
Abstract
In the realm of nonlinear dynamics, the Belousov-Zhabotinsky reaction system has long held the fascination of researchers. The Belousov-Zhabotinsky system continues to be an active area of research, offering insights into the fundamental principles of nonlinear dynamics in complex systems. To deepen our understanding of this intricate system, we introduce a pioneering approach to tackle the time fractional Belousov-Zhabotinsky system, employing the Caputo and Atangana-Baleanu Caputo fractional derivatives with the double Laplace method. The solution we obtained is in the form of series which helps in investigating the accuracy of the proposed method. The primary advantage of the proposed technique lies in the low amount of calculations required and produce high degree of precision in the solutions. Furthermore, the existence and uniqueness of the solution are investigated thereby enhancing the overall credibility of our study. To visually represent our results, we present a series of 2D and 3D graphical representations that vividly illustrate the behavior of the model and the impact of changing the fractional order derivative and the time on the obtained solutions.
Similar content being viewed by others

Introduction
Fractional calculus, a branch of mathematical analysis that generalizes the concept of differentiation and integration to non-integer orders, has gained increasing prominence in various scientific disciplines over the past few decades. Initially introduced by Leibniz in the 17th century and developed by several mathematicians in subsequent centuries1,2. Fractional calculus is now recognized as a powerful tool for modeling and analyzing complex phenomena with memory and non-local behaviors, it finds extensive applications in a wide range of engineering and scientific domains, encompassing fields such as chemistry, physics, economics, biology, and finance3,4,5,6,7. There are many definitions of fractional calculus, including, the Riemann-Liouville (\(\textsf{RL}\)) definition focuses on historical memory and is suitable for analyzing processes with memory effects8. On the other hand, the Caputo definition incorporates initial conditions, making it particularly useful for modeling systems with specific starting conditions9,10, Riesz fractional derivative is often used in physics and engineering, especially in the context of fractional diffusion and wave equations11,12. Caputo-Fabrizio (\(\textsf{CF}\))derivative has been arising recently to overcome the singularity on the integral kernel13,14. The Atangana-Baleanu (\(\textsf{AB}\)) fractional derivative is a relatively recent development in fractional calculus, it is known for its capability to effectively capture memory effects and non-local behavior, making it suitable for various applications15, and many other definitions, each of which has its distinguishing characteristics. Solving nonlinear problems with fractional orders can pose greater challenges due to the involvement of integral operators. Nevertheless, various computational approaches have been devised and applied to explore both precise and numerical solutions for such fractional problems16,17,18. Fractional systems of partial differential equations(PDEs) have garnered significant attention because of their ability to effectively represent intricate phenomena that go beyond the descriptive capacity of traditional integer-order models19,20, this is because, unlike ordinary derivatives, which describe the rate of change of a function at a specific point, fractional derivatives account for the past behavior of the function over a range of values. They are known to capture non-local and memory effects, which means they can take into account the entire history of a function rather than just its current value. This property enables fractional derivatives to describe the real life applications.
In this study, we aim to investigate the time fractioal Belousov-Zhabotinsky system (TFBZS) in the form:
Constrained by the starting conditions:
Where \(\theta\) is the fractional order derivative \(0 <\theta \le 1\). \(\textsf{p}(x,t)\) and \(\textsf{w}(x,t)\) are the concentration in chemical reaction as a function of temporal oscillations and spatial traveling concentration waves. \(\zeta _1\) and \(\zeta _2\) represent the diffusing constants, in this study, we consider \(\zeta _1=\zeta _2=1\), \(\beta , \delta , \gamma\) and \(\lambda\) are positive constants and \(\lambda \ne 1\). Due to the importance of this system, many researchers have dealt with this system, whether using fractional calculus or ordinary calculus, to obtain exact and approximate solutions, Ali Jaradat et al. present a numerical solution for the TFBZS using generalized Taylor series21. Akinyemi22 investigted the TFBZS using q-homotopy analysis transform method. Alaoui et al.23 provide an approximate solution for the proposed system using homotopy perturbation method with Yang transform. Karaagac et al.24applied the Picard-Lindelöf theorem to the proposed model under \(\textsf{ABC}\) fractional derivative. Veeresha25 presented a brief analysis for this chemical reaction under Caputo fractional derivative. Recently, El-Tantawy et al.26 presented an approximate solution for the TFBZS using residual power series merged with Laplace transform. Yasmin et al.27 investigated this system using homotopy perturbation with Elzaki transform.
In this study, we use the double Laplace method (DLM) merged with Adomian polynomials to enable us deal with nonlinear terms28,29,30 under two types of fractional derivatives, Caputo (\(\textsf{C}\)) and Atangana-Baleanu-Caputo (\(\textsf{ABC}\)) fractional derivatives.
The structure of this article is as follows: In section “Basic definitions”, we provide an overview of the essential concepts employed to solve the proposed equation, including fractional derivatives and integrals, as well as Adomian polynomials. In section “Framework of Double Laplace method”, we introduce the framework of the DLM in the sense of \(\textsf{C}\) and \(\textsf{ABC}\) fractional derivative as a method for finding an approximate solution. In section “Analysis of the existence and uniqueness of the solution”, we delve into discussions regarding the existence, and uniqueness of the solution. Section “Solution of the TFBZS using DLM” offers a concise explanation of the solution of the TFBZS using DLM. The outcomes derived in section “Solution of the TFBZS using DLM” are visually represented in section “Graphic representations”. Finally, the concluding remarks of this study are presented in section “Conclusion”.
Basic definitions
Fractional derivatives
As we mentioned earlier, there are many definitions of fractional differentiation, each of them has its own advantages and disadvantages. It’s important to highlight that Caputo’s definition is applicable solely to functions that are differentiable. In 2016 Abdon Atangana and Dumitru Baleanu presented a new fractional derivative with non-local and no-singular kernel that depend on Mittag-Leffler function31. The studies conducted in recent years following these advancements clearly indicate that scientists have a significant opportunity to address a variety of issues using fractional derivatives.
In this research, our objective is to solve TFBZS using DLM in the sense of Caputo and ABC fractional derivative.
Definition 2.1
2: Caputo fractional derivative is defined as:
\(\jmath ^{ p -\theta }\) represents the \(\textsf{RL}\) fractional integral in the form:
\(\Gamma (.)\) is the known Gamma function.
The operator \(\jmath ^{\theta }\) satisfy the following properties for \(\mathcal {E},\mathcal {G} \ge -1\):
Caputo fractional derivative satisfy:
Definition 2.2
32: \(\textsf{ABC}\) fractional integral is in the form:
\({\mathcal {N}(\theta )}\) represents the normalization function in which \({\mathcal {N}(0)}= {\mathcal {N}(1)}=1\).
In this study, for simplicity, we will consider \({\mathcal {N}(\theta )}=1\).
Definition 2.3
32: \(\textsf{ABC}\) fractional derivative is in the form:
Further details in different types of fractional derivatives in33,34,35,36.
Adomian polynomials
The Adomian decomposition technique has introduced the concept that the unknown linear function \(\mathcal {Q}\) can be represented through a sequence of decompositions:
The elements \(\mathcal {Q}_\mathfrak {j}\) can be recursively calculated, and the nonlinear term \(\mathcal {F}(\mathcal {Q})\), which could include expressions like \(\mathcal {Q}^2, \mathcal {Q}^3, \sin \mathcal {Q}, exp(\mathcal {Q})\), etc. can be represented using Adomian polynomials \((\mathcal{A}\mathcal{P})\) denoted as \(\mathcal {A}_\mathfrak {j}\) within the structure:
The calculation of \(\mathcal{A}\mathcal{P}\) is used to handle different forms of nonlinearity. Adomian37 introduced a technique for computing \(\mathcal{A}\mathcal{P}\), which has been formally validated. Other methods based on Taylor series have also been developed, as discussed in38,39. To compute the \(\mathcal{A}\mathcal{P}\), \(\mathcal {A}_\mathfrak {j}\) for the nonlinear term \(\mathcal {F}(\mathcal {Q})\), you can apply the following general formula:
Expression (14) can be expanded as follows:
From the relations presented in (15), we notice that \(\mathcal {A}_0\) depends only on \(\mathcal {Q}_0\), \(\mathcal {A}_1\) depends only \(\mathcal {Q}_0\) and \(\mathcal {Q}_1\), \(\mathcal {A}_2\) depends only on \(\mathcal {Q}_0\),\(\mathcal {Q}_1\) and \(\mathcal {Q}_2\), etc.
Framework of Double Laplace method
The double Laplace transform method serves as a valuable mathematical tool for addressing fractional nonlinear equations or systems of equations. This technique proves particularly effective when dealing with equations featuring Caputo, Caputo-Fabrizio, or Atangana-Baleanu-Caputo fractional derivatives. By applying the Laplace transform twice, it enables the conversion of intricate fractional differential equations into more accessible algebraic forms. This transformation simplifies the process of solving fractional differential equations. Moreover, it can be combined with methods like Adomian polynomials, see32,40 to effectively handle nonlinear terms within these equations. This approach significantly enhances our capability to analyze and solve real-world problems across various scientific and engineering domains.
Definition 3.1
32 The expression for the Double Laplace transform using Caputo fractional derivative when \(p-1 <\theta \le p\) can be described as follows:
Definition 3.2
32 The expression for the Double Laplace transform using Atangana-Baleanu-Caputo fractional derivatives when \(p-1 <\theta \le p\) can be described as follows:
for \(p =1,2,3,\ldots\).
Analysis of the existence and uniqueness of the solution
In this section, we will establish the existence and the uniqueness of the TFBZS within the context of the \(\textsf{ABC}\) sense. To do so, let’s rewrite the couple sytem (1) in the following form:
Constrained by:
apply \(\textsf{ABC}\) fractional integral (Definition 2.2) to both sides of the system equations (20),
where \(\textsf{K}_1\) and \(\textsf{K}_2\) represent the right hand sides of the system, actually, they called the kernels \(\textsf{K}_1(x,t,\textsf{p})\) and \(\textsf{K}_2(x,t,\textsf{w})\), for simplicity we will write \(\textsf{K}_1(\textsf{p})\) and \(\textsf{K}_2(\textsf{w})\).
Assume that \(\textsf{p}(x,t)\) and \(\textsf{w}(x,t)\) have an upper bound if the kernels \(\textsf{K}_1(\textsf{p})\) and \(\textsf{K}_2(\textsf{w})\) satisfy the Lipschitz condition, hence
The subsequent iterative formulas for \(\textsf{p}(x,t)\) and \(\textsf{w}(x,t)\) are formulated:
The \(\textsf{p}\) and \(\textsf{w}\) recursive terms will be:
and
where the estimate solutions for \(\textsf{p}\) and \(\textsf{w}\) are:
and
Hence,
similarly,
Theorem 4.1
If the following inequalities are satisfied, then the proposed system (20) having a solution:
Proof
From the existence of equation (26) as a solution os the first equation of the proposed system, assume that:
then
By assuming that \(\textsf{p}(x,t)\) is bounded function, apply recursive method for Eq. (28), we get
Using relation (33) with the inequality (32), we obtain:
At \(t=t_0\), Eq. (34) becomes:
Similarily, we can show that,
where \(\textsf{H}_\mathfrak {r}(x,t)= \textsf{w}(x,t)-\textsf{w}(x,0)\). To prove the uniqueness of the solution, consider that \(\textsf{p}(x,t)\) has two solutions \(\textsf{p}(x,t)\) and \(\textsf{q}(x,t)\), hence
Putting norm on both sides of Eq. (37),
Thus,
Hence, \(\parallel \textsf{p}(x,t) - \textsf{q}(x,t)\parallel =0\) when \(\bigg ( 1-\dfrac{1-\theta }{\mathcal {N}(\theta ) }\varrho _1- \frac{\theta }{\mathcal {N}(\theta ) \Gamma (\theta )}\varrho _1 t^\theta \bigg )>0\), therefore \(\textsf{p}(x,t)=\textsf{q}(x,t)\).
The same conclusion can be drawn for \(\textsf{w}(x,t)\). \(\square\)
Solution of the TFBZS using DLM
In this section, the DLM is applied to the TFBZS to find approximate solutions, the system will be investigated under two types of initial conditions22.
Case I : For \(\beta =\gamma =0\) , Eq. (1) will be:
Under initial conditions:
The exact solution at \(\theta =1\) is:
Using Caputo DLTM:
Apply the DL formula (17) into both sides of the system (40),
Then
and
where, \(\mathscr {N}_\mathfrak {j}\) and \(\mathscr {M}_\mathfrak {j}\) are the Adomian polynomials for the nonlinear terms \(\textsf{p}^2\) and \(\textsf{p}\textsf{w}\) respectively. Hence,
To find the unknown functions \(\textsf{p}\) and \(\textsf{w}\), take inverse DL to both sides of Eq. (44), hence
Similarily,
If we truncate the solution at two iterations, the form of the approximate series solution will ultimately be as follows:
Table 1 represents the exact and approximate values of the unknown functions \(\textsf{p}\) and \(\textsf{w}\) and the absolute error for case I under Caputo fractional derivative at \(\theta =1\), \(t=0.01\), \(\delta =1\) and \(\lambda =1.5\) or varying x values.
Using Atangana-Baleanu-Caputo DLTM:
Apply formula (19) to the TFBZS (40),
Then
and,
Hence,
Taking inverse DL to both sides of equation (55) to obtain the recursive values of \(\textsf{p}\) and \(\textsf{w}\).
Similarily,
The final form of the estimated series solution with two iterations will ultimately be as follows:
Table 2 represents the Precise and estimated solutions for the unknown functions \(\textsf{p}\) and \(\textsf{w}\) of the TFBZS and the absolute error for case I under \(\textsf{ABC}\) fractional derivative at \(\theta =1\), \(t=0.01\), \(\delta =1\) and \(\lambda =1.5\) for various values of x.
Case II : For \(\gamma =\lambda\), and \(\beta =1\), Eq. (1) will be:
Under initial conditions conditions:
The exact solution at \(\theta =1\) is:
Using Caputo DLTM:
Apply the DL formula (17) into both sides of the system (63), and follow the same procedure discussed in Case I, we obtain the following solutions:
Similarily,
Finally, the approximate two iterations series solution of case II under Caputo fractional derivative will be in the form:
Table 3 represents the exact, approximate and the absolute error results from solving the TFBZS (case II) at \(\theta =1\), \(t=0.01\), \(\delta =2\) and \(\lambda =2\) for varying x-values.
Using Atangana-Baleanu-Caputo DLTM:
Apply the DL formula (19) into both sides of the system (63), and perform the same steps presented in Case I to obtain the following results:
Similarily,
The final approximate two iterations series solution using \(\textsf{ABC}\) fractional derivative for DLM for Case II will be:
Table 4 represents the precise, approximate and the absolute error results from solving the TFBZS (case II) using \(\textsf{ABC}\) fractional derivative at \(\theta =1\), \(t=0.01\), \(\delta =3\) and \(\lambda =2\) for various x values.
Considering the results we obtained from solving the two cases of initial conditions with different definitions, we notice that the Caputo results are very close to that results for Atangana-Baleanu-Caputo when the fractional order derivative \(\theta =1\). Therefore, Table 5 illustrates a comparison for the results we obtained for the two cases when \(\theta <1\).
Graphic representations
Graphic representations offer a visual context that enhances the comprehension of data and results. They provide an immediate and intuitive understanding of the relationships, and patterns present in the data, making it easier for researchers and readers to grasp the significance of the findings.

The estimated solution of the TFBZS (Case I) under \(\textsf{C}\) fractional derivative presented in Eq. (51) at \(\delta =1\) and \(\lambda =1.5\).

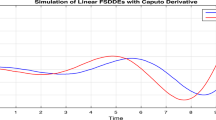
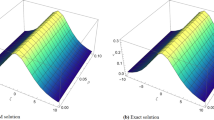
The approximate and exact solutions of the TFBZS (Case I) under \(\textsf{C}\) fractional derivative presented in Eq. (51) at \(\delta =1\) and \(\lambda =1.5\).

The estimated solution of the TFBZS (Case I) under \(\textsf{ABC}\) fractional derivative presented in Eq. (62) at \(\delta =1\) and \(\lambda =1.5\).

The approximate solution of the TFBZS (Case I) under \(\textsf{ABC}\) fractional derivative presented in Eq. (62) at \(\delta =1\) and \(\lambda =1.5\).
Two and three dimensions graphs for the obtained solutions are presented to visualize the behavior of the TFBZS using two different cases of initial conditions each case was dealt with in two definitions of fractional calculus \(\textsf{C}\) and \(\textsf{ABC}\). Figure 1 represents the two-dimensional visualization at different fractional order parameter values \(\theta\) with fixed time \(t=0.5\), and at \(\theta =1\) for several steps of time, this in for the first case of initial conditions using DL Caputo. Figure 2 shows the three-dimensional approximate and exact representation for case I using \(\textsf{C}\), the graphs shows great coincides between exact and estimated solution which reflect the efficiency of the used method. Figure 3 clarify the 2D solution of the TFBZS (case I) using \(\textsf{ABC}\) DLM for the two unknown functions \(\textsf{p}\) and \(\textsf{w}\) at different values of \(\theta\) with fixed time and at several stages of time with fixed \(\theta =1\). Figure 4 shows the approximate solution in three-dimensions of the TFBZS at \(\delta =1\) and \(\lambda =1.5\). The graphs using \(\textsf{C}\) and \(\textsf{ABC}\) also very close to each other, this means that either using \(\textsf{C}\) DLM or \(\textsf{ABC}\) DLM, we obtain high solution accuracy. Figure 5 shows the estimated solution of using DLM using \(\textsf{C}\) for case II of initial conditions. Figure 6 represents the exact and approximate solution in three-dimensions for case II, its clear that, the estimated solution is nearly the exact solution at the same values of parameters. Figures 7 and 8 represent the obtained solution in two- and three-dimensions using \(\textsf{ABC}\) DLM for case II of initial conditions. All the represented graphs show coincides between the estimated and exact solution which ensures the validity of the DLM for solution.

The estimated solution of the TFBZS (Case II) under \(\textsf{C}\) fractional derivative presented in Eq. (67) at \(\delta =2\) and \(\lambda =2\).

The exact and approximate solution of the TFBZS (Case II) under \(\textsf{C}\) fractional derivative presented in Eq. (67) at \(\delta =2\) and \(\lambda =2\).

The estimated solution of the TFBZS (Case II) under \(\textsf{ABC}\) fractional derivative presented in Eq. (71) at \(\delta =2\) and \(\lambda =2\).

The approximate 3D solution of the TFBZS (Case II) under \(\textsf{ABC}\) fractional derivative presented in Eq. (71) at \(\delta =2\) and \(\lambda =2\).
Conclusion
In this study, we obtain an approximate series solution for the TFBZS using DLM under varying initial conditions. Each initial condition was examined using both Caputo and Atangana-Baleanu Caputo fractional derivatives. The results obtained showcased an impressive level of accuracy, with errors consistently maintained at a remarkably low magnitude. Furthermore, we conducted a thorough investigation into the existence and uniqueness aspects of the solution, establishing a robust foundation for the validity of our approach. In order to understand the behavior of the solution, we present two and three dimensional graphs to show the impact of the time and the fractional derivative of the solution. The graphs of approximate and exact solution demonstrate a close resemblance, indicating the accuracy of the obtained solutions.
For the future directions, we envision expanding the application of the DLM to other complex fractional systems with higher-order fractional derivatives that analyze a real world applications. This can involve exploring the applicability of the method in multi-dimensional fractional systems.
Use of AI tools declaration
The authors confirm that they did not utilize any Artificial Intelligence (AI) tools in the development of this article.
Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Podlubny, I. Fractional Differential Equations (Academic Press, San Diego, 1999).
Lazarevic, M. Advanced Topics on Applications of Fractional Calculus on Control Problems, System Stability and Modeling (WSEAS Press, UK, 2014).
Ali, K. K. & Maneea, M. Optical solitons using optimal homotopy analysis method for time-fractional (1+1)-dimensional coupled nonlinear Schrodinger equations. Optik 283, 170907 (2023).
Fan, Z., Ali, K. K., Maneea, M., Inc, M. & Yao, S. Solution of time fractional Fitzhugh-Nagumo equation using semi analytical techniques. Results Phys. 51, 106679 (2023).
Chen, Q., Baskonus, H. M., Gao, W. & Ilhan, E. Soliton theory and modulation instability analysis: The Ivancevic option pricing model in economy. Alexandr. Eng. J. 61, 7843–7851 (2022).
Ucar, E., Ozdemir, N. & Altun, E. Fractional order model of immune cells influenced by cancer cells. Math. Model. Nat. Phenom. 14(3), 141 (2019).
Ali, K. K., Maaty, M. A. & Maneea, M. Optimizing option pricing: Exact and approximate solutions for the time-fractional Ivancevic model. Alexandr. Eng. J. 84, 59–70 (2023).
Hilfer, R. Fractional diffusion based on Riemann-Liouville fractional derivatives. J. Phys. Chem. B 104, 3914–3917 (2000).
Gao, G., Sun, Z. & Zhang, H. A new fractional numerical differentiation formula to approximate the Caputo fractional derivative and its applications. J. Comput. Phys. 259, 33–50 (2014).
Elsaid, A., Abdel Latif, M. S. & Maneea, M. Similarity solutions of fractional order heat equations with variable coefficients. Miskolc Math. Notes 17(1), 245–254 (2016).
Elsaid, A., Abdel-Latif, M. S. & Maneea, M. Similarity solutions for solving Riesz fractional partial differential equations. Progress Fract. Differ. Appl. 2(4), 293–298 (2016).
Patra, A. Similarity analytical solutions for the Schr?dinger equation with the Riesz fractional derivative in quantum mechanics. Math. Methods Appl. Sci. 43, 10287–10295 (2020).
Caputo, M. & Fabrizio, M. A new definition of fractional derivative without singular kernel. Progress Fract. Differ. Appl. 1(2), 1–13 (2015).
Losada, J. & Nieto, J. J. Properties of a new fractional derivative without singular kernel. Progress Fract. Differ. Appl. 2, 87–92 (2015).
Sweilam, N. H., Al-Mekhlafi, S. M., Assiri, T. & Atangana, A. Optimal control for cancer treatment mathematical model using Atangana-Baleanu-Caputo fractional derivative. Adv. Differ. Equ. 2020, 334 (2020).
Ray, S. S. Nonlinear Differential Equations in Physics (Springer, Uk, 2020).
He, J. H. Some applications of nonlinear fractional differential equations and their applications. Bull. Sci. Technol. Soc. 15(2), 86–90 (1999).
Kilbas, A. A., Srivastava, H. M. & Trujillo, J. J. Theory and Applications of Fractional Differential Equations (Elsevier, Amsterdam, 2006).
Veeresha, P., Prakasha, D. G. & Baskonus, H. M. Solving smoking epidemic model of fractional order using a modified homotopy analysis transform method. Math. Sci. 13, 115–128 (2019).
Ali, K. K., Maneea, M. & Mohamed, M. S. Solving nonlinear fractional models in superconductivity using the q-Homotopy analysis transform method. J. Math. 23, 6647375 (2023).
Jaradat, A., Noorani, M. S., Alquran, M. & Jaradat, H. M. Numerical investigations for time-fractional nonlinear model arise in physics. Results Phys. 2018, 1034–1037 (2018).
Akinyemi, L. A fractional analysis of Noyes?Field model for the nonlinear Belousov-Zhabotinsky reaction. Comput. Appl. Math. 39(175), 145 (2020).
Alaoui, M. K., Fayyaz, R., Khan, A., Shah, R. & Abdo, M. S. Analytical investigation of Noyes-FieldModel for time-fractional Belousov-Zhabotinsky reaction. Complexity 21, 3248376 (2021).
Karaagac, B., Owolabi, K. M. & Pindza, E. Analysis and new simulations of fractional Noyes-Field model using Mittag-Leffler kernel. Sci. Afr. 17, e01384 (2022).
Veeresha, P. The efficient fractional order based approach to analyze chemical reaction associated with pattern formation. Chaos Solit. Fract. 165, 112862 (2022).
El-Tantawy, S. A. et al. A comparative study of the fractional-order Belousov-Zhabotinsky system. Mathematics 11(1751), 745 (2023).
Yasmin, H., Alshehry, A. S., Khan, A., Shah, R. & Nonlaopon, K. Numerical analysis of the fractional-order Belousov-Zhabotinsky system. Symmetry 15(834), 236 (2023).
Dunde, R. R. & Waghmare, G. L. Double laplace transform method for solving space and time fractional telegraph equations. Int. J. Math. Math. Sci. 7, 1414595 (2016).
Omran, M. & Kilicman, A. Fractional double Laplace Transform and its properties. AIP Conf. Proc. 1795, 020021 (2017).
Khan, A., Khan, T. S., Syam, M. I. & Khan, H. Analytical solutions of time-fractional wave equation by double Laplace transform method. Eur. Phys. J. Plus 134(163), 452 (2019).
Atangana, A. & Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. J. Therm. Sci. 20, 763–9 (2016).
Alfwzan, W. et al. Analysis of fractional non-linear tsunami shallow-water mathematical model with singular and non singular kernels. Results Phys. 52, 106707 (2023).
Ucar, S. Analysis of a basic SEIRA model with Atangana-Baleanu derivative. AIMS Math. 5(2), 1411–1424 (2020).
Ucar, E., Ucar, S., Evirgen, F. & Ozdemir, N. Investigation of E-Cigarette Smoking Model with Mittag-Leffler Kernel. Found. Comput. Dec. Sci. 46(1), 97–109 (2021).
Ucar, S. Existence and uniqueness results for a smoking model with determination and education in the frame of non-singular derivatives. Discrete Contin. Dyn. Syst. Ser. S 14(7), 2571–2589 (2021).
Ucar, E. & Ozdemir, N. New fractional cancer mathematical model via IL-10 cytokine and anti-PD-L1 inhibitor. Fractal Fract. 7, 151 (2023).
Adomian, G. & Rach, R. Modified adomian polynomials. Math. Comput. Model. 24(11), 39–46 (1996).
Fatoorehchi, H. & Abolghasemi, H. Improving the differential transform method: A novel technique to obtain the differential transforms of nonlinearities by the Adomian polynomials. Appl. Math. Model. 37, 6008–6017 (2013).
Wua, G., Baleanu, D. & Luo, W. Analysis of fractional non-linear diffusion behaviors based on adomian polynomials. Therm. Sci. 21(2), 813–817 (2017).
Rahman, F., Ali, A. & Saifullah, S. Analysis of time-fractional \(\phi ^4\)-equation with singular and non-singular kernels. Int. J. Appl. Comput. Math. 7, 192 (2021).
Acknowledgements
The authors extend their appreciation to the Deanship for Research & Innovation, Ministry of Education in Saudi Arabia for funding this research work through the project number : IFP22UQU4290491DSR125.
Author information
Authors and Affiliations
Contributions
The authors affirm that the study was conducted through collaborative efforts with equal responsibility. All authors have thoroughly reviewed and endorsed the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Alsallami, S.A.M., Maneea, M., Khalil, E.M. et al. Insights into time fractional dynamics in the Belousov-Zhabotinsky system through singular and non-singular kernels. Sci Rep 13, 22347 (2023). https://doi.org/10.1038/s41598-023-49577-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-49577-1
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
