
Abstract
Corrosion initiation and propagation are a time-series problem, evolving continuously with corrosion time, and future pitting behavior depends closely on the past. Predicting localized corrosion for corrosion-resistant alloys remains a great challenge, as macroscopic experiments and microscopic theoretical simulations cannot couple internal and external factors to describe the pitting evolution from a time dimension. In this work, a data-driven method based on time-series analysis was explored. Taking cobalt-based alloys and duplex stainless steels as the case scenario, a corrosion propagation model was built to predict the free corrosion potential (Ecorr) using a long short-term memory neural network (LSTM) based on 150 days of immersion testing in saline solution. Compared to traditional machine learning methods, the time-series analysis method was more consistent with the evolution of ground truth in the Ecorr prediction of the subsequent 70 days’ immersion, illustrating that time-series dependency of pitting propagation could be captured and utilized.
Similar content being viewed by others

Introduction
Corrosion initiation and propagation have the characteristics of randomness, dynamics, and the coupling of internal alloy factors and external environmental factors1,2,3,4. This involves the rupture or dissolution of the passive film in corrosive environments, the dissolution rate of the metal on the pitting surface and the dissolved metal at different moments, as well as the diffusion rate of cations in the corrosive solution5,6. These factors jointly influence the local chemical environment and the dynamic evolution of pit morphology with the corrosion time, which in turn determine the design of the material composition and structure. Researchers have carried out numerous experimental and theoretical studies on pitting mechanisms, describing pitting evolution as either discrete and macroscopic or continuous and microscopic7,8,9. From the perspective of alloy service time, pitting initiation and propagation are closely related to the interactions between local corrosion conditions and material structure, which can evolve and accumulate continuously with corrosion time. To date, making accurate predictions of pitting propagation for corrosion-resistant alloys requires capturing past corrosion phenomena to estimate future possibilities, which has remained a great challenge1.
Artificial intelligence (AI) and machine learning (ML) can capture complex relationships between multi-dimension factors and targets; thus, promoting new materials and insight discovery10,11,12,13,14,15. Since the 1980s, researchers have applied artificial neural networks, random forests, and other machine learning algorithms to predict the uniform corrosion of materials and design new corrosion-resistant materials, making notable progress in solving the multi-factor coupling corrosion problem16,17,18,19,20,21. This has helped to predict the corrosion rate of low alloy steel and carbon steel, analyze the important factors that affect the corrosion rate, and forecast the local corrosion behavior of Co-based alloys under different compositions, preparation processes, temperatures, static corrosion environments, and corrosion times22,23,24,25,26. Coelho et al. provides a data-oriented overview of the rapidly growing research field covering ML applied to predicting electrochemical corrosion, which highlights assessing the predictive power of different approaches and elaborate on the current status of regression modeling for various corrosion topics27. Sharma et al. have employed Random Forest method to model measurements of corrosion rates of carbon steel as a function of time when corrosion inhibitors are added in different dosage and dose-schedules28. However, traditional statistical analysis methods, such as support vector machine, random forest and gradient boosting regression default to the assumption of independent and identical distribution among the data samples. For the dynamic process of material service, traditional analysis methods cannot use the inherent time-series relationship between the data samples. Time-series data analysis methods, such as the well-known long short-term memory (LSTM) neural network, can perform dependency mining on sequence data, and learn functions that map a sequence of past observations as an input to output observation29. By introducing input gates, forgetting gates, output gates, and memory units, the information in the memory units can be maintained, updated, or forgotten at different moments to solve the problems of gradient disappearance and sequence dependencies under long-term time series30. Thus, the time-series data analysis method can provide a prospect for the evolution prediction of pitting propagation.
In this work, using cobalt-based alloys and duplex stainless steels as the case scenario, we explored a machine learning method based on the time-series analysis of an LSTM neural network. We constructed a pitting propagation model of free corrosion potential (Ecorr) based on a 150-day immersion test in saline. Traditional machine learning algorithms were compared with the LSTM, which were further applied to estimate the Ecorr of the following 70 days in future immersion. The LSTM model was more consistent with the evolution trend of the ground truth outlined by experimentation, illustrating that the time-series analysis method could capture the sequence dependencies of pitting propagation under a long-term time series attributed to the network structure. This may pave a promising approach for other material services and lifetime behavior predictions.
Results and discussion
Machine learning strategy
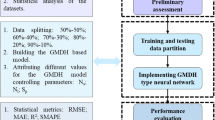
The machine learning strategy starts with data collection, goes through sequence transformation, time-series analysis, and finally predicts future pitting behavior (Fig. 1). The whole dataset was prepared by long-time immersion for four different alloys of Stellite 6, Stellite 12, Stellite 706, and Zeron 100. Long-term immersion tests were conducted in 3.5 wt. % NaCl solution at 18 °C for 150 days. Ecorr was measured every day during the immersion period for half a year.

The collected dataset are transformed into sequences with appropriate lookback to maintain the information of former moment. Then LSTM neural network is trained to capture the dependences, and it is finally used to conduct future prediction for the following days’ pitting.
Figure 2 shows the Ecorr values of the samples versus the immersion time for 150 days. During immersion, visible pitting was first observed around 30 days for all alloy samples. Thus, we manually removed the first 30-day data, because pitting was in the initiation stage during this time, and Ecorr fluctuated greatly. Therefore, the dataset consisted of 480 entries in total, including the composition of each alloy, Vickers hardness (HV), and standard deviation of HV, as well as the immersion time of 120 days (days from 30 to 150), along with the target property of Ecorr. We shared the dataset to the Materials Genome Engineering Database to facilitate the data for further reuse, and the dataset can be found by this link (https://www.mgedata.cn/search/#/153870/1064).

The free corrosion potential (Ecorr) values measured during the immersion period of 150 days: a Cast Stellite 6, b Cast Stellite 12, c Cast Stellite 706, and d Zeron 100.
Traditional machine learning models
Firstly, traditional machine learning algorithms have been used, including support vector regression (SVR), k-nearest neighbor regression (KNR), gradient boosting regression (GBR), random forest regression (RFR), and AdaBoost regression (AdaBR)31. Machine learning algorithms regarded immersion time as one of the conditionally independent feature variables, capturing the relationship between the different chemical compositions, immersion times, and Ecorr. The chemical composition, HV, standard deviation of HV, and immersion time were utilized as the inputs, with the target property Ecorr as the outputs. Before model training, parameter tuning was performed to obtain the optimal model parameters. The whole dataset was randomly split with 80% as the training set (384 data entries) and 20% left as the testing set (96 data entries). Parameter tuning was employed on the training set using grid search by five-fold cross-validation with randomly selected hyperparameters for each machine learning algorithm.
We used mean squared error (MSE) as a metric for the error between the ground truth and predicted value under each hyperparameter. For five-fold cross-validation, the mean and variance of the five-fold MSEs were calculated to evaluate the comprehensive performance of all hyperparameters for each algorithm. Figure 3a shows the mean and variance values of the optimal hyperparameter for each algorithm. RFR performed the lowest mean MSE, while KNR and GBR also had a relatively low MSE; however, GBR exhibited a smaller variance, indicating that the GBR model would be more stable. Moreover, to evaluate the generalization capability intuitively, the models were also tested on the hold-out testing set with the optimal hyperparameter for each algorithm by the mean relative error (MRE) on both the training and testing sets (Fig. 3b).

Parameter tuning and model selection of the traditional machine learning models: a The mean squared errors with variances (error bars) of the parameter tuning process for RFR, SVR, KNR, GBR, and AdaBR; b The mean relative errors of machine learning models on the training set and testing set separately; c Diagonal scatter plot of the ground truth versus the predicted Ecorr by GBR during training and testing, respectively. Ecorr free corrosion potential, SVR support vector regression, KNR k-nearest neighbor regression, GBR gradient boosting regression, RFR random forest regression, AdaBR AdaBoost regression.
Although RFR exhibited better MRE on the training set than the other models, the difference in MRE between the training and unseen testing set was larger than GBR. Thus, GBR with a test MRE of 3.3% proved to have a better generalization ability and could be used for constructing the Ecorr prediction model of pitting propagation. Figure 3c gives the diagonal scatter plot of the ground truth versus the predicted Ecorr by GBR during training and testing respectively, illustrating good fitting.
LSTM neural network
To maintain the information of former moment, LSTM neural network was further trained to capture the time dependences. The LSTM neural network consists of a gated recurrent neural network (RNN) that can account for long-time dependencies, can perform dependency mining on sequence data, and learn a function that maps the sequence of past observations as an input to output observation30. LSTM can use memory cell ct to remove or add information. ct is composed of the input gate it, forget gate ft, and output gate ot (Fig. 4).

The pink circle represents the input of different moment, the blur circle represents the hidden state of different moment.
The LSTM model was implemented by TensorFlow and Keras after transforming the original dataset to a set of training sequences with a sliding window, namely the lookback window32,33. For Ecorr prediction of long-time immersion, lookback determined how many days of immersion data would be used to predict the Ecorr of the next day. As shown in Fig. 5a, lookback = 5 meant using the previous 5 days’ Ecorr to predict the Ecorr on day 6, and the window kept moving to the right. The larger the lookback window, the longer the model would capture the sequence dependencies; however, the fewer training sequences that would be generated based on 120 days (days 30–150) of data, and the model would be prone to overfitting. Thus, the smaller the window, the more training sequences that could be constructed; however, long-term sequence dependencies could not be captured, which required a tradeoff. We carried out parameter tuning of the lookback window for the LSTM neural network, as shown in Fig. 5b. For each lookback length, the LSTM neural network was trained on the first 80% sequences as the training set and tested on the remaining 20% sequences as the testing set to evaluate the generalization ability. Figure 5b shows the MSEs of the different lookbacks for cast Stellite 6 on the training and testing set. We concluded that lookback = 5 was optimal, as the others resulted in overfitting.

The schematic workflow and parameter tuning for the LSTM neural network: a Schematic workflow used by the LSTM model with the time-series immersion dataset; b Taking Cast Stellite 6 as an example, the mean squared errors of the different lookbacks for the LSTM model on the training and testing set are shown. LSTM long short-term memory.
Feature importance
To explore the contribution and importance of the alloy elements and immersion time in predicting Ecorr, feature importance analysis was carried out by two different methods, namely the permutation feature importance and Shapley Additive exPlanations (SHAP) values34,35. The permutation feature importance was used to reveal the effect of the feature to the target by shuffling a single feature. Therefore, a decrease in the model score indicates that the model is highly dependent on the feature, especially for nonlinear estimators. Figure 6a shows the box plot of the permutation importance distribution based on the GBR Ecorr model by repeating 50 times, where the features are shown in descending order according to their contribution to decreasing the accuracy score (MSE). The components of C, Fe, Si, and the immersion time acted as more important when they were shuffled, and they showed a great drop in the MSE of the Ecorr model. Furthermore, as a game theoretic approach, SHAP can interpret the output of machine learning models by the classic Shapley value. A feature’s positive SHAP value enhanced the properties, while conversely, a negative SHAP value for a feature weakened the properties.

Feature importance as given by the permutation importance and SHAP value based on the GBR Ecorr model: a Box plot of the feature contributions by permutation importance with the minimum and maximum score, lower and upper quartile, and mean value of various features versus its decrease in accuracy score of models; b Distribution plot of the feature contributions by the SHAP value. High feature value is colored with red and low feature value is colored with blue. GBR gradient boosting regression, SHAP Shapley Additive exPlanations.
Figure 6b shows how each feature affected the GBR model output of Ecorr, where the features are shown in descending order according to their importance by the average absolute value of all features’ SHAP values. The components of Si, Fe, C, and immersion time also acted as the most important factors for Ecorr prediction. For element Fe in Fig. 6b, the SHAP value was positive when increasing the component of Fe, which indicated that the addition of Fe would enhance Ecorr (the output of the model was kept stable). For the immersion time, it was obvious that a longer immersion time would weaken Ecorr (the output of the model tended to descend).
Overall, the two feature importance analysis methods based on different mechanisms both considered Fe, C, Si, and the immersion time to be most important for Ecorr, although they differed slightly in the importance order of Si. For the duplex stainless steel Zeron 100, Fe was the main element and C was 0.03%, while for the three cobalt-based alloys, Co was the main element, the content of Fe element accounted for 2–3%, while the content of C was greater than 1%. The pitting corrosion resistance of Zeron 100 was significantly better than the cobalt-based alloys. Therefore, the composition of the alloys was significantly different, resulting in the higher importance of these three elements. It is worth noting that the immersion time had an obvious influence on the Ecorr prediction by GBR (from Fig. 6b), indicating that the local corrosion states of the previous sequence were inherited into the prediction of the subsequent sequence and the cumulative effect over time dimension needs to be utilized.
The prediction following 70 days of immersion
To validate the analysis results and estimate the Ecorr of unseen immersion, additional 70-day immersion tests were carried out based on the previous experiment and the Ecorr was measured each day. We utilized the pre-built Ecorr models of GBR and LSTM to predict the following 70 days of pitting evolution. Figure 7 describes the training (120 days) and testing (70 days) stages by the GBR model for cast Stellite 6, cast Stellite 12, cast Stellite 706, and Zeron 100. Although the predicted values and the ground truths fit well in the training stage, in the subsequent 70-day testing stage, the GBR model gave fixed predicted values of the four alloys, which did not match the evolution trend of Ecorr. This indicated that traditional statistical analysis methods such as GBR defaulted to the assumption of independent and identical distribution among the data samples. For dynamic pitting evolution, it could not make use of the inherent time-series relationship between the data samples.

Prediction of the following 70 days of immersion by the GBR model: a Cast Stellite 6, b Cast Stellite 12, c Cast Stellite 706, and d Zeron 100. GBR gradient boosting regression, Ecorr free corrosion potential.
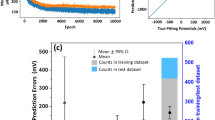
Figure 8 shows the prediction of the following 70 days of immersion by the LSTM model. Compared to the GBR model, the time-series model fit the trend of Ecorr well, especially in the testing stage (green plot in Fig. 8). The absolute deviation between the predicted value and the ground truth was somewhat large for cast Stellite 6, which was mainly due to the significant increase in Ecorr around day 150 (the dividing line between the training and testing stages). For the cast Stellite 12, 706, and Zeron 100 alloys, the absolute deviations between the predicted and ground truths at the testing stage were smaller. This indicated that the LSTM model could capture the inherent time-series relationship between the data samples and could be utilized in long-term pitting evolution prediction.

Prediction of the following 70 days of immersion by the LSTM model: a Cast Stellite 6, b Cast Stellite 12, c Cast Stellite 706, and d Zeron 100. LSTM long short-term memory, Ecorr free corrosion potential.
In summary, by taking cobalt-based alloys and duplex stainless steel as the case scenario, we explored a time-series-based machine learning method for predicting the pitting evolution behavior by LSTM. We constructed a pitting evolution model to predict Ecorr under immersion testing in saline during 150 days in the propagation stage. The traditional machine learning model GBR was compared with LSTM, which did not fit well in the evolution trend of Ecorr during the subsequent 70-day unseen testing stage. The LSTM model was more consistent with the evolution trend of the ground truth from experimentation, which illustrated that this method could capture the inherent time-series relationship between the data samples and could be utilized in long-term pitting evolution prediction. This work may provide a promising avenue for time-series sequence prediction, which could be further generalized for other material service and lifetime behavior predictions.
Methods
Data collection
All of the data used in this work were obtained by experiments in laboratory, including four different alloys: Stellite 6, Stellite 12, Stellite 706, and Zeron 100. The nominal chemical compositions of each material are shown in Table 1.
The samples were prepared by casting and were embedded in epoxy resin with a wire soldered to the rear. The surfaces were polished using 80, 240, 600, and 1200 grit SiC paper and then polished using 6-micron diamond paste. The hardness of these materials was also measured up to 50 times for each sample. Long-term immersion tests were conducted in 3.5 wt.% NaCl solution at 18 °C for 150 days. The images of the samples under different immersion stages were given in Supplementary Fig. 1.
Machine learning metrics
Mean squared error (MSE) was used as a metric for the error between the ground truth and predicted value under each hyperparameter, and MSE could be calculated by
where N is the total number of the dataset, and yi and \(\widehat {y_i}\) represent the ground truth and predicted value of the ith data entry, respectively.
Moreover, to evaluate the generalization capability intuitively, mean relative error (MRE) was also calculated on both the training and testing sets. MRE is defined by Eq. (2):
where N is the total number of the dataset, and yi and \(\widehat {y_i}\) represent the ground truth and predicted value of the ith data entry, respectively.
Traditional machine learning models
Support vector regression (SVR), k-nearest neighbor regression (KNR), gradient boosting regression (GBR), random forest regression (RFR), and AdaBoost regression (AdaBR) were used based on the Scikit-learn machine learning library. Parameter tuning was performed to obtain the optimal model parameters. The whole dataset from all types of concerned alloys was randomly split with 80% as the training set (384 data entries) and 20% left as the testing set (96 data entries). Parameter tuning was employed on the training set using grid search by five-fold cross-validation with randomly selected hyperparameters for each machine learning algorithm. The mean and variance of the five-fold MSEs were calculated to evaluate the comprehensive performance of all hyperparameters for each algorithm.
LSTM neural network
The internal structure of LSTM comprises the forget gate, input gate, and output gate. LSTM can use memory cell ct to remove or add information. ct is composed of the input gate it, forget gate ft, and output gate ot. First, LSTM decided what information would be discarded from the cell state by the forget gate. The previous sequence’s hidden state ht–1 and current data Xt are simultaneously input into the forget gate ft. The forget gate’s output represented the probability of forgetting the information provided by ht–1, as given in Eq. (3):
where Wf, bf and σ are the linear correlation coefficient, bias, and sigmoid activation function respectively. The value of ft is between 0 and 1, where 0 indicates that no information can pass, and 1 indicates that any information can pass.
The input gate determines how much new information is stored in the cell state, which consists of two parts, namely, it and \(\hat c_t\), where it utilizes the sigmoid activation function (Eq. (4)) and \(\hat c_t\) utilizes the tanh activation function (Eq. (5)):
where Wi and Wc represent linear correlation coefficients, and bi, and bc represent biases.
The results of it and \(\hat c_t\) had to be multiplied to update the old cell state ct–1 to new ct. The old state ct–1 was multiplied by ft to discard the information that would certainly be discarded, and then added by the product of the input gate it and \(\hat c_t\), as Eq. (6). For the output gate ot (Eq. (7)), the sigmoid activation function was used and Wo and bo indicated the correlation coefficient and bias. The hidden state ht was finally updated by the product of ot and ct after the activation function tanh (Eq. (8)), according to:
The LSTM neural network was implemented by TensorFlow and Keras after transforming the original dataset to a set of training sequences with a sliding window, namely the lookback window. We carried out parameter tuning of the lookback window for the LSTM neural network, where we transformed the 120 days of data entries of the 4 alloys into time-series sequences with lookbacks of 3, 5, 8, and 15. For each lookback length, the LSTM neural network was trained on the first 80% sequences as the training set and tested on the remaining 20% sequences as the testing set to evaluate the generalization ability for individual dataset related to each type of alloy. Taking Cast Stellite 6 alloy as an example, the architecture of the LSTM neural network for the cast Stellite 6 alloy consisted of an input layer with 5 units (e.g., lookback = 5), 3 hidden layers with 128 units, and a fully connected layer with 1 unit and a ‘relu’ activation function as the output layer. Except for the output layer, dropout was used to prevent the neural networks from overfitting. The MSE metric was applied as a loss function and the network was optimized by the ‘Adam’ stochastic optimization algorithm. The hyperparameters were also tuned, including the number of hidden layers and units, batch size, and dropout.
Data availability
We shared the dataset to the Materials Genome Engineering Database to facilitate the data for further reuse, and the dataset can be found by this link (https://www.mgedata.cn/search/#/153870/1064).
Code availability
The relevant code is available from the corresponding author upon reasonable request.
References
Li, T., Wu, J. & Frankel, G. Localized corrosion: Passive film breakdown vs. Pit growth stability, Part VI: Pit dissolution kinetics of different alloys and a model for pitting and repassivation potentials. Corros. Sci. 182, 109277 (2021).
Williams, D., Westcott, C. & Fleischmann, M. Stochastic models of pitting corrosion of stainless steels: I. Modeling of the initiation and growth of pits at constant potential. J. Electrochem. Soc. 132, 1796 (1985).
Williams, D. E., Stewart, J. & Balkwill, P. H. The nucleation, growth and stability of micropits in stainless steel. Corros. Sci. 36, 1213–1235 (1994).
Frankel, G., Stockert, L., Hunkeler, F. & Boehni, H. Metastable pitting of stainless steel. Corrosion 43, 429–436 (1987).
Li, T. et al. Cryo-based structural characterization and growth model of salt film on metal. Corros. Sci. 174, 108812 (2020).
Li, T., Scully, J. & Frankel, G. Localized corrosion: passive film breakdown vs pit growth stability: part v. validation of a new framework for pit growth stability using one-dimensional artificial pit electrodes. J. Electrochem. Soc. 166, C3341 (2019).
Li, T., Scully, J. & Frankel, G. Localized corrosion: passive film breakdown vs. pit growth stability: part IV. The role of salt film in pit growth: a mathematical framework. J. Electrochem. Soc. 166, C115 (2019).
Newman, R. C. A comprehensive modelling and experimental approach to study the diffusion-controlled dissolution in pitting corrosion. Corros. Sci. 186, 109461 (2021).
Frankel, G. S., Li, T. & Scully, J. R. Perspective—localized corrosion: passive film breakdown vs pit growth stability. J. Electrochem. Soc. 164, C180 (2017).
Zhu, L., Zhou, J. & Sun, Z. Materials data toward machine learning: advances and challenges. J. Phys. Chem. Lett. 13, 3965–3977 (2022).
Hart, G. L. W., Mueller, T., Toher, C. & Curtarolo, S. Machine learning for alloys. Nat. Rev. Mater. 6, 730–755 (2021).
Lookman, T., Balachandran, P. V., Xue, D. & Yuan, R. Active learning in materials science with emphasis on adaptive sampling using uncertainties for targeted design. npj Comput. Mater. 5, 1–17 (2019).
Wang, W. et al. Automated pipeline for superalloy data by text mining. npj Comput. Mater. 8, 1–12 (2022).
Liu, P. et al. Evolution analysis of γ‘precipitate coarsening in Co-based superalloys using kinetic theory and machine learning. Acta Mater. 235, 118101 (2022).
Jiang, X. et al. A strategy combining machine learning and multiscale calculation to predict tensile strength for pearlitic steel wires with industrial data. Scr. Mater. 186, 272–277 (2020).
Cai, J., Cottis, R. & Lyon, S. Phenomenological modelling of atmospheric corrosion using an artificial neural network. Corros. Sci. 41, 2001–2030 (1999).
Parthiban, T. et al. Neural network analysis for corrosion of steel in concrete. Corros. Sci. 47, 1625–1642 (2005).
Shen, C. et al. Physical metallurgy-guided machine learning and artificial intelligent design of ultrahigh-strength stainless steel. Acta Mater. 179, 201–214 (2019).
Nyby, C. et al. Electrochemical metrics for corrosion resistant alloys. Sci. Data 8, 1–11 (2021).
Taylor, C. D. & Tossey, B. M. High temperature oxidation of corrosion resistant alloys from machine learning. npj Mater. Degrad. 5, 1–10 (2021).
Roy, A. et al. Machine-learning-guided descriptor selection for predicting corrosion resistance in multi-principal element alloys. npj Mater. Degrad. 6, 1–10 (2022).
Yan, L., Diao, Y., Lang, Z. & Gao, K. Corrosion rate prediction and influencing factors evaluation of low-alloy steels in marine atmosphere using machine learning approach. Sci. Technol. Adv. Mat. 21, 359–370 (2020).
Diao, Y., Yan, L. & Gao, K. Improvement of the machine learning-based corrosion rate prediction model through the optimization of input features. Mater. Des. 198, 109326 (2021).
Zhi, Y. et al. Improving atmospheric corrosion prediction through key environmental factor identification by random forest-based model. Corros. Sci. 178, 109084 (2021).
Pei, Z. et al. Towards understanding and prediction of atmospheric corrosion of an Fe/Cu corrosion sensor via machine learning. Corros. Sci. 170, 108697 (2020).
Jiang, X., Yan, Y. & Su, Y. Predicting the corrosion properties of cast and hot isostatic pressed CoCrMo/W alloys in seawater by machine learning. Anti Corros. Method. M. 69, 288–294 (2022).
Coelho, L. B. et al. Reviewing machine learning of corrosion prediction in a data-oriented perspective. npj Mater. Degrad. 6, 1–16 (2022).
Aghaaminiha, M. et al. Machine learning modeling of time-dependent corrosion rates of carbon steel in presence of corrosion inhibitors. Corros. Sci. 193, 109904 (2021).
Shewalkar, A. Performance evaluation of deep neural networks applied to speech recognition: RNN, LSTM and GRU. J. Artif. Intell. Soft 9, 235–245 (2019).
Yu, Y., Si, X., Hu, C. & Zhang, J. A review of recurrent neural networks: LSTM cells and network architectures. Neural Comput 31, 1235–1270 (2019).
Pedregosa, F. et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 12, 2825–2830 (2011).
Abadi, M. et al. Tensorflow: Large-scale machine learning on heterogeneous distributed systems. Preprint at https://arxiv.org/pdf/1603.04467.pdf (2016).
Gulli, A. & Pal, S. Deep learning with Keras, Vol. 2. (Packt Publishing Ltd, 2017).
Breiman, L. Random forests. Mach. Learn 45, 5–32 (2001).
Lundberg, S. M. & Lee, S.-I. A unified approach to interpreting model predictions. in Advances in Neural Information Processing Systems, vol. 30 (NeurIPS Proceedings, 2017).
Acknowledgements
This work is financially supported by the National Key Research and Development Program of China (2021YFB3802101, 2021YFB3702403, 2020YFB0704503, and 2016YFB0700500), National Natural Science Foundation of China (52201061, U22A20106), USTB MatCom of Beijing Advanced Innovation Center for Materials Genome Engineering. Y.Y. is grateful to the late Prof. Anne Neville for taking him into the world of corrosion and tribology.
Author information
Authors and Affiliations
Contributions
X.J. performed the dataset transformation, data analysis, and drafted the manuscript. Y.Y. performed the experiment and oversaw results, discussion, interpretation, and edited the manuscript. Y.S. provided technical expertise on machine learning, interpreted the results, and reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jiang, X., Yan, Y. & Su, Y. Data-driven pitting evolution prediction for corrosion-resistant alloys by time-series analysis. npj Mater Degrad 6, 92 (2022). https://doi.org/10.1038/s41529-022-00307-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41529-022-00307-4
