
Abstract
Laser-based ranging (LiDAR) - already ubiquitously used in industrial monitoring, atmospheric dynamics, or geodesy - is a key sensor technology. Coherent laser ranging, in contrast to time-of-flight approaches, is immune to ambient light, operates continuous-wave allowing higher average powers, and yields simultaneous velocity and distance information. State-of-the-art coherent single laser-detector architectures reach hundreds of kilopixel per second sampling rates, while emerging applications - autonomous driving, robotics, and augmented reality - mandate megapixel per second point sampling to support real-time video-rate imaging. Yet, such rates of coherent LiDAR have not been demonstrated. Recent advances in photonic chip-based microcombs provide a route to higher acquisition speeds via parallelization but require separation of individual channels at the detector side, increasing photonic integration complexity. Here we overcome the challenge and report a hardware-efficient swept dual-soliton microcomb technique that achieves coherent ranging and velocimetry at megapixel per second line scan measurement rates with up to 64 optical channels. Multiheterodyning two synchronously frequency-modulated microcombs yields distance and velocity information of all individual ranging channels on a single receiver alleviating the need for individual separation, detection, and digitization. The reported LiDAR implementation is compatible with photonic integration and demonstrates the significant advantages of acquisition speed afforded by the convergence of optical telecommunication and metrology technologies.
Similar content being viewed by others

Introduction
Three-dimensional (3D) imaging based on lasers is ubiquitously used in numerous applications, ranging from airborne imaging for the cartography of geological sites1 and urban planning to satellite-based applications in space. A recent surge in autonomous driving2 and drone technology3 drives the development of even more sophisticated laser ranging systems. LiDAR maintains excellent angular resolution at long range and works reliably in a variety of weather, illumination and target conditions that impede direct camera imaging. While most commercial implementations of LiDAR employ incoherent detection of the intensity of reflected light, coherent detection of the back-reflected signal using a copy of the transmitted optical waveform4,5,6 is intrinsically resilient to crosstalk and interference from ambient sunlight detection7. Furthermore, it achieves high depth resolution dependent on chirp excursion without the need for high-bandwidth electronics8,9 and gives both distance and velocity (via the Doppler effect) for each pixel10 facilitating object classification.
One challenge to harvesting the inherent advantages of coherent or frequency-modulated continuous-wave (FMCW) LiDAR for 3D imaging is to overcome the frame-rate acquisition bottleneck that is imposed by tunable diode laser sources that trade-off tunability versus linewidth11 and artificial Doppler broadening due to the mechanical tilt motion of the mirrors, which necessitates inertia-free scanning solutions. A video frame rate (30 Hz) with 600 × 300 pixel images requires more than 5 megapixel/second measurement rates. Such large frame rates cannot be attained by increasing measurement speed due to limitations imposed by mechanical scanning, and pixel dwell time, i.e., signal-to-noise ratio. A manifold of solutions for inertia-free scanning based on photonic switching networks12, focal plane arrays9, spectrally encoded spatial scanning with broadband13,14,15 or frequency swept light sources16,17, or optical phased arrays18 have been implemented. Yet to date, megapixel rate coherent LiDAR has not been demonstrated.
Parallel detection architectures can further increase the acquisition rates. In time-of-flight LiDAR, it supports the operation of up to 128 channels. Recently, dissipative Kerr solitons (DKS)19—coherent frequency combs generated in a continuous wave-driven Kerr nonlinear microresonator—showed the parallelization of FMCW laser into multiple optical channels (although electro-optical combs are equally suitable20,21). DKS can faithfully transfer the time-frequency characteristics of an FMCW pump laser to all comb teeth22 at modulation speeds up to 10 MHz with a mode spacing of 100 GHz (supported by commercial multiplexers). The large comb spacing facilitates the spatial separation of the comb teeth with diffractive optics. Each tooth can independently and simultaneously measure the distance and velocity in a parallel fashion. However, the number of optical channels employed determines the number of balanced photo-receivers, electrical amplifiers and analog-to-digital converters. Custom, large-area silicon photonic solutions9,12 and dense wavelength-division multiplexers would be required to unlock the potential of massively parallel FMCW ranging.
Here, we demonstrate a hardware-efficient massively parallel coherent FMCW LiDAR based on multiheterodyne mixing of two photonic chip-based soliton microcombs on a single coherent photoreceiver, enabling bona fide 5.6 megapixels per second measurement rates, with more than 64 simultaneous channels.
Results
Concept of hardware-efficient megapixel coherent ranging
Our approach is a swept frequency version of multiheterodyne detection23 of optical frequency combs, commonly referred to as dual-comb spectroscopy. This technique has attained widespread attention and application in (nonlinear) optical and THz spectroscopy24,25,26, optical microscopy27,28, distance measurement29,30,31, two-way time-frequency transfer32, microwave photonics33, multi-dimensional spectroscopy34, coherent anti-Stokes Raman imaging35, and recently demonstrated spectrally interleaved broadband spectroscopy with frequency swept electro-optical dual-comb36,37. This method decodes all individual low frequency (MHz bandwidth) channels using a single high speed (GHz) coherent ‘intradyne’ detector by radio-frequency multiplexing. These detectors are nowadays widespread in data centers38; for example, a recently introduced silicon photonics-based coherent optical pluggable transceiver 400ZR supports 64 GBaud modulation speeds39, which would constitute an off-the-shelf component solution for a chip-scale FMCW LiDAR.
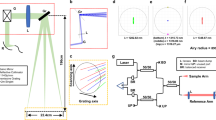
In our experiments (cf. Fig. 1a), we utilized a single highly coherent FMCW laser that was amplified, split and coupled into two size-mismatched photonic chip-based integrated Si3N440 microring resonators (cf. Fig. 1b) driving two dissipative Kerr solitons41. Fast frequency tuning of the pump laser within the soliton existence range retains the DKS state in both resonators22. The rapid frequency modulation is encoded onto the carrier-envelope frequency fceo of the pulse while the pulse repetition rate frep remains almost constant. In the frequency domain (cf. Fig. 1d), we obtain two soliton microcombs with slightly different comb line spacing Δfrep where each comb line inherits the pump laser frequency modulation. Multiheterodyne mixing of the reflected signal comb with the local oscillator (LO) comb on a single coherent photoreceiver enables the reconstruction of the entire complex RF spectrum (cf. Fig. 1c, d), which contains the distance xμ and velocity υμ information for each comb line μ simultaneously (μ denotes the relative mode number with respect to the pump laser mode).

a Architecture of the multiheterodyne parallel FMCW LiDAR. A single pump laser with triangular frequency modulation drives two distinct optical microresonators with slightly different radii, which serve as signal and local oscillator (LO) in the experiment. The signal comb is spatially dispersed over the target area using diffractive optics. Each signal comb tooth μ (with an optical frequency νμ) represents an independent FMCW ranging channel measuring distance xμ and velocity υμ. All channels are simultaneously superimposed with the LO comb on a coherent receiver. The interferogram is processed via short-time Fourier transform analysis to retrieve distances xμ and velocities υμ. b Electron microscope picture of 228.43 μm Si3N4 microring resonator. c The complex RF spectrum is retrieved by phase diversity detection and Fourier transform. d Principle of multiheterodyne ranging and velocimetry. The Signal and LO combs have repetition rates frep of 98.90 GHz and 99.39 GHz, respectively. The reflected signal comb light is time delayed and frequency shifted due to the Doppler effect. Beat notes of consecutive comb tooth pairs are spaced 490 MHz in the RF spectrum. Triangular frequency modulation maps the distance of target objects to two RF beat notes, \({f}_{\mu }^{{{{{{{{\rm{d}}}}}}}}}\) and \({f}_{\mu }^{{{{{{{{\rm{u}}}}}}}}}\), spaced around the center frequency of the multiheterodyne channel μ ⋅ frep offset by the Doppler shift caused by the relative velocity of LiDAR transmitter and target.
In comparison to conventional FMCW LiDAR10, multiheterodyne detection modifies the formulas to calculate (xμ, υμ) from the beat notes \({f}_{\mu }^{{{{{{{{\rm{u}}}}}}}}},{f}_{\mu }^{{{{{{{{\rm{d}}}}}}}}}\) measured during the up- and down-chirping of the FMCW laser because the intermediate frequency is no longer at the baseband. Instead, consecutive channels in the radio-frequency (RF) domain are separated by the difference in comb line spacing Δfrep. To mitigate the degeneracy in optical detection between +μ and −μ comb lines located symmetric about the pump (μ = 0), we employ a phase diversity receiver architecture42,43 and measure both the in-phase (I) and quadrature (Q) components of the multiheterodyne beat note (cf. Fig. 1c). The Fourier transform of the complex field amplitude I + iQ distinguishes positive and negative frequencies in the multiheterodyne beat spectrum44. The deviation of the beat note pattern from μ ⋅ Δfrep determines the Doppler shift and non-zero detection distance translates into a splitting of the RF beat note
where υμcosθμ is a projection of the target velocity along the optical path and νμ is the optical frequency of the μ-th comb line.
In the experiments, we used frequency combs with 99.39 GHz and 98.9 GHz repetition rates, i.e. a 490 MHz difference (cf. Fig. 2c). We simultaneously generated two DKS from a single triangularly chirped laser with an amplitude B = 1.5 GHz and a period T = 10 μs and thermally tuned the two pump resonances into degeneracy to match their trajectories in the soliton existence range (cf. Fig. 2b). The pump laser frequency was modulated by dual Mach-Zehnder biased to single-sideband modulation. The voltage-controlled oscillator drove the modulator with a triangular waveform that we digitally predistorted and linearized (cf. Supplementary Information).

a Optical setup for heterodyne and delayed homodyne beat note measurement. The signal microcomb is delayed and mixed in a 90∘ optical hybrid and superimposed with the local oscillator (LO) microcomb on a pair of balanced photoreceivers for delayed homodyne beat frequency generation. Alternatively, the tuning of individual comb line pairs is characterized by heterodyne mixing with an external cavity diode laser (ECDL). b Soliton microcomb stability chart. Optical resonances are thermally tuned to superimpose the laser-cavity detuning regions of stable soliton generation (green shaded). MI modulation instability, CW continuous-wave. c Optical spectra of signal and LO combs featuring a slight offset in repetition rate. The blue(red) shading highlights positive(negative) channels (μ = 0 denotes the pump laser) used in LiDAR experiments limited by the available amplifier bandwidth and amplified spontaneous emission noise. d Time-frequency map of heterodyne beat spectroscopy at the ±3 and ±11 channels. ENBW 2.45 MHz. e Time-frequency map of delayed homodyne beat spectroscopy. ENBW 2.45 MHz. Image peaks are related to imperfect phase compensation in IQ detection (cf. Supp. inf). f Channel-dependent frequency excursion bandwidth at the 100-kHz modulation frequency. g Channel-dependent absolute excursion difference of signal and LO combs. h, i Channel-dependent RMS deviation from a perfect triangular frequency chirp for LO and signal.
First, we obtained a heterodyne beatnote by superimposing the frequency combs individually with an external-cavity diode laser onto two balanced photoreceivers (BPD). The resulting signals were analyzed by short-time Fourier transform. Figure 2d shows the laser frequency of the two simultaneously chirped local oscillator and signal microcomb for channels μ = ±3, ±11, highlighting the similarity and relative spacing of the frequency modulation pattern. The delayed homodyne beat note spectrum for the same channels is depicted in Fig. 2e where the delay line distance corresponds to the frequency splitting.
The maximum number of LiDAR channels is limited by the optical amplification and coherent receiver bandwidths Bpd. The latter limitation reads as μΔfrep < Bpd and can be overcome by reducing the repetition rate difference Δfrep with the trade-off of a reduced distance ambiguity range. The channel-dependent frequency excursion Bμ (cf. Fig. 2f) is related to the soliton self-frequency shift induced by intrapulse Raman scattering45,46 and dispersive wave recoil47,48 and ranges from 1.3 GHz to 1.8 GHz, which corresponds to a native axial distance resolution Δxμ = c/2Bμ of 12 cm to 8 cm. The performance of dual-comb FMCW heterodyne detection relies not only on the mutual coherence of the Signal and LO combs (ensured by degenerate pumping scheme), but also on the equality (cf. Fig. 2g) and low nonlinearity (cf. Fig. 2h, i) of the chirp transduction from the pump laser in both nonlinear microresonators. The relative phase deviation between the corresponding Signal and LO comb lines (cf. Supplementary Figs. 4, 5) affects the resulting signal RF beatnote linewidth broadening and thus the LiDAR performance (outlined in the Supplementary Information).
Massively parallel coherent ranging
To demonstrate the capabilities of dual-comb massively parallel coherent imaging, we perform proof-of-principle parallel ranging experiments. The setup is depicted in Fig. 3a. The soliton microcombs are amplified in erbium-doped fiber amplifiers (EDFA). The target comprises three chess figures (queen, king and pawn—cf. Supplementary Fig. 9) placed approximately ~1 m in front of the beam-splitter and optical transmission grating. A single-axis galvanometric mirror is used for beam scanning in the vertical direction. Figure 3c depicts the optical spectrum of the signal comb interrogating the target. The Fourier transform of the complex signal I + iQ, photodetected on the coherent receiver during 10 μs, represents a two-sided spectrum containing information about all 28 channels (cf. Fig. 3b). Blue and red shadings highlight positive μ > 0 and negative μ < 0 frequency comb teeth with respect to the pump laser frequency. Two different projections of the 3D-imaging results for a scan of 136 vertical angles across the set of chess figures are depicted in Fig. 3d,e. A line of 28 pixels is recorded during a single 10 μs triangular laser chirp, which equates to a true, i.e., bona fide 2.8 MPix/s coherent distance sampling rate at the sampling oscilloscope. We emphasize that this operation differs from experiments, which detect, digitize, and process each de-multiplexed channel successively and thus report aggregated data or sampling rates22. The details of the multichannel data segmentation filtering, IQ phase and amplitude imbalance compensation, computational complexity of the required signal processing, precision, accuracy and repeatability of distance measurements are outlined in the Supplementary Information.

a Experimental setup. The amplified signal comb is dispersed in free space by a 966 lines/mm transmission grating, and a mirror galvanometer provides vertical scanning. EDFA Erbium-doped fiber amplifier, FPC Fiber polarization controller, COL collimator, PBS Polarizing beamsplitter. b Power spectral density of the electrical signal obtained at the coherent receiver highlighting 28 FMCW channels. The red and blue shading highlights signals obtained from negative and positive channel numbers. The resolution bandwidth equals to 100 kHz. Signal-to-Noise ratio ranges in between 5–20 dB with polarization-dependent variations. c Optical spectrum used for 3D imaging. The red and blue shaded regions correspond to the signal plotted in b. d, e Point clouds of the three chess figures obtained during a scan (28 × 136 points) of the mirror galvanometer.
Dense megapixel per second coherent ranging
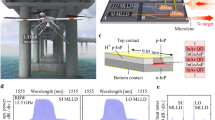
In a second proof-of-principle experiment, we demonstrate dense coherent hardware-efficient parallel velocimetry with our dual frequency-modulated soliton microcomb platform at even higher rates of 6.4 megapixel per second. Lowering the repetition rate to 35 GHz illustrates the advantage of the dual-comb approach, which alleviates the need to operate at large line spacings compatible with wavelength division multiplexers and facilitates mode spacing related limitations of channel isolation. To this end, we employ two low repetition rate soliton microcombs operating at frep of 35 GHz allowing us to have more than 60 channels within the Erbium-doped fiber amplifier (EDFA) gain window.
While spectral compression of the microcomb from 99 GHz to 35 GHz does limit the triangular chirp frequency excursion to 700 MHz at the same pump power, this does not limit the accuracy of Doppler velocimetry and we can retain the 100 kHz modulation frequency. The optical spectra of the signal and LO solitons are shown in Fig. 4a. The inset highlights the repetition rate offset Δfrep of ~140 MHz. The signal comb is dispersed by the same transmission grating along the circumference of a 20 mm flywheel rotating at 162 Hz (cf. Fig. 4b, c). The pump channel is approximately aligned at the center of the flywheel such that negative channels (negative RF frequencies) record an approaching target and positive channels (positive RF frequencies) a receding target. The time-frequency maps of the complex spectrum for the μ = ±6, ±26 channels are plotted in Fig. 4d, and the dashed red lines highlight the baseband frequencies of multiheterodyne detection equal to μΔfrep. We calculate the velocities by computing the mean deviation of the beat notes from the equivalent baseband and depict the results in Fig. 4e. Open circles correspond to the results after analyzing a single scan period, while the filled circles correspond to the averaging over five chirp periods. We also demonstrate a velocity profile of the static wheel (gray circles) for comparison. On average, we attained 56 pixel detections over one period resulting in 5.6 MPix/s, i.e., actually detected, velocity and distance information acquisition speed. We attribute the velocity measurement uncertainty (Fig. 4e middle panel) to the mechanical vibrations of the flywheel. The distance measurement is depicted in Fig. 4e bottom panel and is less accurate compared with ranging utilizing 100 GHz combs due to the reduced frequency excursion and, consequently, resolution and accuracy.

a Optical spectra of the 35 GHz dual FMCW combs. b Schematic illustration of the flywheel section irradiated by the signal comb lines. (Left) COL Collimator, TG transmission grating. (Right) The projections of the velocity vμ of the wheel onto the comb lines. c Periodogram of the spinning flywheel sound recorded on a cellphone microphone depicting a peak corresponding to the rotation frequency. d Time-frequency map featuring an offset of the mean beat frequency from the μΔfrep due to the Doppler shift. ENBW 2.45 MHz. e (Top) Multichannel velocity measurement for the flywheel rotating at 162 Hz for a single 10 μs scan (open circles) and five frame stacking (filled circles). Grey data points show velocimetry results for the static wheel. The left inset shows the Fourier transform of the signal current in the RF band corresponding to μ = −6 channel recorded over one period. The right inset shows a static wheel velocity histogram. (Middle) Error of velocimetry for single scan and five frame stack. (Bottom) Ranging results for five frame stacking.
With recent demonstrations of DKS in low-repetition rate microresonators49,50 the approach could readily exceed 10 MPix/s.
Discussion
In summary, we have demonstrated a megapixel-rate parallel coherent laser ranging based on multiheterodyne detection of chirped carriers on a single coherent receiver. Two integrated soliton microcombs driven by the same chirped pump laser provide a minimalist implementation of the dual chirped-comb system. The approach is free of channel separation, photo-detection and processing of individual channels.
Utilization of arbitrary, particularly very dense, frequency comb channel spacing is possible since multiplexers are not required. When combined with phased arrays, or other compact non-inertial scanning solutions, our approach provides a route to field-deployable MPix/s LiDAR systems that enable sufficient frame rate for video rate 3D imaging. Moreover, high-bandwidth silicon photonics-based IQ detectors are already offered commercially—making our method fully compatible with photonic integration. A recently demonstrated full heterogeneous integration combining InP/Si semiconductor lasers and ultralow-loss silicon nitride microresonators for DKS generation51 is feasible as a path to chip-scale parallel FMCW LiDAR. Such photonic integration does not only bring another degree of miniaturization and possibility of wafer-scale production but also reduces optical loss, increases noise performance of the laser, and achievable scanning rates52. Erbium-doped fiber amplifiers could be replaced by broadband semiconductor optical amplifiers (SOA) co-integrated on the silicon substrate53,54. It should be noted that SOAs are subject to high nonlinearities and spectral distortion. However, it can be reduced by selecting gain media with low α-factor55,56. The broadband amplification would increase comb repetition rate while maintaining high channel count, which leads to improved soliton comb line power and relaxes the requirements on the grating line density.
While the approach comes at the expense of reduced Signal-to-Noise ratio due to the multiheterodyne detection penalty57 (outlined in the Supplementary Information), it benefits from the absence of multiplexers or photonic integrated solutions for detection of individual channels, which typically exhibit significant insertion loss.
Synchronous tuning of the pump laser and the microresonator, i.e., using monolithically integrated piezoelectrical frequency tuners58 or frequency comb generation in electro-optical materials20, serves to eliminate the residual nonlinearities of tuning that arise from the Raman self-frequency shift of the soliton and remove the requirement of high-power pumping while possibly extending the soliton existence range.
Finally, and equally important, we believe that our work will motivate further investigation of the frequency swept microresonator dual-comb approach in the neighboring fields of linear and nonlinear spectroscopy, optical coherence tomography.
Methods
Sample fabrication
Integrated Si3N4 microresonators are fabricated with the photonic damascene process. Features are defined using deep-ultraviolet (DUV) stepper lithography, reactive ion etching and silica preform reflow prior to deposition reduces scattering losses. The waveguide width is 1.5 μm, and its height is 0.82 μm, which leads to an anomalous second-order dispersion of D2/2π = 1.13 MHz and the third-order dispersion parameter is D3/2π = 576 Hz. The positions of the resonance frequencies close to the pumped resonance are expressed with the series ωμ = ω0 + ∑i≥1Diμi/i!. The ring radius of the signal comb is 228.43 μm and results in a resonator free-spectral range of D1/2π = 98.9 GHz. The LO comb has a similar cross-section, and its radius is 227.27 μm, which leads to a free-spectral range of 99.35 GHz. Both resonators are operated in the strongly overcoupled regime with intrinsic loss rate κ0/2π = 15 MHz and bus waveguide coupling rate κex/2π = 130 MHz in order to optimize comb output power and optical signal-to-noise-ratio after amplification. The radii of the 35 GHz samples are 645 μm and 648 μm resulting in Δfrep ≈ 140 MHz.
Data availability
The data used to produce the plots within this paper are available at https://doi.org/10.5281/zenodo.589852359.
Code availability
The code used to produce the plots within this paper is available at https://doi.org/10.5281/zenodo.589852359.
References
Canuto, M. A. et al. Ancient lowland maya complexity as revealed by airborne laser scanning of northern guatemala. Science 361, eaau0137 (2018).
Urmson, C. et al. Autonomous driving in urban environments: Boss and the urban challenge. J. Field Robot. 25, 425–466 (2008).
Almeida, D. R. A. et al. Monitoring the structure of forest restoration plantations with a drone-lidar system. Int. J. Appl. Earth Observation Geoinf. 79, 192–198 (2019).
Bostick, H. A carbon dioxide laser radar system. IEEE J. Quantum Electron. 3, 232–232 (1967).
Uttam, D. & Culshaw, B. Precision time domain reflectometry in optical fiber systems using a frequency modulated continuous wave ranging technique. J. Lightwave Technol. 3, 971–977 (1985).
Piggott, A. Y. Understanding the physics of coherent lidar. arXiv preprint arXiv:2011.05313 (2020).
Behroozpour, B., Sandborn, P. A. M., Wu, M. C. & Boser, B. E. Lidar system architectures and circuits. IEEE Commun. Mag. 55, 135–142 (2017).
Agishev, R., Gross, B., Moshary, F., Gilerson, A. & Ahmed, S. Range-resolved pulsed and cwfm lidars: potential capabilities comparison. Appl. Phys. B 85, 149–162 (2006).
Rogers, C. et al. A universal 3d imaging sensor on a silicon photonics platform. Nature 590, 256–261 (2021).
Pierrottet, D. et al. Linear fmcw laser radar for precision range and vector velocity measurements. MRS Online Proc. Library Arch. 1076, 10760406 (2008).
Amann, M.-C. Phase noise limited resolution of coherent lidar using widely tunable laser diodes. Electron. Lett. 28, 1694–1696 (1992).
Martin, A. et al. Photonic integrated circuit-based fmcw coherent lidar. J. Lightwave Technol. 36, 4640–4645 (2018).
Bao, C., Suh, M.-G. & Vahala, K. Microresonator soliton dual-comb imaging. Optica 6, 1110–1116 (2019).
Wang, C. et al. Line-scan spectrum-encoded imaging by dual-comb interferometry. Opt. Lett. 43, 1606–1609 (2018).
Jiang, Y., Karpf, S. & Jalali, B. Time-stretch lidar as a spectrally scanned time-of-flight ranging camera. Nat. Photonics 14, 14–18 (2020).
Qian, R. et al. Video-rate high-precision time-frequency multiplexed 3D coherent ranging. Nat. Commun. 13, 1–10 (2022).
Okano, M. & Chong, C. Swept source lidar: simultaneous fmcw ranging and nonmechanical beam steering with a wideband swept source. Opt. Express 28, 23898–23915 (2020).
Poulton, C. V. et al. Long-range lidar and free-space data communication with high-performance optical phased arrays. IEEE J. Sel. Top. Quantum Electron. 25, 1–8 (2019).
Kippenberg, T. J., Gaeta, A. L., Lipson, M. & Gorodetsky, M. L. Dissipative kerr solitons in optical microresonators. Science 361, eaan8083 (2018).
Zhang, M. et al. Broadband electro-optic frequency comb generation in a lithium niobate microring resonator. Nature 568, 373–377 (2019).
Kuse, N. & Fermann, M. E. Frequency-modulated comb lidar. APL Photonics 4, 106105 (2019).
Riemensberger, J. et al. Massively parallel coherent laser ranging using a soliton microcomb. Nature 581, 164–170 (2020).
Schiller, S. Spectrometry with frequency combs. Opt. Lett. 27, 766 (2002).
Keilmann, F., Gohle, C. & Holzwarth, R. Time-domain mid-infrared frequency-comb spectrometer. Opt. Lett. 29, 1542–1544 (2004).
Coddington, I., Newbury, N. & Swann, W. Dual-comb spectroscopy. Optica 3, 414–426 (2016).
Hsieh, Y.-D. et al. Spectrally interleaved, comb-mode-resolved spectroscopy using swept dual terahertz combs. Sci. Rep. 4, 3816 (2014).
Mizuno, T. et al. Full-field fluorescence lifetime dual-comb microscopy using spectral mapping and frequency multiplexing of dual-comb optical beats. Sci. Adv. 7, eabd2102 (2021).
Hase, E. et al. Scan-less confocal phase imaging based on dual-comb microscopy. Optica 5, 634–643 (2018).
Coddington, I., Swann, W. C., Nenadovic, L. & Newbury, N. R. Rapid and precise absolute distance measurements at long range. Nat. Photonics 3, 351–356 (2009).
Trocha, P. et al. Ultrafast optical ranging using microresonator soliton frequency combs. Science 359, 887–891 (2018).
Suh, M. G. & Vahala, K. J. Soliton microcomb range measurement. Science 359, 884–887 (2018).
Giorgetta, F. R. et al. Optical two-way time and frequency transfer over free space. Nat. Photonics 7, 434–438 (2013).
Kim, H. J., Leaird, D. E. & Weiner, A. M. Rapidly tunable dual-comb rf photonic filter for ultrabroadband rf spread spectrum applications. IEEE Trans. Microw. Theory Tech. 64, 3351–3362 (2016).
Lomsadze, B., Smith, B. C. & Cundiff, S. T. Tri-comb spectroscopy. Nat. Photonics 12, 676–680 (2018).
Ideguchi, T. et al. Coherent raman spectro-imaging with laser frequency combs. Nature 502, 355–358 (2013).
Nishikawa, T. et al. Automatic Interpolation of 25 GHz Mode Spacing in Dual EOM Comb Spectroscopy. In Conference on Lasers and Electro-Optics (2019), paper SF1I.3 (Optical Society of America, 2019) p. SF1I.3.
Xu, B., Fan, X., Wang, S., He. Real-time spectral interleaved electro-optic dual-comb spectroscopy. Tech. Rep. iSSN: 2693-5015 Type: article (2021).
Doerr, C. R. Silicon photonic integration in telecommunications. Front. Phys. 3, 37 (2015).
Isono, H. Latest standardization trend for leading edge high-speed optical transceivers. In Metro and Data Center Optical Networks and Short-Reach Links IV, Vol. 11712 (International Society for Optics and Photonics, 2021) p. 1171209.
Moss, D. J., Morandotti, R., Gaeta, A. L. & Lipson, M. New cmos-compatible platforms based on silicon nitride and hydex for nonlinear optics. Nat. photonics 7, 597–607 (2013).
Herr, T. et al. Temporal solitons in optical microresonators. Nat. Photonics 8, 145–152 (2014).
Gao, S., O’Sullivan, M. & Hui, R. Complex-optical-field lidar system for range and vector velocity measurement. Opt. express 20, 25867–25875 (2012).
Derr, F. Optical qpsk transmission system with novel digital receiver concept. Electron. Lett. 27, 2177–2179 (1991).
Kikuchi, K. Fundamentals of coherent optical fiber communications. J. Lightwave Technol. 34, 157–179 (2015).
Karpov, M. et al. Raman self-frequency shift of dissipative kerr solitons in an optical microresonator. Phys. Rev. Lett. 116, 1–5 (2016).
Yi, X., Yang, Q.-F., Yang, K. Y. & Vahala, K. Theory and measurement of the soliton self-frequency shift and efficiency in optical microcavities. Opt. Lett. 41, 3419–3422 (2016).
Brasch, V. et al. Photonic chip–based optical frequency comb using soliton cherenkov radiation. Science 351, 357–360 (2016).
Yi, X. et al. Single-mode dispersive waves and soliton microcomb dynamics. Nat. Commun. 8, 1–9 (2017).
Suh, M.-G. & Vahala, K. Gigahertz-repetition-rate soliton microcombs. Optica 5, 65–66 (2018).
Liu, J. et al. Photonic microwave generation in the X-and K-band using integrated soliton microcombs. Nat. Photon. 14, 486–491 (2020).
Xiang, C. et al. Laser soliton microcombs heterogeneously integrated on silicon. Science 373, 99–103 (2021).
Lihachev, G. et al. Ultralow-noise frequency-agile photonic integrated lasers. arXiv preprint arXiv:2104.02990 (2021).
de Beeck, C. O. et al. Heterogeneous iii-v on silicon nitride amplifiers and lasers via microtransfer printing. Optica 7, 386–393 (2020).
Vallaitis, T. et al. Quantum dot SOA input power dynamic range improvement for differential-phase encoded signals. Opt. Express 18, 6270–6276 (2010).
Juodawlkis, P. W. et al. Packaged 1.5-um Quantum-Well SOA With 0.8-W Output Power and 5.5-dB Noise Figure. IEEE Photonics Technol. Lett. 21, 1208–1210 (2009).
Huang, X. et al. Optimized Quantum-Well Semiconductor Optical Amplifier for RZ-DPSK Signal Regeneration. IEEE J. Quantum Electron. 47, 819–826 (2011).
Newbury, N. R., Coddington, I. & Swann, W. Sensitivity of coherent dual-comb spectroscopy. Opt. express 18, 7929–7945 (2010).
Liu, J. et al. Monolithic piezoelectric control of soliton microcombs. Nature 583, 385–390 (2020).
Dual chirped microcomb based parallel ranging at megapixel-line rates data and code dataset. https://doi.org/10.5281/zenodo.5898523.
Acknowledgements
This material is based upon work supported by the Air Force Office of Scientific Research (AFOSR) under Award No. FA9550-19-1-0250. J.R. acknowledges support from the Swiss National Science Foundation (SNSF) through an Ambizione grant (201923). The authors thank Jeremie Renaudier of Nokia Bell labs for valuable suggestions. The Si3N4 samples were fabricated in the EPFL Center of MicroNanoTechnology (CMi).
Author information
Authors and Affiliations
Contributions
A.L. and J.R. conducted the various experiments and analyzed the data. A.L. designed the samples. J.L. fabricated the samples. All authors discussed the manuscript. A.L., J.R., M.K. and T.J.K. wrote the manuscript. T.J.K. supervised the work.
Corresponding authors
Ethics declarations
Competing interests
T.J.K. is a co-founder and shareholder of LiGenTec SA, a start-up company that is engaged in making Si3N4 nonlinear photonic chips available via foundry service.
Peer review
Peer review information
Nature Communications the other anonymous reviewer(s) for their contribution to the peer review of this work. Peer review reports are available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Lukashchuk, A., Riemensberger, J., Karpov, M. et al. Dual chirped microcomb based parallel ranging at megapixel-line rates. Nat Commun 13, 3280 (2022). https://doi.org/10.1038/s41467-022-30542-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-022-30542-x
This article is cited by
-
Spatio-spectral 4D coherent ranging using a flutter-wavelength-swept laser
Nature Communications (2024)
-
Breaking the temporal and frequency congestion of LiDAR by parallel chaos
Nature Photonics (2023)
-
Quiet point engineering for low-noise microwave generation with soliton microcombs
Communications Physics (2023)
-
Chaotic microcomb-based parallel ranging
Nature Photonics (2023)
-
Entanglement-enhanced dual-comb spectroscopy
npj Quantum Information (2023)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
