
Abstract
Poor coverage of the Antarctic continental shelf bathymetry impedes understanding the oceanographic processes affecting Antarctica’s role in global climate. Continental shelf bathymetry influences warm modified Circumpolar Deep Water movement onto the shelf, making it an important factor promoting ice shelf melting and influencing the flow of ice shelves into the ocean. Building on previous work using seal dives to redefine bathymetry, our longitudinal study of ocean physics and animal behaviour provided new depth information from over 500,000 individual seal dives on the East Antarctic continental shelf. About 25% of these seal dives were 220 m (sometimes over 1000 m) deeper than the interpolated seafloor from IBCSO V2. Focusing on four well-sampled regions, we show that the bathymetry of 22% to 60% of the sampled area was improved by incorporating seal dive data. This revealed new bathymetric features, including troughs off the Shackleton Ice Shelf and Underwood Glacier and a deep canyon near the Vanderford Glacier. This deep canyon, the Mirounga-Nuyina Canyon, was confirmed by a recent multi-beam echo sounder survey. Further acquisitions of seal data will improve our understanding and modelling of Antarctic coastal ocean processes and ice-sheet dynamics.
Similar content being viewed by others

Introduction
A major obstacle to understanding global oceanographic processes is poor knowledge of seafloor geometry around Antarctica such as for continental shelf bathymetry including under ice shelves, under ice shelf basal topography, and locations of glacier grounding lines1,2,3,4. Accurate bathymetric information is important for both physics and biology, but spatially comprehensive, high-resolution bathymetric data are difficult to obtain from remote regions which are visited infrequently by ships and survey vessels. Despite immense efforts, only 23% of the global seafloor has been mapped accurately, with the remainder inferred from altimetry and other indirect methods4,5. The bathymetry around Antarctica is even less well-known than that globally because of its remoteness and the vast areas that are covered in ice. This leaves considerable areas, including much of the Antarctic continental shelf, largely unsurveyed6. Accurate representation of the bathymetry around Antarctica is especially important given the central role that seafloor topography plays in influencing glacier flow rates and hence loss of ice from Antarctica7. Identifying seafloor depressions and troughs, which provide the pathways for the ingress of warm modified CDW (mCDW)8,9,10,11,12,13 that increases melting rates leading to increased glacier flow rates, is important for understanding global climate regimes through changes in ocean currents and global heat distribution14,15,16.
Recent compilations of bed topography show that large areas of the East Antarctic Ice Sheet are grounded below sea level17, with implications for the stability of East Antarctica’s ice shelves. Ice mass balance studies have shown a loss of ice in this region18,19 and oceanographic evidence documents the melt of East Antarctic ice shelves in three different locations over the past 5 years20. Under intermediate to high CO2 emissions scenarios, there may be increases in fluxes of mCDW towards and under ice shelves21. A recent oceanographic study off East Antarctica (80–160° E)22, indicated that mCDW has warmed along the continental slope by an order of 1–2 °C between 1930 and 2018, increasing the oceanic heat supply to vulnerable ice shelves and possibly increasing ice-mass loss and water mass changes into the future. Given the ice-shelf thinning rates indicated by satellite measurements23,24, accurate bathymetry in Antarctic regions will improve our modelling and understanding of ocean water mass exchanges onto the continental shelf and under ice shelves.
It is unrealistic to expect that all the Antarctic seafloor will be mapped by ship-based surveys in the foreseeable future, and so it is necessary to employ multiple data streams to increase the number of available bathymetric observations e.g.25,26. One valuable source is data collected by diving animals which have already been used to improve bathymetry across the Antarctic Peninsula and Greenland continental shelves27,28. Animals tagged with specialised satellite transmitters are already being used to obtain data on multiple biological and physical characteristics of the world’s oceans, including temperature, salinity and fluorometry29,30. Deep diving animals, particularly benthic feeding seals, equipped with data-loggers also collect dive depth data across vast swathes of the oceans, and these data could be incorporated into existing bathymetric datasets27,28. While promising, there are uncertainties associated with the location estimates for the seals because many bio-loggers, including those used in this study, estimate at-sea locations using system ARGOS31,32 introducing potential mismatches between seal derived depths and locations. However, by taking advantage of the vast number of seal dives and comparing these with existing bathymetry, these data can still: (i) provide new information on the likely minimum depth of the seafloor, (ii) indicate where seal dive depths and reported bathymetry differ, highlighting areas where survey effort may need to be focused33, and (iii) contribute to the development of new Antarctic bathymetric charts based on the integration and synthesis of multiple data sources.33.
Results and discussion
Evaluation of seal dives as a measure of seafloor depth
Conductivity, Temperature and Depth (CTD) casts collected by seals in front of the Vanderford Glacier in Vincennes Bay (66.55° S, 110.25° E) in 2012 were observed to be deeper than the interpolated bathymetry product provided by Bedmap 2.0 in the same area33. A subsequent high-resolution multi-beam survey of the region in 2022 confirmed the presence of a deep submarine canyon. We used dive data from 25 southern elephant seals which visited the area to confirm that seal dives could be used to detect the presence of this canyon. A total of 4089 seal dive profiles occurred within the region of the Vanderford Glacier survey (Fig. 1). Of these dives, 1498 (33.1%) had depths at least 25 m deeper than the IBCSO V2 bathymetry grid (we chose a 25 m minimum difference to account for the depth resolution of the seal tags’ pressure sensors30). The IBCSO V2 bathymetry grid (Fig. 1a) suggested a reasonably gentle slope running downwards from east to west across the survey region (from 200 m to 1000 m depth). This feature is likely a consequence of how the IBCSO V2 product is interpolated across sparse data points. The greatest mismatches between the seal dive depths and the IBCSO V2 interpolations occurred across the front of the Vanderford Glacier where bathymetry was likely to be most variable (Fig. 2a). The new high-resolution multi-beam data indicated a deep canyon (up to 2200 m in depth) running northwest from the Vanderford Glacier front (Fig. 1b). We suggest calling this canyon the Mirounga-Nuyina Canyon in recognition of the role that seals have played in detecting the canyon and the subsequent confirmation and detailed description of the Canyon from the RSV Nuyina multi-beam survey. Seal dives associated with these features, previously identified as deeper than IBCSO V2 grid, were now shallower than the new multi-beam bathymetry (Fig. 1b). The fact that the seal dives did not reach the seafloor at 2200 m is expected as seals rarely dive deeper than ~1200 m34,35. This indicates that the seal data had correctly identified regions where the IBCSO V2 interpolated bathymetry grid values were too shallow (Fig. 1a), suggesting that seal dives could be used similarly elsewhere to provide new bathymetric information.

The differences between the depth of seal dives and the IBCSO V2 depth estimate is illustrated in a, overlaid on the IBCSO V2 bathymetry grid. b Differences between the seal dive depths and the high-resolution multi-beam sonar swath data collected by RSV Nuyina Voyage 2 2021-22 overlaid on the multibeam bathymetry grid. Positive (red) values indicate where seal dives are deeper than the respective bathymetry grids. The black contour lines show the bathymetric data in 400 m intervals.

Orange represents the IBCSO V2 bathymetry grid6 and brown represents the high-resolution swath data collected by RSV Nuyina Voyage 2 2021-22. Panel a is data from seal ct77-182-12, b seal ct77-185-12, c seal ct77-184-12 and d seal ct77-823-12. Detailed maps of the individual tracks are provided in Supplementary Fig. 1.
Importantly, 472 (11.5%) of the seal dives were still deeper than the new high-resolution bathymetry. However, 411 of these dives did match a multi-beam value within a circle of radius 1.25 km around the estimated location of the dive, leaving only 61 of the 4089 (1.5%) dives within the multi-beam survey with a mismatch. This mismatch decreased to only 0.5% if a circle of radius 2.5 km was used. This confirms that: (i) any mismatches between the observed dive depth and the multi-beam data were due to uncertainty in the estimated seal dive location and, (ii) that aggregating the data grids with a size of 2.5 × 2.5 km is an appropriate spatial resolution for subsequent analyses of data from these types of tags. This spatial resolution is similar to that identified by Padman et al.27 in their study (they used 2 km radius) using seal dive data to redefine bathymetry on the West Antarctic Peninsula (WAP). Using tags that provide more accurate location estimates (such as GPS rather than ARGOS, where GPS provides <0.01 km accuracy for the location of the seals on the surface) would enable more highly resolved bathymetry data in the future.
A more detailed examination of the dive profiles for four seals that traversed the deep canyon is plotted as a continuous time-series in relation to the IBCSO V2 grid bathymetry and the new multi-beam bathymetry is presented in (Fig. 2a–d and Supplementary Fig. 1). The seals regularly dived deeper than the IBCSO V2 bathymetry when over the canyon, but not to the ‘true’ bottom in its deepest parts. Like Padman et al.27 and Sutherland et al.28, we found that seal dives can provide a useful source of bathymetric data, but not in very deep water. Even in waters where the seafloor is within reach of diving seals, not all dives will be to the seafloor due to variability across individual seal foraging behaviour36,37 and other extrinsic influences, such as time of day and prey type and distribution30. Seal dive depths collected in this way should therefore be regarded as minimum bathymetric depths rather than confirmed seafloor observations. Seal dive information can nonetheless provide new bathymetric values when compared to existing bathymetric grids at the same location (given caveats of data uncertainties and spatial averaging).
Our analyses therefore focus on this new information by identifying where seals have dived deeper than current estimates of the seafloor to provide new minimum depths at those points. The use of seal dive data as a bathymetric tool would be improved if truly benthic dives could be identified within the data set, but this is difficult to do with the summarised data transmitted by the SMRU CTD-SRDL tags. Padman et al.27 used seal dives that occurred over ship tracks to estimate that 30% of dives were benthic and then used this comparison to provisionally identify benthic diving across their entire WAP seal dive dataset. We did not use this approach because other studies35 have identified large differences between species and among individual seals in terms of the proportion of benthic dives38. Machine learning approaches have been used to identify benthic dives made by elephant seals on the Kerguelen Plateau38, but the technique, while promising, had a 20% misclassification when cross validated. Better bathymetric data could be collected by diving animals using GPS locations (accurate to ~0.01 km on the surface) and having high temporal resolution dive data that will enable better identification of benthic dives38.
Seal dive depth and bathymetry discrepancies in East Antarctica
Dive data from 265 individual seals (50 Weddell seals and 215 southern elephant seals, Table 1), provided a total of 557,874 dives on the East Antarctic continental shelf between 20°E and 160°E. On average, 25% of all the seal dives on the continental shelf (defined here as water shallower than the 2500 m isobath in the IBCSO V2 bathymetry grid) were deeper than the reported depths at the same location. A greater proportion of Weddell seal dives (35%) exceeded the reported bathymetry than Southern elephant seal dives (23%), a reflection of their tendency to do more benthic foraging35,37. To account for the fact that not all seal dives will reach the seafloor, even in relatively shallow waters where only one in eight seal dives may be to the seafloor27, we aggregated multiple dives into 10 × 10 km cells (see methods) and took the most positive discrepancy value in each cell (where a positive value indicates that a seal dive is deeper than the existing bathymetry). Areas in which dives consistently exceed the interpolated depth of the seafloor from IBCSO V2 grid values, are therefore relatively easy to locate and indicate new minimum bathymetric depths.
Of 9787 10 × 10 km cells on the shelf that contained seal dives, 3854 (or ~39%) cells were more than 25 m deeper than the IBCSO V2 bathymetry grid with a mean difference of 224 m. The greatest discrepancies between the seal depth and the gridded bathymetry product tended to be along the coastal margins (Fig. 3). These discrepancies can be substantial, with some values being more than 1000 m below the interpolated IBCSO V2 bathymetry grid (Table 2).

The discrepancy is calculated as the seal dive depth minus the IBCSO V2, so that positive values (shown in red) indicate that a seal dive was deeper than the reported bathymetry. Red therefore indicates where the seal dives were deeper than the reported bathymetry at that point, and blue indicates where seal dives were shallower than the bathymetry. The value in each cell is the maximum discrepancy observed among all the seal dives made within that cell. Four areas of particular interest are indicated by black boxes. Data are shown up to the 2500 m IBCSO V2 bathymetric contour.
We focused on four regions that were well-sampled by the seals, increasing the resolution of the spatial mapping of the seal data to 2.5 km × 2.5 km cells (Table 2, Fig. 4). In the western Prydz Bay region, 42% of the cells had dives deeper than the interpolated IBCSO V2 gridded bathymetry with a mean difference of 108 m. In particular, the dives indicated that there is relatively deep water in front of the Amery Ice Shelf, that the Burton Basin to the west of Fram Bank extends further west than previously known, and that the trough intruding from the shelf edge at 68° E is deeper than previously recorded (Fig. 4a). Further, 57% of the 2.5 × 2.5 km cells contained seal dives that were still deeper than in a more recent regional bathymetry product39. The major source of ocean heat in Prydz Bay is the intrusion of mCDW, which can cause basal melt under the Amery Ice Shelf cavity at intermediate depths40,41,42. Prydz Bay provides an important secondary source of Dense Shelf Water (DSW) to the Cape Darnley AABW, which is already directly suppressed from its full potential by the large volume of Ice Shelf Water (ISW) from the Amery Ice Shelf. If mCDW intrusions access deeper channels into the cavity and cause enhanced basal melt, the increased input of freshwater might threaten the polynya activity downstream and hinder local DSW production33,43,44,45.

The differences between seal dive depths and the IBCSO V2 bathymetry grid illustrated from four well sampled regions along the East Antarctic Coast: a the Western Prydz Bay region; b the West Ice Shelf region; c the Shackleton Ice Shelf Region and; d Vincennes Bay. The discrepancy data are summarised in 2.5 × 2.5 km cells. The discrepancy is calculated as the seal dive depth minus the IBCSO V2 value, so that positive values indicate that a seal dive was deeper than the reported bathymetry. Red therefore indicates where the seal dives were deeper than the reported bathymetry at that point, and blue indicates where the dives were shallower than the bathymetry. The value in each cell is the maximum discrepancy observed among all the seal dives made within that cell. The contour lines represent the IBCSO V2 bathymetry interval in 200 m increments. The transparent yellow lines indicate the ship routes used to generate the IBCSO V2 bathymetric gridded values.
Around the West Ice Shelf, 60% of cells contained dives deeper than the IBCSO V2 bathymetry grid (Table 2, Fig. 4b), with a mean depth discrepancy of 99 m. The seal data indicates the presence of a trough extending westwards from the West Ice Shelf that is deeper than previously thought, as were the waters in front of the Sørsdal Glacier46 and offshore from the Larsmann Hills. Identifying and characterising such troughs provides valuable new information on potential routes for warm mCDW to access its ice shelf cavities. Indeed, it has been noted that the West Ice Shelf produces a great amount of ISW which alters local oceanographic processes, which suppress the formation of the Barrier Bay polynya. This would be difficult to explain without a source of warm water, such as Antarctic Surface Water or mCDW42.
There were fewer seal dives near the Shackleton Ice Shelf (Fig. 4c), and a paucity of data in the eastern region which is covered by extensive fast ice. Despite this, the seal dive data still indicated that 31% of the 2.5 km × 2.5 km cells in this region were on average 126 m deeper than indicated by the IBCSO V2 gridded product. Notable new features include a trough of relatively deep water extending from the shelf edge to the north-western edge of the ice shelf and a region of relatively deep water at the southwestern edge of the ice shelf. The Shackleton Ice Shelf is estimated to produce 72.6 ± 15 Gt yr−1 of basal meltwater, which is the highest among all East Antarctic ice shelves7,24,47. The melt water is thought to be caused primarily by warm water inflow and increased access into the sub-ice shelf cavity through depressions along the eastern ice front of the Totten Glacier48. The seal dive data confirms that deep troughs may connect the Shackleton Ice Shelf cavity to the outer shelf, providing a pathway for warm mCDW intrusions. This highlights the importance of accurately representing water depth along the Antarctic Shelf in the ocean-ice shelf models projecting long-term changes in the Antarctic Ice Sheet1,49.
Only 22% of the continental shelf contained seal dives deeper than the IBCSO V2 bathymetry grid in the Vincennes Bay region (Table 2, Fig. 4d). These dives were on average 154 m deeper than in IBCSO V2. However, several areas of previously uncharted very deep water close to the coast were detected. One of these areas, in front of the Vanderford Glacier, has since been surveyed and the presence of a deep canyon confirmed (see above). This region of deep water extends southwards along the coast to the Adams Glacier33 with another region of very deep water to the west of the Underwood Glacier. Warm mCDW intrusions have been reported to reach the area at −0.5 °C, causing enhanced basal melt, which affects DSW formation33. Given the documented mass loss of the Vanderford Glacier in Vincennes Bay (a cumulative mass loss of 49 Gt from 1979 to 20178,9,10,11,12,13) and the close relationship between mCDW intrusions and troughs on the seafloor8,9,10,11,12,13, it is likely that seafloor topography can influence the stability of the Vanderford Glacier.
Towards integrated bathymetric mapping
Building on this analysis, we used the cells where the seals dived deeper than the IBCSO V2 bathymetry to generate a new integrated bathymetry for each of the four regions. First, we identified which 2.5 km × 2.5 km cells had seal dives that were deeper than the IBCSO V2 bathymetry interpolated grid. This provided new information on the minimum depth of the ocean in those cells. We then replaced the corresponding cell in the IBCSO V2 bathymetry grid with this new minimum depth to produce a new “hybrid bathymetry” (Fig. 5). Note that because we don’t have an independent way to assess if a seal dive is truly to the seafloor, the new depth values can only be regarded as minimum depths. Inclusion of the seal data into the IBCSO V2 gridded maps provided increased bathymetric detail, even at the relatively coarse 2.5 km × 2.5 km resolution (Supplementary Fig. 4). A future improvement would be to integrate the seal data with other sources of information (such as iceberg groundings, multi-beam surveys and satellite observations - see https://albatross.noveltis.fr) to derive new bathymetric maps50.

Panels a–d show all 2.5 x 2.5 km cells in a the Western Prydz Bay region; b the West Ice Shelf region; c the Shackleton Ice Shelf Region and; d Vincennes Bay in which at least one dive was deeper than the IBCSO V2 bathymetry grid at that point, thereby proving a new minimum depth value for the seafloor. Panels e–h illustrate a new “hybrid bathymetry” in e the Western Prydz Bay region; f the West Ice Shelf region; g the Shackleton Ice Shelf Region and; h Vincennes Bay where the values in the IBCSO V2 bathymetry grid are replaced by the new minimum depth values provided by the seals’ dives. Note that for illustrative purposes, the depths are capped at 1000 m. Contours are in 400 m intervals.
As with past efforts6, our ability to map the seafloor will rely on collaboration across disciplines and the integration of complementary technologies, including the estimates of measurement error from all sources6,25,51. Such descriptions and improvements of the coastal ocean bathymetry will provide a better understanding of geological, biological, and climatic processes52. This includes: (i) resolving ocean-ice shelf interactions, (ii) accurately estimating and/or modelling basal melt rates, (iii) quantifying glacier and ice shelf stability, (iv) polar ice sheet mass flux and, (v) their contribution to sea level rise5. Improving bathymetric products will directly affect how well ocean-ice shelf interactions can be resolved and how accurately basal-melt rates can be estimated or modelled. It has been said that the rate at which the seafloor is being mapped “remains unsatisfactorily low”5. Animal dive data can help fill observational gaps near polar regions where access by ships is limited3,27,53. This improved bathymetry could be achieved in several ways. The locations of mismatch between seal dives and existing bathymetric products might indicate areas to be targeted for multi-beam survey campaigns. Also, seal dive depth data should be incorporated into future syntheses of multiple sources of Southern Ocean bathymetric data, where the uncertainty of the seal location estimates and depths relative to the true seafloor can be accounted for by down-weighting them relative to higher precision observations, such as multi-beam surveys6. The final product would be a grid of bathymetry values and their corresponding uncertainties, using all available data sources appropriately weighted and merged.
Methods
Analytical overview
The transmitted data from Satellite Relay Data Loggers (SRDLs) cannot be used reliably to determine when the animal is on the seafloor. However, the seal dive depths can still provide new information when compared to existing bathymetric data at the same location. Our analyses therefore focus on this new information by identifying where seals have dived deeper than current estimates of the seafloor to provide new minimum depths of the ocean at those points. Because the seals rarely dive deeper than 1000 m (only 0.4% of dives in this study exceed that depth), the approach cannot map bathymetry for very deep features.
Estimates of surface locations of seal dives are provided by system ARGOS and have varying levels of uncertainty associated with them, due to factors such as the number and quality of uplinks from the tag to the satellite32,54. Empirical comparisons for diving animals, such as seals, indicate that the ARGOS location estimates have a median error of 3.2 km (95th percentile = 12.1 km), relative to near-simultaneous GPS locations for the same seals31,55. We therefore used selected grid cell sizes to aggregate the dive data, using only the deepest dive that occurred in each cell. Summarising the data in this way minimises the effects of known influences on dive behaviour, such as time of day, sex of the seal and species. Our approach works best when large numbers of dives are available, ensuring multiple dives per cell. While greater numbers of dives provide an increased likelihood of a benthic dive, as found previously by Padman et al.27 (i.e., a dive to the seafloor), even a single dive may still be useful, because if that dive is deeper than existing bathymetry, it provides a new estimate of minimum depth in that cell. We initially used a 10 km × 10 km grid size for the broad scale illustration (Fig. 3) to: (i) increase spatial coverage and (ii) increase the number of dives within a cell from which to infer a new minimum depth. At the finer regional scale (Fig. 4), we were able to use a 2.5 km × 2.5 km grid size because of the higher density of seal dive data in these regions (see above). Nonetheless, this approach still provides useful new bathymetry information in otherwise poorly sampled regions.
Bathymetry data
We used the International Bathymetric Chart of the Southern Ocean IBCSO V2 bathymetric gridded product as our reference bathymetric data set6. IBCSO V2 provides gridded interpolated depths at 500 m × 500 m grid spacing south of 50° S and is a compilation of all available bathymetric data across 77 million km2 of seafloor. It includes multi-beam and single-beam echo soundings, digitized depths from nautical charts, regional bathymetric gridded compilations of observational data, and predicted bathymetry from satellite altimetry. The IBCSO V2 bathymetry grid uses a weighted median of all observations within a cell, which can introduce errors if the cell spans a region with diverse depths (i.e., a steep slope or trough)6. The sparsity of observations in the Southern Ocean also means that most gridded values in this region are based on interpolations rather than actual observations, highlighting the importance of additional seal data, which has a much greater spatial coverage in some areas (Supplementary Fig. 2).
Estimation of dive location
Seals have been equipped with SRDLs in East Antarctica since 2004 as part of the international collaboration Marine Mammals Observing the Oceans Pole to Pole (MEOP)56, the Integrated Marine Observing System (IMOS) animal tracking program, and more recently, as part of the Global Ocean Observing System (GOOS) Animal Borne Ocean Sensor(AniBOS) network30. We used SRDLs to collect dive depth data from two deep diving seal species that use the Antarctic continental shelf: southern elephant seals (Mirounga leonina) and Weddell seals (Leptonychotes weddellii), both of which are known to forage benthically35,37. We deployed a total of 265 CTD-SRDLs on (i) southern elephant seals (n = 215) and (ii) Weddell seals (n = 50) at four sites: Iles Kerguelen (49.3948°S, 69.3545°E), Davis Station, Antarctica (68.5762°S, 77.9696°E), Casey Station Antarctica (66.2821°S, 110.5285°E) and Dumont d’Urville, Antarctica (66.6630°S, 140.0019°E). Seals were captured prior to their post-moult migration, sedated57, weighed and measured58, and equipped with a SRDL on their heads59,60.
The uncertainty of ARGOS locations is not influenced by dive depth or duration. Rather, the initial quality of the location is dependent on the time the seals spend on the surface after a dive. Given that surface intervals increase with dive duration (to enable the seal to replenish its depleted oxygen stores)61, it is possible that location estimates after a long dive are more accurate than after short dives. The SRDLs provided a mean and standard deviation of 16.3 ± 9.3 ARGOS locations and 27.5 ± 14.1 summarised dive profiles per day. We used a random walk, state-space model (R package foieGras31 and now available as aniMotum32) to smooth and filter the location estimates. The model was then used to provide a location estimate for each dive based on its end time. There may also be some discrepancy between the location estimation at the surface location and the location of the deepest point of that seal dive due to lateral moment during the dive. However, this is likely to be <1 km, because a typical seal transit time from the bottom of the dive to the surface is in the order of 10 min and the seals swim at an average speed of 1.6 m s−1 62.
Dive data
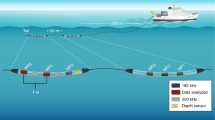
The SRDLs record depth (with a vertical resolution of 1 dbar) whenever the seals are in the water at a frequency of 1 record every 4 s30. Depth values are positive relative to the sea surface. Such high temporal resolution dive data can be used to infer a range of seal behaviours (e.g., resting, mid-water foraging and benthic foraging35). However, in order for the data to be transmitted in real time, the dive data are compressed into six-point broken-stick summaries of individual dive profiles, a subset of which are randomly chosen from a circular buffer for transmission via system ARGOS63. Further the depth data are summarised in a series of bins whose resolution varies with depth. The depth resolution of the bins varies slightly among different tag models but is typically: 2.5 m for depths between 2.5–35 m; 5.0 m for depths between 40–230 m; 10.0 m for depth between 240–400 m; 25.0 m for depths between 420–1500 m, and; 50.0 m for depths between 1550 m–2150 m. Examples of how the high-resolution dive data are summarised for transmission are presented in Fig. 6.

a Dive number 63 and b dive 83 from seal ct157-c215-20. Black lines indicate depth data with 1 dBar resolution collected every 4 s. The green line is the 4-point broken stick summary of the middle dive in the series. The discrepancy in the maximum depth between the sampled and transmitted data is due to the binning of the data in the summarised profiles.
The dive data underwent an initial quality control to remove anomalously deep dives. This was done by calculating a lower edge for the dive duration versus dive depth scatter plot (using a quantile regression set at 0.05, i.e. 5%)38. Dives that fell below this edge were deemed to be too deep for that duration (thereby requiring unrealistic rates of travel by the seal) and were flagged for removal. We provide a summary of the maximum dive depths for transmitted dives used in this study in Supplementary Figure 3.
Processing of bathymetry and seal dive data
The selected study area was 63° S – 82° S and 20° E – 160° E, a region with the majority of dive data on the East Antarctic continental shelf (Fig. 3), collected from March 2004 until November 2021. The IBCSO V2 bathymetric product values were extracted at the location of each dive and used to calculate the difference of the dive depth from the bathymetric bottom, whereby a positive number indicates that the seal dive was deeper than the bathymetry. This value was used to indicate where the seals could provide new information on the depth of the seafloor, where the ocean must be deeper than current knowledge suggests.
Evaluation of seal dives as a measure of seafloor depth
We took advantage of a recent bathymetric survey in an area for which there is also a considerable amount of seal dive data, the Vanderford Glacier region in Vincennes Bay33. Previous analysis suggested that the seals in this area were diving considerably deeper than the existing Bedmap 2.0 gridded product that was used in that study33. To determine whether the seals had identified a new trench we compared the seal dive depths with a high-resolution multi-beam sonar (50 m resolution) bathymetry dataset that was collected on the RSV Nuyina during Voyage 2 in 2021-22. The multi-beam survey used a combination of a drop keel mounted Kongsberg EM712 (for the shallower areas) and a hull mounted Kongsberg EM122 (for the deeper parts). The EM712 had an operating frequency range of 40 to 100 kHz with a wide swath coverage up to 140°. The EM712 was capable of imaging the seafloor where it is within range from about 3 to 3100 m below the transducer, over a swath width up to 5.5 times the water depth. The EM122 was a low frequency multi-beam echo sounder, operating at 12 kHz, with wide swath coverage, up to 150°. It is designed for regional scale seafloor mapping from 50 m to full ocean depth, with swath widths up to 6 times the water depth.
This new multi-beam survey from Vincennes Bay, and a similar recent survey in the high Antarctic Ocean near Cape Darnley39 are yet to be included in any of the gridded bathymetry products, and provide a unique opportunity to compare the seal dive data with both IBCSO V2 gridded product and the “true” bathymetry. A high-resolution bathymetric value was extracted at the location of each seal dive within the surveyed area and the distance from the dive depth to the “true” bathymetric bottom was calculated.
Data availability
The seal dive data and interpolated IBCSO V2 bathymetry data at the same location are available at: Australian Antarctic Data Centre, doi:10.26179/s37r-xs3364.
References
Cochran, J. R., Tinto, K. J. & Bell, R. E. Detailed Bathymetry of the Continental Shelf Beneath the Getz Ice Shelf, West Antarctica. J. Geophys. Res.-Earth Surf. 125, e2019JF005493 (2020).
Jakobsson, M. & Mayer, L. A. Polar Region Bathymetry: Critical Knowledge for the Prediction of Global Sea Level Rise. Front. Mar. Sci. 8. https://doi.org/10.3389/fmars.2021.788724 (2022).
Schaffer, J. et al. Bathymetry constrains ocean heat supply to Greenland’s largest glacier tongue. Nature Geosci. 13, 227–231 (2020).
Wolfl, A. C. et al. Seafloor Mapping—The Challenge of a Truly Global Ocean Bathymetry. Front. Mar. Sci. 6, e283 (2019).
Tozer, B. et al. Global Bathymetry and Topography at 15 Arc Sec: SRTM15+. Earth Space Sci. 6, 1847–1864 (2019).
Dorschel, B. et al. The International Bathymetric Chart of the Southern Ocean Version 2. Sci. Data. 9, 275 (2022).
Rignot, E. et al. Four decades of Antarctic Ice Sheet mass balance from 1979-2017. Proc. Natl Acad. Sci. USA 116, 1095–1103 (2019).
Dinniman, M. S., Klinck, J. M., Hofmann, E. E. & Smith, W. O. Effects of Projected Changes in Wind, Atmospheric Temperature, and Freshwater Inflow on the Ross Sea. J. Clim. 31, 1619–1635 (2018).
Jacobs, S. S., Jenkins, A., Giulivi, C. F. & Dutrieux, P. Stronger ocean circulation and increased melting under Pine Island Glacier ice shelf. Nat. Geosci. 4, 519–523 (2011).
Jacobs, S. et al. The Amundsen Sea and the Antarctic Ice Sheet. Oceanography. 25, 154–163 (2012).
Jenkins, A. et al. Decadal Ocean Forcing and Antarctic Ice Sheet Response: Lessons from the Amundsen Sea. Oceanography. 29, 106–117 (2016).
Klinck, J. M. Circulation near submarine canyons: A modeling study. J. Geophys. Res. Oceans. 101, 1211–1223 (1996).
Klinck, J. M. & Dinniman, M. S. Exchange across the shelf break at high southern latitudes. Ocean Sci. 6, 513–524 (2010).
Silvano, A. et al. Freshening by glacial meltwater enhances melting of ice shelves and reduces formation of Antarctic Bottom Water. Sci. Adv. 4, eaap9467 (2018).
Huguenin, M. F., Holmes, R. M. & England, M. H. Drivers and distribution of global ocean heat uptake over the last half century. Nat. Commun. 13, 4921 (2022).
Li, Q., England, M. H., Hogg, A. M., Rintoul, S. R. & Morrison, A. K. Abyssal ocean overturning slowdown and warming driven by Antarctic meltwater. Nature. 615, 841–8847 (2023).
Fretwell, P. et al. Bedmap2: improved ice bed, surface and thickness datasets for Antarctica. Cryosphere. 7, 375–393 (2013).
Velicogna, I., Sutterley, T. C. & van den Broeke, M. R. Regional acceleration in ice mass loss from Greenland and Antarctica using GRACE time-variable gravity data. Geophys. Res. Lett. 41, 8130–8137 (2014).
Wang, W., Shen, Y., Chen, Q. & Chen, T. One-degree resolution mascon solution over Antarctic derived from GRACE Level-2 data. Front. Earth Sci. 11. https://doi.org/10.3389/feart.2023.1129628 (2023).
Imbie Team. Mass balance of the Antarctic Ice Sheet from 1992 to 2017. Nature. 558, 219–222 (2018).
Dinniman, M. S., St‐Laurent, P., Arrigo, K. R., Hofmann, E. E. & van Dijken, G. L. Analysis of Iron Sources in Antarctic Continental Shelf Waters. J. Geophys. Res. Oceans. 125. https://doi.org/10.1029/2019jc015736 (2020).
Herraiz-Borreguero, L. & Naveira Garabato, A. C. Poleward shift of Circumpolar Deep Water threatens the East Antarctic Ice Sheet. Nat. Clim. Chang. 12, 728–734 (2022).
Pritchard, H. D. et al. Antarctic ice-sheet loss driven by basal melting of ice shelves. Nature. 484, 502–505 (2012).
Rignot, E., Jacobs, S., Mouginot, J. & Scheuchl, B. Ice-shelf melting around Antarctica. Science. 341, 266–270 (2013).
Mayer, L. et al. The Nippon Foundation—GEBCO Seabed 2030 Project: The Quest to See the World’s Oceans Completely Mapped by 2030. Geosciences. 8. https://doi.org/10.3390/geosciences8020063 (2018).
Sandwell, D. T. et al. Improved Bathymetric Prediction Using Geological Information: SYNBATH. Earth Space Sci. 9. https://doi.org/10.1029/2021EA002069 (2022).
Padman, L. et al. Seals map bathymetry of the Antarctic continental shelf. Geophys. Research Letters. 37 https://doi.org/10.1029/2010gl044921 (2010).
Sutherland, D. A. et al. Atlantic water variability on the SE Greenland continental shelf and its relationship to SST and bathymetry. J. Geophys. Res. Oceans. 118, 847–855 (2013).
Harcourt, R. et al. Animal-Borne Telemetry: An Integral Component of the Ocean Observing Toolkit. Front. Mar. Sci. 6. https://doi.org/10.3389/fmars.2019.00326 (2019).
McMahon, C. R. et al. Animal Borne Ocean Sensors – AniBOS – an essential component of the Global Ocean Observing System (GOOS) Front. Mar. Sci. 8 https://doi.org/10.3389/fmars.2021.751840 (2021).
Jonsen, I. D. et al. A continuous-time state-space model for rapid quality control of argos locations from animal-borne tags. Move. Ecol. 8, 31 (2020).
Jonsen, I. D. et al. aniMotum, an R package for animal movement data: Rapid quality control, behavioural estimation and simulation. Method. Ecol. Evol. https://doi.org/10.1111/2041-210x.14060 (2023).
Ribeiro, N. et al. Warm Modified Circumpolar Deep Water Intrusions Drive Ice Shelf Melt and Inhibit Dense Shelf Water Formation in Vincennes Bay, East Antarctica. J. Geophys. Res. Oceans. 126. https://doi.org/10.1029/2020jc016998 (2021).
Hindell, M. A. et al. Circumpolar habitat use in the southern elephant seal: implications for foraging success and population trajectories. Ecosphere. 7, e01213 (2016).
Hindell, M. A. et al. Inter- and intra-sex habitat partitioning in the highly dimorphic southern elephant seal. Ecol. Evol. https://doi.org/10.1002/ece1003.7147 (2021).
Allegue, H. et al. Sex, body size, and boldness shape the seasonal foraging habitat selection in southern elephant seals. Ecol. Evol. 12, e8457 (2022).
Harcourt, R. et al. Regional Variation in Winter Foraging Strategies by Weddell Seals in Eastern Antarctica and the Ross Sea. Front. Mar. Sci. 8. https://doi.org/10.3389/fmars.2021.720335 (2021).
Hindell, M. A. et al. Assessing the potential for resource competition between the Kerguelen Plateau fisheries and southern elephant seals. Front. Mar. Sci. 9 https://doi.org/10.3389/fmars.2022.1006120 (2022).
Smith, J., Nogi, Y., Spinoccia, M., Dorschel, B. & Leventer, A. A bathymetric compilation of the Cape Darnley region, East Antarctica. Antarct. Sci. 33, 548–559 (2021).
Herraiz-Borreguero, L. et al. Circulation of modified Circumpolar Deep Water and basal melt beneath the Amery Ice Shelf, East Antarctica. J. Geophys. Res. Oceans. 120, 3098–3112 (2015).
Herraiz-Borreguero, L. et al. Basal melt, seasonal water mass transformation, ocean current variability, and deep convection processes along the Amery Ice Shelf calving front, East Antarctica. J. Geophys. Res.-Oceans. 121, 4946–4965 (2016).
Aoki, S. et al. Warm surface waters increase Antarctic ice shelf melt and delay dense water formation. Commun. Earth Environ. 3 https://doi.org/10.1038/s43247-022-00456-z (2022).
Kusahara, K., Williams, G. D., Tamura, T., Massom, R. & Hasumi, H. Dense shelf water spreading from Antarctic coastal polynyas to the deep Southern Ocean: A regional circumpolar model study. J. Geophys. Res. Oceans. https://doi.org/10.1002/2017JC012911 (2017).
Narayanan, A., Gille, S. T., Mazloff, M. R. & Murali, K. Water Mass Characteristics of the Antarctic Margins and the Production and Seasonality of Dense Shelf Water. J. Geophys. Res. Oceans. 124, 9277–9294 (2019).
Portela, E. et al. Controls on Dense Shelf Water formation in four East Antarctic polynyas. J. Geophys. Res. Oceans. https://doi.org/10.1029/2022jc018804 (2022).
Gwyther, D. E. et al. Cold Ocean Cavity and Weak Basal Melting of the Sorsdal Ice Shelf Revealed by Surveys Using Autonomous Platforms. J. Geophys. Res.-Oceans. 125, e2019JC015882 (2020).
Adusumilli, S., Fricker, H. A., Medley, B., Padman, L. & Siegfried, M. R. Interannual variations in meltwater input to the Southern Ocean from Antarctic ice shelves. Nat. Geosci. 13, 616–620 (2020).
Pelle, T., Morlighem, M., Nakayama, Y. & Seroussi, H. Widespread Grounding Line Retreat of Totten Glacier, East Antarctica, Over the 21st Century. Geophys. Res. Lett. 48 https://doi.org/10.1029/2021gl093213 (2021).
Morlighem, M. et al. Deep glacial troughs and stabilizing ridges unveiled beneath the margins of the Antarctic ice sheet. Nat. Geosci. 13, 132–137 (2019).
Luckman, A., Padman, L. & Jansen, D. Persistent iceberg groundings in the western Weddell Sea, Antarctica. Remote Sens. Environ. 114, 385–391 (2010).
Mayer, L. A. Frontiers in Seafloor Mapping and Visualization. Mar. Geophys. Res. 27, 7–17 (2006).
Bamber, J. L., Oppenheimer, M., Kopp, R. E., Aspinall, W. P. & Cooke, R. M. Ice sheet contributions to future sea-level rise from structured expert judgment. Proc. Natl Acad. Sci. 116, 11195–11200 (2019).
Sun, C. et al. On the influences of the continental shelf bathymetry correction in Prydz Bay, East Antarctica. Front. Mar. Sci. 9 https://doi.org/10.3389/fmars.2022.957414 (2022).
Argos. Argos User’s Manual: Worldwide Tracking and Environmental Monitoring by Satellite. Toulouse: Argos. (2016).
Lowther, A. D., Lydersen, C., Fedak, M. A., Lovell, P. & Kovacs, K. M. The Argos-CLS Kalman Filter: Error Structures and State-Space Modelling Relative to Fastloc GPS Data. PLoS One. 10 https://doi.org/10.1371/journal.pone.0124754 (2015)
Roquet, F. et al. A Southern Indian Ocean database of hydrographic profiles obtained with instrumented elephant seals. Sci. Data. 1, 140028 (2014).
McMahon, C. R., Burton, H. R., McLean, S., Slip, D. & Bester, M. N. Field immobilisation of southern elephant seals with intravenous tiletamine and zolazepam. Vet. Rec. 146, 251–254 (2000).
Field, I. C., Bradshaw, C. J. A., McMahon, C. R., Harrington, J. & Burton, H. R. Effects of age, size and condition of elephant seals (Mirounga leonina) on their intravenous anaesthesia with tiletamine and zolazepam. Vet. Rec. 151, 235–240 (2002).
Field, I. C. et al. Refining instrument attachment on phocid seals. Mar. Mamm. Sci. 28, E325–E332 (2012).
McMahon, C. R., Field, I. C., Bradshaw, C. J. A., White, G. C. & Hindell, M. A. Tracking and data-logging devices attached to elephant seals do not affect individual mass gain or survival. J. Exp. Mar. BioL. Ecol. 360, 71–77 (2008).
Hindell, M. A., Slip, D. J. & Burton, H. R. The diving behaviour of adult male and female southern elephant seals, Mirounga leonina (Pinnipedia, Phocidae). Aust. J. Zool. 39, 595–619 (1991).
Hindell, M. A. et al. Environmental and physiological determinants of successful foraging by naive southern elephant seal pups during their first trip to sea. Can. J. Zool.-Revue Canadienne De Zoologie 77, 1807–1821 (1999).
Fedak, M. A., Lovell, P. & Grant, S. M. Two approaches to compressing and interpreting time-depth information as collected by time-depth recorders and satellite-linked data recorders. Mar. Mamm. Sci. 17, 94–110 (2001).
Hindell, M. A. & McMahon, C. R. (Australian Antarctic Data Centre, Southern Ocean pinnipeds provide bathymetric insights on the East Antarctic continental shelf https://doi.org/10.26179/s37r-xs33 2023).
Acknowledgements
We thank the Technology & Innovation Branch of the Australian Antarctic Division for the collection and provision of the Vanderford Glacier multi-beam echo sounder survey data. The fieldwork to deploy the instruments on seals was financially and logistically supported by the Institut Paul Emile Victor (IPEV, France) under the Système National d’Observation-Mammifères Echantillonneurs du Milieu Océanique (SNO-MEMO) with the support of the Antarctic research program 109 (H. Weimerskirch), 1201 (C. Gilbert & C. Guinet) and 1182 (J.B. Charrassin) in collaboration with the Integrated Marine Observing System (IMOS, Australia; https://imos.org.au/) and the Program Terre-Océan-Surface Continentale-Atmosphère from the Centre National d’Etudes Spatiales (TOSCA-CNES, France). IMOS is a national collaborative research infrastructure, supported by the Australian Government. It is operated by a consortium of institutions with the University of Tasmania as lead agent. This research contributes to the Australian Research Council (ARC) Discovery Project DP180101667 and the ARC Special Research Initiative SR200100008. All tagging procedures were approved and executed under University of Tasmania Animal Ethics Committee guidelines (A12141, A14523), the Comité d’éthique Anses/ ENVA/UPEC (no. APAFiS: 21375) and by Macquarie University Ethics Committee ARA 2014_057. We would also like to thank and acknowledge Drs Laurie Padman and Michele Rebesco and an anonymous reviewer for their thorough, thoughtful and positive reviews of our paper. Our paper has been improved greatly by their input.
Author information
Authors and Affiliations
Contributions
Field work and leadership: C.R.M., M.A.H., J.B.C., C.G., R.H., S.L. Data collection and curation: C.R.M., M.A.H., J.B.C., C.G., R.H., S.L. Data preparation and analyses: C.R.M., M.A.H., J.B.C., R.C., C.G., R.H., S.L., B.R., M.S., N.R. Data interpretation and paper preparation and review: C.R.M., M.A.H., J.B.C., R.C., C.G., R.H., S.L., B.R., M.S., N.R.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Earth & Environment thanks Laurence Padman, Michele Rebesco and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Primary Handling Editor: Clare Davis.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
McMahon, C.R., Hindell, M.A., Charrassin, J.B. et al. Southern Ocean pinnipeds provide bathymetric insights on the East Antarctic continental shelf. Commun Earth Environ 4, 266 (2023). https://doi.org/10.1038/s43247-023-00928-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s43247-023-00928-w
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
