
Abstract
Land subsidence in cities along the northern coastline of Java has been at a worrying level. Monitoring efforts using geodetic data reveal that Jakarta, Pekalongan, Semarang, and Demak subside at least ~9x faster than the present-day rate of global sea level rise, which affects the cities’ future urban viability. In this study, we publish a time series of the precise 3D displacements observed by twenty continuous Global Navigation Satellite System (GNSS) stations between 2010 and 2021. These are the first open-to-the-public and rigorously processed GNSS datasets that are useful for accurately quantifying land subsidence in the densely populated sinking cities in Java. The data also provides a way to tie other geodetic observations, such as Interferometric Synthetic Aperture Radar (InSAR), to a global reference frame in an attempt to build worldwide observations of coastal land subsidence.
Similar content being viewed by others

Background & Summary
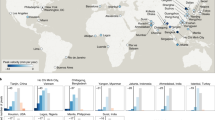
The northern coastline regions of Java have been soliciting the attention of many studies because a large portion of land in at least ten cities is subsiding1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18 (Fig. 1). The subsiding land has been triggered by a wide range of natural and anthropogenic activities, such as the compaction of sediments in Pekalongan, Semarang, and Demak19,20, gas extraction in Sidoarjo16, and structural loadings in Jakarta1. In addition, excessive groundwater extraction is the most significant triggering factor due to the increasing demand and need for residential and industrial water supply2,16,21,22,23,24. In these cities, the impacts of land subsidence such as widespread coastal inundation and structural damage to buildings, have been significantly reducing the quality of the living environment1,2,5,14,17,20,25,26,27. In Jakarta, the capital city of Indonesia, land subsidence is so severely affecting the city’s future urban viability28 that government authorities are planning to move the capital to Borneo29.

Monitoring efforts to study the spatial extent of land subsidence and its rates in these cities have been continuously made using land-based and space-borne techniques1,2,3,4,6,7,8,9,10,11,15,16,27,30. Out of the ten cities, land subsidence in Jakarta and Semarang has been the most intensively studied with a long monitoring history. In Jakarta, levelling surveys and campaign GNSS measurements between 1982 and 2010 estimate that the rates are from 1 to 28 cm/year1. A recent study using Sentinel-1 InSAR data between 2014 and 2020 estimates that the rates are from 1 to ~11 cm/year7,8. Different rates between the past and recent monitoring efforts have also been observed in Semarang: GNSS measurements between 1999 and 2011 estimate that the rates are from 14 to 19 cm/year2, while a recent study using Sentinel-1 InSAR data between 2015 and 2020 reveals that the rates are from 2 to 3 cm/year8.
Besides Jakarta and Semarang, land subsidence monitoring efforts using InSAR data in the remaining cities have been rapidly growing since 20133,4,6,9,11,16,31,32,33 thanks to the availability of open access SAR data from the Copernicus Sentinel-1 satellites operated by the European Space Agency. On the contrary, since 2013, the monitoring efforts using campaign GNSS measurements have been lacking; the latest measurements were in 2010 for Jakarta1, in 2017 for Semarang12, and in 2018 for Demak10. Even worse, no study reported GNSS-based monitoring efforts in other cities that are known to experience land subsidence, such as Bekasi, Subang, Pekalongan, and Surabaya. This lack of GNSS-based monitoring efforts is worrying because the GNSS data is still needed for several reasons.
First, although InSAR observations provide all-weather and day-night monitoring capacity at high spatial coverage and resolution34,35, InSAR accuracy may still be degraded by various noise sources such as atmospheric phase delays, satellite orbit uncertainty, and unwrapping errors36,37. The degraded accuracy may mislead the interpretation of the subsidence rate. Incorporating independent data from GNSS measurements can help mitigate the false interpretation38,39. Second, InSAR velocity maps are relative to a reference point within the SAR data footprints. In areas where GNSS data is not available, a common approach to select a reference point is by assuming a certain area to be stable. However, this approach is subjective and may result in varying InSAR velocity maps across different studies. For example, Tay et al.7 showed that a location on the northern coastline of Jakarta subsides ~7x faster than that reported by Wu et al.8. One possible explanation for this discrepancy is the use of different reference points. Therefore, GNSS data is necessary to provide a priori information for selecting a stable reference point. Third, InSAR velocity maps are 1D measurements of surface deformations in the radar line-of-sight direction of SAR satellites34,35. In the case of land subsidence monitoring where vertical motions are of interest, other data sets such as GNSS observations are needed to isolate the vertical motions precisely (e.g.40,41,42,43). Fourth, Shirzaei et al.44 suggest the need for incorporating geocentric global reference frame vertical land motion (VLM) into global mean sea level (GMSL) studies. Geocentric is the natural for a global frame. Therefore, GMSL studies relative to this frame will allow us to determine whether a given location is rising or falling relative to the centre of the Earth. The InSAR-based VLM measurements are ideal for this purpose because InSAR data provide global coverage observations. However, the main challenge is that InSAR results are provided in a local reference frame. Thus, establishing worldwide InSAR-based VLM measurements needs GNSS data to tie the VLM measurements into a global reference frame44. In this study, we publish a time series of 3D displacements observed at twenty continuous GNSS stations between 2010 and 2021 along the northern coastline regions of Java (Fig. 1). The data may potentially be used for all the purposes mentioned above.
Observation specifications
We obtain the Receiver Independent Exchange (RINEX) GNSS data from the Geospatial Information Agency of Indonesia (BIG) which has been establishing and maintaining continuous GNSS stations in the country since 1996. Most stations are located on the national telecommunication company network. The stations use different monument types (Fig. 2) and record data continuously at one sample per second using high-precision L1/L2 geodetic type receivers and standard Choke Ring antennas (Table 1). In addition, the stations also have meteorological instrument systems, an automatic battery charger that connects to the national power network, and a cell modem (Fig. 3) that will stream the recorded raw data via a secure TCP/IP connection to BIG’s data processing centre in Cibinong, West Java up to one-hour latency.

Monument types of the BIG GNSS stations used in this study.

Components of the BIG GNSS stations.
Methods
We processed the RINEX GNSS data and obtained a time series of GNSS station coordinates using the GPS at MIT/Global Kalman filtering (GAMIT/GLOBK) software package version 10.7145,46,47. Our GPS processing consisted of two steps48,49. In the first step, we used double-differencing methods in the GAMIT software to estimate daily station positions, atmospheric parameters, satellite orbits, and earth orientation parameters from ionosphere-free linear combination GPS phase observations. During this step, we fixed the satellite orbit parameters to the IGS final orbits and applied a second-order ionospheric correction using IGS final ionospheric products. We set the computation parameters to the default GAMIT setting, except for the atmospheric delay parameters, which were modeled and estimated every hour using the Vienna Mapping Function50. We corrected the station displacements due to ocean tides using the most recent global ocean tide model, Finite Element Solution 200451. To adjust the effect of solar and solid-earth tides, we applied the International Earth Rotation and Reference System Service 2010 standard model52 and the atmospheric pressure loading model corrections53. Finally, we included GPS data from 12 International GNSS Services (IGS) stations (ALIC, BAKO, COCO, DARW, DGAR, GUAM, HYDE, IISC, LHAZ, PIMO, XMIS, YARR) in our daily processing to integrate our local network into the ITRF2014 reference frame54.
In the second step, we used the GLOBK software to combine our daily solutions with the global GPS solutions provided by the MIT analysis centre. During this step, we aligned our combined solutions with the ITRF2014 reference frame54 by minimising the position differences of eight selected sites55, using a priori values defined by the IGb14 realisation of ITRF201454. To accomplish this position difference minimation, we calculated six Helmert transformation parameters (three translations and three rotations) of eight selected reference sites: YARR in Australia, MAW1 and DAV1 in Antarctica, STJO and FLIN in North America, WSRT, ONSA, and NOT1 in Europe55. These sites were selected because they are less affected by earthquake deformations and hydrological loading55. Lastly, we generated daily time series coordinates for all the GNSS stations with respect to IGb14 realisation of ITRF201454.
Data Records
The processing results are a time series of 3D displacements from 2010 to 2021, relative to the ITRF2014. Most stations record negative velocities in the vertical component and are likely related to land subsidence (Table 2 and Fig. 4). The time series of the 3D displacements that include horizontal motions can be found in this repository: https://doi.org/10.5281/zenodo.777501656.

Vertical component of the twenty BIG GNSS stations. (a) Negative vertical velocities are likely related to land subsidence. (b) Daily time series of the GNSS vertical component from 2010 to 2021.
Technical Validation
Bad environments (e.g., buildings and trees) that degrade the sky view of the GNSS antenna will reflect and refract satellite signals before arriving at the antenna57. The reflected and refracted signals are called multipath signals which will introduce carrier phase measurement errors and subsequently lead to a positioning error58. A simple approach to inspect the environments surrounding the antenna is by plotting the signal-to-noise ratio (SNR) values measured by the GNSS receivers59. The SNR, like the carrier phase measurement, is also impacted directly by multipath signals and hence can therefore be used as a proxy to assess the environments surrounding the GNSS antenna59,60. Low SNR values indicate a large tracking error59, meaning that multipath objects are present. We plot the SNR values using the L1 data recordings only. We do not use the L2 data due to its encrypted C/A code and the lack of civilian access to the P-code which affects the L2 SNR reliability59. We plot the SNR values as a function of azimuth and elevation angle, both in the time series and sky plot (Figure S1). The SNR plot shows that all the stations have SNR values greater than 30 decibels, indicating good environments surrounding the GNSS stations hence the negative velocities in the vertical component are robust.
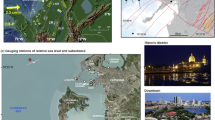
In addition to SNR analysis, we use independent observation measured by a deep pile benchmark to validate the negative velocity at the GNSS CPKL station in Pekalongan (Table 2 and Fig. 4). The benchmark (Fig. 5) was installed by the centre for groundwater and environmental geology, Indonesia’s geological agency, on 17 March 2020 ~500 m northeast of the GNSS CPKL station. The benchmark measurements between 06 April 2021 and 02 October 2022 estimate that ~80 ± 1 mm land subsidence occurs within ~1.5 years (Fig. 5c,d). Unfortunately, we cannot make a one-to-one comparison between this result and the amplitude of land subsidence measured at the GNSS CPKL station due to two reasons: 1) the benchmark and the GNSS CPKL station are ~500 m apart, 2) our GNSS data ended in 2021. Nevertheless, the benchmark measurements are still important in the sense that Pekalongan city is experiencing severe land subsidence.

A deep pile benchmark to measure land subsidence in Pekalongan. (a) A schematic design of the deep pile benchmark. (b) The newly installed benchmark. (c) The benchmark measures 60 ± 1 mm land subsidence by 06 April 2021. (d) The benchmark measures 140 ± 1 mm land subsidence by 02 October 2022, meaning that 80 ± 1 mm land subsidence occurs within ~1.5 years.
Code availability
The GAMIT/GLOBK software we used to process the GNSS data is available at http://geoweb.mit.edu/gg/. The scripts we used to do the SNR analysis are available at https://github.com/ericlindsey/gnss-snr-skyplot.
References
Abidin, H. Z. et al. Land subsidence of Jakarta (Indonesia) and its relation with urban development. Nat. Hazards 59 (2011).
Abidin, H. Z., Andreas, H., Gumilar, I., Sidiq, T. P. & Fukuda, Y. Land subsidence in coastal city of Semarang (Indonesia): Characteristics, impacts and causes. Geomatics, Nat. Hazards Risk 4 (2013).
Mochammad, M. & Saepuloh, A. Analyses of surface deformation with SBAR InSAR method and its relationship with aquifer occurrence in Surabaya City, East Java, Indonesia. in IOP Conference Series: Earth and Environmental Science vol. 71 (2017).
Parwata, I., Ogawara, K., Tanaka, T. & Osawa, T. Land Subsidence Monitoring From ALOS/PALSAR Data By Using D-InSAR Technique In Semarang City, Indonesia. Int. J. Environ. Geosci. 3, 1–9 (2019).
Husnayaen et al. Physical assessment of coastal vulnerability under enhanced land subsidence in Semarang, Indonesia, using multi-sensor satellite data. Adv. Sp. Res. 61 (2018).
Sidiq, T. P. et al. Land Subsidence of Java North Coast Observed by SAR Interferometry. in IOP Conference Series: Earth and Environmental Science vol. 873 (2021).
Tay, C. et al. Sea-level rise from land subsidence in major coastal cities. Nat. Sustain. 5, 1049–1057 (2022).
Wu, P. C., Wei, M. & D’Hondt, S. Subsidence in Coastal Cities Throughout the World Observed by InSAR. Geophys. Res. Lett. 49 (2022).
Yastika, P. E., Shimizu, N. & Abidin, H. Z. Monitoring of long-term land subsidence from 2003 to 2017 in coastal area of Semarang, Indonesia by SBAS DInSAR analyses using Envisat-ASAR, ALOS-PALSAR, and Sentinel-1A SAR data. Adv. Sp. Res. 63 (2019).
Yuwono, B. D., Subiyanto, S., Pratomo, A. S. & Najib, N. Time series of land subsidence rate on coastal demak using gnss cors udip and dinsar. in E3S Web of Conferences vol. 94 (2019).
Aditiya, A., Takeuchi, W. & Aoki, Y. Land Subsidence Monitoring by InSAR Time Series Technique Derived from ALOS-2 PALSAR-2 over Surabaya City, Indonesia. in IOP Conference Series: Earth and Environmental Science vol. 98 (2017).
Andreas, H. et al. On the acceleration of land subsidence rate in Semarang City as detected from GPS surveys. in E3S Web of Conferences vol. 94 (2019).
Aoki, Y. & Sidiq, T. P. Ground deformation associated with the eruption of Lumpur Sidoarjo mud volcano, east Java, Indonesia. J. Volcanol. Geotherm. Res. 278–279 (2014).
Bott, L. M. et al. Land subsidence in Jakarta and Semarang Bay – The relationship between physical processes, risk perception, and household adaptation. Ocean Coast. Manag. 211 (2021).
Bramanto, B., Gumilar, I., Sidiq, T. P., Rahmawan, Y. A. & Abidin, H. Z. Geodetic evidence of land subsidence in Cirebon, Indonesia. Remote Sens. Appl. Soc. Environ. 30, 100933 (2023).
Chaussard, E., Amelung, F., Abidin, H. & Hong, S. H. Sinking cities in Indonesia: ALOS PALSAR detects rapid subsidence due to groundwater and gas extraction. Remote Sens. Environ. 128 (2013).
Gumilar, I. et al. Mapping And Evaluating The Impact Of Land Subsidence In Semarang (Indonesia). Indones. J. Geospasial 2, 26–41 (2013).
Lubis, A. M., Sato, T., Tomiyama, N., Isezaki, N. & Yamanokuchi, T. Ground subsidence in Semarang-Indonesia investigated by ALOS-PALSAR satellite SAR interferometry. J. Asian Earth Sci. 40 (2011).
Sarah, D., Hutasoit, L. M., Delinom, R. M., Sadisun, I. A. & Wirabuana, T. A physical study of the effect of groundwater salinity on the compressibility of the semarang-demakaquitard, Java Island. Geosci. 8 (2018).
Sarah, D., Soebowo, E. & Satriyo, N. A. Review of the land subsidence hazard in pekalongan delta, central java: Insights from the subsurface. Rud. Geol. Naft. Zb. 36 (2021).
Bucx, T. H. M., Van Ruiten, C. J. M., Erkens, G. & De Lange, G. An integrated assessment framework for land subsidence in delta cities. in Proceedings of the International Association of Hydrological Sciences vol. 372 (2015).
Delinom, R. M. et al. The contribution of human activities to subsurface environment degradation in Greater Jakarta Area, Indonesia. Sci. Total Environ. 407 (2009).
Zoysa, R. S. D et al. The ‘wickedness’ of governing land subsidence: Policy perspectives from urban southeast Asia. PLoS ONE 16, https://doi.org/10.1371/journal.pone.0250208 (2021).
Yan, X. et al. Advances and Practices on the Research, Prevention and Control of Land Subsidence in Coastal Cities. Acta Geol. Sin. (English Ed. 94 (2020).
Andreas, H., Pradipta, D., Abidin, H. Z. & Sarsito, D. A. Early pictures of global climate change impact to the coastal area (north west of demak central Java Indonesia). in AIP Conference Proceedings vol. 1857 (2017).
Andreas, H., Zainal Abidin, H., Pradipta, D., Anggreni Sarsito, D. & Gumilar, I. Insight look the subsidence impact to infrastructures in Jakarta and Semarang area; Key for adaptation and mitigation. in MATEC Web of Conferences vol. 147 (2018).
Andreas, H., Abidin, H. Z., Sarsito, D. A. & Pradipta, D. Adaptation of ‘early climate change disaster’ to the northern coast of Java Island Indonesia. Eng. J. 22 (2018).
Takagi, H., Esteban, M., Mikami, T. & Fujii, D. Projection of coastal floods in 2050 Jakarta. Urban Clim. 17 (2016).
Kompas. Presiden Jokowi ungkap alasan mengapa ibu kota RI harus pindah. https://nasional.kompas.com/read/2019/08/26/13475951/presiden-jokowi-ungkap-alasan-mengapa-ibu-kota-ri-harus-pindah (2019).
Abidin, H. Z., Andreas, H., Djaja, R., Darmawan, D. & Gamal, M. Land subsidence characteristics of Jakarta between 1997 and 2005, as estimated using GPS surveys. GPS Solut. 12 (2008).
Anjasmara, I. M., Mauradhia, A. & Susilo. Surface deformation and earthquake potential in Surabaya from GPS campaigns data. in IOP Conference Series: Earth and Environmental Science vol. 389 (2019).
Hakim, W. L., Achmad, A. R., Eom, J. & Lee, C. W. Land Subsidence Measurement of Jakarta Coastal Area Using Time Series Interferometry with Sentinel-1 SAR Data. J. Coast. Res. 102 (2020).
Zaenudin, A., Darmawan, I. G. B., Armijon, Minardi, S. & Haerudin, N. Land subsidence analysis in Bandar Lampung City based on InSAR. in Journal of Physics: Conference Series vol. 1080 (2018).
Burgmann, R., Rosen, P. A. & Fielding, E. J. Synthetic aperture radar interferometry to measure earth’s surface topography and its deformation. Annu. Rev. Earth Planet. Sci. 28 (2000).
Simons, M. & Rosen, P. A. Interferometric Synthetic Aperture Radar Geodesy. in Treatise on Geophysics: Second Edition vol. 3 (2015).
Neely, W. R., Borsa, A. A. & Silverii, F. GInSAR: A cGPS Correction for Enhanced InSAR Time Series. IEEE Trans. Geosci. Remote Sens. 58 (2020).
Zebker, H. A., Rosen, P. A. & Hensley, S. Atmospheric effects in interferometric synthetic aperture radar surface deformation and topographic maps. J. Geophys. Res. Solid Earth 102 (1997).
Kanno, A. & Tanaka, Y. Modified lyzenga’s method for estimating generalized coefficients of satellite-based predictor of shallow water depth. IEEE Geosci. Remote Sens. Lett. 9, 715–719 (2012).
Yalvac, S. Validating InSAR-SBAS results by means of different GNSS analysis techniques in medium- and high-grade deformation areas. Environ. Monit. Assess. 192 (2020).
Hussain, E. et al. Geodetic observations of postseismic creep in the decade after the 1999 Izmit earthquake, Turkey: Implications for a shallow slip deficit. J. Geophys. Res. Solid Earth 121 (2016).
Tong, X., Sandwell, D. T. & Smith-Konter, B. High-resolution interseismic velocity data along the San Andreas Fault from GPS and InSAR. J. Geophys. Res. Solid Earth 118 (2013).
Shen, Z. K. & Liu, Z. Integration of GPS and InSAR Data for Resolving 3-Dimensional Crustal Deformation. Earth Sp. Sci. 7 (2020).
Xu, X., Sandwell, D. T., Klein, E. & Bock, Y. Integrated Sentinel-1 InSAR and GNSS Time-Series Along the San Andreas Fault System. J. Geophys. Res. Solid Earth 126 (2021).
Shirzaei, M. et al. Measuring, modelling and projecting coastal land subsidence. Nature Reviews Earth and Environment 2, https://doi.org/10.1038/s43017-020-00115-x (2021).
Herring, T. A., King, R. W., Floyd, M. A. & McClusky, S. C. GLOBK Reference Manual. Global Kalman filter VLBI and GPS analysis program Release 10.6. 1–95 (2015).
Herring, T. A., King, R. W., Floyd, M. A., Mcclusky, S. C. & Sciences, P. Introduction to GAMIT/GLOBK Release 10.7. 1–168 (2018).
Herring, T. A., King, R. W., Floyd, M. A. & Mcclusky, S. C. GAMIT Reference Manual. GPS Analysis at MIT Release 10.7. 1–168 (2018).
Reilinger, R. et al. GPS constraints on continental deformation in the Africa-Arabia-Eurasia continental collision zone and implications for the dynamics of plate interactions. J. Geophys. Res. Solid Earth 111 (2006).
Koulali, A. et al. New Insights into the present-day kinematics of the central and western Papua New Guinea from GPS. Geophys. J. Int. 202 (2015).
Boehm, J., Werl, B. & Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data. J. Geophys. Res. Solid Earth 111 (2006).
Lyard, F., Lefevre, F., Letellier, T. & Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean Dyn. 56 (2006).
Petit, G. & Luzum, B. IERS Conventions (2010),IERS Technical Note 36. Verlagdes Bundesamts für Kartographie und Geodäsie (2010).
Tregoning, P. & van Dam, T. Atmospheric pressure loading corrections applied to GPS data at the observation level. Geophys. Res. Lett. 32 (2005).
Altamimi, Z., Rebischung, P., Métivier, L. & Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. J. Geophys. Res. Solid Earth 121 (2016).
Tregoning, P. et al. A decade of horizontal deformation from great earthquakes. J. Geophys. Res. Solid Earth 118 (2013).
Susilo, S. et al. The GNSS time series along the northern coastline of Java, Indonesia. Zenodo https://doi.org/10.5281/zenodo.7775016 (2023).
Blewitt, G. GPS and Space-Based Geodetic Methods. in Treatise on Geophysics: Second Edition vol. 3 (2015).
Bilich, A., Larson, K. M. & Axelrad, P. Modeling GPS phase multipath with SNR: Case study from the Salar de Uyuni, Boliva. J. Geophys. Res. Solid Earth 113 (2008).
Bilich, A., Larson, K. M. & Axelrad, P. Observations of Signal-to-Noise Ratios (SNR) at Geodetic GPS Site CASA: Implications for Phase Multipath. Proc. Cent. Eur. Geodyn. Seismol. 23 (2004).
Bilich, A., Axelrad, P. & Larson, K. M. Scientific utility of the signal-to-noise ratio (SNR) reported by geodetic GPS receivers. in 20th International Technical Meeting of the Satellite Division of The Institute of Navigation 2007 ION GNSS 2007 vol. 2 (2007).
Acknowledgements
We thank BIG for providing the RINEX GNSS data. Part of this research is supported by the Earth Observatory of Singapore (EOS) via its funding from the National Research Foundation Singapore and the Singapore Ministry of Education under the Research Centres of Excellence Initiative, the Ministry of Education Singapore under its Academic Research Fund Tier 3 MOE-MOET32021-0002 Award, and National Environment Agency Singapore under the National Sea Level Programme Funding Initiative (Award No. USS-IF-2020-5). I.M. is supported by RISPRO LPDP Indonesia Endowment Fund for Education S-303/LPDP.4/2022. S.S. and Y.A.L.G. are supported by the Disaster Seed Research Grant Program of the National Research and Innovation Agency of the Republic of Indonesia DIPA-124.01.1.690501/2023. This work comprises EOS contribution number 517.
Author information
Authors and Affiliations
Contributions
S.S. and R.S. are the main contributor in conceptualisation, writing, formal analysis, and visualisation. S.S. carried out the GPS processing. Y.A.L.G. and S.Y. contributed to writing. W.H. and R.W. contributed to data validation measured by a deep pile benchmark. S.T.W. contributed to data curation. I.M. involved in discussions.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Susilo, S., Salman, R., Hermawan, W. et al. GNSS land subsidence observations along the northern coastline of Java, Indonesia. Sci Data 10, 421 (2023). https://doi.org/10.1038/s41597-023-02274-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41597-023-02274-0
