
Abstract
Spintronics and magnetic materials exhibit many physical phenomena that are promising for implementing neuromorphic computing natively in hardware. Here, we review the current state-of-the-art, focusing on the areas of spintronic synapses, neurons, and neural networks. Many current implementations are based on the paradigm of reservoir computing, where the details of the network do not need to be known but where significant post-processing is needed. Benchmarks are given where possible. We discuss the scientific and technological advances needed to bring about spintronic neuromorphic computing that could be useful to an end-user in the medium term.
Similar content being viewed by others

Introduction
Artificial Intelligence (AI) is a 21st-century general purpose technology (GPT) that will have ramifications for every aspect of society, which will be as great as those for the most important GPT of the 20th century, the digital computer. AI can tackle classes of problems that conventional algorithms find difficult to deal with by using, typically, a brain-inspired form of algorithm known as a neural network. Nevertheless, most current neural networks are inefficiently simulated on digital von Neumann computers resulting in power consumption several orders of magnitude greater than biological systems of equivalent computing power. We can therefore expect that dramatic reductions in power consumption can be realised if it becomes possible to build hardware that operates in a neuromorphic manner natively, at the level of the device physics.
Nanomagnetism and spintronics possess a variety of intrinsic features that offer promise for this type of neuromorphic computing. These include non-linearity, hysteresis, phase transitions, collective behaviour, and non-volatility for compute-in-memory. The field has recently been reviewed by Grollier et al.1 and Zhou and Chen2, whilst spintronics has been compared to other approaches to neuromorphic computing using quantum materials by Hoffmann et al.3.
In a neural network, synapses form connections between neurons. The synaptic weight represents the strength of the connection, neurons sum the weighted input signals, apply a non-linear transformation, and pass the result to the output synapses. In the following, we review the current status of the way that spintronic materials and devices have been used to construct these building blocks, before considering the way that these are just beginning to be combined to form all-spintronic neural networks. We also consider the most popular current approach to performing a spintronic neuromorphic computation, the reservoir computer, before offering some perspectives on possible future developments.
Current status
Spintronic synapses
Artificial synapses in neural networks not only store analogue information (i.e., they act as a memory) but also have the ability to update their status given new information (i.e., a synaptic weight may be modified, and thus they may be used for learning within the network).
Using the existing technology of the magnetic tunnel junction (MTJ) memory cell is one route to storing synaptic weights, and can be shown to have significant advantages for the speed and power requirements of associative memory devices. For example, Jarollahi et al. fabricated a search engine using an MTJ-based logic-in-memory architecture4. The chip reduced memory requirements by a factor of 13.6 and energy consumption by 89%, compared with a non-neural hardware-based search architecture. The number of clock cycles in performing search operations with this chip was also reduced by a factor of 8.6 compared to content-addressable memories, and by 5 orders of magnitude compared with a search engine based on a traditional processor. Meanwhile, Ma et al. fabricated an associative processor based on a 4-processor/2-MTJ spin-transfer torque-magnetic random access memory (STT-MRAM)5. They also drastically reduced power consumption by up to 90% compared to current associative memories. As STT-MRAM is already on the market, the first contributions of spintronics to neuromorphic chips will probably be based on digital magnetic memories combined with CMOS circuitry.
However, MTJs have two states, while synaptic weights in neural networks are typically real-valued. This means that many binary MTJs are needed to store a single synaptic weight, and so in order to reduce device footprint and power consumption the next step is to find a suitable analogue storage element that individually emulates a synapse in a neuromorphic network. These elements are referred to as memristors and were introduced theoretically by Chua in the 1970s6. Experimentally, the field was revitalised in 2008 by Strukov et al. who investigated TiO2 nanodevices sandwiched between Pt electrodes7. Since then, various materials have been used to develop memristive devices. Magnetic devices can function as memristors by storing analogue information in magnetic textures. For example, Wang et al. proposed a spintronic memristor based on the displacement of a magnetic domain wall in a spin-valve8, giving rise to lower or higher resistance states depending on the domain wall position. Chanthbouala et al.9 and Lequeux et al.10 experimentally demonstrated memristive functionality through domain wall motion in MTJs (Fig. 1a, b), and an artificial synapse based on a 3-terminal MTJ was reviewed by Sengupta and Roy11. Huang et al. simulated another concept for a spintronic memristor, based on representing analogue information in the number of magnetic skyrmions (Fig. 1c–e)12. Wadley et al. demonstrated analogue-like operation in antiferromagnetic CuMnAs spintronic devices13, using current-induced control of the Néel vector in submicron-scale antiferromagnetic domains. Fukami et al. used spin-orbit torque switching to control a memristive element in an antiferromagnet-ferromagnet bilayer system14. The memristive behaviour comes from the variation in the switching currents among the small magnetic domains that have varying exchange-bias magnitudes and directions at the antiferromagnet-ferromagnet interface.

a Typical resistance versus voltage cycle characteristic of a memristor. Inset: a sketch of a biological synapse. b Side view: Schematic of an MgO-based magnetic tunnel junction with a domain wall in the FeB free layer. Δ is the width of the domain wall. Top view: Scanning electron microscope image of the sample, with a black dashed line to emphasise its contour. From ref. 10. c Sketch of a proposed skyrmionic synaptic device. To mimic a neuromodulator, as shown in d, a bidirectional learning stimulus flowing through the heavy metal from terminal A to terminal B (or vice versa) drives skyrmions into (or out of) the postsynapse region to increase (or decrease) the synaptic weight, as shown in e, mimicking the potentiation/depression process of a biological synapse. From ref. 12.
The non-volatility of spintronic memristors allows them to combine learning and memory—the two key features of neuromorphic computing synapses. What is more, they have the potential for very high endurance, allowing many learning cycles. A significant challenge for spintronic memristors is scaling: that is, maintaining the analogue behaviour with reduced device dimensions. Temple et al.15 recently made progress in this direction by demonstrating memristor-like behaviour in a 500 nm-diameter FeRh pillar, with the prospect of scaling to smaller diameters accompanied by improved memristive properties, such as larger read-out signal and smaller drive current. Progress continues to be made by combining a magnetic domain wall with an MTJ to form a multi-weight artificial synapse16.
Spintronic neurons
Spintronic neurons utilise magnetic interactions to create signal processors that mimic the LIF (Leaky-Integrate-and-Fire) model of the biological neuron17. A number of nanoscale designs exist which mimic this behaviour more or less closely and with a range of different advantages. In general, spintronic neurons store information about the history of current spikes applied at one or more inputs in the form of a dynamic magnetic state, Fig. 2a. Between these spikes, the system slowly decays back to its initial state. If enough current spikes are applied to the inputs within a given time frame, the system overcomes an internal energy barrier and “fires”, undergoing a transient phase change such as a magnetic reversal and producing an output signal before returning to its initial state. This behaviour can be understood as a non-linear oscillator, in which a constant rate of input spikes will produce periodic output spikes by exploiting the particular dynamic behaviours in the system18. There are two main approaches to mimicking this type of oscillator in a magnetic system: magnetisation dynamics and domain-wall/skyrmion oscillators1.

a Schematic of a LIF model of the neuron adapted from ref. 63, showing how weighted input signals are integrated into the neuron until the internal state passes a threshold. In the biological neuron and most synthetic neuron designs, this internal state is related to an electrical potential, but in the spintronic neuron, it is typically a magnetic state. The output signal comprises a series of spikes that occur when the internal state passes its threshold. b Spintronic neuron based on manipulating skyrmions adapted from ref. 23. The inset shows the total energy of the skyrmion as a function of its position in the shaped channel, showing how it decays back to its initial state if not driven by a current. c Sketch of the predicted relationship between current pulses (blue) and the position of the skyrmion (red) in the device. d Domain Wall MTJ neuron from ref. 24 with e SEM image of a lithographically prepared device, showing scale and contact layout.
Magnetisation dynamics-based neurons involve creating a magnetic state which is metastable and disturbing the state with an input, such as a current or microwave pulse. With a sufficient number of input spikes, the magnetic state may flip into another metastable state owing to, for example, spin-orbit torque acting on a system with weak perpendicular magnetic anisotropy19,20. Other examples of this approach include the use of spin-torque nano-oscillators, which can be coupled in large arrays to perform reservoir computing. Applying a current pulse to one of these oscillators can cause the period of its oscillation to change before slowly relaxing back to the initial state21.
Domain-wall/skyrmion oscillators use a current to push a domain wall or skyrmion through a nanomagnetic element using spin-torque effects, in a manner similar to the racetrack memory concept proposed by Parkin1,22. The artificial neuron can be shaped to create restrictions and chambers that present barriers to the motion of magnetic solitons such as the design presented in Fig. 2b. The accumulation of, for example, skyrmions in a magnetic chamber, or the driving of a skyrmion over a magnetic restriction have been shown to accurately mimic the LIF model of the biological neuron23. For example, a skyrmion interacting with the edges of a narrowing nanowire can experience a force pushing them back against the current direction, allowing its position to act as a leaky integral, Fig. 2c23.
The challenge for all-spintronic neuron concepts is an efficient read-out of the “fire” spike. In most designs, the fire state involves a change in magnetisation state that can potentially be read using a magnetic tunnel junction, Fig. 2d, e. Recent designs utilise a simple bar design containing a single domain wall that can pass under a vertical MTJ24. Such devices are capable of simulating a spiking neural network (SNN) in a monolithic, binary device, which significantly reduces the complexity and scale compared to a multi-weighted device.
Spintronic reservoir computing
Magnetic systems possess all the requirements for reservoir computing (RC) (Fig. 3a): a system of interacting non-linear entities that are capable of storing a state. Magnetic systems are inherently non-linear and can easily be used to store states as has been done for decades for magnetic memories. Magnetic interactions at different length scales (exchange interaction—nanometre length scales, dipole interaction—micrometre lengthscale) can couple magnetic entities into a network. Magnetic systems that have been suggested for use in spintronic reservoir computing include spin-torque oscillators, artificial spin ices, spin waves, and spin textures such as skyrmions and domain walls25. Allwood et al. provide a very recent review of the underlying principles and implementations in magnetic systems26. They point out that many of the recent papers are simulations, which has led to a large diversity of suggested approaches (because almost any magnetic system can be a reservoir). However, there are an increasing number of experimental demonstrations.

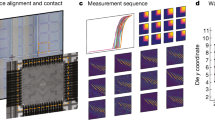
a Reservoir computing takes input signal(s) and processes them into an encoded signal which can stimulate non-linear dynamics in the reservoir. Some macroscopic properties of the reservoir are then measured (without measuring the microscopic dynamics, which are treated as a black box) and these measurements are weighted to give the final output. b Magnetic imaging of the changing state of nano-islands in an artificial spin ice due to non-linear dynamics with magnetic applied field (reproduced from ref. 64 under Creative Commons Attribution 4.0 International License). c Simulated spin wave reservoir forming a perceptron layer of a neural network (reproduced from ref. 33 under Creative Commons Attribution 4.0 International License).
The dynamics (either intrinsic or driven) of different spintronics RC systems enable the creation of systems that can respond to input on drastically different timescales, from megahertz to terahertz. In fact, fast dynamics is not necessarily desirable when processing analogue data, and ideally, the RC should respond on a similar timescale as the input frequencies.
Spin-torque oscillators (STOs) are fundamental spintronic components made by exciting the magnetisation dynamics of an MTJ, leading to oscillations in the resistance. RC can be realised through time multiplexing on a single STO21 or as arrays of coupled STOs27. STO RC has performed tasks such as spoken digit recognition with recognition rates as high as state-of-the-art neural networks, benchmarked at 99.6% on the NIST TI-46 data corpus for the time-multiplexed case21. STOs are naturally sensitive to external magnetic fields. This can either be seen as a hindrance (device interference) or a feature, enabling the coupling within arrays and the ability to tune behaviour. As STO RC computing is based on MTJs, the fundamental component of magnetic random access memories, it is already CMOS compatible and could be manufactured on a large scale.
Artificial spin ices (ASIs) are lattices of magnetic islands that interact by the magnetic dipole interaction or exchange interaction. Changing the state of one island strongly affects the energy landscape of other nearby islands, leading to a highly degenerate system. It has long been known that spin ices map directly onto the Little28 or Hopfield29 models of associative memory30; however, the connectivity of the islands is determined by the geometry, so training the weights amounts to redefining the physical layout of the islands. Rather than microscopically tuned Hopfield memories, ASIs have recently been used to create RCs (Fig. 3b), with the advantage that only the outputs need to be weighted, which can be done in software. Careful selection of the island shapes allows for more than two states, providing denser processing and memory31. The devices work in the frequency domain; an input microwave signal drives the ASI and the output is read by measuring a fingerprint of the system’s magnetic resonances32. Again, ASIs are susceptible to external magnetic fields with the same dual nature (tunability/interference) as STO RCs. Temperature can also affect ASIs and above a certain threshold will also lead to loss of information.
On nanometre to micrometre scales, spin waves can propagate in a magnetic material similar to waves on the surface of the water. Their dynamics are intrinsically non-linear due to the magnetic ‘demagnetising’ field and anisotropic terms, and can be tuned globally or locally using magnetic fields. RC computing using spin waves has been proposed in magnetic insulators with an array of magnetic islands (likely MTJs) that can be altered to adjust the network weights33 (Fig. 3c). This approach is a mix of RC and more traditional NNs. The system is driven from one side using a coplanar waveguide, spin waves travel across the magnet, and interact with one another, and the spin wave amplitude at different regions of the opposite side encodes the outputs. Simulations have shown the ability to perform vowel recognition benchmarked at 90–97.5% accuracy for samples available in the Wavetorch package34.
Reservoir systems such as spin-torque nano-oscillator arrays can potentially be read via microwave absorption. The microstate of the total system leads to characteristic microwave or RF absorption bands, which evolve based on the input pulses and coupling between elements. This spectrum can be detected using a coupled waveguide, which can be used for both input and output for a large array of nanomagnets35.
Spin textures such as skyrmions and domain walls that can be moved within magnetic materials to store and transport information can also be used for RC. Particle-like skyrmions36 are a particularly active research field due to their high mobility at low current densities and topological protection which makes them quite robust against perturbations that could destroy them. Simulated skyrmion reservoirs using AC electrical current pulses and electrical anisotropic magnetoresistance have been used for pattern recognition, showing the potential for integration with existing electronic CMOS devices37,38,39. Magnetic nanoring arrays driven by rotating magnetic fields can provide non-linear domain wall behaviour and simulations are able to classify spoken digits benchmarked at close to 100% accuracy40. Skyrmions have been shown to be superior to magnetic domains for waveform recognition, owing to the absence of creep effects41. Task-adaptive approaches to reservoir computing using skyrmions have been demonstrated by retuning to different points in the phase diagram of a skyrmion-bearing crystal42. These RCs are similar to ASI concepts and suffer from the same weakness of requiring magnetic fields to drive the system.
Spintronic neural networks
While an RC is a complete neural network, an important part of it is in the post-processing software, rather than intrinsically in the hardware. An important recent breakthrough is to build a complete neural network from MTJs, in which these devices operate as both synapses and neurons43. The MTJs operate as spin-torque oscillators and implement many-to-many connectivity through RF emission and detection. This approach was benchmarked at 91.52% accuracy on the MNIST image set, but the main goal was to show the possibility of being able to identify drones based on their RF transmissions while consuming only mW of power.
Current and future challenges
Large-scale synaptic connectivity is one of the key difficulties in building a spintronic neuromorphic computer. If the system is built of individual neuron-like devices then the same issues arise as in as ‘conventional’ silicon-based neuromorphic computing: neurons must be connected through a software network or a hardware topology that will be very limited due to the need to physically wire the neurons together. Microwave connection between components is the leading solution at the moment35,43.
Spintronic neuromorphic devices built of ferromagnetic materials will always be sensitive to magnetic fields as these will alter the dynamics and energy landscape of the device elements. Some paradigms may be more sensitive than others (for example ASIs can be quite sensitive31) but MTJs are already used as commercial memory devices in the real world. Antiferromagnetic spintronics may supply a solution. Antiferromagnetic materials are insensitive to even very large magnetic fields whilst having many properties suitable for neuromorphic computing44. The newly discovered class of altermagnetic materials45, which combine antiferromagnetic properties in real space with ferromagnetic properties in electron k-space, may offer ways to circumvent these issues.
All magnetic materials have a critical temperature above which they become paramagnetic and lose their magnetic order. This means that any spintronic device will be inoperable above this temperature, however, many magnetic materials have critical temperatures well above room temperature (Fe: 770 °C, Co: 1127 °C, FeRh: 400 °C). More challenging is that at elevated temperatures magnetic systems have a higher probability of flipping between bistable states, losing information. Materials can be used that are more stable against this thermal flipping (higher magnetic anisotropy) but then the energy needed to manipulate the magnetic elements increases. As in magnetic recording, this will always be a compromise. On the other hand, the stochastic thermal switching of MTJs has been used for probabilistic computing46.
For the foreseeable future, spintronic devices must be coupled with electronic devices. Ideally, spintronic elements or devices should be integrated directly into the backend of the CMOS fabrication process. This is now done for MTJs but could require significant efforts for other spintronic systems. Most experimentally proven spintronic neuromorphic concepts currently require large peripheral equipment, for example, to generate and analyse microwaves, since they have taken the form of laboratory demonstrations. It will be a challenge to miniaturise and implement these approaches on-chip.
There are competing technologies also trying to implement neuromorphic computing which may make progress more quickly than spintronic methods. For example, a group at Tsinghua University has built a fully integrated reservoir computer from TiOx memristors and shown improved power efficiency for a range of tasks47. Because the entire system is based on electronic components there are no challenges in the integration and miniaturisation of the concept. However, the oxide memristors will suffer from the well-known issues with longevity48.
Advances in science and technology needed
One of the primary obstacles to developing viable neuromorphic spintronic devices is the ability to reliably read-out magnetic information on-chip1. The principal method for measuring a magnetic state is to take advantage of magnetoresistance, the tendency of magnetic materials to change their electrical resistance in response to changes in their magnetic state. There is a wide range of magnetoresistive effects that might be used, but those that produce the largest signal-to-noise ratio are giant magnetoresistance (GMR) and tunnelling magnetoresistance (TMR)49. Both of these approaches involve creating multilayers of magnetic and non-magnetic materials with thicknesses of the order of a few nm to a few 10s of nm. However, magnetoresistance ratios are often in the range of a few 10%. Only MgO-based MTJs offer ratios of a few hundred %50,51. These comparatively small signals can lead to a high error rate at high frequencies. An approach to solving this is to pursue electronic integration, where collections of MTJs are connected to CMOS transistors that collect an average signal across an array.
In the case of ASI reservoir memories, electrical integration may be more complicated. The “brute force” solution would be to attach an individual sensor to every element in the array. However, this would be challenging both in terms of lithography and in terms of signal strength. More realistic architectures involve recording the collective state of the ASI in a manner that can be integrated on-chip. A common approach is to use spin wave dynamics, either via an RF waveguide patterned beneath the ASI or by measuring spin waves in a continuous magnetic layer52.
A further material constraint is the stochastic nature of magnetic reversals. While this can be an advantage in using magnetic devices in neural networks, the highly asymmetric and non-linear behaviour of many magnetic materials can create problems for certain neuromorphic algorithms, particularly those that rely on back propagation53. This issue can, to some extent, be controlled by miniaturising magnetic elements to reduce the number of, for example, grain boundaries and impurities that might cause variations across a magnetic element54. Doing so requires shrinking domain walls and/or skyrmions to a few nm by engineering spin-orbit interactions in multilayers.
Gaining greater control over spin-orbit interactions will also be vital for improved electrical integration. Spin-orbit interactions are also responsible for spin-transfer-torques which allow electrical currents to drive domain wall and skyrmion motion and can be used to convert between spin and electrical currents in magnetic devices55. Integration of materials that have extremely high spin-orbit coupling or intrinsic spin filtering effects such as topological insulators may be a route towards energy efficient electrical integration with spintronics56.
An alternative to electronic integration is to integrate spintronic devices with photonics. This relies on interactions between polarised light and spin states in materials such as magnetic ceramics, metallic thin films and magnetic semiconductors. All optical writing methods use timed femtosecond pulses to cause spin rotations in magnetic oxide films, while laser writing of skyrmions or domain walls is possible by creating local heating in a small ambient field57,58. Emission from magnetic oscillators is typically in the THz region. THz emissions can be used to couple large arrays of spin-torque nano-oscillators for reservoir memory applications or can be used to couple arrays of skymrions21. Using devices that convert between optical and THz devices, such as plasmonic transducers and nano-cavities, could offer opportunities to both read and write spintronic memories with photonic components59.
Conclusions
Spintronics offers immense potential for natively neuromorphic hardware, given that it relies on magnetic materials that show a variety of relevant physical phenomena, such as non-volatility, non-linearity, and hysteresis. Phase transitions between different magnetic phases can also be exploited. Moreover, magnetic materials are inherently radiation-hard, making them suitable for a variety of harsh environments.
Neuromorphic spintronics is still at a very low TRL, with most examples based on laboratory-built setups rather than commercial hardware. There are many approaches proven in the literature at the device level such as memristors to store synaptic weights or neuron-like devices that display LIF behaviour. At the system level, there are several examples of a system that can be operated as a reservoir computer to perform pattern recognition tasks, as well as a complete network based on wireless RF interconnections, as we have described above. There are also two examples of commercial MRAM chips being re-purposed to perform compute-in-memory pattern recognition tasks. We are aware of a report by a US Air Force-sponsored team at Princeton60 who have demonstrated a chip-generalised one-time neural-network training algorithm using MRAM-based in-memory-computing, with CIFAR-10 image-classification accuracy benchmarked at 90.1%. There is also a report of a joint Samsung/Harvard team61 who have re-purposed advanced-node 22nm fully depleted-silicon on insulator MRAM arrays from GlobalFoundries to perform MNIST image recognition by using current summation for analogue multiply-accumulate operations in 64 × 64 crossbar array based on MRAM cells, benchmarked at 98.86% accuracy at recognising MNIST images when emulating an eight-layer Visual Geometry Group-8 neural network.
Otherwise, work is still far from the marketplace. Nevertheless, there are huge advantages for native neuromorphic computing for neural network-type algorithms in AI, in terms energy-efficiency, speed, and deployability in small off-network edge devices, over continuing to simulate these networks in silico. Spintronics possesses clear strengths in write energy, write speed, endurance, and stochasticity over other resistive switching materials platforms for information processing62. Moreover, spintronics is proven in the marketplace to be compatible with CMOS, in the form of MTJ-based MRAM, giving a clear pathway to manufacturability for spintronic concepts in neuromorphic computing. These considerations are driving the upsurge in research amongst spintronics researchers that we have reviewed here, and will continue to propel this field forward in the future.
Data availability
No datasets were generated or analysed during the current study.
References
Grollier, J. et al. Neuromorphic spintronics. Nat. Electron. 3, 360–370 (2020).
Zhou, J. & Chen, J. Prospect of spintronics in neuromorphic computing. Adv. Electron. Mater. 7 https://doi.org/10.1002/aelm.202100465 (2021).
Hoffmann, A. et al. Quantum materials for energy-efficient neuromorphic computing: opportunities and challenges. APL Mater. 10 https://doi.org/10.1063/5.0094205 (2022).
Jarollahi, H. et al. A nonvolatile associative memory-based context-driven search engine using 90 nm CMOS MTJ-hybrid logic-in-memory architecture. IEEE J. Emerg. Sel. Top. Circuits Syst. 4, 460–474 (2014).
Ma, Y. et al. A 600-μW ultra-low-power associative processor for image pattern recognition employing magnetic tunnel junction-based nonvolatile memories with autonomic intelligent power-gating scheme. Jpn. J. Appl. Phys. 55, 04EF15 (2016).
Chua, L. O. Memristor -the missing circuit element. IEEE Trans. Circ. Theory 18, 507–519 (1971).
Strukov, D. B., Snider, G. S., Stewart, D. R. & Williams, R. S. The missing memristor found. Nature 453, 80–83 (2008).
Wang, X., Chen, Y., Xi, H., Li, H. & Dimitrov, D. Spintronic memristor through spin-torque-induced magnetization motion. IEEE Electron Device Lett. 30, 294–297 (2009).
Chanthbouala, A. et al. Vertical-current-induced domain-wall motion in MgO-based magnetic tunnel junctions with low current densities. Nat. Phys. 7, 626–630 (2011).
Lequeux, S. et al. A magnetic synapse: multilevel spin-torque memristor with perpendicular anisotropy. Sci. Rep. 6, 31510 (2016).
Sengupta, A. & Roy, K. Encoding neural and synaptic functionalities in electron spin: a pathway to efficient neuromorphic computing. Appl. Phys. Rev. 4, 041105 (2017).
Huang, Y., Kang, W., Zhang, X., Zhou, Y. & Zhao, W. Magnetic skyrmion-based synaptic devices. Nanotechnology 28, 08LT02 (2017).
Wadley, P. et al. Electrical switching of an antiferromagnet. Science 351, 587–590 (2016).
Fukami, S., Zhang, C., DuttaGupta, S., Kurenkov, A. & Ohno, H. Magnetization switching by spin-orbit torque in an antiferromagnet-ferromagnet bilayer system. Nat. Mater. 15, 535–541 (2016).
Temple, R. C. et al. Phase domain boundary motion and memristance in gradient-doped FeRh nanopillars induced by spin injection. Appl. Phys. Lett. 118 https://doi.org/10.1063/5.0038950 (2021).
Leonard, T. et al. Shape-dependent multi-weight magnetic artificial synapses for neuromorphic computing. Adv. Electron. Mater. 8, 2200563 (2022).
Lansky, P., Sanda, P. & He, J. The parameters of the stochastic leaky integrate-and-fire neuronal model. J. Comput. Neurosci. 21, 211–223 (2006).
Hoppensteadt, F. C. & Izhikevich, E. M. Oscillatory neurocomputers with dynamic connectivity. Phys. Rev. Lett. 82, 2983–2986 (1999).
Yang, Q. et al. Spintronic integrate-fire-reset neuron with stochasticity for neuromorphic computing. Nano Lett. 22, 8437–8444 (2022).
Cai, J. et al. Voltage-controlled spintronic stochastic neuron based on a magnetic tunnel junction. Phys. Rev. Appl. 11, 034015 (2019).
Torrejon, J. et al. Neuromorphic computing with nanoscale spintronic oscillators. Nature 547, 428–431 (2017).
Parkin, S. & Yang, S.-H. Memory on the racetrack. Nat. Nanotechnol. 10, 195–198 (2015).
Chen, X. et al. A compact skyrmionic leaky-integrate-fire spiking neuron device. Nanoscale 10, 6139–6146 (2018).
Leonard, T., Liu, S., Jin, H. & Incorvia, J. A. C. Stochastic domain wall-magnetic tunnel junction artificial neurons for noise-resilient spiking neural networks. Appl. Phys. Lett. 122, 262406 (2023).
Everschor-Sitte, K., Majumdar, A., Wolk, K. & Meier, D. Novel implementations for reservoir computing—from spin to charge. https://doi.org/10.48550/arXiv.2311.11929 (2023).
Allwood, D. A. et al. A perspective on physical reservoir computing with nanomagnetic devices. Appl. Phys. Lett. 122. https://doi.org/10.1063/5.0119040 (2023).
Houshang, A. et al. Spin-wave-beam driven synchronization of nanocontact spin-torque oscillators. Nat. Nanotechnol. 11, 280–286 (2015).
Little, W. & Shaw, G. L. Analytic study of the memory storage capacity of a neural network. Math. Biosci. 39, 281–290 (1978).
Hopfield, J. J. Neural networks and physical systems with emergent collective computational abilities. Proc. Natl. Acad. Sci. USA 79, 2554–2558 (1982).
Müller, B. & Reinhardt, J. Neural Networks: An Introduction (Springer-Verlang, Berlin Heidelberg, 1990).
Gartside, J. C. et al. Reconfigurable training and reservoir computing in an artificial spin-vortex ice via spin-wave fingerprinting. Nat. Nanotechnol. 17, 460–469 (2022).
Vanstone, A. et al. Spectral fingerprinting: microstate readout via remanence ferromagnetic resonance in artificial spin ice. New J. Phys. 24, 043017 (2022).
Papp, Á., Porod, W. & Csaba, G. Nanoscale neural network using non-linear spin-wave interference. Nat. Commun. 12, 6422 (2021).
Williamson, I. Wavetorch. https://github.com/fancompute/wavetorch (2020).
Marković, D., Mizrahi, A., Querlioz, D. & Grollier, J. Physics for neuromorphic computing. Nat. Rev. Phys. 2, 499–510 (2020).
Fert, A., Reyren, N. & Cros, V. Magnetic skyrmions: advances in physics and potential applications. Nat. Rev. Mater. 2, 17031 (2017).
Bourianoff, G., Pinna, D., Sitte, M. & Everschor-Sitte, K. Potential implementation of reservoir computing models based on magnetic skyrmions. AIP Adv. 8, 055602 (2018).
Pinna, D., Bourianoff, G. & Everschor-Sitte, K. Reservoir computing with random skyrmion textures. Phys. Rev. Appl. 14, 054020 (2020).
Msiska, R., Love, J., Mulkers, J., Leliaert, J. & Everschor-Sitte, K. Audio classification with skyrmion reservoirs. Adv. Intell. Syst. 5, 2200388 (2023).
Dawidek, R. W. et al. Dynamically driven emergence in a nanomagnetic system. Adv. Funct. Mater. 31, 2008389 (2021).
Yokouchi, T. et al. Pattern recognition with neuromorphic computing using magnetic field-induced dynamics of skyrmions. Science Adv. 8, eabq5652 (2022).
Lee, O. et al. Task-adaptive physical reservoir computing. Nat. Mater. advance online publication https://doi.org/10.1038/s41563-023-01698-8 (2023).
Ross, A. et al. Multilayer spintronic neural networks with radio-frequency connections. https://doi.org/10.48550/arXiv.2211.03659 (2022).
Kurenkov, A., Fukami, S. & Ohno, H. Neuromorphic computing with antiferromagnetic spintronics. J. Appl. Phys. 128 https://doi.org/10.1063/5.0009482 (2020).
Šmejkal, L., Sinova, J. & Jungwirth, T. Emerging research landscape of altermagnetism. Phys. Rev. X 12, 040501 (2022).
Borders, W. A. et al. Integer factorization using stochastic magnetic tunnel junctions. Nature 573, 390–393 (2019).
Zhong, Y. et al. A memristor-based analogue reservoir computing system for real-time and power-efficient signal processing. Nat. Electron. 5, 672–681 (2022).
Pouyan, P., Amat, E. & Rubio, A. Statistical lifetime analysis of memristive crossbar matrix. In: 2015 10th International Conference on Design & Technology of Integrated Systems in Nanoscale Era (DTIS). https://doi.org/10.1109/dtis.2015.7127378 (IEEE, 2015).
Zabel, H. Progress in spintronics. Superlattices Microstruct. 46, 541–553 (2009).
Yuasa, S., Nagahama, T., Fukushima, A., Suzuki, Y. & Ando, K. Giant room-temperature magnetoresistance in single-crystal Fe/MgO/Fe magnetic tunnel junctions. Nat. Mater. 3, 868–871 (2004).
Parkin, S. S. P. et al. Giant tunnelling magnetoresistance at room temperature with MgO (100) tunnel barriers. Nat. Mater 3, 862–867 (2004).
Skjærvø, S. H., Marrows, C. H., Stamps, R. L. & Heyderman, L. J. Advances in artificial spin ice. Nat. Rev. Phys. 2, 13–28 (2019).
Ambrogio, S. et al. Equivalent-accuracy accelerated neural-network training using analogue memory. Nature 558, 60–67 (2018).
Nagaosa, N. & Tokura, Y. Topological properties and dynamics of magnetic skyrmions. Nat. Nanotechnol. 8, 899–911 (2013).
Ralph, D. & Stiles, M. Spin transfer torques. J. Magn. Magn. Mater. 320, 1190–1216 (2008).
Mellnik, A. R. et al. Spin-transfer torque generated by a topological insulator. Nature 511, 449–451 (2014).
Lalieu, M. L. M., Lavrijsen, R. & Koopmans, B. Integrating all-optical switching with spintronics. Nat. Commun. 10, 110 (2019).
Berruto, G. et al. Laser-induced Skyrmion writing and erasing in an ultrafast cryo-lorentz transmission electron microscope. Phys. Rev. Lett. 120, 117201 (2018).
Uchida, K. et al. Generation of spin currents by surface plasmon resonance. Nat. Commun. 6, 5910 (2015).
Deaville, P., Zhang, B., Chen, L.-Y. & Verma, N. A maximally row-parallel MRAM in-memory-computing macro addressing readout circuit sensitivity and area. In: ESSCIRC 2021—IEEE 47th European Solid State Circuits Conference (ESSCIRC). https://doi.org/10.1109/ESSCIRC53450.2021.9567807 (IEEE, 2021).
Jung, S. et al. A crossbar array of magnetoresistive memory devices for in-memory computing. Nature 601, 211–216 (2022).
Wang, Z. et al. Resistive switching materials for information processing. Nat. Rev. Mater. 5, 173–195 (2020).
Lee, C., Sarwar, S. S., Panda, P., Srinivasan, G. & Roy, K. Enabling spike-based backpropagation for training deep neural network architectures. Front. Neurosci. 14, 119 (2020).
Gartside, J. C. et al. Reconfigurable magnonic mode-hybridisation and spectral control in a bicomponent artificial spin ice. Nat. Commun. 12, 2488 (2021).
Acknowledgements
This work was supported by QinetiQ, the Royal Society, and the Royal Academy of Engineering.
Author information
Authors and Affiliations
Contributions
C.H.M.: writing—original draft, writing—review & editing, funding acquisition; J.B.: writing—original draft, writing—review & editing; T.A.M.: writing—original draft, writing—review & editing; T.M.: writing—original draft, writing—review & editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Marrows, C.H., Barker, J., Moore, T.A. et al. Neuromorphic computing with spintronics. npj Spintronics 2, 12 (2024). https://doi.org/10.1038/s44306-024-00019-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s44306-024-00019-2
