution rate of 2 GHz, similar to the maximum 1 GHz input rate currently possible with our spiking VCSEL neuron. The maximum spiking rate (1 GHz) achieved here uses commercially-obtained, non-bespoke device designs. We therefore expect spiking rates approaching 2 GHz or higher could be possible with future devices, further enhancing the convolution rate of our system. Additionally, as demonstrated in Fig. 4, we show good resilience to source image noise up to 15% global pixel intensity variation. Given the system was fed significantly noisier source images there would be a direct impact on classification accuracy due to a reduction in the number of spiking responses available for input into the software SNN.
The successful edge detection result coupled with the high classification accuracy of the SNN suggest that photonic hardware and software implemented SNNs can be combined for spike-based image processing systems. Further, the successful results and similar performance to the state-of-the art photonic systems, indicate that a fully photonic SNN network, based on interconnected VCSEL neurons, could be implemented for image processing systems. Here future challenges lie in improving the scalability of our experimental system, using technologies such as VCSEL arrays and weight adjustable photonic synapses41 (to enable the flow of information through layers of VCSEL neurons), and increasing the size of the kernel operators. The latter has also been investigated in the present work through numerical simulation (see supplementary information). Specifically, we analysed numerically the operation of our VCSEL neuron system with larger 3 × 3 kernel operators. Full details on the numerical model, equations and parameters, as well as all numerically calculated results, are provided in Supplementary Information. Our theoretical investigations showed the successful detection of target image features, as well as full edge-feature detection for larger 3 × 3 kernel operators. This demonstrates that the VCSEL neuron can successfully integrate larger bursts of input pulses (9 for the case of 3 × 3 kernel operators) with ultrashort temporal durations and separations between consecutive pulses (within the fast integration time-window of the device), that go beyond the capabilities of our experimental setup. The numerical findings therefore show that it could be possible to implement multiple layers of VCSEL neurons, such as those currently implemented by the software in this work (Fig. 6), towards the realisation of future VCSEL-based spike-based photonic image processing platforms.
Discussion
We demonstrate a neuromorphic photonic system for image processing using a single VCSEL as an artificial spiking neuron. The system benefits from high speed operation (using 100 ps-long inputs) and hardware-friendly implementation, relying on just a single VCSEL device and time division multiplexing. The proposed technique utilises the temporal input integration, thresholding, and spike firing capabilities of the VCSEL neuron, to perform all-optical spiking convolution on complex source images with a variety of kernel operators. This capability is used to demonstrate all-optical neuromorphic image edge-feature detection with a VCSEL neuron. Using streams of optical input pulses, we showed that consecutive 2 × 2 kernel operators and images can be run with a hardware-friendly single VCSEL platform, outputting fast neuromorphic spiking events for the detection of target edge features. Moreover, our approach showed very good robustness to image noise. We demonstrated that the system can successfully process 5000 images from the benchmark MNIST handwritten digit database. We showed that 500 images (per digit) can be processed in a single experimental run within 6.56 ms (at 13.12 μs per image) using commercial devices and components at telecom wavelengths, without any specific VCSEL optimisation stages. Additionally, combining the experimental photonic spiking outputs from the VCSEL neuron with a software-implemented SNN, we achieved a mean image classification accuracy of 96.1%, highlighting the potential of our approach for high-speed, low-energy spike-based image processing. Finally, we demonstrated theoretically that the operation of the VCSEL neuron with larger dimension (e.g. 3 × 3) kernels for more complex image feature extraction functionalities is also possible. This implies that VCSEL neurons have the potential to implement further convolution tasks, whether it be SNN layers (such as those in our software implemented SNN) or in recognition systems that target specific features. Overall, we believe that artificial spiking VCSEL neurons show high potential for future high speed, low energy, and hardware friendly neuromorphic photonic platforms for image processing with a fast telecom-compatible spiking representation.
Methods
Experimental setup
The fibre-based optical injection setup used for image processing (edge-feature detection) with an artificial optical spiking VCSEL is shown in Fig. 1. Light from a tuneable laser source (TL) is passed through an optical isolator to prevent reflections before entering a variable optical attenuator (VOA) to control optical injection power. A polarisation controller (PC) is used to maximize the performance of the 10 GHz Mach Zehnder intensity modulator (MZ), responsible for the optical encoding of the image input. Image inputs are generated by a 12 GSa/s, 5 GHz arbitrary waveform generator (AWG, Keysight M8190a) and amplified using an electrical amplifier before being fed into the MZ modulator. A second PC is then used to set the final polarisation of the optical injection. A coupler is used to monitor the optical injection power via a power meter (PM), and an optical circulator is used to inject the signal into the VCSEL neuron. Temporal analysis of the VCSEL neuron’s output is performed using a 9 GHz photodetector (PD, Thorlabs PDA8GS) and an 8 GHz, 20 GSa/s real-time oscilloscope (OSC, Rohde & Schwarz RTP). In this work the VCSEL is driven with a bias current of 4.0 mA (Ith = 0.83 mA) and is temperature stabilized at 293 K. The VCSEL device exhibited single transverse mode lasing with two orthogonal polarisation modes (device characterisation provided in supplementary information). Injection polarization was matched to that of the dominant (parallel) mode of the device and was made with a negative frequency detuning from the peak, inducing injection locking. The encoded inputs were configured to produce short (100 ps-long) drops or raises around the mean optical power of the injected signal (145 µW). When injected input pulses integrate sufficiently, the injection power drops below the locking threshold, inducing a locking/unlocking transition into a dynamical regime of excitable spiking dynamics. This mechanism is responsible for the neuronal functionality of the VCSEL neuron, allowing it to trigger fast sub-nanosecond (approx. 100 ps-long) spiking events in response to target edge features, directly in the optical domain.
Image edge detection
Image edge detection is performed according to Fig. 1. The pixel intensities of the source images are converted into integers (‘1’ for black and ‘−1’ for white). This is achieved either by averaging across RGB colour channels, or by selecting a specific colour channel, converting it to greyscale and using a configurable pixel intensity threshold to binarize the pixels intensities. During the convolution process, kernel operators apply weights to customizable regions of the source image, producing Hadamard products. The local pattern descriptor identifies the region of the source image that requires sampling for kernel operation. In this work, the local pattern descriptor is a square M x N pixel area (highlighted in red in Fig. 1c) with the anchor pixel present at M = N = 1. The local pattern descriptor has a (M + 1) × (N + 1) range of 2 × 2 pixels. No image padding was used during convolution, hence the final dimensions of the convolved image were reduced by 1. In this work, we demonstrate the in-system integration of multiple data inputs by the VCSEL neuron, thus performing the pooling of the Hadamard product. To achieve this, we encode the weighted pixel values into a RZ (return-to-zero) signal, where each value is assigned an individual pulse. Each encoded input pulse has an amplitude corresponding to its Hadamard product value, and a duration of ~ 100 ps FWHM. A peak-to-peak separation of ~ 150 ps is used between input pulses, with zero padding also added to fill the pixel to a configurable window. In this work a pixel window of 3.0 ns was selected, higher than the refractory period of the spiking dynamics in the VCSEL neuron (approx. 1 ns long), allowing each pixel to independently activate spiking responses. This encoding scheme makes use of time-division multiplexing to encode the Hadamard product into a sequence of input pulses and encode multiple convolution operations sequentially into a single device. The activation threshold, governed by the injection power and frequency detuning, is required to be set such that only inputs burst associated with image target features trigger activations. We can provide an estimated energy consumption of a single VCSEL neuron during edge detection based on the optical power of both the injection laser and VCSEL. For convolution (as seen in Fig. 5) at an input rate of one pixel per 3 ns, an injection power of 0.15 mW and a VCSEL output of 0.25 mW were used. We therefore require 1.2 pJ ((3 ns × 0.15 mW) + (3 ns × 0.25 mW)) to perform one operation. This values scales with the number of kernels used. For the application of 6 kernels (as in our experimental MNIST demonstration) a total of 7.2 pJ (6 × 1.2 pJ) is required to process one image pixel. If the time per pixel was reduced to the maximum spike firing rate of the system (approximately 1 spike every 1 ns) the energy consumption could be further reduced to 0.4 pJ per operation.
Influence of noise on edge detection performance
To implement global noise all pixel intensity was varied randomly according to the configurable noise percentage (%). The source image was implemented with 0%, 5%, 10%, 15% and 20% global noise. The weights of the kernel operators had to be altered such that the activation threshold was consistent for all integrating bursts across the 8 kernel operations. The maximum integrated input was therefore normalized by adjusting the vertical and horizontal kernel weights to the non-integer value of 0.75, such that 0.75 + 0.75 + 0.75 + 0.75 = 3. Finally, the convolutions of all 5 noisy images were combined into a single image input, such that the activation threshold was consistent across all tested images.
Data availability
All data underpinning this publication are openly available from the University of Strathclyde KnowledgeBase at https://doi.org/10.15129/cfc1e947-9afe-40fd-bb4b-c7e271a77941.
References
Krizhevsky, A., Sutskever, I. & Hinton, G. E. ImageNet classification with deep convolutional neural networks. in Advances in Neural Information Processing Systems (eds. Bartlett, P. et al.). Vol. 25. 1097–1105. (Curran Associates, 2013).
Wang, P. S. et al. O-CNN: Octree-based convolutional neural networks for 3D shape analysis. ACM Trans. Graph. 36(4), 1–11 (2017).
Zhang, C. et al. Optimizing FPGA-based accelerator design for deep convolutional neural networks. in Proceedings of the. 2015 ACM/SIGDA International Symposium on Field-programmable Gate Arrays. 161–170. (Association for Computing Machinery, 2015)
LeCun, Y., Bengio, Y. & Hinton, G. Deep learning. Nature 521, 436–444 (2015).
DeBole, M. V. et al. TrueNorth: Accelerating from zero to 64 million neurons in 10 years. Computer 52, 20–29 (2019).
Friedmann, S. et al. Demonstrating hybrid learning in a flexible neuromorphic hardware system. IEEE Trans. Biomed. Circuits Syst. 11, 128–142 (2017).
Miller, D. A. B. Attojoule optoelectronics for low-energy information processing and communications. J. Lightwave Technol. 35, 346–396 (2017).
Romeira, B., Figueiredo, J. L. & Javaloyes, J. NanoLEDs for energy-efficient and gigahertz-speed spike-based sub-λ neuromorphic nanophotonic computing. Nanophotonics 9(13), 4149–4162 (2020).
Ortega-Piwonka, I. et al. Bursting and excitability in neuromorphic resonant tunnelling diodes. J. Phys. Rev. Appl. 15, 034017 (2021).
Romeira, B. et al. Excitability and optical pulse generation in semiconductor lasers driven by resonant tunnelling diode photo-detectors. Opt. Exp. 21, 20931 (2013).
George, J. K. et al. Neuromorphic photonics with electro-absorption modulators. Opt. Exp. 27, 5181 (2019).
Feldmann, J. et al. All-optical spiking neurosynaptic networks with self-learning capabilities. Nature 569, 208–215 (2019).
Pammi, V. A. et al. Photonic computing with single and coupled spiking micropillar lasers. IEEE J. Sel. Top. Quantum Electron. 26, 1–7 (2020).
Selmi, F. et al. Spike latency and response properties of an excitable micropillar laser. Phys. Rev. E 94, 042219 (2016).
Dillane, M. et al. Excitable interplay between lasing quantum dot states. Phys. Rev. E. 100, 012202 (2019).
Dillane, M. et al. Asymmetric excitable phase triggering in an optically injected semiconductor laser. Opt. Lett. 46, 440–443 (2021).
Sarantoglou, G., Skontranis, M. & Mesaritakis, C. All optical integrate and fire neuromorphic node based on single section quantum dot laser. IEEE J. Sel. Top. Quantum. Electron. 26(5), 1–10 (2020).
Tait, A. N. et al. Neuromorphic photonic networks using silicon photonic weight banks. Sci. Rep. 7(1), 7430 (2017).
Shainline, J. M. et al. Superconducting optoelectronic circuits for neuromorphic computing. Phys. Rev. Appl. 7, 034013 (2017).
Tait, A. N. et al. Broadcast and weight: An integrated network for scalable photonic spike processing. J. Lightw. Technol. 32(21), 4029–4041 (2014).
Antonik, P. et al. Human action recognition with a large-scale brain-inspired photonic computer. Nat. Mach. Intell. 1(11), 530–537 (2019).
Bueno, J. et al. Conditions for reservoir computing performance using semiconductor lasers with delayed optical feedback. Opt. Express 25(3), 2401–2412 (2017).
Feldmann, J. et al. Parallel convolutional processing using an integrated photonic tensor core. Nature 589, 52–58 (2021).
Mehrabian, A. et al. PCNNA: A photonic convolutional neural network accelerator. IEEE Int. Syst. Chip Conf. (SOCC) 2018, 169–173 (2018).
Xu, S. et al. High-accuracy optical convolution unit architecture for convolutional neural networks by cascaded acousto-optical modulator arrays. Opt. Exp. 27, 19778–19787 (2019).
Prucnal, P. R., Shastri, B. J. & Ferreira de Lima, T. Recent progress in semiconductor excitable lasers for photonic spike processing. Adv. Opt. Photon. 8, 228–299 (2016).
Kirkland, P. et al. SpikeSEG: Spiking segmentation via STDP saliency mapping. in 2020 International Joint Conference on Neural Networks (IJCNN). 1–8. (2020).
Kirkland, P. et al. UAV detection: A STDP trained deep convolutional spiking neural network retina-neuromorphic approach. in Artificial Neural Networks and Machine Learning—ICANN 2019: Theoretical Neural Computation. ICANN 2019. Lecture Notes in Computer Science. Vol 11727. (Springer, 2019).
Kirkland, P. et al. Imaging from temporal data via spiking convolutional neural networks. in Proceedings of the SPIE 11540, Emerging Imaging and Sensing Technologies for Security and Defence V; and Advanced Manufacturing Technologies for Micro- and Nanosystems in Security and Defence III. 115400J. (2020).
Park, J. et al. A 65k neuron 73-Mevents/s 22-pJ/event asynchronous micro-pipelined integrate and-fire array transceiver. in IEEE 2014 Biomedical Circuits and Systems Conference, BioCAS 2014—Proceedings. 675–678. (2014).
Song, Z. et al. Photonic spiking neural network based on excitable VCSELs-SA for sound azimuth detection. Opt. Express 28, 1561–1573 (2020).
Robertson, J. et al. Toward neuromorphic photonic networks of ultrafast spiking laser neurons. IEEE J. Sel. Top. Quantum Electron. 26, 7700715 (2019).
Deng, T., Robertson, J. & Hurtado, A. Controlled propagation of spiking dynamics in vertical-cavity surface-emitting lasers: Towards neuromorphic photonic networks. IEEE J. Sel. Top. Quantum Electron. 23, 1800408 (2017).
Hejda, M. et al. Spike-based information encoding in VCSELs for neuromorphic photonic systems. J. Phys. 2, 044001 (2020).
Robertson, J. et al. Ultrafast optical integration and pattern classification for neuromorphic photonics based on spiking VCSEL neurons. Sci. Rep. 10, 1 (2020).
Xiang, S. et al. STDP-based unsupervised spike pattern learning in a photonic spiking neural network with VCSELs and VCSOAs. IEEE J. Sel. Top. Quantum Electron. 25, 1700109 (2019).
Robertson, J. et al. Image edge detection with a photonic spiking VCSEL-neuron. Opt. Exp. 28, 37526–37537 (2020).
Zhang, Y. et al. All-optical neuromorphic binary convolution with a spiking VCSEL neuron for image gradient magnitudes. Photon. Res. 9, B201–B209 (2021).
Hejda, M. et al. Neuromorphic encoding of image pixel data into rate-encoded optical spike trains with a photonic VCSEL-neuron. Appl. Phys. Lett. Photon. 6, 060802 (2021).
LeCun, Y. The MNIST Database of Handwritten Digits. (Courant Institute, NYU Corinna Cortes, Google Labs, Microsoft Research).
Alanis, J. A. et al. Weight adjustable photonic synapse by nonlinear gain in a vertical cavity semiconductor optical amplifier. Appl. Phys. Lett. 119, 201104 (2021).
Acknowledgements
The authors acknowledge support from the UKRI Turing AI Acceleration Fellowships Programme (EP/V025198/1), the US Office of Naval Research Global (Grant ONRG-NICOP-N62909-18-1-2027), the European Commission (Grant 828841-ChipAI-H2020-FETOPEN-2018-2020), the UK EPSRC (EP/N509760/1, EP/P006973/1), and Leonardo UK Ltd through the Leonardo Lectureship at Strathclyde.
Author information
Authors and Affiliations
Contributions
J.R., M.H., J.A.A., & J.B. carried out the experimental work under the supervision of A.H. P.K. obtained classification results with the software SNN under the supervision of G.D. All authors helped identify the presented work, discussed the results, and contributed to the writing of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Robertson, J., Kirkland, P., Alanis, J.A. et al. Ultrafast neuromorphic photonic image processing with a VCSEL neuron. Sci Rep 12, 4874 (2022). https://doi.org/10.1038/s41598-022-08703-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-022-08703-1
This article is cited by
-
DWELL InAs quantum-dot VCSEL noise behavior promotion subjected to optical injection locking
Applied Physics B (2024)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
