
Abstract
Liquid droplets hanging from solid surfaces are commonplace, but their physics is complex. Examples include dew or raindrops hanging onto wires or droplets accumulating onto a cover placed over warm food or windshields. In these scenarios, determining the force of detachment is crucial to rationally design technologies. Despite much research, a quantitative theoretical framework for detachment force remains elusive. In response, we interrogated the elemental droplet–surface system via comprehensive laboratory and computational experiments. The results reveal that the Young–Laplace equation can be utilized to accurately predict the droplet detachment force. When challenged against experiments with liquids of varying properties and droplet sizes, detaching from smooth and microtextured surfaces of wetting and non-wetting chemical make-ups, the predictions were in an excellent quantitative agreement. This study advances the current understanding of droplet physics and will contribute to the rational development of technologies.
Similar content being viewed by others
Introduction
Droplet attachment to and detachment from solid surfaces is ubiquitous in nature, e.g., morning dew drops on spider webs1, grass blades2, and the compound eyes of insects3 and sea spray on the exoskeletons of marine skaters4 and desert beetles5. From an industrial perspective, droplet–surface interactions are important in the application of foliar pesticides/nutrients6, separation processes7, heat transfer8, interfacial chemistry9, atmospheric water harvesting1,10, and the cleaning of windowpanes, windshields, and solar cells11. Some of these applications require droplets to stick to a surface (e.g., foliar sprays6,12), while others require their prompt removal (e.g., windshields11). Therefore, it is crucial to understand the mechanisms associated with the droplet detachment force. It has been reported that the magnitudes of normal and lateral droplet detachment forces are dissimilar; for example, sessile droplets of water/oil may slide on a perfluorinated kitchen pan when tilted but may not detach when the pan is held upside down13,14,15. Several experimental measurements have been employed to describe the lateral detachment of droplets, including the advancing (\({\theta }_{{{{{{\rm{A}}}}}}}\)) and receding (\({\theta }_{{{{{{\rm{R}}}}}}}\)) contact angle16, the roll-off angle17,18, and the direct lateral movement of droplets, which are generally compared using the Furmidge relation \({F}_{{{{{{\rm{lat}}}}}}}={D}_{{{{{{\rm{b}}}}}}}\gamma \left(\cos {\theta }_{{{{{{\rm{R}}}}}}}-\cos {\theta }_{{{{{{\rm{A}}}}}}}\right)\), where \({D}_{{{{{{\rm{b}}}}}}}\) and \(\gamma\) are the droplet base diameter and the liquid surface tension, respectively17,19. On the other hand, to quantify the normal detachment force, ring tensiometry has been employed at the millimeter length scale20,21,22, while scanning droplet adhesion microscopy23 and droplet force apparatus techniques24 have more recently been used to produce data at a micrometer resolution with a nanonewton sensitivity. Ferrofluids have also been utilized to measure the droplet detachment force under a magnetic field25,26. Despite this body of research, quantitative insights into the mechanisms associated with droplet detachment are lacking14,15,20,25,27,28,29,30,31,32,33,34,35,36,37. Complications can arise when seeking to interpret experimental data because the detachment force is found to be sensitive to the size and volume of the droplet27,38 and to the liquid residue left behind by the detaching droplet. In the latter case, the detachment initiates at the solid–liquid–vapor interface, where the droplet base diameter shrinks as the droplet elongates and then the droplet breaks up in a manner similar to Tate’s experiment and/or a dripping faucet27,39. Therefore, it is important to account for the contributions of the many subtle factors that influence the droplet detachment force.
The Young–Dupré equation, introduced over 153 years ago, has been utilized to theoretically describe droplet–solid surface adhesion27,39. It estimates the work of adhesion using the formula \({W}_{{{{{{\rm{SL}}}}}}}=\gamma \left(1+\cos {\theta }_{{{{{{\rm{e}}}}}}}\right)\), where \({\theta }_{{{{{{\rm{e}}}}}}}\) is the droplet contact angle at thermodynamic equilibrium27. This approach assumes an idealized scenario in which the liquid droplet completely detaches from the solid surface without any deformation28,40. Some researchers have argued that the \({W}_{{{{{{\rm{SL}}}}}}}\) expression with the receding angle \({\theta }_{{{{{{\rm{R}}}}}}}\) has a significantly higher correlation with the measured detachment force14,20,41. This is also intuitive because the base radius of a droplet starts changing (i.e., decreasing) only after \({\theta }_{{{{{{\rm{R}}}}}}}\) is reached. Therefore, the detachment force \({F}_{{{{{{\rm{D}}}}}}}\) can be expressed following Tate’s law as
where \({R}_{{{{{{\rm{i}}}}}}}\) is the droplet base radius just before \({\theta }_{{{{{{\rm{R}}}}}}}\) is reached. Assuming the droplet has volume \(V\) when it exhibits \({\theta }_{{{{{{\rm{R}}}}}}}\), \({R}_{{{{{{\rm{i}}}}}}}\) can be estimated via spherical cap formula as:
In their pioneering study, Tadmor and co-workers developed the Centrifugal Adhesion Balance (CAB) technique, which allows for the tilt-free rotation of a pendant droplet so that the centrifugal force increases its weight (via the applied “body force”) and records the droplet shape when it detaches30. However, in the CAB approach, it is not entirely clear whether the advancing or receding contact angle should be used to estimate the droplet detachment. Tadmor colleagues also contended that \({R}_{{{{{{\rm{i}}}}}}}\) in Eq. (1) should be replaced by the droplet radius at the moment the critical body force is reached (\({R}_{{{{{{\rm{D}}}}}}}\)), after which the droplet diameter starts shrinking spontaneously before detachment30. Due to the significance of \({\theta }_{{{{{{\rm{R}}}}}}}\) in terms of droplet detachment, we can modify Eq. (1) by replacing \({R}_{{{{{{\rm{i}}}}}}}\) with \({R}_{{{{{{\rm{D}}}}}}}\):
Here, it should be noted that \({R}_{{{{{{\rm{D}}}}}}}\) must be measured experimentally; therefore, Eq. (3) cannot be used to predict the detachment force a priori. Some researchers have empirically modified the Young– Dupré equation to derive a “universal fit” for FD 25. Following a different approach, Butt and co-workers have argued that the detachment force of a droplet sitting on a smooth surface pulled by an actuator (a capillary-bridge-like scenario) is affected by the surface tension and Laplace pressure forces at the moment before detachment as29:
where \(\Delta P=\gamma \left(\frac{1}{{R}_{1}}+\frac{1}{{R}_{2}}\right)\) and \({R}_{1}\) and \({R}_{2}\) are the radii of curvatures at the interface. Equation (4) can be used to calculate the force experienced by the droplet when \({R}_{{{{{{\rm{D}}}}}}}\) and \(\triangle P\) are known. However, because \({R}_{{{{{{\rm{D}}}}}}}\) and \(\Delta P\) need to be measured by analyzing the droplet shape before detachment, Eq. (4) cannot be used to predict \({F}_{{{{{{\rm{D}}}}}}}\). It is worth noting that the capillary-bridge-like approach is primarily used to measure \({F}_{{{{{{\rm{D}}}}}}}\) on superhydrophobic surfaces23,24 since the droplet is likely to be deposited to the surface rather than detached from it when the surface has a stronger wettability. In addition, when the actuator is pulled at a constant speed, \({F}_{{{{{{\rm{D}}}}}}}\) is actually lower than the maximum recorded force20. This means that the measured \({F}_{{{{{{\rm{D}}}}}}}\) value for the same surface can vary depending on whether the actuator is pulled at a constant force or at a constant speed. This artefact does not arise in CAB experiments as they entail increasing the body force to detach the droplet from the surface; also, CAB can be utilized to measure \({F}_{{{{{{\rm{D}}}}}}}\) for a relatively broad range of surface wettability.
Given the proliferation of experimental techniques, competing models, and scientific debate14,15,20,25,27,28,29,30,31,32,33,34,35,36,37, an encompassing theoretical framework for droplet detachment is needed to draw together the expansive body of experimental work. To this end, we combine laboratory experiments, theory, and computation in this paper to answer the following elemental questions:
-
1.
Can detachment force \({F}_{{{{{{\rm{D}}}}}}}\) be experimentally quantified by increasing the weight of a pendant droplet placed on a surface (of wetting or non-wetting nature, and smooth or microtextured topography)?
-
2.
Does \({F}_{{{{{{\rm{D}}}}}}}\) depend only on the work of adhesion (\({W}_{{{{{{\rm{SL}}}}}}}\)) prescribed by Eq. (1), or does it also depend on the stability/curvature of the liquid–vapor interface during detachment?
-
3.
Is it possible to simulate laboratory experiments in silico and develop an encompassing theoretical framework to accurately predict FD?
-
4.
Can the framework also be used to predict \({F}_{{{{{{\rm{D}}}}}}}\) for different scenarios, such as by increasing droplet volume or reducing the interfacial tension (e.g., the oil–water–solid system)?
Our study reveals that the droplet detachment force \({F}_{{{{{{\rm{D}}}}}}}\) is not a function of the work of adhesion as prescribed by the Young–Dupré equation (Eq. 1). Instead, \({F}_{{{{{{\rm{D}}}}}}}\) is related to an instability at the liquid-vapor interface that can be predicted by solving the Young–Laplace equation (YLE). This theoretical framework quantitatively captures the \({F}_{{{{{{\rm{D}}}}}}}\) of pendant droplets for multiple probe liquids detaching from flat or microtextured surfaces with varying chemical make-ups; it also affords encompassing insights into droplet detachment in scenarios where gravity and/or buoyancy are relevant.
Results
Samples and probe liquids
To study \({F}_{{{{{{\rm{D}}}}}}}\), we employed smooth and textured substrates with chemical make-ups ranging from wetting to non-wetting. The substrates included silanized SiO2/Si wafers, flat polystyrene, and microtextured SiO2/Si (Fig. 1). The silanized SiO2/Si samples were prepared by functionalizing SiO2/Si wafers with (3-aminopropy)triethoxysilane, trichloro(octadecyl)silane, 11-bromoudecyltrichlorosilane, 10-undecenyltrichlorosilane, and 10-undecenyltrichlorosilane, following a recently reported method42. The polystyrene samples were obtained commercially and used without any surface modification. For the microtextured surfaces, the photolithography and dry etching of SiO2 and Si layers were utilized to create arrays of cylindrical pillars with a diameter, height, and center-to-center distance of 20 μm, 50 μm, and 25 μm, respectively. After microfabrication, the surface was functionalized with perfluorodecyltrichlorosilane (FDTS) to render it hydrophobic, following a recently reported process43. These chemical and physical treatments were employed to modify the surface wettability to produce a wide range of apparent contact angles for a comprehensive analysis of droplet detachment forces. The microtextured surfaces were designed specifically not to exhibit superhydrophobicity to ensure that the analysis of pendant droplet detachment was possible with our experimental technique (describe below).

Representative samples of varying wettabilities and texture tested in this study. \({\theta }_{{{{{{\rm{A}}}}}}}\) and \({\theta }_{{{{{{\rm{R}}}}}}}\) are respectively the apparent advancing and receding angles. a Silanized Si wafers, b flat polystyrene sheet and (c) microtextured SiO2/Si wafer. The top and bottom panels show the scanning electron micrographs and the measured contact angles of the samples. The insets in panels (a) and (b) present the atomic force micrographs where the color contrasts represent the topographical variation of the surface with the scale bar. In the bottom panels, the diameter of the needle is 0.51 mm.
The samples were stored in glass petri dishes in a N2 flow cabinet and, before their use, they were rinsed with ethanol and water and dried with N2 gas. Water and ethylene glycol were used as the probe liquids. To characterize the wettability of the samples, we measured the apparent advancing (\({\theta }_{{{{{{\rm{A}}}}}}}\)) and receding (\({\theta }_{{{{{{\rm{R}}}}}}}\)) angles of water and ethylene glycol on the samples using a goniometer. The measurement of the apparent contact angles involved placing a drop (2–6 μl) on the surface and then recording the advancing and receding angles with the addition and then removal of 15 μl to the drop at a rate of 0.2 μL/s.
Laboratory experiments on normal droplet detachment
The normal detachment force \({F}_{{{{{{\rm{D}}}}}}}\) was directly measured using the CAB technique. This entails the application of centrifugal force to manipulate the droplet body force (or increase its weight) and detach it. CAB ensures that the droplet does not tilt during normal detachment30, as illustrated in Fig. 2(a). This is because the sum of the lateral forces is zero (\(g\sin \alpha ={\omega }^{2}R\cos \alpha\); see the free-body diagram in the inset of Fig. 2a). As a result, the effective normal acceleration is given by \({g}_{{{{{{\rm{eff}}}}}}}=g/\cos \alpha\), where \(g\) and \(\alpha\) are the gravitational acceleration and the angle between the sample and the horizontal line. The normal force is then given by \({F}_{{{{{{\rm{g}}}}}}}=m{g}_{{{{{{\rm{eff}}}}}}}\), and we expressed it in a non-dimensional form by normalizing it with \(\gamma \root 3 \of {V}\) as follows:
where m, V, and \(\rho\) are the droplet mass, volume, and density, respectively. In a typical CAB experiment, the body force is increased incrementally until detachment occurs. Snapshots of the droplet detachment experiments conducted using the CAB approach are available in Supplementary Movie 1 and Fig. 2(b). The corresponding force is then registered as detachment force \({F}_{{{{{{\rm{D}}}}}}}\), which can be written in a non-dimensional form as follows (see Method):
where \({g}_{{{{{{\rm{c}}}}}}}\) is the critical acceleration. This non-dimensional form was employed in the present study to disentangle the dependence of \({F}_{{{{{{\rm{D}}}}}}}\) on the droplet volume, the surface tension of the probe liquid, the surface wettability, and the microtexture. To this end, we first investigated whether the non-dimensional detachment force was independent of the droplet volume. By varying the water droplet volume from \(V\) ≈ 3–13 μl on substrates of different wettability, we established that for a given \({\theta }_{{{{{{\rm{R}}}}}}}\), \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) is fairly constant (Fig. 2c). We then computationally and experimentally probed \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) as a function of \({\theta }_{{{{{{\rm{R}}}}}}}\), on various of flat/nanotextured surfaces with various liquids.

a Schematic illustration of the CAB system. The inset shows a free-body diagram of a pendant droplet. Zero lateral force is established by ensuring that \(g\sin \alpha ={\omega }^{2}R\cos \alpha\), where \(g\), \(\alpha\), \(\omega\), and \(R\) are respectively the gravitational acceleration, tilting angle, angular velocity, and the length of the rotating arm. b In a typical measurement set-up, the body force of a pendant drop is gradually increased by increasing the effective acceleration \({g}_{{{{{{\rm{eff}}}}}}}\) until it detaches and critical acceleration \({g}_{{{{{{\rm{c}}}}}}}\) (blue dashed line) is recorded. Representative snapshots at various times are presented. c Nondimensional detachment force \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) for different receding angles \({\theta }_{{{{{{\rm{R}}}}}}}\). The data reveal that, in our volumetric range, \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) does not vary significantly. Note: each point is the average of three \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) measurements of a given volume while the error bars represent their standard deviation. The dashed lines indicate the average \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) value for different volumes.
Lattice Boltzmann simulations
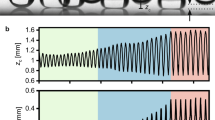
To complement our laboratory investigation of droplet detachment, lattice Boltzmann (LB) simulations were performed. The LB algorithm numerically solves the Navier–Stokes and continuity equations to recover the hydrodynamics of a fluid system44. These simulations enabled us to capture the droplet detachment from smooth and microtextured surfaces over a wide range of apparent contact angles, which would be difficult and laborious to study experimentally. In a typical in silico experiment, \({g}_{{{{{{\rm{eff}}}}}}}\) was increased incrementally in a manner similar to the CAB experiment until the droplet detached. This yielded the critical acceleration \({g}_{{{{{{\rm{c}}}}}}}\), which could be used to calculate \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) via Eq. (6). Figure 3 presents a representative comparison of the laboratory experiments with the LB simulations of a pendant drop detaching from a wetting surface. As \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\) increased and more liquid volume was drawn downward (compare Fig. 3a–d), the droplet shapes obtained from the simulation accurately reflected those from the experiment. Details of the simulation method are provided in the Methods section and in Supplementary Note 1.

Comparison of droplet shapes obtained from the CAB experiment (left) and LB simulation (right) for different value of body force \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\) (a–c). Panels (c) and (d) show the droplet shapes before and after detachment, respectively. The receding angles for both the CAB experiment and LB simulation are similar (\({\theta }_{{{{{{\rm{R}}}}}}}\approx 55^{\circ }\) ).
Quantifying the normal droplet detachment force
With our experimental and computational approach, we were able to test a wide range of surface wettability and microtexture (see Table 1 for a summary). Droplet detachment force \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) was quantified based on the experimental and numerical methods using Eq. (6). The CAB experiments and subsequent image analysis were used to assess changes in the droplet geometry prior to detachment (Supplementary Movie 1). The measured detachment force (\({\tilde{F}}_{{{{{{\rm{D}}}}}}}\)) values were plotted against \({\theta }_{{{{{{\rm{R}}}}}}}\) due to its well-established relevance to droplet adhesion/hysteresis14,20,41 that we have also introduced above. As presented in Fig. 4 in red and orange data plots, \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) was compared with the predicted detachment forces based on (i) the Young–Dupré equation (Eq. 1, the green curve in Fig. 4), and (ii) the modified version following Tadmor’s approach30 (Eq. 3, the blue and purple data points). To fairly compare the droplet detachment forces across the various samples (Table 1) and probe liquids of varying volumes, we normalized the forces (Eqs. 1 and 3) with the factor \(\gamma \root 3 \of{V}\). The results reveal that while the aforementioned theoretical models qualitatively capture the relationship between \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) and \({\theta }_{{{{{{\rm{R}}}}}}}\), they fail to describe it quantitatively.

Measured detachment force \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) calculated using Eq. (6) for different \({\theta }_{{{{{{\rm{R}}}}}}}\) obtained from lattice Boltzmann (LB) simulations ( ) and centrifugal adhesion balance (CAB) experiments (
) and centrifugal adhesion balance (CAB) experiments ( ). The measured values are compared with theoretical predictions using Eq. (1) (plotted as
). The measured values are compared with theoretical predictions using Eq. (1) (plotted as  ), and Eq. (3) (plotted as
), and Eq. (3) (plotted as  and
and  ). Both Eqs. (1) and (3) are normalized using \(\gamma \root 3 \of {V}\) for this plot. The lower and upper limits of the error bars for the simulation data represent cases where the droplet is still attached or detached, respectively. For the experimental data, the error bars represent the standard deviation of the measurement.
). Both Eqs. (1) and (3) are normalized using \(\gamma \root 3 \of {V}\) for this plot. The lower and upper limits of the error bars for the simulation data represent cases where the droplet is still attached or detached, respectively. For the experimental data, the error bars represent the standard deviation of the measurement.
Theoretical approach
The laboratory experiments and computer (LB) simulations were in excellent agreement (Fig. 4), with both indicate that the droplet detachment force cannot be quantitatively described by the classical concept of work of adhesion. This discrepancy presumably arises because the real-world droplet detachment differs considerably from the idealized scenario. In the latter case, droplets with a constant volume (\({V}_{0}\)), an intrinsic contact angle (\({\theta }_{{{{{{\rm{e}}}}}}}\)), and spherical sections with curved (liquid–vapor) and flat (liquid–solid) areas (\({A}_{{{{{{\rm{C}}}}}}}\) and \({A}_{{{{{{\rm{P}}}}}}}\), respectively) obey the geometric relationship \({\left(\frac{{{{d}}}{A}_{{{{{{\rm{C}}}}}}}}{{{{d}}}{A}_{{{{{{\rm{P}}}}}}}}\right)}_{{V}_{0}}=\cos {\theta }_{{{{{{\rm{e}}}}}}}\)28,40,45,46. This is only possible when the apparent contact angle does not change significantly from its value at thermodynamic equilibrium. However, as captured in our experimental images (Figs. 2b and 3), droplets undergo dramatic departures from the equilibrium configuration during detachment. Having demonstrated that \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) cannot be quantitatively captured using the classical theory of work of adhesion and its variations, we present an alternative approach based on the YLE, which relates the pressure difference across a liquid–vapor interface (\(\Delta P\)) due to its radii of curvature (\({R}_{1}\) and \({R}_{2}\)) and surface tension as27
For an axisymmetric system, such as our pendant drop, Eq. (7) can be expressed in Cartesian coordinates as
where \(x\) and \(z\) are the horizontal and vertical axes, respectively. The solution for \(x(z)\) from Eq. (8) yields the droplet shape. In order to solve this non-linear second-order ordinary differential equation (ODE), we follow O’Brien and van den Brule’s approach47 by introducing new variables as a function of the droplet’s contour path \(s\):
where \(\phi\) is the angle that any arbitrary point on the path makes with the vertical axis. Next, we consider the pressure difference inside across the interface \(\Delta P\), which is given by the pressure at the apex and the hydrostatic pressure, meaning that Eq. (9a) can be written as
where \({R}_{0}\) is the radius of curvature at the apex. To associate this with our problem of interest, we normalize the length variables in Eqs. (9) and (10) with the cube root of the droplet volume \(\root 3 \of {V}\), which yields
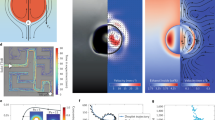
where \({\tilde{F}}_{{{{{{\rm{g}}}}}}}=\frac{\rho {g}_{{{{{{\rm{eff}}}}}}}{V}^{2/3}}{\gamma }\) is the same as the non-dimensional body force introduced in Eq. (5). After choosing the values of \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\) and \({\hat{R}}_{0}\), Eq. (11a–c) can be numerically solved for \(\phi \left(\hat{s}\right)\), \(\hat{z}\left(\hat{s}\right)\), and \(\hat{x}\left(\hat{s}\right)\) using an ODE solver. The details on how Eqs. (11) were solved is provided in Supplementary Note 2. Figure 5(a) presents a typical parametric plot for \(\hat{x}\left(\hat{s}\right)\) and \(\hat{z}\left(\hat{s}\right),\) obtained from the solution for Eq. (11a–c). The droplet shape then can be obtained by considering \({\hat{R}}_{0}\) to be a tunable parameter and solving Eq. (11a–c) for \(\{0\le \hat{s}\le {\hat{s}}_{\max }\}\) with regard to the physical constraints \(\hat{V}={\int }_{0}^{{\hat{s}}_{\max }}\pi {\hat{x}(\hat{s})}^{2}\sin \phi (\hat{s})d\hat{s}=1\) and \(\phi \left({\hat{s}}_{\max }\right)={\theta }_{{\rm{R}}}\). The first constraint is related to the fixed droplet volume, while the second is related to the receding contact angle at the liquid-solid-vapor interface. As shown in Fig. 5(b), the droplet shape reconstructed in this way is identical to that obtained from the LB simulations, which in turn are in correspondence with the experiments (Fig. 3).

a Droplet liquid–vapor interface expressed in \(\hat{x}\)-\(\hat{z}\) coordinates as well as in path \(\hat{s}\) and inclination angle \(\phi\) coordinates. The interface shape is obtained from the parametric plot of \(\hat{z}[\hat{s}]\) against \(\hat{x}[\hat{s}]\) obtained from solving Eqs. (11). b A representative comparison of a pendant droplet contour reconstructed from lattice Boltzmann (LB) simulations and from the solution for Eqs. (11) shows the agreement between the two methods. \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\) and \({\theta }_{{\rm{R}}}\) are the effective body force and the receding angle respectively.
Next, to determine \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) using the YLE approach, we increase \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\) incrementally and determine the corresponding droplet shape by solving Eqs. (11) until the two constraints can no longer be satisfied simultaneously. For this specific \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\) value, the system cannot find a stable configuration, and the droplet becomes unstable and detaches. This is recorded as \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\). This strategy, however, is inefficient because \({\hat{R}}_{0}\) needs to be tuned for each \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\). A more efficient strategy for determining \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) is by normalizing the length variables in Eqs. (9–10) with \({R}_{0}\) so that Eq. (11a) can be written as48
where \(\beta =\frac{\rho {g}_{{{{{{\rm{eff}}}}}}}{{R}_{0}}^{2}}{\gamma }\), while Eqs. (11b) and (11c) are still in the same notation. In this case, the only tunable parameter is \(\beta\) and the only physical constraint to determine the droplet shape is \(\phi \left({\hat{s}}_{\max }\right)={\theta }_{{{{{{\rm{R}}}}}}}\). By choosing \({R}_{0}=1\), \(\beta\) is related to \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\) via \({\tilde{F}}_{{{{{{\rm{g}}}}}}}=\beta {\hat{V}}^{2/3}\). Note: \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) can be determined by finding the highest value of \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\) for different \(\beta\), which indicates the maximum \({\tilde{F}}_{{{{{{\rm{g}}}}}}}\) value for which the droplet is still stable. The results for determining \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) using this strategy are displayed as black data points in Fig. 6, which accurately capture the experimental and simulation results. For practical reasons, the following model,
is fitted into the predicted data points. Equation (13) then can be used to approximate \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) of a given \({\theta }_{{{{{{\rm{R}}}}}}}\) without the need to iteratively solve Eq. (12) numerically (see Supplementary Note 3). Please note that, using the relation given in Eq. (6), calculating the detachment force in Newton is straightforward when the liquid properties (\(\rho\), \(\gamma\), and \(V\)) are known.

Comparison of the direct measurement of the detachment force \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) using centrifugal adhesion balance (CAB) experiments ( ) and lattice Boltzmann (LB) simulations (
) and lattice Boltzmann (LB) simulations ( ) and by solving Eq. (12), presented as (•). The data are also compared with the prediction based on the work of adhesion (Eq. 1), which is presented as (
) and by solving Eq. (12), presented as (•). The data are also compared with the prediction based on the work of adhesion (Eq. 1), which is presented as ( ). The lower and upper limits of the error bars for the simulation data represent cases where the droplet is still attached or detached, respectively. For the experimental data, the error bars represent the standard deviation of the measurement.
). The lower and upper limits of the error bars for the simulation data represent cases where the droplet is still attached or detached, respectively. For the experimental data, the error bars represent the standard deviation of the measurement.
Generality of the YLE-based predictive framework
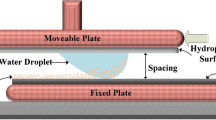
We have demonstrated two approaches to predicting \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) using the YLE with the volume constraint (Eq. 11) and without (Eq. 12). Although both approaches can accurately capture the results from CAB experiments and LB simulations (Fig. 6), the latter approach (Eq. 12) is more relevant to volume-induced detachment since the total droplet volume is not constrained. This begs the following fundamental question – Could there be a critical volume or a critical interfacial tension that may also drive the droplet detachment akin to the gravity-induced detachment?
To answer this, we designed LB simulations where the droplet volume was increased, or the interfacial tension was decreased, until the detachment occurs. Note: the latter case is relevant to displacing an oil droplet underwater by adding a surfactant. The results reveal an equivalence between droplet detachment realized by increasing gravity or increasing volume or decreasing the interfacial tension (Fig. 7). To our knowledge, this is the first time such an equivalence has been established.

a A comparison of the detachment force, \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\), predictions from solving the YLE with and without volume constraint, respectively Eqs. (11) and (12). The theoretical predictions were also compared with lattice Boltzmann (LB) simulations. Three simulation setups were used to determine \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) including via increasing gravity (Fig. 3), b volume addition, and (c) interfacial tension reduction. The lower and upper limits of the error bars represent cases where the droplet is still attached or detached, respectively.
Discussion
This report establishes that the droplet detachment force \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) can be predicted accurately using the YLE. This equation describes stable pendant or sessile droplet shapes under an external force but, to the best of our knowledge, it has not previously been employed to recover \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\)27. Remarkably, when YLE was numerically solved in conjunction with constraints on the receding contact angle, the limit for the droplet stability could be determined; when the external force exceeded this critical value, detachment occurred. The YLE-predicted \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) values were in excellent quantitative agreement with the \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) values experimentally measured from the CAB over a wide range of chemical compositions on smooth and textured surfaces (Table 1) and those from LB simulations. The onset of this instability is an important event whose significance has not been fully recognized in the droplet detachment process, partly because most previous experimental studies have focused on hydrophobic and superhydrophobic surfaces. These surfaces present low (i.e., near-zero) values of \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\), which is often incorrectly linked to \({W}_{{{{{{\rm{SL}}}}}}}\) via Young-Dupre equation where the \(\left(\cos {\theta }_{{{{{{\rm{R}}}}}}}+1\right)\) term approaches zero at high \({\theta }_{{{{{{\rm{R}}}}}}}\). The rich physics of instability-driven droplet detachment becomes apparent on surfaces that present lower \({\theta }_{{{{{{\rm{R}}}}}}}\).
To confirm that \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) is not a function of \({W}_{{{{{{\rm{SL}}}}}}}\) as previously believed, we compared the predictions from the YLE and Young–Dupré equation for \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) over a wider range of \({\theta }_{{{{{{\rm{R}}}}}}}\) (10°–170°) on smooth and flat surfaces. For liquid-repellent surfaces, when \({\theta }_{{{{{{\rm{R}}}}}}}\) is 90°–150°, the predictions from the YLE closely matched the experimental and numerical observations, while the classical approach overpredicted \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) (Fig. 6). Curiously, as \({\theta }_{{{{{{\rm{R}}}}}}}\)→150° and beyond, the two models appeared to converge qualitatively; however, there were subtle quantitative differences that may be relevant in practical applications (inset of Fig. 6). It should also be noted that, whereas the YLE does not need to be modified to be applied to the analysis of droplet detachment from a microtextured surface, for the Young–Dupré approach, the fraction of solid in contact with liquid must be incorporated to account for air entrapment (Cassie—Baxter state). In Fig. 6, we limited the classic Young–Dupré predictions to smooth and flat cases only; because smooth surfaces with \({\theta }_{{{{{{\rm{R}}}}}}}\) > 110° are currently unavailable.
We also considered droplet detachment from wetting surfaces, where the complete detachment of the liquid droplet from the surface may not always be possible. As revealed by our experiments, the detachment process is characterized by necking followed by the break-up of the liquid column, leaving behind a residual droplet (Supplementary Movie 1). The YLE predictions were in close agreement with the experiments, while the Young–Dupré equation overpredicted \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) considerably. For extreme cases, as \({\theta }_{{{{{{\rm{R}}}}}}}\)→0, the YLE-predicted \({\tilde{F}}_{{{{{{\rm{D}}}}}}}\) plateaus to a realistic value, while the values predicted by the Young–Dupré equation increase towards infinity because the droplet radius also increases toward infinity. This illustrates the limitations of the classic approach and the benefits of the YLE framework for droplet detachment. Notably, we also established an equivalence between detachment due to increasing gravity or increasing volume (for pendant droplets) or decreasing the interfacial tension (for sessile droplets).
Remarkably, a numerical solution for the YLE for a single data point required < 1 min on a typical laptop (1 CPU), whereas LB simulations required 2000–8000 CPU hours on a supercomputer for the same calculation. In addition to this, laboratory experiments take weeks and require significant human labor and research funding. This highlights the utility of the YLE for analyzing droplet detachment.
To conclude, this report advances the current understanding of droplet detachment physics, and the theoretical framework presented here will assist engineers in rationally designing surfaces with the appropriate chemical composition and microtexture, employing liquids to, for example, achieve complete droplet detachment, and/or tuning the relative volume of residual/detached droplets.
Methods
Sample preparation
Si wafers (p-doped, diameter of 10.2 cm, and thickness of 500 μm) and flat polystyrene were used as substrates. We grafted various silanes onto the silicon wafer using solution-phase silanization, which entailed performing piranha cleaning of the silicon wafer followed by immersing the wafer into a 1% solution of silane solution in toluene in a stirred beaker for 3 hours42. Additionally, we microfabricated arrays of cylindrical pillars with a diameter of 20 μm, a height of 50 μm, and a pitch of 25 μm. We used photolithography and dry etching following the protocols reported in previous studies49.
Contact angle measurement
Contact angles were measured using a goniometer (Krüss Drop Shape Analyzer DSA100). The advancing \({\theta }_{{{{{{\rm{A}}}}}}}\) and receding \({\theta }_{{{{{{\rm{R}}}}}}}\) contact angles were measured by adding 15 μl to a 2-6 μl droplet and removing it again at a rate of 0.2 μl/s. This process was repeated at a minimum of three different locations on each sample while recording images that were analyzed using Advance software (Krüss GmbH) to estimate the contact angles by fitting tangents at the solid–liquid–vapor interface.
Centrifugal adhesion balance experiments
The experimental droplet detachment force was measured using the Wet Scientific model CAB15G14. Each sample was cleaned by rinsing it with ethanol and water before each measurement. A liquid droplet was dispensed carefully in the middle of the sample using a micropipette. A body force was then increased incrementally until the droplet detaches from the sample.
Non-dimensional detachment force
In our CAB experiment, droplet volume \(V\) was adjusted according to the contact angle. Larger \(V\) was used for lower \({\theta }_{{{{{{\rm{R}}}}}}}\) to avoid reaching the maximum RPM value of the CAB machine, while smaller \(V\) was used for larger \({\theta }_{{{{{{\rm{R}}}}}}}\) so that the droplet does not detach by itself due to gravity. In order to see the effect of \({\theta }_{{{{{{\rm{R}}}}}}}\) to the measured detachment force \({F}_{{{{{{\rm{D}}}}}}}\) while isolating the effect of \(V\) and surface tension \(\gamma\), we express \({F}_{{{{{{\rm{D}}}}}}}\) into a non-dimensional quantity. To do this, we divided \({F}_{{{{{{\rm{D}}}}}}}\) with \(\gamma\) times a length parameter. Here, we have used \(\root 3 \of {V}\) as the relevant length parameter since it is independent of \({\theta }_{{{{{{\rm{R}}}}}}}.\)
Lattice Boltzmann (LB) simulations
The numerical investigation of the droplet detachment force was carried out using the free-energy LB method44. The free-energy model is
where \(\rho\) is the fluid density, \(\phi\) is the order parameter used as an identifier for the fluid phase, and \(c=\Delta x/\Delta t\) represents the discretization of space and time. \(A\), \(\kappa\), and \(h\) are tunable simulation parameters that set the surface tension \(\gamma\) and contact angle \(\theta\), respectively, as follows:
The hydrodynamics of the system are governed by the continuity, Navier–Stokes, and convection-diffusion equations:
where \(\vec{v}\), \(\vec{g}\), and \(\eta\) are respectively the fluid velocity, acceleration due to the body force, and viscosity. The free-energy model described in Eq. (14) enters the Navier–Stokes equation via the pressure tensor \({{{{{\bf{P}}}}}}\), whose form needs to satisfy the constraint \({\partial }_{\beta }{P}_{\alpha \beta }=\rho {\partial }_{\alpha }\left(\frac{\delta \Psi }{\delta \rho }\right)+\phi {\partial }_{\alpha }\left(\frac{\delta \Psi }{\delta \phi }\right).\) Equations (17–19) are then solved numerically using the LB algorithm44,50.
CPU details
For the LB simulations, two supercomputing nodes each with 32 CPUs with a 2.3 GHz processor speed and 128 GB of DDR4 memory running at 2300 MHz were employed. For the YLE approach, we utilized Mathematica software on a personal laptop equipped with a 2.3 GHz 8-Core Intel Core i9 processor and 16 GB 2667 MHz DDR4 RAM.
Data availability
The datasets generated and/or analyzed during the current study are available from the corresponding author on reasonable request.
Code availability
The free energy lattice Boltzmann code and Mathematica code used in the current study are available from the corresponding author on reasonable request.
References
Zheng, Y. et al. Directional water collection on wetted spider silk. Nature 463, 640–643 (2010).
Shanahan, M. E. R. On the Behavior of Dew Drops. Langmuir 27, 14919–14922 (2011).
Gao, X. et al. The dry-style antifogging properties of mosquito compound eyes and artificial analogues prepared by soft lithography. Adv. Mater. 19, 2213–2217 (2007).
Mahadik, G. A. et al. Superhydrophobicity and size reduction enabled Halobates (Insecta: Heteroptera, Gerridae) to colonize the open ocean. Sci. Rep. 10, 7785 (2020).
Parker, A. R. & Lawrence, C. R. Water capture by a desert beetle. Nature 414, 33–34 (2001).
Park, H. et al. Dynamics of splashed droplets impacting wheat leaves treated with a fungicide. J. R. Soc. Interface 17, 20200337 (2020).
Gondal, M. A. et al. Study of Factors Governing Oil–Water Separation Process Using TiO2 Films Prepared by Spray Deposition of Nanoparticle Dispersions. ACS Appl. Mater. Interfaces 6, 13422–13429 (2014).
Shi, M., Das, R., Arunachalam, S. & Mishra, H. Suppression of Leidenfrost effect on superhydrophobic surfaces. Phys. Fluids 33, 122104 (2021).
Gallo, A. Jr. et al. On the formation of hydrogen peroxide in water microdroplets. Chem. Sci. 13, 2574–2583 (2022).
Park, K.-C., Chhatre, S. S., Srinivasan, S., Cohen, R. E. & McKinley, G. H. Optimal Design of Permeable Fiber Network Structures for Fog Harvesting. Langmuir 29, 13269–13277 (2013).
Geyer, F. et al. When and how self-cleaning of superhydrophobic surfaces works. Sci. Adv. 14, 2022–2022 (2020).
Wang, H., Shi, H., Li, Y. & Wang, Y. The Effects of Leaf Roughness, Surface Free Energy and Work of Adhesion on Leaf Water Drop Adhesion. PLOS ONE 9, e107062 (2014).
Gao, L. & McCarthy, T. J. Teflon is hydrophilic. Comments on definitions of hydrophobic, shear versus tensile hydrophobicity, and wettability characterization. Langmuir 24, 9183–9188 (2008).
Gao, L. & McCarthy, T. J. Wetting 101°. Langmuir 25, 14105–14115 (2009).
Tadmor, R. Open Problems in Wetting Phenomena: Pinning Retention Forces. Langmuir 37, 6357–6372 (2021).
Quéré, D. Wetting and roughness. Annu. Rev. 38, 71–99 (2008).
Gao, N. et al. How drops start sliding over solid surfaces. Nat. Phys. 14, 191–196 (2018).
Beitollahpoor, M., Farzam, M. & Pesika, N. S. Determination of the Sliding Angle of Water Drops on Surfaces from Friction Force Measurements. Langmuir 38, 2132–2136 (2022).
Extrand, C. W. & Kumagai, Y. Liquid Drops on an Inclined Plane: The Relation between Contact Angles, Drop Shape, and Retentive Force. J. Colloid Interface Sci. 170, 515–521 (1995).
Samuel, B., Zhao, H. & Law, K. Y. Study of wetting and adhesion interactions between water and various polymer and superhydrophobic surfaces. J. Phys. Chem. C. 115, 14852–14861 (2011).
Sun, Y. et al. Direct measurements of adhesion forces of water droplets on smooth and patterned polymers. Surf. Innov. 6, 93–105 (2017).
Sun, Y., Li, Y., Dong, X., Bu, X. & Drelich, J. W. Spreading and adhesion forces for water droplets on methylated glass surfaces. Colloids Surf. A: Physicochemical Eng. Asp. 591, 124562 (2020).
Liimatainen, V. et al. Mapping microscale wetting variations on biological and synthetic water-repellent surfaces. Nat. Commun. 8, 1798 (2017).
Daniel, D. et al. Mapping micrometer-scale wetting properties of superhydrophobic surfaces. Proc. Natl Acad. Sci. USA 116, 25008–25012 (2019).
Farhan, N. M. & Vahedi Tafreshi, H. Universal expression for droplet-fiber detachment force. J. Appl. Phys. 124, 075301 (2018).
Jamali, M. & Tafreshi, H. V. Measuring Force of Droplet Detachment from Hydrophobic Surfaces via Partial Cloaking with Ferrofluids. Langmuir 36, 6116–6125 (2020).
de Gennes, P.-G., Brochard-Wyart, F., & Quéré, D. Capillarity and Wetting Phenomena. (Springer New York, 2004).
Israelachvili, J. N. Intermolecular and Surface Forces 3rd Edition (Elsevier Inc., 2011).
Butt, H. J. et al. Characterization of super liquid-repellent surfaces. Curr. Opin. Colloid Interface Sci. 19, 343–354 (2014).
Tadmor, R. et al. Solid-Liquid Work of Adhesion. Langmuir 33, 3594–3600 (2017).
Extrand, C. W. Comment on “solid-Liquid Work of Adhesion”. Langmuir 33, 9241–9242 (2017).
Gulec, S., Yadav, S., Das, R. & Tadmor, R. Reply to Comment on “Solid–Liquid Work of Adhesion”. Langmuir 33, 13899–13901 (2017).
de la Madrid, R. et al. Comparison of the Lateral Retention Forces on Sessile, Pendant, and Inverted Sessile Drops. Langmuir 35, 2871–2877 (2019).
Tadmor, R., Tang, S., Yao, C.-W., Gulec, S. & Yadav, S. Comment on “Comparison of the Lateral Retention Forces on Sessile, Pendant, and Inverted Sessile Drops”. Langmuir 36, 475–476 (2020).
de la Madrid, R. et al. Reply to Comment on “Comparison of the Lateral Retention Forces on Sessile, Pendant, and Inverted Sessile Drops”. Langmuir 36, 477–478 (2020).
Jiang, Y. & Choi, C. H. Droplet Retention on Superhydrophobic Surfaces: A Critical Review. Adv. Mater. Interfaces 8, 202001205 (2021).
de la Madrid, R., Luong, H. & Zumwalt, J. New insights into the capillary retention force and the work of adhesion. Colloids Surf. A: Physicochem. Eng. Asp. 637, 128195 (2022).
Good, R. J. & Koo, M. N. The effect of drop size on contact angle. J. Colloid Interface Sci. 71, 283–292 (1979).
Adamson, A. W., & Gast, A.P. Physical Chemistry of Surfaces 6th Edition (John Wiley & Sons, Inc., 1997).
Tadmor, R. Line Energy and the Relation between Advancing, Receding, and Young Contact Angles. Langmuir 20, 7659–7664 (2004).
Meuler, A. J. et al. Relationships between Water Wettability and Ice Adhesion. ACS Appl. Mater. Interfaces 2, 3100–3110 (2010).
Gallo, A., Tavares, F., Das, R. & Mishra, H. How particle-particle and liquid-particle interactions govern the fate of evaporating liquid marbles. Soft Matter 17, 7628–7644 (2021).
Shrestha, B. R. et al. Nuclear Quantum Effects in Hydrophobic Nanoconfinement. J. Phys. Chem. Lett. 10, 5530–5535 (2019).
Kusumaatmaja, H. & Yeomans, J. M. Lattice boltzmann simulations of wetting and drop dynamics. In: Simulating Complex Systems by Cellular Automata (eds. Kroc, J., Sloot, P. M. A. & Hoekstra, A. G.) 241–274 (Springer Berlin Heidelberg, 2010).
Whyman, G., Bormashenko, E. & Stein, T. The rigorous derivation of Young, Cassie–Baxter and Wenzel equations and the analysis of the contact angle hysteresis phenomenon. Chem. Phys. Lett. 450, 355–359 (2008).
Kaufman, Y. et al. Simple-to-Apply Wetting Model to Predict Thermodynamically Stable and Metastable Contact Angles on Textured/Rough/Patterned Surfaces. J. Phys. Chem. C. 121, 5642–5656 (2017).
O’Brien, S. B. G. M. & van den Brule, B. H. A. A. Shape of a small sessile drop and the determination of contact angle. J. Chem. Soc., Faraday Trans. 87, 1579–1583 (1991).
Padday, J. F. & Pitt, A. R. The stability of axisymmetric menisci. Philos. Trans. R. Soc. Lond. Ser. A, Math. Phys. Sci. 275, 489–528 (1973).
Domingues, E. M., Arunachalam, S. & Mishra, H. Doubly Reentrant Cavities Prevent Catastrophic Wetting Transitions on Intrinsically Wetting Surfaces. ACS Appl. Mater. Interfaces 9, 21532–21538 (2017).
Krüger, T. et al. The Lattice Boltzmann Method: Principles and Practice 1st Edition. (Springer International Publishing, 2017).
Haynes WM. CRC Handbook of Chemistry and Physics 97th Edition. (CRC Press, 2016).
Acknowledgements
This study was supported by funding from King Abdullah University of Science and Technology (KAUST) under award number BAS/1/1070-01-01. The co-authors thank Mr. Edelberto Manalastas for building a new sample holder for the CAB, which simplified the experiments, Prof. Rafael Tadmor from Ben-Gurion University, Israel, for fruitful discussions, and Mr. Xavier Pita (KAUST) for the illustration presented in Fig. 1A. MSS thanks Dr. Ciro Semprebon, Dr. Dan Daniel, and Dr. Meng Shi for fruitful discussions. This study used the computational resources of the Supercomputing Laboratory at King Abdullah University of Science & Technology (KAUST) in Thuwal, Saudi Arabia.
Author information
Authors and Affiliations
Contributions
H.M. designed and planed the experiments. M.S.S. performed LB simulations and data analysis. Y.X. prepared the samples and carried out CAB experiments. S.A. performed photolithography and provided the microtextured surfaces. M.S.S. and Y.X. developed the theoretical approach. M.S.S. and H.M. wrote the manuscript. All authors reviewed and approved the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Physics thanks the anonymous reviewers for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sadullah, M.S., Xu, Y., Arunachalam, S. et al. Predicting droplet detachment force: Young-Dupré Model Fails, Young-Laplace Model Prevails. Commun Phys 7, 89 (2024). https://doi.org/10.1038/s42005-024-01582-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s42005-024-01582-0
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
