
Abstract
Pointing at a screen using wrist and forearm movements is a kinematically redundant task, and the Central Nervous System seems to manage this redundancy by using a simplifying strategy, named Donders’ Law for the wrist. In this work we investigated (1) whether this simplifying approach is stable over time and (2) whether a visuomotor perturbation provided in the task space influences the strategy used to solve the redundancy problem. We conducted two experiments asking participants to perform the same pointing task in four different days (first experiment), and providing a visual perturbation, i.e. a visuomotor rotation to the controlled cursor (second experiment), while recording their wrist and forearm rotations. Results showed that the participant-specific wrist redundancy management (described by the Donders’ surfaces) (1) neither changes over time (2) nor varies when a visuomotor perturbation is provided in the task space.
Similar content being viewed by others

Introduction
During everyday tasks, the Central Nervous System (CNS) faces motor redundancy while controlling voluntary movements1,2,3,4. A common example is controlling wrist and forearm rotations during pointing tasks. In fact, while this task requires to control only two degrees of freedom (DoFs), the CNS controls three DoFs, namely wrist flexion/extension (FE), radial/ulnar deviation (RUD) and forearm pronation/supination (PS)5. Previous studies have shown that the brain seems to manage the redundancy during pointing with the wrist by implementing a neural constraint, named Donders’ Law for the wrist for similarity to the empirical law originally described for eye movements by Donders in 18476. In other words, the Donders’ Law poses that the three wrist and forearm rotations are constrained to lie on a two-dimensional surface, named Donders’ surface, which has been found to be participant specific and volatile5,7,8,9,10. The adjective volatile refers to the contingency that Donders’ Law can be violated and therefore considered as a “soft” constraint imposed by the brain, rather than a physical constraint due to a bio-mechanical characteristic of the wrist. Indeed, violations to Donders’ Law have been reported when participants were asked to perform pointing tasks attached to a wrist robot, which caused the Donders’ Surfaces to disappear7. Moreover, violations to Donders’ Law have been reported also for unconstrained movement of the human arm11,12,13 or for the eye when participants were instructed to move as fast as possible14.
However, some aspects of the Donders’ Law for the wrist still need to be further investigated. In fact, little is known about its stability over time (i.e. whether Donders’ Surfaces change over time within participants), and in response to external perturbations, such as visuomotor rotations in the task space during pointing tasks. As regards the stability of the redundancy management, it has been demonstrated that for arm movements aimed at pointing or grasping targets within a typical arm workspace, the final configuration of the arm does not depend on the starting position15. On the other hand, a preliminary study showed that visuomotor perturbation, provided to the controlled cursor, seems not to affect the specific implementation of the Donders’ Law9. Nevertheless, this work9 has some limitation in terms of protocol design, number of participants enrolled, and analysis, and no further studies about this topic have been carried out after.
In this work, we specifically study the stability of the Donders’ Law by using an interactive clock-like video-game where participants are asked to point at targets on a screen using only the wrist and forearm rotations.
In particular, two different experiments (described respectively in “Assessing Donders’ law stability over time“ and “Assessing Donders’ law during motor adaptation“) have been conducted on two groups of participants: (1) the first one focused on the stability over time of the (Donders’ Law) for the wrist, testing whether it changes within participants over four different days; (2) the second experiment aimed at studying the Donders’ Law for the wrist in presence of a visuomotor perturbation during the pointing tasks. To this aim, we analyzed in each experiment the following parameters: (1) the task-space accuracy in performing the pointing movements in terms of deviation from an ideal straight path connecting the staring position and the target one; (2) the reliability of the estimated Donders’ Surfaces in terms of their thickness5 and (3) the participant-specific implementation of the Donders’ Law during the tasks in terms of Shape Index of the estimated Donders’ Surfaces8.
Results
Assessing Donders’ law stability over time
Figure 1A,B shows the \(A_{sum}\) and thickness values averaged along trials and participants in the four different days. All Thickness values are below 3\(^{\circ }\), congruently with previous studies8. Although both indices significantly vary over days (\(A_{sum}\): p = 0.04, F = 4.49; thickness: p = 0.03, F = 3.24), post-hoc analysis reveals significant differences only between Day 1 and Day 3 (\(A_{sum}\): p = 0.01, t = 3.4; Thickness: p = 0.03, t = 3.07). We also found a significant correlation (Spearman’s correlation \(\rho\) = 0.62, p = 3.82 \(\times 10^{-6}\), see Fig. 1D) between such parameters, as suggested by their similar behaviors over sessions. We implemented the correlation considering all trials (except for the outliers).

(A) Average Task-Space Accuracy \(A_{sum}\) (along trials and participants) over the 4 days; (B) average Thickness (along trials and participants) over the 4 days, neglecting the discarded outliers; (C) Shape Index averaged along trials and participants over the 4 days, neglecting outliers; (D) correlation between Thickness and Task-Space Accuracy. Pearson’s \(R = 0.62\) with a \(p = 3.8 \times 10^{-6}\). Within box-plots (A–C), red crosses represent the data labelled as outliers by the MATLAB™ function boxplot, net of neglected outliers on the basis of Thickness analysis.
Shape index (tested with a 1-way ANOVA considering participants as independent factor) showed significantly different values along participants (p = 1.15 \(\times 10^{-54}\), K = 281.68), confirming that the peculiar shape of the Donders’ surface is participant-specific, according to previous studies on this topic7,8,9. On the other hand, as depicted in Fig. 1C), the RM-ANOVA revealed that Shape Index did not change within participants over days (p = 0.74, F = 0.28, Greenhouse–Geisser sphericity correction method was used).
Assessing Donders’ law during motor adaptation
Figure 2 shows the pointing trajectories over sessions for a representative participant, while the associated Donders’ surfaces are reported in Fig. 3.

Pointing trajectories for a representative participant, showing baseline, adaptation (divided into early trials 1 \(\div\) 10, middle trials 11 \(\div\) 25 and late trials 26 \(\div\) 40) and washout (divided into early, middle and late trials). Blue dots represent movements from center to peripheral targets, while grey circles represent the targets that the participants are asked to point. Noteworthy, the trajectories depicted for the adaptation phases are rotated according to the provided visuomotor perturbation, i.e. 30\(^{\circ }\) CCW rotation, in order to represent the participant perspective during the task execution.

Donders’ surfaces for a representative participant, showing baseline, adaptation (divided into early trials 1 \(\div\) 10, middle trials 11 \(\div\) 25—and late trials 26 \(\div\) 40) and washout (divided into early, middle and late trials). Red dots represent recorded wrist rotations.
All the parameters described in “Data analysis“ were found to be normally distributed, thus we used RM-ANOVA and t-test (for implementing post-hoc analysis) in all cases except for \(\tau _{sum}\) (adaptation time), for which we employed the Wilcoxon Signed-Rank test. Corrections in post-hoc tests were implemented using the Bonferroni correction.

Behaviour of \(A_{sum}\) and \(A_{net}\) over trial. Moreover, the exponential fitting curve is superimposed on \(A_{sum}\) data.

Thickness averaged along participants over trials.

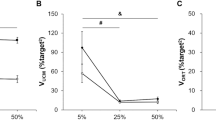
(A–D) Performance parameters averaged along trials and participants in baseline, adaptation and washout phases. (A) \(A_{sum}\); (B) \(A_{net}\); (C) thickness; (D) Shape Index; (E) correlation between thickness and \(A_{sum}\). (F) Adaptation time \(\tau _{sum}\) averaged along trials and participants in adaptation and washout phases.
The results related to \(A_{sum}\) and \(A_{net}\) averaged for all participants and over trials are reported in Fig. 4. Both in adaptation and washout phases, \(A_{sum}\) and \(A_{net}\) exhibits a sudden variation in the first trials with respect to the end of the previous one, where they both settle with training. While \(A_{sum}\), which is the absolute error and therefore always positive, increases at the beginning of both adaptation and washout phases, \(A_{net}\) shows a variation with opposite signs at the beginning of the adaptation and washout phases, indicating that participants deviate in opposite directions when the visuomotor rotation is introduced and then removed.
As visible from Fig. 6A,B, both \(A_{sum}\) and \(A_{net}\) statistically vary over sessions (\(A_{sum}\): p = 1.89 \(\times 10^{-7}\), F = 41.27; \(A_{net}\): p = 9.17 \(\times 10^{-13}\), F = 186.78, Greenhouse–Geisser sphericity correction was implemented). Post-hoc tests reveal that the absolute deviation from the straight line (\(A_{sum}\)) is significantly higher during Adaptation than during Washout (p = 1.70 \(\times 10^{-4}\), t = 5.04). In both phases it is higher than Baseline values (baseline vs adaptation p = 1.18 \(\times 10^{-7}\), t = − 9.06; baseline vs washout p = 7.93 \(\times 10^{-4}\), t = − 4.02). Similar results were found for \(A_{net}\) (baseline vs adaptation p = 2.49 \(\times 10^{-8}\), t = − 10.05; baseline vs washout p = 8.42 \(\times 10^{-8}\), t = 9.27; adaptation vs washout p = 5.23 \(\times 10^{-13}\), t = 19.32), where the washout phase shows negative values, highlighting the presence of aftereffects of the adaptation to visuomotor rotation, i.e. a deviation in the opposite direction with respect to the adaptation phase when the perturbation is removed.
As regards the Thickness, according to the behaviour over trials depicted in Fig. 5 and the boxplots of Fig. 6C, it ranges from 0.48\(^{\circ }\) to 1.27\(^{\circ }\) in Baseline, from 0.56\(^{\circ }\) to 2.31\(^{\circ }\) in Adaptation and from 0.63\(^{\circ }\) to 2.13\(^{\circ }\) in Washout, congruently with previous studies5,9,10 and the results obtained in the first experiment (see “Assessing Donders’ law stability over time"). Moreover, Thickness significantly differs over sessions within participants (p = 5.35 \(\times 10^{-5}\), F = 7.09) and post-hoc tests revealed a significant increase with respect to the Baseline both in Adaptation (p = 0.01, t = − 3.20) and in Washout (p = 0.01, t = − 3.32) phases. Conversely, no statistically significant difference was found between Adaptation and Washout.
Similarly to the data analysis presented in “Assessing Donders’ law stability over time“, we found a significant correlation between \(A_{sum}\) and Thickness (p = 0.03, \(\rho\) = 0.4, see Fig. 6E). In this case values were averaged along trials of each session, and all data from all participants were grouped, to run the correlation by using the Spearman’s technique.
The number of trial outliers discarded in all participants for each session are reported in Table 2.
As regards the Shape Index, also in this experiment, it was found to be significantly different over the participants (p < 0.0001, Z = 565.12 by using a Kruskal–Wallis test), while no statistical difference has been found over the sessions (p = 0.12, F = 2.75, Greenhouse–Geisser sphericity correction method was applied).
Finally, the adaptation time \(\tau _{sum}\), expressed as number of trials (see Fig. 6F), is significantly higher in the adaptation phase than in the washout (p = 5.86 \(\times 10^{-3}\), W = 53), showing that the adaptation phase to a visuomotor perturbation takes longer than re-adapting to the baseline condition. In Fig. 4, the exponential fitting of the average \(A_{sum}\) is also reported, superimposed to the recorded data.
Discussion
Stability over time
The decreasing trend of \(A_{sum}\) over days may suggest a learning effect, despite the task involves the management of the wrist redundancy. A similar reduction over days of the Thickness suggested a possible correlation between the two parameters, confirmed by the significant Spearman’s correlation coefficient equal to 0.62. This indicates that the more participants learn the task, the better they implement the redundancy solution. Indeed, reducing the error in the task space and improving the management of the redundancy (in terms thickness of Donders surfaces) may compete in an iterative and concurrent way in the wrist coordination: the more the participants become confident with the task, the higher the accuracy in managing the redundancy. Such evidences are in line with the most popular theories of human motor control, in which the motor output is the result of a cooperative and iterative process for optimizing all factors involved, i.e. the accuracy in performing the task and the management of redundancy16,17,18.
Concerning the implemented strategy, i.e. the participant-specific shape of Donders surface, we verified that it depends on the single participant, thus denoting a personal motor style. In addition, we found it to be stable over time, since no statistical differences have been found over days. Such results confirmed that the Donders’ Law, expressed through the Shape Index, could be considered as a personal motor sign and a reliable parameterization to model the participant’s specific implementation of the redundancy problem5.
Motor adaptation
The analysis carried out on the task space accuracy (i.e. \(A_{sum}\) and \(A_{net}\)), revealed that despite the task involves the management of the kinematic redundancy, motor learning does occur. Indeed, (see Figs. 4, 6) when the visuomotor perturbation is provided (and when removed), during the first trials participants show a sudden decrease of their performance in terms of path error. However, training over several trials allows participants to learn a new internal model, leading to an improvement of their performance. Moreover, results show that participants take longer to learn a new internal model, i.e. pointing with a visuomotor perturbation, than re-adapting to the baseline condition. Indeed, the estimated adaptation time related to the adaptation session is significantly higher than the one related to the washout (see Fig. 6).
Nevertheless, when considering the wrist redundancy management, the participant-specific shape of Donders’ surfaces is preserved during both the adaptation and washout phases, even if the thickness is slightly increased with respect to baseline values. Anyway, it remains in all cases below 3\(^{\circ }\), which is a threshold largely consistent with previous studies9 and with the results obtained from our first experiment (see “Assessing Donders’ law stability over time“).
Such results confirm that even though the task requires a management of the wrist redundancy, motor learning still occurs similarly to classical and widely studied problems of adapting to a constant perturbation19,20,21 and confirming the preliminary findings presented in9.
However, the result that, during both Adaptation and Washout phases, the Thickness is higher than the Baseline (see Fig. 6), suggests that the presence of the visuomotor perturbation influences how precisely participants implement the Donders’ Law. A possible explanation may underlie in the hierarchical processes that occur during motor learning22,23,24: learning how to adapt to a perturbation in the task space may have a higher priority than managing the redundancy. Specifically, when participants face with a task which they have to adapt, the brain might be more focused in reducing task space error rather than optimally managing the redundancy problem.
On the other side, the stability of the Shape Index over sessions suggests that the specific policy used by each participant to combine wrist DoFs for solving the redundancy does not change when participants have to adapt to a task-space visuomotor perturbation. Although the redundancy solution is less precise (given the increase of thickness values), the participant-specific policy used to control the wrist in a kinematically redundant task is not disrupted, confirming preliminary results from9. Thus, the Shape Index, being personal and stable over days and in presence of visuomotor perturbations, may be denoted as a suitable parameter for describing how the control policy is implemented in each participant during redundant pointing tasks with the wrist.
Although the redundancy management can be considered as a soft constraint, i.e. it is not due to any physical constraint since it can be violated in some conditions7,10, it could be strictly correlated to the participant specific muscle-skeletal conformation and thus to participant specific bio-mechanics9,25. In other words, due to participant specific bio-mechanics (e.g. wrist impedance), the observed behaviour might be attributed to a side effect of a control strategy applied to FE and RUD25. Therefore, Shape Index can be ultimately defined as a participant-specific motor sign and eventually used as bio-marker for neurological diseases that involve neuro-muscular or muscle-skeletal disorders, such as Parkinson’s Disease26 or job-related disorders27. Future works will target to specific studies on participants with these diseases in order to further investigate this aspect.
Conclusions
In this work we studied the stability of the wrist redundancy management during pointing tasks focusing on two different aspects: (1) whether the Donders’ Law is stable over days for a single individual (see “Assessing Donders’ law stability over time“) and (2) whether it is influenced by a visuomotor perturbation provided in the task space (see “Assessing Donders’ law stability over time“). We enrolled two groups of participants and we studied the two scientific questions separately. We found a significant correlation between the accuracy in the task space (\(A_{sum}\)) and and the accuracy in implementing the Donders’ Law (Thickness), suggesting an iterative and concurrent influence of the task performance and redundancy management in the wrist coordination.
Mainly, we found that the Shape Index, that defines the peculiar shape of the Donders’ Surface (i.e. the geometrical representation of the Donders’ Law) is significantly consistent for each participant over days. This finding suggests that Donders’ Law can be considered as a reliable model to describe redundancy control policy.
On the other hand, we also demonstrated that redundancy solution policy persists even when participants have to adapt to a visuomotor perturbation and the participant-specific control policy implemented, characterized by the Shape Index, does not change across sessions during both adaptation and washout phases.
Such results suggest that Shape Index may be also used as bio-marker for neuromuscular or muscle-skeletal disorders. To this aim, future works should investigate wrist redundancy management during pointing tasks in participants affected neuro-muscular diseased, such as Parkinson’s Disease, in order to define novel protocols for assessing the motor symptoms of the pathology and optimizing its treatment28,29. In addition, we will also test pointing tasks with the wrist during non-invasive neuromodulation procedures, e.g. transcranial Direct Current Stimulation (tDCS)30 or robot-aided Transcranial Magnetic Stimulation (TMS)31, in order to investigate which are the brain areas mainly involved in managing the redundancy solution of the wrist.
Materials and methods
Experimental setup
Participants were seated in front of a monitor, with the arm fixed on a support and straps used to minimize torso, shoulder and elbow movements, so that only wrist rotations and forearm pronation-supination were left unconstrained. Wrist rotations were measured with a Magneto-Inertial Measurement Unit (M-IMU, MTw Awinda by XSens Inc.) mounted on top of an ergonomic hand-held device, which provides rotation matrices of the handle with respect to an external reference frame. The M-IMU, wirelessly connected to a laptop, was configured to continuously record the sequence of rotation matrices (\(\varvec{R}_i\) related to the i-th samples) with a sampling rate equal to 100 Hz. Before starting, the wrist was oriented in its neutral configuration, hereinafter denoted as zero position32, which was used as fixed reference frame for evaluating relative rotations while performing the pointing task5,9. The complete setup is represented in Fig. 7A.

(A) Overview of the experimental setup. For details on wrist kinematics refer to8. The blue reference frame “0”, centered in the wrist center of rotation, refers to the neutral position of the wrist-zero position- and corresponds to the initial position; the red reference frame represents the current wrist orientation recorded by the M-IMU. (B) Scheme of the clock-like game with the 2D projection of the pointing vector n onto the screen reference frame \(\{y_s, \, z_s\}\).
Pointing task
Pointing tasks were implemented through an interactive MATLABTM-based video-game, in which participants could see the pointed target in real-time and control the cursor position with wrist rotations. For a generic orientation of the hand expressed by the rotation matrix \(\varvec{R}_i\), the pointing vector (\(\varvec{n}\)) can be computed as follows:
During the task, the i-th pointing position (second and third components of \(\varvec{n}_i\)) projected onto the monitor plane was evaluated in real-time and provided to the user as visual feedback (see Fig. 7B).
Participants were instructed to move the cursor on the screen towards eight randomly highlighted peripheral targets. The position of the targets was designed such that participants are required to rotate the wrist of 15\(^{\circ }\) to hit them, corresponding to a linear distance travelled by the cursor of about 10 cm. Distance between the monitor and the center of rotation of the wrist (point 0, see Fig. 7) was the same for all participants. Participants have a 2 s timeout to reach a peripheral target, and as soon as it is reached, the central target is highlighted so that Participants can move back into the initial configuration (without any timeout). Once the central target is then reached, the next peripheral target is highlighted and the trial goes on until its completion. In addition, a target is considered reached if the distance between the current position of the cursor and the target itself is smaller than 0.03 rad. To inform the participants, the reached target is unlighted. A single trial is completed once the participants reached all eight peripheral targets.
Experimental protocols
We conducted two experiments on two different groups of participants, to separately assess the Donders’ Law in terms of stability over time and in presence of visuomotor perturbation. The two experimental protocols are described in the following sections, together with the statistical analysis used for the two datasets. We used the software JASP33 to perform all statistical tests and we selected the significance threshold equal to 0.05 in all cases. Both studies were approved by the Ethics Committee of Universita’ Campus Bio-Medico di Roma (EMBODY protocol) and carried out in accordance with the Declaration of Helsinki and following amendments. All participants gave written informed consent before the experiments. Right handedness for all participants was verified by means of an Oldfield test34 (considering a score higher than +5), which has been administered to the participants before starting the experiments.
Assessing Donders’ law stability over time
Participants were asked to complete a series of pointing tasks with their right wrist in four different days, at least 1 week apart. In each session day, participants performed 30 trials: first 10 trials were used to let the participants familiarize with the system and thus were not included in the statistical analysis.
Participants
Twelve right-handed healthy volunteers (4 male and 8 female, aged between 21 and 34 years old), with neither history of neuromuscular disorders nor previous wrist injuries, participated to the experiment.
Assessing Donders’ law during motor adaptation
Participants were asked to perform the pointing task in a single session, divided into four phases:
-
1.
Familiarization: 5 trials used to let the participants become confident with the proposed setup and not considered in data analysis;
-
2.
Baseline: 20 trials, considered as basis values for each participant;
-
3.
Adaptation: 40 trials, in which a visuomotor perturbation is presented as a 30\(^{\circ }\) counter clockwise (CCW) visual rotation of the controlled cursor (i.e. the position pointed by the participants is displayed as rotated of 30\(^{\circ }\) with respect to the real one);
-
4.
Washout: 40 trials, in which the visuomotor perturbation is removed.
Participants
Ten right-handed volunteers (4 male and 6 female, aged between 19 and 30 years old) with neither history of neuromuscular disorders nor previous wrist injuries, completed the experiment. It is worth noting that the group of enrolled participants for this experiment is different from the one tested in “Assessing Donders’ law stability over time“.
Data analysis
Given the i-th hand orientation (\(\varvec{R}_i\)) retrieved by the M-IMU, it is possible to determine the wrist axis and amount of rotation by using the rotation vector (\(\varvec{r}_i\)) as follows5,7,8,9:
Despite pointing at virtual targets is a 2-dimensional task, the rotation vector belongs to 3-dimensional space. Previous studies demonstrated that \(r_{ix}\), \(r_{iy}\) and \(r_{iz}\) lie on a 2-dimensional surface embedded in the 3D space of general rotations, named Donders’ Surface5,9,10, which can be estimated by means of a least-squares approximation (implemented using the MATLAB function “nlinfit”) according to the following model:
where \(C_1\)–\(C_6\) denote the coefficients computed by fitting procedure. Further details can be found in7.
In order to assess the task performance and the stability of the Donders’ Law both over time and in presence of visuomotor perturbation, we calculated the following parameters:
-
1.
\(A_{sum}\)–\(A_{net}\): path deviation from a straight line connecting the starting position to a peripheral target for each movement9,35, declined as absolute error (\(A_{sum}\)) and relative deviation to the left or the right of the straight path (\(A_{net}\))35. Such indices quantify the task performance in terms of error with respect to the straight path. Further details about \(A_{sum}\) and \(A_{net}\) derivation can be found in35.
-
2.
Thickness: the standard deviation of the error between the fitted surface and measured first component of the rotation vector (\(r_{ix}\)). Thickness values denote how well the participants implement the Donders’ Law: the lower the thickness, the better the Donders’ surface predicts the recorded data.
-
3.
Shape Index: being the Donders’ Law geometrically represented by a 3D surface, the Shape Index characterizes the specific shape of the Donders’ surface, thus representing the personal motor style of each participant in implementing the redundancy solution. It is defined as follows8:
$$\begin{aligned} Shape \ Index = \frac{2}{\pi }atan2(H,\sqrt{H^2 - K}) \end{aligned}$$(4)denoting H and K the Mean Curvature and the Gaussian Curvature of the Donders’ surface respectively8,36. Further details can be found in8.
-
4.
Adaptation Time (\(\tau _{sum}\)): the time required for the participant to adapt to the visuomotor rotation (or to its removal during the washout phase), computed by fitting \(A_{sum}\) over trials with an exponential curve as \(A_{sum}[t] = A_{sum}^{0} e^{\frac{-t}{\tau _{sum}}} + A_{sum}^{\infty }\), where \(A_{sum}^{0}\) and \(A_{sum}^{\infty }\) denote the value at time zero and at steady state, assuming a single-state learning model37,38. This parameter is only used when the participants are adapting or de-adapting to the visuomotor rotation provided in the second experiment.
All parameters related to the task performance were computed considering only the movements from center to peripheral targets, since movements toward the wrist neutral position result to be easier for participants than moving toward periphery35. Conversely, for the computation of the Donders Surfaces, and thus all related parameters, the entire movement was used (i.e. from center to periphery and vice versa). Thickness was used to identify and exclude outlier trials from statistical analysis (trials with Thickness higher than the average over all trials plus 2 standard deviations have been excluded). All the above-mentioned parameters have been evaluated in each participant for each trial, and then averaged along the total amount of trials, after excluding outliers. Specifically, the results related to outlier exclusion of the first experiment (“Assessing Donders’ law stability over time“) are reported in Table 1, while the ones related to the second experiment (“Assessing Donders’ law during motor adaptation“) are reported in Table 2.
Statistical analysis
We firstly checked for the normality of the data by means of the Shapiro-Wilk test39. As regards the assessment over time, according to the results of the normality test, we run either 1-Way Repeated Measures Analysis Of Variance (RM-ANOVA) or 1-Way Friedman Test considering the factor “Day” as the 4-levels within participants independent variable.
Concerning the assessment during motor adaptation, we run either a parametric (Repeated Measure ANOVA) or non-parametric (Friedman Test) 1-Way Repeated Measures Analysis, separately on each parameter (\(A_{sum}\), \(A_{net}\), Thickness and Shape Index), with the phases as 3-level factor (i.e. baseline, adaptation and washout). Moreover, we checked for the difference between adaptation and washout phases for \(\tau _{sum}\) using a paired sample test.
Data availibility
The datasets generated and/or analysed during the current study are not publicly available since the informed consent signed by the volunteers enrolled in the study did not contain the possibility to share the data publicly. Nevertheless, data are available from the corresponding author on reasonable request.
References
Wolpert, D. M. Computational approaches to motor control. Trends Cogn. Sci. 1, 209–216 (1997).
Todorov, E., Li, W. & Pan, X. From task parameters to motor synergies: A hierarchical framework for approximately optimal control of redundant manipulators. J. Robot. Syst. 22, 691–710 (2005).
Guigon, E., Baraduc, P. & Desmurget, M. Computational motor control: Redundancy and invariance. J. Neurophysiol. 97, 331–347 (2007).
Latash, M. L. Human movements: Synergies, stability, and agility. In Biomechanics of Anthropomorphic Systems 135–154 (Springer, 2019).
Campolo, D., Formica, D., Guglielmelli, E. & Keller, F. Kinematic analysis of the human wrist during pointing tasks. Exp. Brain Res. 201, 561–573 (2010).
Donders, F. C. Beitrag zur lehre von den bewegungen des menschlichen auges. Holland Beitr Anat. Physiol. Wiss 1, 104–145 (1847).
Campolo, D., Accoto, D., Formica, D. & Guglielmelli, E. Intrinsic constraints of neural origin: Assessment and application to rehabilitation robotics. IEEE Trans. Rob. 25, 492–501 (2009).
Campolo, D., Widjaja, F., Esmaeili, M. & Burdet, E. Pointing with the wrist: A postural model for Donders’ law. Exp. Brain Res. 212, 417–427 (2011).
Formica, D., Campolo, D., Taffoni, F., Keller, F. & Guglielmelli, E. Motor adaptation during redundant tasks with the wrist. In 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 4046–4049 (IEEE, 2011).
Tommasino, P. Task-space Separation Principle: From Human Postural Synergies to Bio-inspired Motion Planning for Redundant Manipulators (Springer, 2018).
Desmurget, M., Gréa, H. & Prablanc, C. Final posture of the upper limb depends on the initial position of the hand during prehension movements. Exp. Brain Res. 119, 511–516 (1998).
Gielen, C., Vrijenhoek, E., Flash, T. & Neggers, S. Arm position constraints during pointing and reaching in 3-d space. J. Neurophysiol. 78, 660–673 (1997).
Soechting, J. F., Buneo, C. A., Herrmann, U. & Flanders, M. Moving effortlessly in three dimensions: Does Donders’ law apply to arm movement?. J. Neurosci. 15, 6271–6280 (1995).
Tweed, D. & Vilis, T. Geometric relations of eye position and velocity vectors during saccades. Vision. Res. 30, 111–127 (1990).
Ewart, S., Hynes, S. M., Darling, W. G. & Capaday, C. A Donders’ like law for arm movements: The signal not the noise. Front. Hum. Neurosci. 10, 136 (2016).
Shadmehr, R. & Krakauer, J. W. A computational neuroanatomy for motor control. Exp. Brain Res. 185, 359–381 (2008).
Tee, K. P., Franklin, D. W., Kawato, M., Milner, T. E. & Burdet, E. Concurrent adaptation of force and impedance in the redundant muscle system. Biol. Cybern. 102, 31–44 (2010).
Zhou, S.-H., Oetomo, D., Tan, Y., Burdet, E. & Mareels, I. Modeling individual human motor behavior through model reference iterative learning control. IEEE Trans. Biomed. Eng. 59, 1892–1901 (2012).
Shadmehr, R. & Mussa-Ivaldi, F. A. Adaptive representation of dynamics during learning of a motor task. J. Neurosci. 14, 3208–3224 (1994).
Donchin, O., Francis, J. T. & Shadmehr, R. Quantifying generalization from trial-by-trial behavior of adaptive systems that learn with basis functions: Theory and experiments in human motor control. J. Neurosci. 23, 9032–9045 (2003).
Diedrichsen, J., White, O., Newman, D. & Lally, N. Use-dependent and error-based learning of motor behaviors. J. Neurosci. 30, 5159–5166 (2010).
Krigolson, O. & Holroyd, C. Evidence for hierarchical error processing in the human brain. Neuroscience 137, 13–17 (2006).
Ribas-Fernandes, J. J. et al. A neural signature of hierarchical reinforcement learning. Neuron 71, 370–379 (2011).
George, D. How the Brain Might Work: A Hierarchical and Temporal Model for Learning and Recognition (Stanford University, 2008).
Dorman, G. R., Davis, K. C., Peaden, A. W. & Charles, S. K. Control of redundant pointing movements involving the wrist and forearm. J. Neurophysiol. 120, 2138–2154 (2018).
Poewe, W. et al. Parkinson disease. Nat. Rev. Dis. Primers. 3, 17013 (2017).
Woods, V. Musculoskeletal disorders and visual strain in intensive data processing workers. Occup. Med. 55, 121–127 (2005).
di Biase, L. et al. Quantitative analysis of bradykinesia and rigidity in Parkinson’s disease. Front. Neurol. 9, 121 (2018).
Goyal, J., Khandnor, P. & Aseri, T. C. Classification, prediction, and monitoring of Parkinson’s disease using computer assisted technologies: A comparative analysis. Eng. Appl. Artif. Intell. 96, 103955 (2020).
Fregni, F. et al. Anodal transcranial direct current stimulation of prefrontal cortex enhances working memory. Exp. Brain Res. 166, 23–30 (2005).
Noccaro, A. et al. Development and validation of a novel calibration methodology and control approach for robot-aided transcranial magnetic stimulation (tms). IEEE Trans. Biomed. Eng. 68, 1589–1600 (2021).
Wu, G. et al. Isb recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion-part ii: Shoulder, elbow, wrist and hand. J. Biomech. 38, 981–992 (2005).
JASP Team. JASP (Version 0.14)[Computer software] (2020).
Oldfield, R. C. The assessment and analysis of handedness: The Edinburgh inventory. Neuropsychologia 9, 97–113 (1971).
Charles, S. K. & Hogan, N. The curvature and variability of wrist and arm movements. Exp. Brain Res. 203, 63–73 (2010).
Koenderink, J. J. & Van Doorn, A. J. Surface shape and curvature scales. Image Vis. Comput. 10, 557–564 (1992).
Cheng, S. & Sabes, P. N. Calibration of visually guided reaching is driven by error-corrective learning and internal dynamics. J. Neurophysiol. 97, 3057–3069 (2007).
Summa, S., Palmieri, G., Basteris, A. & Sanguineti, V. Concurrent adaptation to force fields and visual rotations. In 2012 4th IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), 338–343 (IEEE, 2012).
Razali, N. M. et al. Power comparisons of Shapiro–Wilk, Kolmogorov–Smirnov, Lilliefors and Anderson–Darling tests. J. Stat. Model. Anal. 2, 21–33 (2011).
Acknowledgements
This work was supported by the European Commission under the ”NIMA: Non-invasive Interface for Movement Augmentation” project (H2020-FETOPEN-2018-2020) and under H2020 Grant CONBOTS (ICT 871803).
Author information
Authors and Affiliations
Contributions
L.R., G.D.P. and D.F. conceived the experiment(s), L.R. and A.N. conducted the experiments, L.R. analysed the results. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Raiano, L., Noccaro, A., Di Pino, G. et al. Wrist redundancy management during pointing tasks remains stable over time and in presence of a visuomotor perturbation. Sci Rep 13, 6789 (2023). https://doi.org/10.1038/s41598-023-33531-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-33531-2
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
