
Abstract
As the population grows, industry and agriculture have also developed and water resources require quantitative and qualitative management. Currently, the management of water resources is essential in the exploitation and development of these resources. For this reason, it is important to study water level fluctuations to check the amount of underground water storage. It is vital to study the level of underground water in Khuzestan province with a dry climate. The methods which exist for predicting and managing water resources are used in studies according to their strengths and weaknesses and according to the conditions. In recent years, artificial intelligence has been used extensively for groundwater resources worldwide. Since artificial intelligence models have provided good results in water resources up to now, in this study, the hybrid model of three new recombined methods including FF-KNN, ABC-KNN and DL-FF-KNN-ABC-MLP has been used to predict the underground water level in Khuzestan province (Qale-Tol area). The novelty of this technique is that it first does classification by presenting the first block (combination of FF-DWKNN algorithm) and predicts with the second block (combination of ABC-MLP algorithm). The algorithm’s ability to decrease data noise will be enabled by this feature. In order to predict this key and important parameter, a part of the data related to wells 1–5 has been used to build artificial intelligence hybrid models and also to test these models, and to check this model three wells 6–8 have been used for the development of these models. After checking the results, it is clear that the statistical RMSE values of this algorithm including test, train and total data are 0.0451, 0.0597 and 0.0701, respectively. According to the results presented in the table reports, the performance accuracy of DL-FF-KNN-ABC-MLP for predicting this key parameter is very high.
Similar content being viewed by others

Introduction
Underground water is one of the most important natural resources in desert and semi-desert countries. Underground water sources are used to provide water for industry, agriculture, and drinking water1,2. In fact, the primary source of water supply used in agriculture is underground water3. Consequently, excess extraction of these resources has become a major problem in recent years4. Underground water is dynamic and can adapt to short-term and long-term changes in weather conditions, groundwater extraction, and land use changes. Moreover, the balance between charging and discharging aquifers controls the level of underground water. Groundwater management is facing problems due to lack of water, irregular and indirect rainfall, as well as lack of surface water in desert and semi-desert regions5. Furthermore, the amount of groundwater is an integral part of groundwater management6. Reduction in underground water supply the overexploitation of these sources reduce the amount of groundwater over time, which causes problems. Problems include salinization of underground water7, integrating of salt water with fresh water, and the increased level of industrial pollutants8. Since it is difficult to check the level of underground water in large areas and also it is very difficult to use direct and field methods, the use of modern methods such as artificial intelligence algorithms are more efficient due to less cost and time6,9,10.
In 2020, Kumar et al. used ELM, GPR and DL to predict the underground water level in Japan. The data used in this study are precipitation, temperature, river flow, nutrition, and depth of underground water. The results obtained from this study showed that the model used in the study (RMSE = 0.04, R = 0.99, NSE = 0.98) is more accurate in predicting the level of underground water. Their report demonstrates that the DL model performs better on small datasets11. In the same year, Sahu et al. utilized various input variables such as river flow levels, temperature, groundwater, and precipitation to forecast the underground water level in California, USA. The study employed MLP and DL models to predict these algorithms. The findings revealed that DL models were effective in forecasting the underground water level12. Emamgholizadeh and Mohammadi presented a new hybrid method based on SVM, PSO, and IWO models with SVM-PSOIWO structure for estimating soil exchange capability (CEC). Based on the findings of this paper, it can be concluded that the novel combination algorithm, when applied to the prediction of a three-month period with RMSE (R2) of 0.229 Cmol + kg−1 (0.924), has a high degree of accuracy13. Vadiati et al., by FL, ANFIS and SVM predicted the underground water level in the Tehran Karaj plain. The data used in this study are: total rainfall, evaporation of groundwater, average temperature, and total transpiration and monthly average river flow. Their results have been shown ANFIS is highly accurate in prediction of underground water level, but all three methods used in this study have good performance. The models used in this study predict the underground water level for the next 1 and 2 months, and the prediction of these models for the next 3 months is also acceptable14. Mohammadi predicted Peru’s hydrological conditions over the course of 3, 6, and 24 months using the ANN-FA model. The standardized precipitation index (SPI) of the surrounding areas is used as input data in this study. The findings for this new approach, which have RMSE = 0.29 and R = 0.94, demonstrate the excellent level of performance accuracy of this algorithm. He noted that this model might also be useful in other areas15. In this study, 2112 data sets collected from 8 wells were used to predict the underground water level of Khuzestan region in Iran. To predict this important parameter, FF-KNN, ABC-KNN and DL-FF-KNN-ABC-MLP algorithms were used. A characteristic and abilities of this algorithm is high accuracy, high speed and good performance. The results show that the DL-FF-KNN-ABC-MLP algorithm has an accuracy of performance over the other algorithms introduced in this article.
Materials and methods
KNN algorithm
The KNN algorithm is one data mining algorithms that is primarily used in data classification. This algorithm finds k samples of the training data which are closer to the test sample than all the training data and calculates the average output of these k samples and considers them as the estimated final value for the test sample. The requirements of this algorithm include: First, we need to have a set of samples with output or labeled data, second, we need a similarity unit or distance to calculate the distance between two samples, and third, we need to specify a k value to determine the number of neighbors. KNN or WKNN algorithm is the same as KNN, with the difference that for each test sample, each sample from the k set that is obtained, according to how far it is from the test point, a coefficient is placed for that sample to Those that have a greater distance have less effect on the output and closer samples have a greater effect16. First, the distance from the test sample to all training samples is calculated using Eq. (1):
Equation (1) computed the Euclidean distance of all samples from the test sample. Which M; is the number of features or inputs, Xij is the training sample, Xj is the test sample. Then, k minimum values of the obtained values for the vector D is selected for the next step. The output of the test point can be expressed by Eq. (2).
In Eq. (2), the value of C represents the label of the samples or the output value of the samples. This equation is used for KNN, but in WKNN, each coordinate axis is weighted according to its distance from the test data. The value of this weight is derived from Eq. (3):
In Eq. (3), the variable w is the weight for each of the k samples. In the following, the final value is calculated according to the weights using Eq. (4):
Bee algorithm
The bee algorithm was developed in 2005. This algorithm simulates the feeding behavior in bee groups17. Bees can be divided into three categories: foraging bees and foraging bees. A bee that goes to a predetermined food source is called a worker bee, a bee that conducts a random search is called a foraging bee, and a bee that moves in the dance area to decide is called a foraging bee. Choosing a food source that is left over is called a fodder bee.
Firefly algorithm
Fireflies are a kind of cockroaches that emit yellow and cold light in the process of bioluminescence. For various reasons (about which there is a difference of opinion, such as reproduction or creating a defense mechanism), night owls are more likely to move towards a night owl that is brighter than themselves. The distance of night lights from each other, the amount of ambient light absorption, the type of light source, and the amount of light emitted from the source are factors that affect the light received from a source.
The firefly algorithm is an optimization method which finds the optimal solution by simulating the behavior of the firefly18,19,20.
Multilayer perception
Neural networks are intended to create patterns act as a human brain. The neural network works by creating an output pattern based on the input model delivered provided to the network21,22. Neural networks are composed of several processing elements or neurons that receive and process input data and ultimately provide an output from it. Input data may be raw data or the output of other neurons23. The output can be the final product or input for other neurons. An artificial neural network consists of artificial neurons, which are actually processing elements. Each neuron has several inputs and it assigned a weight to each input24,25. The average output of each neuron is obtained from the sum of all inputs multiplied by the weights. The final output is done by applying a transformation function.
Multilayer perception, or MLP, is an architecture of artificial neural networks in which it divided the neurons of the network into several layers26. In these networks, the first layer is the input and the last layer is the output, and the intermediate layers are called hidden layers27. This architecture can be called the most widely used architecture of neural networks.
Hybrid methods
In this paper, it developed a hybrid method. This combined method results from the combination of several methods, such as FF, KNN, ABC, MLP and K-Means. In general, this combined method can be divided into three general parts and also has two phases of training and testing. To increase the prediction accuracy, we used the data of 8 wells and using the K-Means clustering method, we first put the wells that have similar behavior in one group, and then in the next block, using the data of the wells at time t and which group each well is in, the neural network estimates the output of the well for time t + 1.
In the new method, the KNN method is used as the basic method for classification and the FF optimization algorithm is used for find the optimal coefficients control’s parameter for the input data. In addition, MLP was used to estimate the output values, and we used the ABC algorithm for better training. To perform classification, we must use a new output value that we define ourselves. Therefore, we add a new output to the dataset and get its value using the K-Means algorithm. For the classification block, the input data is sent along with the new output. In the second step, when the classes are determined, the data is sent to the second block to estimate the value. In this block, the ABC-MLP combination is used to estimate the value. For this block, the input values are sent along with the new output. The control parameters for the approaches utilized in this article are listed in Table 1. Figure 1 shows the flow chart diagram of the training stage of the new method. The new method is made of two phases, training and testing, and we will first look at the training phase.

General flow chart diagram of the training stage of the new method.
We have to use different data for each of the two phases. Therefore, we considered 70% of the data as training data for the training phase and the remaining 30% as test data for the test section. Based on the 70% of the data that we considered for the training part, we left 30% for validation.
Training stage
First, the data should be normalized, which is done using Eq. (5).
In Eq. (5), variable M is the number of inputs, xil is the lth input of the ith sample. The Max(xl) value is the lth largest input number and Min(xl) is the lth smallest input number. Figure 2 shows the block diagram related to the training stage.

Flow chart diagram of the training stage of the new method.
After data normalizing, we have to add a new entry to the data, which specifies the number of the cluster or class to which each data belongs. We add that input to be used by the classification block and increase the accuracy of the estimate. Determining which class each data belongs it does to by the first block, but since the data is not labeled and not clustered, the number of classes and their data must be determined for this block first. Thus, using the K-Means block, we first determine the optimum number of classes and data for each class. The Davies Bouldin value was used to arrive at the optimum number of classes. The smaller this value is, the more optimal the number of classes is (Table 2).
The smaller the Davies–Bouldin distance for a k, the more suitable the value of k is. Therefore, for the data of these 8 wells, the value is three clusters. Now, we divide all the data into three clusters using the K-Means algorithm and add a new output to each of the data, which stores the data class number and has values of one. It is up to three. In the Fig. 3, you can see the blocking of the wells. Figure 4 shows the well 1 validation. This graph displays the great accuracy of the algorithm’s results. Additionally, demonstrate how this technique may reduce noise in enormous data sets.

The data of 8 different wells which have been converted into three clusters and shown with three colours.

Validation results for well 1.
To create three clusters from the data of eight wells, we added a new column as the class number and assigned values between 1 and 3 based on the K-Means algorithm’s output. This operation only occurred during training, not during testing. The first block used data from outputs 1, 2, and 3 for categorization. To improve accuracy, we considered coefficients for each input using the firefly method to determine their best value. As optimization methods like firefly generate different solutions each time, they run due to a large number of optimal solutions, we obtained four weights with values of 0.1542987, 0.9254255, 0.4256712, and 0.6732144 from the algorithm's best answers for the four inputs. All inputs have an equal impact on output but may have different coefficients depending on their impact on output value.
Error parameters
Equations (6) to (12) are given to determine the statistical comparing error of these algorithms. Based on the results presented in the results section and using these equations, we can compare the algorithms’ performance accuracy.
Study area
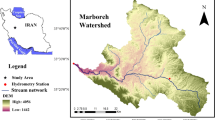
The area under investigation is situated within the longitude range of 388,000 to 400,000 and the latitude range of 3,496,000 to 3,508,000. This region is located in the folded Zagros geological division of Iran and comprises anticlines and transects that vary in width, length, and height. The general orientation of this area is roughly northwest-southeast. The geological formations present in this region consist of rock units from the second and third ages as well as Quaternary sediments. The oldest rocks in this area are the thin limestones found in the Ilam-Soruk layer, followed by Pabdeh and Gurpi marl formations, Asmari limestone formations, chalk and marl layers from the Gachsaran formation, Bakhtiari conglomerate, and alluvial sediments arranged chronologically. The area being studied has two types of aquifers, alluvial and karst, from a hydrogeological perspective. The alluvial aquifer is located in the upper part of the Qalehtol plain and either reaches an impermeable bedrock or transforms into a karst aquifer at deeper levels. The karst aquifer is formed in the Asmari formation limestone and is limited by the impermeable Pabde formation below. There is no Gachsaran Formation outcrop on the northeastern side of the belt-long anticline, but on the southwestern side, it covers some areas of the Asmari Formation. Three limestone wells drilled by Khuzestan Water and Electricity Organization around the northwestern tip of Kamerdaraz anticline indicate a karst aquifer with high transfer and storage capabilities. The Asmari formation sinks under Barangerd plain from southeast to Qalehtol plain until it re-emerges in Haft Cheshme mountain north of Qalehtol. Two limestone wells with irrigation are also present in southeast Qalehtol plain. The northeastern edge of the anticline rises in Barangerd plain and finds a reversed state of syncline, while suspended sediment is enclosed on both sides by Pabdeh Formation, and in Tang Kurd, limestone outcrop represents termination of the aquifer.
Data base
The underground water level, which determines the level of fresh underground water and is used for drinking water and other applications including agriculture, etc., depends on various parameters such as the underground water level (for the previous three consecutive years), rainfall It depends on rain, river discharge and harvest discharge.
In order to predict the underground water level, it collected 2112 data points using artificial intelligence hybrid algorithms from information related to 8 wells in an area of Khuzestan province (Qale-Tol area). This information includes the flow rate of the river entrance (feeding fresh water resources), underground water level, rainfall and underground water withdrawal by examining different time delays, as well as the level of underground water during the years 1992 to 2013. Is the important point in these data is that to determine the output (determining the underground water level for time t), the information of the input parameters related to time t, t-1 and t-2 has been used.
The statistical parameters related to 8 wells are reported in Table 3 for the groundwater level (m), rainfall (mm), river rate (m3/s) and discharge rate (m3/s), respectively, for the information related to 8 wells from 1992 to 2013. Based on this model, it is possible to determine the parameters of the underground water level as a function of the parameters of the underground water level (for the previous three consecutive years), rainfall, river discharge and harvest discharge (Eq. 13);
In this equation, Q = groundwater level, R = rainfall, P = river rate and O = discharge rate.
The method used to describe input and output data in scientific articles is the use of cumulative distribution functions. It also used this method in this article to describe the data. It described information about the distribution of 2112 data points:
Figure 5 shows information about normal distribution functions for predicting the groundwater level. The value of cumulative distribution function for groundwater level (Q) as 140 is approximately 16% and for 16 < Q < 154 it is approximately 45% and for the rest of the data this value is approximately 39% for Q > 154. For rainfall (R) as 12, it is approximately 56%, and for 12 < R < 14, it is approximately 6%, and for the rest of the data, this value of R > 14 is approximately 38%. For river rate (P) as 2852, it is approximately 48%, and for 2852 < P < 3207, it is approximately 46%, and for the rest of the data, this value of P > 3207 is approximately 6%. For discharge rate (O) as 5115, it is approximately 10%, and for 5115 < O < 5476, it is approximately 41%, and for the rest of the data, this value of O > 5476 is approximately 49%. As it is clear in Fig. 5, the data related to river discharge and harvest discharge have a normal distribution, and the data related to rainfall and underground water level are non-normally distributed.

Cumulative distribution function diagram for the variables of groundwater level, rainfall, river rate and discharge rate.
Result and discussion
As mentioned before, the aim is to predict the underground water level from 2112 data points and using artificial intelligence hybrid algorithms from the information related to 8 wells in one region of Khuzestan province. The recombinant hybrid artificial intelligence algorithms used are FF-KNN, ABC-KNN and DL-FF-KNN-ABC-MLP algorithms. To develop algorithms and test them, we used well information from wells 1–5, and for their development, we used well information from wells 6–8. In order to developed these algorithms, 70% of the data related to 5 wells (wells 1–5) was used as training and 30% of this data was used as testing (in order to make a proper comparison between the algorithms, a similar train and test sub set have been used).
And also, in order to check information related to artificial intelligence algorithms, error statistical parameters have been used, and with this statistical metric, it can make a correct comparison between the algorithms used in this thesis in order to predict the underground water level. The results related to training, testing and the total data used (well data 1–5) to determine this valuable index are reported in Tables 4, 5 and 6, respectively (based on Eqs. (6) to (12)).
The results presented for different algorithms for test data, training and the whole data set are given in Tables 4, 5 and 6. One aim of this treatise is to compare and present new algorithms of FF-KNN, ABC-KNN and DL-FF-KNN-ABC-MLP algorithms for predicting the underground water level. According to the results presented in the table reports, the performance accuracy of DL-FF-KNN-ABC-MLP for predicting this key parameter is very high. According to the reports shown in Tables 4, 5 and 6, it is RMSETrain = 0.0451, RMSETest = 0.0597 and RMSETotal = 0.0701. Moreover, on the basis of the results presented and the comparison between STD, a good comparison of the performance accuracy of the algorithms can be made. In other words, the comparison for this term shows that the accuracy of the algorithms for predicting underground water level is ABC-KNN < FF-KNN < DL-FF-KNN-ABC-MLP.
Figures 6, 7 and 8 show the cross-plots for the groundwater level to check the predicted data against the measured data, respectively, for the data related to training, testing and the entire data set. One of the important and practical statistical errors which can determine the algorithm performance is the use of the R-square statistical error. With these data, you can understand the accuracy of the functions and also check the data using graphical diagram. As shown in this figure, the R-square value for the DL-FF-KNN-ABC-MLP algorithm has the highest performance accuracy. Based on Figs. 6, 7 and 8, using the cross line, the performance accuracy of the predicted points against the measured points can be measured by using the distance of these points with the cross line. Based on Figs. 6, 7 and 8 which show training, testing, and total, it is clear that the distance of points with the cross line for hybrid models is ABC-KNN > FF-KNN > DL-FF-KNN-ABC-MLP.

Cross-plot for groundwater level prediction for training data related to information related to wells 1–5 (70% of this data set).

Cross diagram for groundwater level prediction for test data related to information related to wells 1–5 (30% of this data set).

Cross-plot for predicting the groundwater level for the entire data set related to the information related to wells 1–5 (100% of this data set).
Development of the new model
This section of the article discusses the development and comparison of various models, including ABC-KNN, FF-KNN, and DL-FF-KNN-ABC-MLP (shown in supplementary file), for predicting groundwater levels in different wells in the same field. The study used information related to wells 6, 7, and 8 and first tested the models on wells 1–5, followed by checking the models on the remaining wells. Figure 9 provides a comparison of groundwater level predictions by year for wells 5 to 8 for the algorithms. The results show that the DL-FF-KNN-ABC-MLP algorithm outperformed the other algorithms in terms of performance accuracy for predicting groundwater levels in new wells in the same field. The study suggests that this algorithm could also be used in other fields and for predicting other key factors. The use of new information highlights the potential for this algorithm to be applied in various scenarios, and future researchers are encouraged to explore its application in other fields.

Comparison for groundwater level prediction for the entire data set for wells 6, 7 and 8 based on ABC-KNN, FF-KNN and DL-FF-KNN-ABC-MLP.
Conclusion
In this study, 2112 data sets collected from 8 wells were used to predict the underground water level of Khuzestan region in Iran (Qale-Tol area). In order of prediction this parameter, three new artificial intelligence hybrid algorithms FF-KNN, ABC-KNN and new developed hybrid DL-FF-KNN-ABC-MLP algorithm have been used. Variable data which used as input data for hybrid machine learning, includes the flow rate of the river (which feeds fresh water sources), the level of underground water, precipitation and withdrawal of underground water by examining the delay of different times and also the level of underground water level during the years are 1992 to 2013. In order to developed these algorithms, 70% of the data related to 5 wells (wells 1–5) was used as training and 30% of this data was used as testing. The results show that the performance accuracy of the DL-FF-KNN-ABC-MLP algorithm is better than the other two algorithms used in this article. The novelty of this technique is that it first does classification by presenting the first block (combination of FF-DWKNN algorithm) and predicts with the second block (combination of ABC-MLP algorithm). The algorithm's ability to decrease data noise will be enabled by this feature. The results shown for this algorithm for the data related to testing, training and the entire data set are RMSETrain = 0.0451, RMSETest = 0.0597 and RMSETotal = 0.0701. It is suggested that other scientists use this modified algorithm to determine important parameters in the prediction of other hydrological parameters. In addition, it is suggested that scientists use the term reservoir temperature and soil moisture effect to predict groundwater levels. Also, researchers can use this algorithm for big data with high noise.
Data availability
Based on the correct academic requirement, corresponding author will let to available to dataset.
References
Gleeson, T. et al. The global volume and distribution of modern groundwater. Nat. Geosci. 9(2), 161–167 (2016).
Liu, F. et al. The role of anthropogenic and natural factors in shaping the geochemical evolution of groundwater in the Subei Lake basin, Ordos energy base, Northwestern China. Sci. Total Environ. 538, 327–340 (2015).
Foster, S. Groundwater Resources and Irrigated Agriculture: Making a Beneficial Relation More Sustainable (International Water Management Institute, 2012).
Konikow, L. F. & Kendy, E. Groundwater depletion: A global problem. Hydrogeol. J. 13, 317–320 (2005).
Salih, A. Contribution of UNESCO-international hydrological programme to water resources management in the Arabian gulf countries. In Developments in Water Science (ed. Salih, A.) 129–139 (Elsevier, 2003).
Basahi, J. M., Masoud, M. H. Z. & Rajmohan, N. Effect of flash flood on trace metal pollution in the groundwater-Wadi Baysh Basin, western Saudi Arabia. J. Afr. Earth Sci. 147, 338–351 (2018).
Don, N. C. et al. Groundwater resources management under environmental constraints in Shiroishi of Saga plain, Japan. Environ. Geol. 49, 601–609 (2006).
Don, N. C. et al. Simulation of groundwater flow and environmental effects resulting from pumping. Environ. Geol. 47, 361–374 (2005).
Nsubuga, F. W. N. et al. The nature of rainfall in the main drainage sub-basins of Uganda. Hydrol. Sci. J. 59(2), 278–299 (2014).
Shi, H. et al. Spatial and temporal characteristics of precipitation over the Three-River Headwaters region during 1961–2014. J. Hydrol. Reg. Stud. 6, 52–65 (2016).
Kumar, D. et al. Predicting groundwater depth fluctuations using deep learning, extreme learning machine and Gaussian process: A comparative study. Earth Sci. Inf. 13(4), 1237–1250 (2020).
Sahu, R. K. et al. Impact of input feature selection on groundwater level prediction from a multi-layer perceptron neural network. Front. Water 2, 573034 (2020).
Emamgholizadeh, S. & Mohammadi, B. New hybrid nature-based algorithm to integration support vector machine for prediction of soil cation exchange capacity. Soft. Comput. 25(21), 13451–13464 (2021).
Vadiati, M. et al. Application of artificial intelligence models for prediction of groundwater level fluctuations: Case study (Tehran-Karaj alluvial aquifer). Environ. Monit. Assess. 194(9), 1–21 (2022).
Mohammadi, B. Modeling various drought time scales via a merged artificial neural network with a firefly algorithm. Hydrology 10(3), 58 (2023).
Li, D., Zhang, B. & Li, C. A feature-scaling-based k-nearest neighbor algorithm for indoor positioning systems. IEEE Internet Things J. 3(4), 590–597 (2015).
Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization. Technical Report-tr06 (Erciyes University, Engineering Faculty, Computer, 2005).
Yang, X.-S. & He, X. Firefly algorithm: Recent advances and applications. Preprint at http://arXiv.org/1308.3898 (2013).
Yang, X.-S. Firefly Algorithms for Multimodal Optimization (Springer, 2009).
Pal, S. K., Rai, C. S. & Singh, A. P. Comparative study of firefly algorithm and particle swarm optimization for noisy non-linear optimization problems. Int. J. Intell. Syst. Appl. 4(10), 50 (2012).
AlBataineh, A. & Manacek, S. MLP-PSO hybrid algorithm for heart disease prediction. J. Person. Med. 12(8), 1208 (2022).
Rajabi, M., Ghorbani, H. & Aghdam, K.-Y. Prediction of shear wave velocity by extreme learning machine technique from well log data. J. Pet. Geomech. 4(3), 35–49 (2022).
Kopal, I. et al. A generalized regression neural network model for predicting the curing characteristics of carbon black-filled rubber blends. Polymers 14(4), 653 (2022).
Tadros, T. et al. Sleep-like unsupervised replay reduces catastrophic forgetting in artificial neural networks. Nat. Commun. 13(1), 7742 (2022).
Tabasi, S. et al. Optimized machine learning models for natural fractures prediction using conventional well logs. Fuel 326, 124952 (2022).
Jafarizadeh, F. et al. Data driven models to predict pore pressure using drilling and petrophysical data. Energy Rep. 8, 6551–6562 (2022).
Beheshtian, S. et al. Robust computational approach to determine the safe mud weight window using well-log data from a large gas reservoir. Mar. Pet. Geol. 142, 105772 (2022).
Acknowledgements
The authors would like to thank anonymous reviewers for the valuable comments to improve the quality of our paper. Also, the authors thank Mr. Zargar for helping to collect data for this article.
Author information
Authors and Affiliations
Contributions
Conceptualization, H.E. and M.R.; methodology, H.E. and M.R.; software, H.E. and M.R.; validation, H.E. and M.R.; formal analysis, H.E. and M.R.; investigation, H.E. and M.R.; resources, H.E. and M.R.; data curation, H.E. and M.R.; writing—original draft preparation, H.E. and M.R.; writing—review and editing, H.E. and M.R.; visualization, H.E. and M.R.; supervision, H.E. and M.R.; project administration, H.E. and M.R.; funding acquisition, H.E. and M.R.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Rahimi, M., Ebrahimi, H. Data driven of underground water level using artificial intelligence hybrid algorithms. Sci Rep 13, 10359 (2023). https://doi.org/10.1038/s41598-023-35255-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-35255-9
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
