
Abstract
In recent years, there has been a growing interest in developing and evaluating gait analysis algorithms based on inertial measurement unit (IMU) data, which has important implications, including sports, assessment of diseases, and rehabilitation. Multi-tasking and physical fatigue are two relevant aspects of daily life gait monitoring, but there is a lack of publicly available datasets to support the development and testing of methods using a mobile IMU setup. We present a dataset consisting of 6-minute walks under single- (only walking) and dual-task (walking while performing a cognitive task) conditions in unfatigued and fatigued states from sixteen healthy adults. Especially, nine IMUs were placed on the head, chest, lower back, wrists, legs, and feet to record under each of the above-mentioned conditions. The dataset also includes a rich set of spatio-temporal gait parameters that capture the aspects of pace, symmetry, and variability, as well as additional study-related information to support further analysis. This dataset can serve as a foundation for future research on gait monitoring in free-living environments.
Similar content being viewed by others


Background & Summary
Gait analysis is an essential part of mobility assessment to support the diagnosis, treatment, or rehabilitation, both for injuries and diseases. Clinical gait analyses are usually performed under controlled laboratory conditions, typically using multi-camera or instrumented walkways1,2. However, gait characteristics differ between daily life settings and controlled laboratory environments3,4. Inertial measurement unit (IMU) based methods enable mobile gait analysis in free-living environments. In recent years, there has been a growing interest in developing and evaluating gait analysis algorithms based on IMU data, which has important implications for sports science, biomechanics and rehabilitative medicine5.
This dataset aims to contribute to the development of methods for recognizing gait modulations in daily life settings. Daily life walking often occurs while concurrently performing additional tasks, such as walking while talking on the phone. Although walking is generally considered an isolated and automatic process, there is evidence that performing a secondary task during walking (i.e., dual-task condition) significantly changes the gait pattern, indicated by a decrease in walking speed and an increase in gait variability6,7,8,9. Physical fatigue is another relevant factor in daily life walking. There is evidence that muscle fatigue has a negative impact on static and dynamic balance, which increases the risk of injury and/or falls in healthy adults10 as well as in vulnerable populations (e.g., elderly or neurological disease patients)11,12. Understanding gait modulation mechanisms using dual-task and fatigue scenarios and being able to recognize the changes in gait characteristics are crucial to enabling daily life gait monitoring.
Despite the high relevance of recognizing gait modulations in dual-task settings and in fatigued conditions using mobile sensors, few datasets have been made publicly available to allow the testing and development of algorithms. Moreover, the combination and interaction of physical fatigue and secondary (cognitive) task performance is prominent in real-life settings but less investigated. Table 1 summarizes studies that collected walking data under dual-task or fatigue conditions using IMUs. Most of the datasets consist of recordings with only one or two IMUs and short durations of walking, and none of the datasets are publicly available. To fill this gap, here we present the dataset DUO-GAIT: A Gait Dataset for Walking under Dual-Task and Fatigue Conditions. This dataset contains recordings of 6-minute walks under single (only walking) and dual-task conditions (walking while performing a cognitive task) conditions in an unfatigued (control condition) and fatigued state from 16 healthy young adults. In particular, nine IMUs were placed on the head (HE), chest (sternum, ST), lower back (sacrum, SA), left and right wrists (LW and RW), left leg and right leg (LL and RL) as well as left and right feet (LF and RF) to record tri-axial acceleration and angular velocity. The unique multi-sensor setup opens up many possibilities to re-use this dataset. These sensor placements can be used independently or in custom combinations for typical IMU gait analysis algorithms quantifying foot movement13,14, arm swing15,16 or for full-body pose estimation17. In addition, the dataset also includes a rich set of spatio-temporal gait parameters calculated from the IMU data, such as stride length, speed, and their coefficients of variation and symmetry values. Apart from the gait-related data, participant demographics, physiological data such as the blood lactate concentrations and heart rate as objective indicators of fatigue, and transcripts of the responses from the cognitive task are also included in this dataset for further exploration and analysis.
In summary, the presented dataset contributes to the testing and development of methods for recognizing gait modulations using a mobile IMU setup. We anticipate that this dataset will be used for future research on gait monitoring in free-living environments.
Methods
Study participants
Sixteen healthy adults (eight males, eight females) aged 21 to 35 years were recruited for this study. All participants were free of any neuromuscular or cardiovascular diseases and did not perform strenuous physical exercises 48 hours prior to the data collection. The Physical Activity Readiness Questionnaire (PAR-Q) was used to further determine study eligibility. Participants who answered “yes” to any of the questions (i.e., indicating limitations for performing physical exercise) were excluded from the study. The International Physical Activity Questionnaire (IPAQ, short form) was used to assess the levels of physical activity in the daily life of the participants. Table 2 summarizes participant characteristics.
Experimental design
The experimental design consisted of two visits (referred to as visits A and B in the following text) that were seven days apart and randomized for each participant. To control for the effects of circadian rhythms on physical performance, the times of the two visits were less than an hour apart for the same participant. During visit A, participants watched a relaxing nature documentary for 5–10 minutes, and the experimenter measured blood lactate concentration using blood samples from the earlobe twice within an interval of 5–10 minutes. Subsequently, the participants performed two 6-minute walking sessions before and after a muscle fatigue protocol. During the 6-minute walking sessions, the participants were asked to walk at their self-selected walking speed up and down a hallway with a 35 m one-way distance. During the fatigue protocol, the participants wore a weighted vest matched to 30% of their body mass, and repeatedly stood up from a chair and sat back down until they were not able to continue. The task was performed at a self-selected, fast pace. Immediately after the fatigue protocol, blood lactate concentration was measured again, and the participants reported their perceived fatigue level on the Borg Rating of Perceived Exertion (RPE) scale (referred to as “Borg scale” in the following text)18,19. The procedure during visit B was identical to that of visit A, except that while walking, the participants performed a secondary cognitive task which involved the continuous subtraction of seven from a random 4-digit starting number (between 3000 and 9000) provided by the experimenter. Participants had to speak out the numbers so that we were able to record and analyze their responses. To reduce learning effects, participants practiced the dual-task 6-minute walk one time before the actual data recording. In total, four walking sessions were recorded for each participant: single-task control (ST-Control), single-task fatigue (ST-Fatigue), dual-task control (DT-Control), and dual-task fatigue (DT-Fatigue). Figure 1 provides an overview of the study design.

Study design. Visits A and B are randomized for each participant.
Recording devices
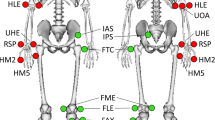
Nine IMU devices (Physilog®5, Gait Up, Switzerland) were attached to the head (HE), chest (sternum, ST), lower back (sacrum, SA), left and right wrists (LW and RW), left and right legs (LL and RL) as well as left and right feet (LF and RF) of the participants. The IMUs were synchronized before the start of recording. Tri-axial acceleration (range: ±16 g) and angular velocity (range: ±1000 degrees/s) data were recorded at a sampling rate of 128 Hz. A heart rate sensor (Polar H10, Polar, Finland) was attached to the chest (below the sternum) to record the heart rate. During each visit, the IMUs and the heart rate sensor continuously recorded data from the start of the first walking session until the end of the second walking session. The chest IMU was removed during the fatigue protocol to allow proper positioning of the weighted vest. An audio recorder was attached close to the left collar bone for both visits A and B, and recorded responses from the number subtraction task during visit B (dual-task condition). Figure 2 shows the experimental setup.

Experimental setup. Left: sensor placements and orientations. Right: sit-to-stand fatigue protocol.
The study was approved by the ethics committee of the University of Potsdam (63/2020) and all experimental procedures were in accordance with the latest revision of the Declaration of Helsinki. All participants provided written consent prior to the data collection.
Data processing
For each visit, the IMU signals were segmented into three parts: the 6-minute walk under control conditions (ST-Control or DT-control), the fatigue protocol and the 6-minute walk under fatigued conditions (ST-Fatigue or DT-Fatigue) by visual examination of the IMU signals. Spatio-temporal gait parameters were extracted from walking segments using an algorithm that has been validated in previous studies13,14. Briefly, the algorithm takes tri-axial acceleration and angular velocity data as input, uses an error-state Kalman filter, which utilizes zero-velocity update to track errors in the sensor signal during stance periods of the foot, and estimates the 3D movement trajectory of the foot. Foot-off and initial contact events are identified using features from the angular velocity data. Temporal parameters, such as stride time and stance time, are calculated directly from the gait events. Spatial parameters, such as stride length and clearance, are calculated by segmenting the 3D foot trajectories using the gait events. Subsequently, outlier strides were identified and excluded from further analyses using the following steps: turning strides at the ends of the walkway were identified using a manual threshold on the change of foot orientation, acceleration, and deceleration strides were identified as two strides before and after the turning strides, interrupted strides (when the participants were disturbed during the 6-minute walk) were excluded using manually documented timestamps. Additional outlier strides were identified using a z-score threshold at three and excluded for further analyses. The stride-by-stride gait parameters from each participant and each foot were then aggregated into mean and coefficient of variation (CV, defined as the ratio between standard deviation and mean). In addition, gait parameters from both feet of each participant were aggregated into mean, CV, and symmetry index (SI). The symmetry index is defined as in Eq. 1, where XLF and XRF are the mean gait parameters of the left and right foot, respectively.:
Data Records
The dataset can be downloaded at the Zenodo platform20. The dataset is divided into three top-level folders “raw”, “interim”, and “processed” as illustrated in Fig. 3. The “raw” folder contains the raw IMU recordings, heart rate recordings, transcripts of responses from the number subtraction cognitive task, responses from the IPAQ questionnaire, and demographic and anthropological information. Raw IMU data and heart rate data were continuously recorded from the start of the first walking session to the end of the second walking session, resulting in one recording for each visit and each participant. Therefore, the “OG_st_raw” folder contains the data from the entire single task visits (i.e., ST-Control and ST-Fatigue) and the “OG_dt_raw” folder contains the data from the entire dual task visits (i.e., DT-Control and DT-Fatigue) for each participant. The IMU data were saved in.csv format, which was extracted from the original binary (.BIN) format using the Physilog RTK software. Heart rate data and transcripts of cognitive task responses were saved in.csv format. Due to technical issues, heart rate data from two recording sessions (out of 32 recording sessions for all participants and visits) are not available.

Data Structure. The dataset has three top-level folders: “raw,” “interim,” and “processed”. The “raw” folder contains continuous recordings of the entire walking sessions from the IMU devices and the heart rate sensor, as well as additional information such as cognitive task transcripts, IPAQ questionnaire responses, and demographics. The “interim” folder contains IMU data segmented into individual 6-minute walking sessions and the sit-to-stand fatigue exercise. The “processed” folder contains spatio-temporal gait parameters calculated from the feet IMU data.
The “interim” folder includes IMU data that were manually segmented into the two walking sessions and the sit-to-stand fatigue protocol for each visit by visual inspection of raw IMU signals. For quality control, the segmented accelerometer and gyroscope data of each sensor was plotted, resulting in 18 plots per participant. In addition, during the first execution of gait parameter extraction, calculated 3D feet trajectories were cached in the “interim” folder, so that for future executions, the cached trajectories can be loaded directly, sparing the computational efforts for re-calculation. The file “interruptions.csv” documents time periods where the walk was briefly interrupted, for example, when a second person enters the walking area. The strides during the interrupted time periods were marked as outliers and removed from subsequent analyses. The file “stance_magnitude_thresholds_manual.csv” documents the angular velocity thresholds used to identify stance phases for the gait analysis algorithm for each participant. The thresholds were determined by visual observation of the angular velocity signals.
The “processed” folder contains stride-by-stride spatio-temporal gait parameters extracted for each of the four walking conditions, and aggregated gait parameters in terms of coefficients of variation and symmetry for all walking conditions for each participant.
Technical Validation
Technical validation of the IMU data
In our previous study, we performed technical validation on the raw data quality by comparing seven different IMU models13. The IMU model Physilog®5 exhibited the best overall data quality and was therefore selected for creating the present dataset. Our other previous study also validated the gait analysis algorithm used to extract the spatio-temporal gait parameters for this dataset using two independent reference systems21. The results demonstrate the high quality of both the IMU raw data and the extracted gait parameters, with root mean square error of 0.05 m for stride length and 0.02 s for stride time.
Effectiveness of fatigue and dual-task protocols
The Borg scale and blood lactate measurements both confirm that all participants were fatigued after performing the sit-to-stand protocol, as illustrated in Fig. 4. All participants reported ratings of perceived exertion (RPE) values larger than 15.5 on the Borg scale. For all participants, the average blood lactate concentrations at baseline (averaged across two measurements for each person and visit) were below 2 mmol/L, which is in agreement with previously reported levels at rest22. After the fatigue protocol, the blood lactate concentration increased significantly for all participants, indicating muscle fatigue23. There were no significant differences between ST and DT conditions for both Borg scale (p = 0.76) and blood lactate level after the fatigue protocol (p = 0.92), indicating that the fatigue levels during the two visits are comparable.

All participants reached sufficient levels of fatigue, as confirmed by Borg Rating of Perceived Exertion Scale (left) and blood lactate level (right). Fatigue levels after the sit-to-stand protocol are comparable for both single-task and dual-task visits. ST: single-task, DT: dual-task, Lac: blood lactate concentration.
Dual-task costs (DTC, %) were used to assess the effects of dual-task walking on gait characteristics24. DTC describes the change of a gait parameter between single- and dual-task walking, and is defined as in Eq. 2:
where X is the gait parameter of interest, XST and XDT represent the parameter (averaged value of the left and right foot) under the single-task and dual-task walking conditions, respectively. Dual-task costs of example gait parameters are summarized in Table 4.
Statistical summary of raw IMU data
To validate the completeness of the collected data, we present statistical parameters for the acceleration and angular velocity (gyroscope) data as an example. Since all IMUs are synchronized and the recordings are started and stopped simultaneously, the recording duration is identical among all IMUs in the same recording session. Table 3 summarizes the statistical parameters for different recording segments. The recordings “ST Full Recording” and “DT Full Recording” are the original non-segmented recordings from the entire single-task or dual-task visits, which include the baseline 6-minute walk (non-fatigued condition), the sit-to-stand fatigue protocol, and the 6-minute walk in a fatigued state. The recordings “ST-Control”, “ST-Fatigue”, “DT-Control” and “DT-Fatigue” are recording segments of only the 6-minute walks under the respective conditions. The recording durations of these recordings are all above six minutes, confirming that all participants completed the 6-minute walking sessions and the data was complete. The recordings “ST Fatigue Protocol” and “DT Fatigue Protocol” are recording segments of only the sit-to-stand fatigue protocol. The amount of data indicates that all participants performed the exercise, and the effectiveness of the exercise in inducing physical fatigue is confirmed by results in the section “Effectiveness of Fatigue and Dual-task Protocols”. The magnitude of acceleration (Acc. Magnitude) and angular velocity (Gyro. Magnitude) are also within the expected range for walking and squat-like exercises for the respective sensor placements. In addition, all raw IMU signals have been visually inspected to ensure data quality.
Statistical summary of gait parameters
Since all participants successfully completed the 6-minute walk sessions, the amount of data is balanced for all participants and the four walking conditions. In total, seven temporal and spatial stride-by-stride gait parameters (stride length, minimum clearance, maximum clearance, stride time, stance time, swing time and stance ratio) and 27 aggregated parameters (mean, coefficient of variation and symmetry index for speed, cadence, stride length, minimum clearance, maximum clearance, stride time, stance time, swing time and stance ratio) were calculated from the IMU data. In studies investigating the effects of fatigue or dual-task walking on gait performance, stride length and walking speed are among the most reported gait parameters8,11. As an example, we summarized these parameters from our dataset. The mean stride length of 1.32 m to 1.44 m and the mean speed of 1.15 m/s to 1.30 m/s are within the normal range for healthy young adults reported in other studies25. Moreover, the algorithm used to calculate these gait parameters has been validated against gold standard reference systems in previous studies13. Table 4 summarizes the total number of strides, stride length, speed in each walking session, and dual-task costs under control or fatigue conditions.
In addition, using stride length and speed as an example, we performed two-way repeated measures ANOVA to investigate the ability of these gait parameters to distinguish walking under fatigue and unfatigued states, as well as under single- and dual-task conditions. The main effect of fatigue is significant (p < 0.05) for stride length (F(1,15) = 6.62, p = 0.02, η2 = 0.01), but not for speed (F(1,15) = 0.70, p = 0.41, η2 = 0.003). The main effect of dual-task is significant (p < 0.05) both for stride length (F(1,15) = 17.03, p = 8.95 × 10−4, η2 = 0.14) and speed (F(1,15) = 23.75, p = 2.05 × 10−4, η2 = 0.31). Detailed results of the statistical tests are summarized in Table 5. No significant interaction effects between fatigue and dual-task were found. The results indicate that the change in gait patterns induced by dual-tasking is much larger than the change induced by fatigue. Our recently published study explores this aspect in more detail and demonstrates how the effects of fatigue on gait patterns can be investigated in depth26.
Usage Notes
Depending on the research question, each of the three data subsets (raw, intermediate, and processed) can be used independently or selectively combined for further analysis. The raw IMU signals from the entire recording sessions can be potentially used for developing and validating algorithms for recognizing walking bouts27. More generally, the data can also be used with segmentation algorithms28 and time-series motif identification algorithms29 to recognize different daily-life activities from wearable devices.
The raw IMU signals during walking can be further processed into clinically-relevant parameters for quantifying gait. Our dataset provides a rich set of data from different IMU body placements to capture the gait characteristics. Typical sensor placements used for such analyses include: using feet or lower back IMUs to extract gait parameters such as stride length, stride time, walking speed, symmetry and variation13,14,30, using wrist IMUs to quantify arm swing angles15,16, or using a sparse IMU combination (head, lower back, wrists, legs) to obtain full-body joint angles and pose estimation17. These clinically-relevant parameters can then be used to evaluate gait classification algorithms. Multiple IMU placements from this dataset enable identification of optimal minimized sensor setup for daily life gait monitoring31. In addition, the raw IMU signals during the fatigue protocol can be combined with the heart rate data, the Borg scale of perceived exertion and the blood lactate concentration to study exercise-related kinematics and its effects on fatigue levels32.
The gait parameters provided in this dataset can be used for developing gait classification and visualization methods for refined gait changes33. The demographic and anthropometrical characteristics included in the dataset (raw/subject_info.csv) help to further analyze the data. For example, to identify changes in gait patterns caused by fatigue or dual-task performance, the gait parameters could be normalized to the body height or leg length of each person.
For researchers who intend to use their custom gait analysis algorithms to extract the gait parameters for further analyses, it is important to first evaluate the quality of the extracted gait parameters. We have previously published our gait analysis pipeline along with a dataset to validate the quality of the calculated gait parameters against two independent reference systems21. The pipeline was built in a modular way so that new algorithms could be inserted and tested using the accompanying dataset.
Limitations and future works
This dataset consists of data obtained from young healthy participants using nine different IMU placements to capture the whole body gait changes. These data serve as a valuable resource for exploring methods to analyze gait changes induced by physical fatigue and cognitive task performance. However, it is important to note that to increase the dataset’s usefulness for specific target groups, further studies are required to collect data from diverse populations that are more susceptible to external factors affecting their gait stability, such as the elderly or patients with neurological diseases or movement disorders. For a more comprehensive understanding of the gait changes, additional data modalities should be incorporated, including electromyography (EMG) and force data from pressure sensors. Continuous recordings of various daily life activities at home are also of interest for research on mobility-related issues.
Code availability
All data processing procedures described in this paper were performed using Python 3.7. The code repository and more detailed usage instructions can be found at https://github.com/HPI-CH/fatigue-dual-task-data. The main functionalities of the code are as follows:
• Segment the IMU recordings into walking sessions and fatigue exercise
• Calculate spatio-temporal gait parameters from the IMU signals
• Summarize gait parameters and other study-related information
References
Kainz, H. et al. Reliability of four models for clinical gait analysis. Gait & posture 54, 325–331 (2017).
Dusing, S. C. & Thorpe, D. E. A normative sample of temporal and spatial gait parameters in children using the gaitrite electronic walkway. Gait & posture 25, 135–139 (2007).
Carcreff, L. et al. Comparison of gait characteristics between clinical and daily life settings in children with cerebral palsy. Scientific reports 10, 2091 (2020).
Renggli, D. et al. Wearable inertial measurement units for assessing gait in real-world environments. Frontiers in physiology 11, 90 (2020).
Picerno, P. et al. Wearable inertial sensors for human movement analysis: a five-year update. Expert Review of Medical Devices 0, 1–16 (2021).
Ebersbach, G., Dimitrijevic, M. R. & Poewe, W. Influence of concurrent tasks on gait: A dual-task approach. Perceptual and Motor Skills 81, 107–113 (1995).
Nohelova, D., Bizovska, L., Vuillerme, N. & Svoboda, Z. Gait variability and complexity during single and dual-task walking on different surfaces in outdoor environment. Sensors 21, 4792 (2021).
Smith, E., Cusack, T. & Blake, C. The effect of a dual task on gait speed in community dwelling older adults: A systematic review and meta-analysis. Gait & Posture 44, 250–258 (2016).
Montero-Odasso, M., Muir, S. W. & Speechley, M. Dual-task complexity affects gait in people with mild cognitive impairment: the interplay between gait variability, dual tasking, and risk of falls. Archives of physical medicine and rehabilitation 93, 293–299 (2012).
Parijat, P. & Lockhart, T. E. Effects of lower extremity muscle fatigue on the outcomes of slip-induced falls. Ergonomics 51, 1873–1884 (2008).
Santos, P. C. R. D. et al. Effects of experimentally induced fatigue on healthy older adults’ gait: A systematic review. PloS one 14, e0226939 (2019).
Hatton, A. L., Menant, J. C., Lord, S. R., Lo, J. C. & Sturnieks, D. L. The effect of lower limb muscle fatigue on obstacle negotiation during walking in older adults. Gait & posture 37, 506–510 (2013).
Zhou, L. et al. How we found our imu: Guidelines to imu selection and a comparison of seven imus for pervasive healthcare applications. Sensors 20, 4090 (2020).
Tunca, C. et al. Inertial sensor-based robust gait analysis in non-hospital settings for neurological disorders. Sensors 17, 825 (2017).
Warmerdam, E. et al. Quantification of arm swing during walking in healthy adults and parkinson’s disease patients: Wearable sensor-based algorithm development and validation. Sensors 20, 5963 (2020).
Hejrati, B., Merryweather, A. S. & Abbott, J. J. Generating arm-swing trajectories in real-time using a data-driven model for gait rehabilitation with self-selected speed. IEEE Transactions on Neural Systems and Rehabilitation Engineering 26, 115–124 (2017).
Huang, Y. et al. Deep inertial poser: Learning to reconstruct human pose from sparse inertial measurements in real time. ACM Transactions on Graphics (TOG) 37, 1–15 (2018).
Williams, N. The borg rating of perceived exertion (rpe) scale. Occupational Medicine 67, 404–405 (2017).
Borg, G. Borg’s perceived exertion and pain scales. (Human kinetics, 1998).
Zhou, L., Fischer, E., Brahms, C. M., Granacher, U. & Arnrich, B. Duo-gait: A gait dataset for walking under dual-task and fatigue conditions with inertial measurement units. Zenodo https://doi.org/10.5281/zenodo.7415758 (2023).
Trautmann, J. et al. Tripod–a treadmill walking dataset with imu, pressure-distribution and photoelectric data for gait analysis. Data 6, 95 (2021).
Miller, B. F. et al. Lactate and glucose interactions during rest and exercise in men: effect of exogenous lactate infusion. The Journal of physiology 544, 963–975 (2002).
Finsterer, J. Biomarkers of peripheral muscle fatigue during exercise. BMC musculoskeletal disorders 13, 1–13 (2012).
McDowd, J. M. The effects of age and extended practice on divided attention performance. Journal of gerontology 41, 764–769 (1986).
Bernal, A. G. Becerro-de Bengoa-Vallejo, R. & Losa-Iglesias, M. E. Reliability of the optogait portable photoelectric cell system for the quantification of spatial-temporal parameters of gait in young adults. Gait & posture 50, 196–200 (2016).
Zhou, L., Fischer, E., Brahms, C. M., Granacher, U. & Arnrich, B. Using transparent neural networks and wearable inertial sensors to generate physiologically-relevant insights for gait. In 2022 21st IEEE International Conference on Machine Learning and Applications (ICMLA), 1274–1280 (IEEE, 2022).
Atrsaei, A., Dadashi, F., Mariani, B., Gonzenbach, R. & Aminian, K. Toward a remote assessment of walking bout and speed: application in patients with multiple sclerosis. IEEE Journal of Biomedical and Health Informatics 25, 4217–4228 (2021).
Ermshaus, A., Schäfer, P. & Leser, U. Clasp: parameter-free time series segmentation. Data Mining and Knowledge Discovery 37, 1262–1300 (2023).
Schäfer, P. & Leser, U. Motiflets - simple and accurate detection of motifs in time series. Proceedings of the VLDB Endowment 16, 725–737 (2022).
Czech, M. D. & Patel, S. Gaitpy: an open-source python package for gait analysis using an accelerometer on the lower back. Journal of Open Source Software 4, 1778 (2019).
O’Day, J. et al. Assessing inertial measurement unit locations for freezing of gait detection and patient preference. Journal of neuroengineering and rehabilitation 19, 1–15 (2022).
Albert, J. A., Herdick, A., Brahms, C. M., Granacher, U. & Arnrich, B. Using machine learning to predict perceived exertion during resistance training with wearable heart rate and movement sensors. In 2021 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), 801–808 (IEEE, 2021).
Tunca, C., Salur, G. & Ersoy, C. Deep learning for fall risk assessment with inertial sensors: Utilizing domain knowledge in spatio-temporal gait parameters. IEEE journal of biomedical and health informatics 24, 1994–2005 (2019).
Ibrahim, A. A. et al. Inertial sensor-based gait parameters reflect patient-reported fatigue in multiple sclerosis. Journal of neuroengineering and rehabilitation 17, 1–9 (2020).
Lamooki, S. R., Kang, J., Cavuoto, L. A., Megahed, F. M. & Jones-Farmer, L. A. Challenges and opportunities for statistical monitoring of gait cycle acceleration observed from imu data for fatigue detection. In 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), 593–598 (IEEE, 2020).
Ibrahim, A. A. et al. Short inertial sensor-based gait tests reflect perceived state fatigue in multiple sclerosis. Multiple Sclerosis and Related Disorders 58, 103519 (2022).
Zhang, J., Lockhart, T. E. & Soangra, R. Classifying lower extremity muscle fatigue during walking using machine learning and inertial sensors. Annals of biomedical engineering 42, 600–612 (2014).
Zhang, G. et al. Identifying fatigue indicators using gait variability measures: a longitudinal study on elderly brisk walking. Sensors 20, 6983 (2020).
Romijnders, R. et al. Validation of imu-based gait event detection during curved walking and turning in older adults and parkinson’s disease patients. Journal of neuroengineering and rehabilitation 18, 1–10 (2021).
de Souza Fortaleza, A. C. et al. Dual task interference on postural sway, postural transitions and gait in people with parkinson’s disease and freezing of gait. Gait & posture 56, 76–81 (2017).
Jiménez-Grande, D., Atashzar, S. F., Devecchi, V., Martinez-Valdes, E. & Falla, D. A machine learning approach for the identification of kinematic biomarkers of chronic neck pain during single-and dual-task gait. Gait & Posture 96, 81–86 (2022).
Martínez-Ramírez, A. et al. Dual task gait performance in frail individuals with and without mild cognitive impairment. Dementia and geriatric cognitive disorders 42, 7–16 (2016).
Soulard, J., Vaillant, J., Balaguier, R. & Vuillerme, N. Spatio-temporal gait parameters obtained from foot-worn inertial sensors are reliable in healthy adults in single-and dual-task conditions. Scientific Reports 11, 1–15 (2021).
Zhou, Y. et al. Classification of neurological patients to identify fallers based on spatial-temporal gait characteristics measured by a wearable device. Sensors 20, 4098 (2020).
Acknowledgements
The authors would like to thank all participants of the study. We also thank Justin Albert and Torsten Rackoll for their help with drafting the ethics proposal, Arnd Gebel, Kristina Kirsten, Sarah Wernicke and Jonas Chromik for supporting the development of the study and data collection protocol, and Orhan Konak for proofreading. This work has been partly funded by the Federal Ministry of Education and Research of Germany in the framework of KI-LAB-ITSE (project number 01IS19066) and the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) with project number 491466077.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
L.Z., C.M.B., U.G. and B.A. conceived the experiment(s), L.Z. and E.F. conducted the experiment(s), L.Z. and E.F. analyzed the results. All authors reviewed the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhou, L., Fischer, E., Brahms, C.M. et al. DUO-GAIT: A gait dataset for walking under dual-task and fatigue conditions with inertial measurement units. Sci Data 10, 543 (2023). https://doi.org/10.1038/s41597-023-02391-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41597-023-02391-w
