
Abstract
The magnetic flux gate sensors based on Faraday’s Law of Induction are widely used for DC or extremely low frequency magnetic field detection. Recently, as the fast development of multiferroics and magnetoelectric (ME) composite materials, a new technology based on ME coupling effect is emerging for potential devices application. Here, we report a magnetoelectric flux gate sensor (MEFGS) for weak DC magnetic field detection for the first time, which works on a similar magnetic flux gate principle, but based on ME coupling effect. The proposed MEFGS has a shuttle-shaped configuration made of amorphous FeBSi alloy (Metglas) serving as both magnetic and magnetostrictive cores for producing a closed-loop high-frequency magnetic flux and also a longitudinal vibration, and one pair of embedded piezoelectric PMN-PT fibers ([011]-oriented Pb(Mg,Nb)O3-PbTiO3 single crystal) serving as ME flux gate in a differential mode for detecting magnetic anomaly. In this way, the relative change in output signal of the MEFGS under an applied DC magnetic anomaly of 1 nT was greatly enhanced by a factor of 4 to 5 in comparison with the previous reports. The proposed ME flux gate shows a great potential for magnetic anomaly detections, such as magnetic navigation, magnetic based medical diagnosis, etc.
Similar content being viewed by others

Introduction
Multiferroic magnetoelctric (ME) materials have been attracting considerable interest due to the potential application, particularly in terms of magnetic field sensors, microelectromechanical system, tunable microwave devices, tunable bandpass/bandstop filters, tunable phase shifters and spintronics, etc, since the last two decades1,2,3,4,5,6. It has been investigated and proved that multi-phase ME composites are able to exhibit much better ME coupling effect than single phase ME materials at room temperature7,8,9. In recent years, a variety of bulk ME composites with different phase connectivity, i.e., (0-3), (1-3), (2-2), (2-1), or (1-1), have been paid extensive attention, and tremendous progress has been achieved10,11,12,13,14,15,16,17,18,19. To date, one-dimensional (1-1) connectivity ME composites consisting of a [011]-oriented Pb(Mg,Nb)O3-PbTiO3 (PMN-PT) single crystal fiber laminated with laser-treated amorphous FeBSi alloy (Metglas) and operating in L-T mode (longitudinally magnetized and transversely poled) achieved the highest resonance ME coefficient of ~7 kV cm −1 Oe −1 in the case of bulk composites19. In addition, ME thin film cantilever type sensors made of AlN and FeCoSiB could possess a high resonance ME coupling coefficient of 5 kV cm −1 Oe −1 in the air, and even 20 kV cm −1 Oe −1 in vacuum20, 21.
In spite of the significant advances, it is always and will remain an open challenge in sensing weak DC and extremely low frequency AC (ranging from 10 mHz to 10 Hz) magnetic fields due to the large 1/f noise22,23,24,25. In this respect, magnetic sensors based on flux gate principle, superconducting quantum interference effect (SQUIDs), tunneling magnetoresistance(TMR), anisotropic magnetoresistance (AMR), giant magnetoresistance (GMR), giant magnetoimpedance (GMI), and nonlinear magnetoelectric effect have intrigued dramatic research interests26,27,28,29,30. However, the applications of magnetic sensors are subjected to many limitations. For example, SQUIDs-based devices requires extremely low operation temperature, which leads to high manufacture and maintenance cost26. The need for an external magnetic bias for TMR, GMR and GMI sensors to optimize the sensitivity inevitably increases the volume and power consumption of a detection system27,28,29. In addition, the resistance variation in terms of AMR or GMR sensors is quite low in responding to weak magnetic field27, 29, 30. Furthermore, the frequency conversion technology based on nonlinear ME effect fails to work when it comes to the measurement of DC magnetic field22, 23. It is well known that flux gate sensors are able to detect small DC magnetic fields, typically, from 0.5 nT to 100 μT, and now they have been widely used in the market31,32,33,34,35,36. Unfortunately, their power consumption tends to be rather high since the requirement to saturate the magnetic core materials periodically37.
In this paper, we report a shuttle-shaped, non-biased magnetoelectric flux gate sensor (MEFGS) enlightened by the working mechanism and configuration of the magnetic flux gate sensors31, 35. We have studied its working mechanism in comparison with flux gate sensors and characterized the ME performance as well. In addition, we also investigate its absolute DC magnetic field sensitivity in comparison with those based on the conventional magnetic detection technologies. We will see the relative change in output signal of the MEFGS under an applied DC magnetic anomaly of 1 nT was greatly enhanced by a factor of 4 to 5 in comparison with the previous reports.
Results
Structure design and working principle
Conventional flux gate magnetic sensors are based on Faraday’s Law of Induction for magnetic anomaly detection. Figure 1(a) and (b) show the structure and working principle of a racetrack magnetic flux gate sensor. As shown in Fig. 1(a), the flux gate sensor is composed of a racetrack type magnetic core surrounded by an excitation (first) coil and a detection (second) coil. The first coil is used for exciting an AC magnetic field H AC , which produces a closed-loop flux Ф0 in the racetrack magnetic core and saturates the magnetic core materials periodically. The second coil is used for detecting magnetic anomaly (H DC )35. In the case of (H DC ) = 0, the output of the magnetic flux gate sensor could be absent in theory, since the net magnetic flux Ф (=Ф0 − Ф0) passing through the second coil is zero, as shown in Fig. 1(a). However, we could expect an effective output signal Eout = − 2dΔФ/dt, from the second coil in the presence of DC magnetic field H DC , because there is a net magnetic flux Ф ( = 2ΔФ) passing through the second coil, see Fig. 1(b).

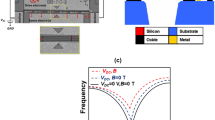
Schematic representation of the conventional flux gate senor and our proposed magnetoelectric flux gate sensor. The structure of (a), (b) a race-track flux gate sensor and (c), (d) our proposed Magnetoelectric (ME) flux gate sensor; (a), (c) in the absence of DC magnetic field (H DC ); (b), (d) in the presence of DC magnetic field (H DC ); (e) A photograph of the actual ME flux gate; (f) A cross-sectional optical image of the ME composites.
In a similar way as described in Fig. 1(a) and (b), a magnetoelectric flux gate sensor (MEFGS) is designed into a shuttle-shaped structure (instead of a racetrack structure) with an excitation coil and one pair of piezoelectric sensing elements (instead of second coil), as shown in Fig. 1(c) and (d). When a constant AC current I AC passes through the excitation coil, a closed-loop high-frequency magnetic field H AC and flux Ф0 can be excited in the magnetic core, which induces a symmetric elongating and shrinking of two halves due to the magnetostrictive effect. Therefore, a longitudinal vibration mode of the shuttle-shaped structure is produced, and correspondingly, the difference output ME signal from ME gate will be zero due to symmetric vibration in the absence of an applied DC magnetic field, as shown in Fig. 1(c) with dash line.
However, once a DC magnetic anomaly appears, the magnetic field increases in one half, and while it decreases in another half, which then causes unsymmetrical elongating and shrinking in two halves of the structure. As a result, the initial longitudinal vibration mode of the shuttle-shaped structure tends to be a longitudinal-bending one due to the effect of magnetic anomaly H DC , as shown in Fig. 1(d) with dash line. In this case, the differential signal output from ME flux gate will be non-zero.
With respect to a flux gate sensor, the induced E out from the second coil under H DC can be found as ref. 34
in which E out is proportional to H DC . Note that E out is a second harmonic signal relative to H AC . When it comes to the proposed ME flux gate sensor, the working mechanism, which is similar to that of flux gate sensor, is illustrated in Fig. 2. The magnetostrictive curve is assumed to be a quadratic function of H (λ = kH 2, where k is a parameter related to the magnetostrictive performance of magnetic material), as shown in Fig. 2(a). Here assuming the exciting magnetic field H AC = H m cos(ωt) is small. In the case without an external magnetic field H DC , H AC in top half of the shuttle-shaped magnetostrictive core is equal to that in bottom half in amplitude, but they are in reverse phase. H AC then excites two symmetric but frequency-doubling magnetostrictions λ 1(H AC) and λ 2(−H AC) in two halves of the shuttle-shape magnetic core. Therefore, the induced two ME signals from one pair of piezoelectric sensing elements will be completely identical, resulting a zero output signal from ME flux gate due to its differential mode. However, when an additional external magnetic field H DC appears, see Fig. 1(d), the magnetic field in top half will become (H AC + H DC ), while in bottom half it becomes (−H AC + H DC ), as they are shown in a time domain in Fig. 2(b). Therefore, the magnetostrictions λ 1(H AC + H DC ) produced in top half and λ 2(−H AC + H DC ) in bottom half will become asymmetric, as they are presented in time domain in Fig. 2(c). The asymmetric magnetostrictions in two halves further induce asymmetric two ME signals due to ME coupling effect, and their differential output ΔVME from ME flux gate is non-zero that is directly proportional to the external magnetic field H DC , see Fig. 2(d).

The working principle of our proposed magnetoelectric flux gate sensor. (a) The magnetostrictive curve of magnetic core; (b) the magnetic field in top half: (H AC + H DC ), while in bottom half: (−H AC + H DC ); (c) The double-frequency magnetostrictions of λ 1 and λ 2 in time domain for two half magnetic cores (1# and 2#); (d) The magnetostrictive difference Δλ and the ME signal difference \(\Delta {V}_{ME}\) of two halves in time domain in same-frequency first harmonic signal form; the inset is Δλ as a function of H DC and its derivative with respect to H DC .
Now we try to find the relationship between ΔVME and H DC . Assuming a DC magnetic filed H DC appearing along longitudinal axis direction, as shown in Fig. 1(d), and further assuming the applied H DC is small, the magnetostrictive difference \({\rm{\Delta }}{\rm{\lambda }}\) between two halves is
It is well known the output ME voltage V ME can be written as ref. 23
where α ME is the ME coupling coefficient, σ is the mechanical stress, and t p is the thickness of the piezoelectric phase. Considering that the ME flux gate sensor working in a differential mode, the output differential ME voltage \(\Delta {V}_{ME}\) can be expressed as follow23:
where \({g}_{32,p}=-\frac{\partial {E}_{3}}{\partial {\sigma }_{2}}\,\,\)is the transverse piezoelectric voltage constant of the [011]-oriented PMN-PT;\(\,{s}_{33}^{\ast }=1/(\frac{\partial {\sigma }_{3}}{\partial {\lambda }_{3}})\) is the equivalent elastic compliance of the ME composite; \(k=\frac{{\partial }^{2}\lambda }{\partial {H}^{2}}\) is a constant associated with material properties. The output differential ME voltage ΔV ME in time domain is first harmonic signal, as shown in Fig. 2(d). Note that the ME voltage ΔV ME is proportional to both H DC and H AC .
It should be pointed that if the DC magnetic field is completely absent, the magnetostrictions of the two halves of the shuttle-shape magnetic core exhibit frequency-doubling effect. Frequency doubling and harmonic distortion behaviors in laminated ME composite have been previously studied theoretically and experimentally38,39,40,41,42. Dmitrii et al. reported a DC magnetic field detection with a responsibility of 2.5 V/mT based on the nonlinear magnetoelectric effect of a well-known sandwiched ME structure42. In the shuttle-shaped ME flux gate sensor, from the Equation 4, the output voltage \({\rm{\Delta }}{V}_{ME}\) should be zero in theory when there is no applied field H DC . Once a H DC appears, \({\rm{\Delta }}{V}_{ME}\), which is proportional to H DC , is induced, and it exhibits the same-frequency harmonic signal as that of H AC , i.e., the frequency-doubling phenomenon will disappear. Clearly, “frequency-doubling” to “same-frequency” phenomenon may be an important criterion to indicate H DC appearing. While differing from it, the “same-frequency” to “frequency-doubling” phenomenon may be an important criterion to indicate H DC appearing for a flux gate sensor. Therefore, the proposed ME flux gate sensor offers a new approach for DC magnetic field detection, and it will be expected to possess the equal or even better performance for sensing extremely weak DC magnetic field in comparison with magnetic flux gate sensor, but it has much lower power consumption and also much smaller sizes.
Materials fabrication and mechanism confirmation
We fabricated a magnetoelectric flux gate sensor. The magnetic core of MEFGS is made of laser-treated amorphous FeBSi alloy (Metglas) which has a high permeability and also piezomagnetic effect. The methods concerning the laser treatment and the sensor fabrication have been reported by Chu et al.19. One pair of [011]-oriented PMN-PT single crystal fibers (as labeled as 1# and 2#) were embedded in the magnetic core. Figure 1(e) shows the prototype of our proposed ME flux gate sensor and the cross-sectional optical microscopy image of the ME composite is shown in Fig. 1(f). The three-dimensional view of the ME flux gate sensor and its forced vibration mode (at non-resonant frequency) under H AC excitation are presented in Fig. 3(a-i) and (a-ii), respectively. We then verified the theoretical analysis concerning the proposed MEFGS experimentally. Figure 3(b) shows differential signal output \({\rm{\Delta }}{V}_{ME}\) (at non-resonant frequency f = 48.5 kHz) under different magnetic anomaly H DC , which was observed directly from a mixed digital signal oscilloscope (Keysight 4024 A). It can be clearly seen that \({\rm{\Delta }}{V}_{ME}\,\)is near zero when HDC = 0 \(\mu T\). Once a DC magnetic field of 2 or 4 μT appears, a dramatic differential ME signal (first harmonic) is produced from the ME flux gate sensor. The measured results agree well with those as expected in Fig. 2(d).

The experimental verification concerning the working principle and the ME performance for our proposed ME Gate sensor. (a-i) Three-dimensional view of the ME flu gate sensor made of a laser-treated Metglas magnetic core (shuttle shape) and one pair of [011]-oriented PMN-PT single crystal fibers (as labeled as 1# and 2#) embedded in the magnetic core; (a-ii) A schematic view of the forced vibration mode at non-resonant frequency. (b) The differential signal output of the MEFGS in response to varying DC magnetic field at 0 μT, 2 μT, 4 μT, respectively; The frequency response of ME coupling coefficient \({\alpha }_{ME,1\#}\), \({\alpha }_{ME,2\#}\) and \({\alpha }_{ME,1\#+2\#}\) of the MEFGS in frequency range from 1 to 50 kHz (c), and 19 to 21 kHz (d). Here,\(\,{\alpha }_{ME,1\#+2\#}\) is the sum ME signal output of two halves of the MEFGS when the two terminals are connected in series.
Figure 3(c) shows the measured frequency responses of ME electric field coefficient \({\alpha }_{ME}\) of the MEFGS. The ME coupling coefficient \({{\rm{\alpha }}}_{{\rm{ME}}}\) for each half of the shuttle shape ME sensor are 22.6 and 22.2 \(\,V/{\rm{cmOe}}\) at non-resonance; while at resonance frequency of 20.02 kHz, it dramatically increases to 2918 and 2894 \(\,V/\mathrm{cm}\ast \mathrm{Oe}\), respectively. It can be seen from the measured frequency spectrum characteristics as presented in Fig. 3(d) that the two halves of the MEFGS structure exhibit quite similar ME performance, proving that they are wonderful symmetric. The sum output of the two halves even reaches to 5700 V/cmOe, which is close to the best result reported in one dimensional (1-1) ME composite19.
It is widely known that ME composite materials exhibit the strong magnetoelectric coupling at resonance, therefore, a high magnetic field sensitivity at resonant frequency should be expected. Chu et al. develpoed a one-dimensional [011]-oriented PMN-PT/Metgals (1-1) composite, which had a limit AC magnetic field sensitivity as low as 1.35 × 10−13 Tesla at resonant frequency19. Gao et al. reported a (2-1) Metglas/PMN–PT laminate sensors showing a DC magnetic field sensitivity as high as (i) 5 nT at 1 kHz and (ii) 1 nT near the resonant frequency in a shield chamber25.
High sensitivity to weak DC magnetic field
In this work, we investigate the DC magnetic field responses of the MEFGS in the both cases of resonance and non-resonance frequencies. Measurements of magnetic field sensitivity was carried out in a shielded chamber with a lock-in amplifier. We found that under exciting of a closed-loop H AC with the frequency of f = 10.5 kHz, the MEFGS exhibits a strong resonant response at f r = 21 kHz, because of the frequency-double effect. We then observed H DC response at f = 10.5 kHz due to “frequency-doubling” to “same-frequency” effect. Figure 4 shows the measured ME differential voltage response to a weak and step-varying H DC . As shown in Fig. 4(a), a step-varying δH DC of 4 nT could be distinguished clearly, and the ME differential signal was also able to return to the initial level. However, when further decreasing δH DC to be 2 nT, we found the noise level becomes non-ignorable, as shown in Fig. 4(b). Apparently, noise level at resonance is a main obstacle to the detection of an extremely weak DC magnetic field. In order to improve DC magentic field sensitivity, it seems that H AC exciting at resonant frequency is unnecessary, because it could increase the undesired noise greatly (althogh it also improves ME coupling greatly). In our case, lowering noise of MEFGS and obtaining a stable vibration condition are eseential for sensing an extremely low DC magneitc field.

ME voltage output signal of the MEFGS in response to a weak step-varying DC magnetic field at the first-order longitudinal vibration mode (fr1 = 10.5 kHz). (a) In response to a step of 4 nT. (b) In response to a step of 2 nT.
Finally, we investigate the DC magnetic field responses of the MEFGS in non-resonance frequency range, including its limit of detection (LOD) of DC magnetic field. We chose a much higher working frequency around 48.5 kHz for exciting AC magnetic field in the closed-loop magnetic core of MEFGS, which is deviated far from the resonant state of the MEFGS. Since it is a non-resonance forced vibration mode, we accordingly increase the AC current for produing a relatively higher H AC . Figure 5(a) shows the measured differential ME voltage output signal in response to an applied H DC varying from 0.2 to 200000 nT. Apparently, there is a knee H DC,K or threshold about 1000 nT. When H DC is higher than H DC,K , the MEFGS exhibits a strong linear-response to the applied H DC with a large slope. While H DC is lower than H DC,K , the MEFGS shows a weak linear-responses to H DC with a small slope, which may be attributed to interface effect of ferromagnetic and ferroelectric two phase, including interface strain transfer loss and interface voltage drop at bonding layer (like a capacitor)43. Figure 5(b) shows the zoomed area where DC magnetic field is limited in a small range, starting from 0.2 to 20 nT. It is clearly seen that output signal exhibits a linear relationship with H DC starting from 1 nT. Measurement values then become scattering when H DC is less than 1 nT. However, the LOD value of H DC can be clearly seen to be 2 nT and 1 nT, respectivelly, as presented in Fig. 5(c), and Fig. 5(d), revealing a superhigh DC magnetic field sensitivity of the MEFGS. It should be noted here that the relative changes of the ME voltage output signal in response to 1 nT is only 0.2%, but it is still nearly 4 to 5 times higher in comparison with previously measurements on 1 nT DC magnetic field detection25. This result is significant, which shows that a ME flux gate sensor under exciting of non-resonant high frequency H AC may have higher DC magnetic field sensitivity due to lower vibration noise, which is apparently different from the previous claims in conventional ME sensors25, 44. In addition, there is no need to apply a bias field for achieving a LOD value of 1 nT in present work.

Charaterization for weak DC magneitic field measured at non-resonat frequency. (a) The magnetic field sensitivity in terms of DC magnetic field varying from 0.2 to \(2\ast {10}^{5}\) nano Tesla at non-resonant frequency of 48.5 kHz. (b) The zoomed area of (a) with DC magnetic field starting from 0.2 to 20 nano Tesla. ME voltage output signal in response to an extremely weak step-varying DC magnetic field of 2 nT (c)and 1 nT (d) at f = 48.5 kHz, which is far deviate from the resonant frequency of the MEFGS.
Discussion
To further improve the MEFGS, following jobs are necessary: (i) improving symmertry about two halves of the MEFGS structure for lowering noise; (ii) decreasing interface effect of ferromagnetic and ferroelectric two phases for lowering knee H DC,K ; and (iii) optimizing ME working mode for obtaining a more stable performance. (iv) seeking piezoelectric materials with lower dielectric loss and piezomagetic materials with higher piezomagetic property. Proposed MFFGS shows high DC field detection sentivity that has significant potential toward pratical application in magnetic navigation systems and medical diagnosis.
In summary, a DC magnetic field sensor working on magnetoelectric coupling effect and flux gate principle (named as MEFGS) is proposed for the first time; its principle in comparison with the conventional flux gate sensor is analyzed theoretically and then confirmed experimentally. MEFGS is composed of a shuttle-shaped, laser-treated, and multilayered amorphous FeBSi alloy (Metglas) magnetic core and one pair of embedded [011]-oriented Pb(Mg,Nb)O3-PbTiO3 (PMN-PT) single crystal fibers. The fabricated MEFGS exhibits the strong ME coupling: non-resonance ME coefficients of two halves in the shuttle-shape structure are 22.6 and 22.28 V/cm Oe, respectively; while at resonance, they are dramatically increased to 2918 and 2894 \(\,V/\mathrm{cm}\,\mathrm{Oe}\), respectively. These results also show well symmetry of the shuttle shape structure, which is important to a flux gate magnetic sensor due to its differential working mode. It was further found that the MEFGS has a wide response to DC magnetic field ranging from 0.2 to 200000 nT, accompanying a knee H DC,K or threshold phenomenon at H DC = 1000 nT possibally due to interface effect. The repeatable, absolute limit of detection (LOD) of DC magnetic field is found to be 1 nT at non-resonant frequency and at room temperature without bias magnetic field. The relative change of output signal of the MEFGS at 1 nT is 4 to 5 times higher in comparison with the previous reports. Proposed MEFGS can be viewed as a potential alternative ultra-sensitive DC magnetic field sensor, like flux gate sensor in particular, which shows significant availability toward practical application in magnetic navigations and magnetic based medical diagnosis because of very low power consumption and fine structure.
Methods
ME performance characterization
the ME coefficient was measured at room temperature using a homemade setup. A purchased Helmholtz coil and a DC current supply (IT6932A, ITECH, USA) were used to produce a direct current (DC) magnetic field bias (0–6 Oe). And a home-made Helmholtz coil carrying a standard AC current (6221, Keithley, USA) was used to generated an AC magnetic field. The induced voltages from two piezoelectric sensing elements (PMN-PT single crystal,1# and 2#) were measured with a lock-in amplifier (SR850, Stanford Research, USA), the time constant (integration time) and the bandwidth of which were set at 100ms and 1.2 Hz, respectively.
DC magnetic field measurement
As presented in Fig. 1(d), the two halves of the magnetic core are exposed to a common applied DC filed H DC (a small quantity) and to the AC excitation field H 1 and H 2, respectively. Since the two terminals were winded with an opposite direction, H 1 is completely reverse to H 2. Here the DC magnetic field was excited with a purchased solenoid coil carrying a standard DC current (6221, Keithley, USA) and the AC magnetic field was generated through home-made coils (the number of turns is 200 for each half as shown in Fig. 1(d)) excited by a Function/Arbitrary Waveform Generator (Agilent 33522 A). In addition, the induced differential voltage variations from two piezoelectric sensing elements (PMN-PT single crystal, 1# and 2#) were measured with a lock-in amplifier (SR850, Stanford Research, USA).
Data availability
The datasets generated analysed during the current study are available from the corresponding author on reasonable request.
References
Hu, J., Chen, L. & Nan, C. W. Multiferroic heterostructures integrating ferroelectric and magnetic materials. Adv. Mater. 28, 15 (2016).
Eom, C. & McKinstry, S. Thin-film piezoelectric MEMS. MRS Bull. 37, 1007 (2012).
Scott, J. Applications of modern ferroelectrics. Science 315, 954 (2007).
Wang, K., Alzate, J. & Amiri, P. Low-power non-volatile spintronic memory: STT-RAM and beyond. J. Phys. D: Appl. Phys. 46, 047003 (2013).
Nan, C. W., Bichurin, M. I., Dong, S. X., Viehland, D. & Srinivasan, G. Multiferroic magnetoelectric composites: historical perspective, status, and future directions. J. Appl. Phys. 103, 031101 (2008).
Annapureddy, V. et al. Low-Loss Piezoelectric Single‐Crystal Fibers for Enhanced Magnetic Energy Harvesting with Magnetoelectric Composite. Adv. Energy Mater. 6, 1601244 (2016).
Wang, Y. J., Li, J. F. & Viehland, D. magnetoelectrics for magnetic sensor applications: status, challenges and perspectives. Mater. Today. doi:10.1016/j.mattod.2014.05.004 (2014).
Zhai, J. Y., Xing, Z. P., Dong, S. X., Li, J. F. & Viehland, D. Magnetoelectric laminate composites: an overview. J. Am. Ceram. Soc. 91, 51 (2008).
Palneedi, H., Annapureddy, V., Priya, S. & Ryu, J. Status and perspectives of multiferroic magnetoelectric composite materials and applications. Actuators 5, 9 (2016).
Ma, J., Hu, J. M., Li, Z. & Nan, C. W. Recent progress in multiferroic magnetoelectric composites: from bulk to thin films. Adv. Mater. 23, 1062 (2011).
Ramesh, R. & Spaldin, N. A. Multiferroics: progress and prospects in thin films. Nat. Mater. 6, 21 (2007).
Ma, J., Shi, Z. & Nan, C. W. Magnetoelectric Properties of Composites of Single Pb(Zr,Ti)O3 Rods and Terfenol-D/Epoxy with a Single-Period of 1-3-Type Structure. Adv. Mater. 19, 2571 (2007).
Dong, S. X., Li, J. F. & Viehland, D. A longitudinal-longitudinal mode TERFENOL-D∕Pb (Mg1∕3Nb2∕3)O3-PbTiO3 laminate composite. Appl. Phys. Lett. 85, 5305 (2004).
Zhai, J. Y., Dong, S. X., Xing, Z. P., Li, J. F. & Viehland, D. Giant magnetoelectric effect in Metglas/polyvinylidene-fluoride laminates. Appl. Phys. Lett. 89, 083507 (2006).
Jin, J. Z. et al. Multiferroic polymer composites with greatly enhanced magnetoelectric effect under a low magnetic bias. Adv. Mater. 23, 3853 (2011).
Dong, S. X., Zhai, J. Y., Li, J. F. & Viehland, D. Near-ideal magnetoelectricity in high-permeability magnetostrictive/piezofiber laminates with a (2-1) connectivity. Appl. Phys. Lett. 89, 252904 (2006).
Dong, S. X., Zhai, J. Y., Xing, Z. P., Li, J. F. & Viehland, D. Giant magnetoelectric effect (under a dc magnetic bias of 2 Oe) in laminate composites of FeBSiC alloy ribbons and Pb(Zn1∕3, Nb2∕3)O3-7% PbTiO3 fibers. Appl. Phys. Lett. 91, 022915 (2007).
Gao, J. Q., Shen, L. G., Wang, Y. J., Gray, D. J. F. & Viehland, D. Enhanced sensitivity to direct current magnetic field changes in Metglas/Pb(Mg1/3Nb2/3)O3-PbTiO3 laminates. J. Appl. Phys. 109, 074507 (2011).
Chu, Z. Q. et al. Enhanced Resonance Magnetoelectric Coupling in (1-1) Connectivity Composites. Adv. Mater. 29, 1606022 (2017).
Kirchhof, C. et al. Giant magnetoelectric effect in vacuum. Appl. Phys. Lett. 102, 232905 (2013).
Yarar, E. et al. Inverse bilayer magnetoelectric thin film sensor. Appl. Phys. Lett. 109, 022901 (2016).
Liu, Y. et al. Frequency conversion in magnetoelectric composites for quasi-static magnetic field detection. Appl. Phys. Lett. 103, 212902 (2013).
Jahns, R., Greve, H., Woltermann, E., Quandt, E. & Knöchel, R. Sensitivity enhancement of magnetoelectric sensors through frequency-conversion. Sensors and Actuators A 183, 16 (2012).
Nan, T. X., Hui, Y., Rinaldi, M. & Sun, N. X. Self-biased 215 MHz magnetoelectric NEMS resonator for ultra-sensitive DC magnetic field detectt. Sci. Rep. 3, 1985, doi:10.1038/srep01985 (2013).
Gao, J. et al. Enhanced sensitivity to direct current magnetic field changes in Metglas/Pb (Mg1/3Nb2/3) O3–PbTiO3 laminates. J. Appl. Phys. 109, 074507 (2011).
Mahdi, A., Panina, L. & Mapps, D. Some new horizons in magnetic sensing: high-Tc SQUIDs, GMR and GMI materials. Sens. Actuators A 105, 271 (2003).
Li, P. et al. Electric Field Manipulation of Magnetization Rotation and Tunneling Magnetoresistance of Magnetic Tunnel Junctions at Room Temperature. Adv. Mater. 26, 4320 (2014).
Karnaushenko, D. et al. High‐Performance Magnetic Sensorics for Printable and Flexible Electronics. Adv. Mater. 27, 880 (2015).
Karnaushenko, D. et al. Self-Assembled On-Chip-Integrated Giant Magneto‐Impedance Sensorics. Adv. Mater. 27, 6582 (2015).
Wang, Z. L. et al. Highly Sensitive Flexible Magnetic Sensor Based on Anisotropic Magnetoresistance Effect. Adv. Mater. 28, 9370 (2016).
Ripka, P. Advances in fluxgate sensors. Sensors and Actuators A 106, 8–14 (2003).
Quesada, G., Lumbreras, M., Delagdo, R. & Roca, A. Class H Power Amplifier for Power Saving in Fluxgate Current Transducers. IEEE Sonseors J. 16, 2322 (2016).
Lu, C., Huang, J., Chiu, P., Chiu, S. & Jeng, J. High-sensitivity low-noise miniature fluxgate magnetometers using a flip chip conceptual design. Sensors 14, 13815 (2014).
Primdahl, F. The Fluxgate Mechanism, Part I: The Gating Curves of Parallel and Orthogonal Fluxgates. IEEE Trans. Magn. MAG-6, 376 (1970).
Ripka, P. Race-track fluxgate with adjustable feedthrough. Sensors and Actuators 85, 227 (2000).
Koch, R., Deak, J. & Grinstein, G. Fundamental limits to magnetic-field sensitivity of flux-gate magnetic-field sensors. Appl. Phys. Lett. 75, 3862 (1999).
Yang, X. et al. Design and realization of a novel compact fluxgate current sensor. IEEE Trans. Magn. 51, 4002804 (2015).
Ma, J., Li, Z., Lin, Y. & Nan, C. W. A novel frequency multiplier based on magnetoelectric laminate. Journal of Magnetism and Magnetic Materials 323, 101–103 (2011).
Zhang, W. H., Yin, G., Cao, J. W., Bai, J. M. & Wei, F. L. Frequency multiplying behavior in a magnetoelectric unimorph. Appl. Phys. Lett. 100, 032903 (2012).
Xu, H., Pei, Y. & Fang, D. The frequency dependence of harmonic hysteresis effect in magnetoelectric laminated composites. Compos. Struct. 147, 33 (2016).
Shi, Y. & Gao, Y. Theoretical study on nonlinear magnetoelectric effect and harmonic distortion behavior in laminated composite. Journal of Alloys and Compounds 646, 351–359 (2015).
Burdin, D. et al. DC magnetic field sensing based on the nonlinear magnetoelectric effect in magnetic heterostructures. J. Phys. D: Appl. Phys. 49, 375002 (2016).
Zhang, B. N., Zhang, J. Q., & Huang, S. L. Deformation transfer in smart structures with integrated piezoceramic sensors. Journal of Chongqing University (2000)
Dong, S., Zhai, J., Li, J. & Viehland, D. Small dc magnetic field response of magnetoelectric laminate composites. Appl. Phys. Lett. 88, 082907 (2006).
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant Nos 51132001, 51072003); Beijing Municipal Science and Technology Projects (Grant Nos Z131100003213020, Z151100003715003).
Author information
Authors and Affiliations
Contributions
Z. Chu performned most the experiments and data analysis with help from H. Shi, W. Shi and M. PourhosseiniAsl; J. Wu, X. Gao and X. Yuan performed the materials fabrication and analysis about the interfacial structure of our proposed magnetoelectric flux gate sensor, S. Dong dircted and advised this research. S. Dong and Z. Chu wrote the manuscript with the input from all the authors. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing Interests
The authors declare that they have no competing interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Chu, Z., Shi, H., PourhosseiniAsl, M.J. et al. A magnetoelectric flux gate: new approach for weak DC magnetic field detection. Sci Rep 7, 8592 (2017). https://doi.org/10.1038/s41598-017-09420-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-017-09420-w
This article is cited by
-
A Rotating-Coil Magnetometer for Scanning Transversal Field Harmonics in Accelerator Magnets
Scientific Reports (2019)
-
Enhanced magnetoelectric voltage in ferrite/PZT/ferrite composite for AC current sensor application
Journal of Materials Science: Materials in Electronics (2018)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
