
Abstract
The study aimed to compare the ankle muscles activation, biomechanics and energetics of running in male runners during submaximal level run using minimalist (MinRS) and traditional cushioned (TrdRS) running shoes. During 45-min running in MinRS and TrdRS, the ankle muscles pre- and co-activation, biomechanics, and energetics of running of 16 male endurance runners (25.5 ± 3.5 yr) were assessed using surface electromyography (tibialis anterior and gastrocnemius lateralis), instrumented treadmill and indirect calorimetry, respectively. The net energy cost of running (Cr) was similar for both conditions (P = 0.25) with a significant increase over time (P < 0.0001). Step frequency (P < 0.001), and total mechanical work (P = 0.001) were significantly higher in MinRS than in TrdRS with no evolution over time (P = 0.28 and P = 0.85, respectively). The ankle muscles pre- and co-activation during the contact phase did not differ between the two shoe conditions (P ≥ 0.33) or over time (P ≥ 0.15). In conclusion, during 45-min running, Cr and muscle pre- and co-activation were not significantly different between MinRS and TrdRS with significantly higher step frequency and total mechanical work noted in the former than in the latter. Moreover, Cr significantly increased during the 45-min trial in both shoe conditions along with no significant change over time in muscle activation and biomechanical variables.
Similar content being viewed by others

Introduction
Minimal running shoes (MinRS) have gained popularity over the last two decades. Among their supposed advantages, MinRS have been advocated to improve the running economy—the energy cost of running (Cr; the energy expenditure per unit of distance)—and reduce the impact peak and loading rate by promoting a forefoot strike1. Running economy is a key determinant of aerobic long-distance performance2. Although running biomechanics occurring during the propulsion phase seem to have the strongest direct link with running economy, it is difficult to identify the main biomechanical factors involved in improving running economy in MinRS, and inconsistent evidence still exists3. Therefore, it seems pivotal to assess running economy along with biomechanical running parameters and total mechanical work to evaluate mechanical efficiency (i.e., the mechanical work divided by Cr). In fact, the latter concomitantly takes into account the energetics and mechanics of running and may provide valuable insight into running patterns, particularly into mechanical energy saving mechanisms.
Despite the expected benefits, the actual MinRS advantages on running economy are difficult to establish4, particularly when focusing on the transitioning phase to MinRS5. However, a modest but significant running economy advantage in MinRS compared with traditional cushioned running shoes (TrdRS) was reported regardless of the strike type6,7, which was confirmed by meta-analyses6. Although this slight running economy advantage in MinRS may be associated to their lower mass8 compared with TrdRS, the contributing biomechanical factors involved in this higher running economy seems difficult to demonstrate. In fact, MinRS may alter the biomechanics of running compared with TrdRS inducing forefoot strike9, shorter ground contact time (tc)10, increased step frequency11 and leg stiffness (kleg; the ratio between maximal vertical ground reaction force and lower limb deformation, which characterizes the elastic property of the linear lower limb spring)12. This increased kleg associated with forefoot strike may result in a higher storage-release of elastic energy in the muscle–tendon unit during running [the stretch–shortening cycle13] in MinRS than in TrdRS. An optimal kleg is a tradeoff involving several constraints; a stiffer lower limb may imply shorter tc and lower vertical displacements of the center of mass, both of which may be involved in decreasing Cr14 and increasing running mechanical efficiency15. On the other hand, increasing Kleg above this optimal value during running may induce higher loads related to increasing risks of injury and increased muscle activation associated with an increased metabolic cost16.
Agonist ankle muscle preactivation (muscle activation prior to ground contact) and ankle muscle coactivation (simultaneous activation of agonist and antagonist muscles during ground contact) were both increased in forefoot strike pattern17 and may contribute to increased storage-release of elastic energy18,19 and kleg20 during running in MinRS but at the expense of Cr. These findings suggest that an optimal interplay may exist between lower limb muscle preactivation and coactivation, kleg and running economy and that this equilibrium might be changed in MinRS and may penalize runners with running duration in long-running sessions, especially during the phase of transitioning to MinRS7,21. However, the biomechanical and energy running comparison between MinRS and TrdRS is often restrained to a short bout of running (5–10 min). Only two studies investigated the effect of running duration in MinRS vs. TrdRS22,23, demonstrating a specific increase in running economy exclusively with MinRS23 associated with distinct biomechanical changes22,23 in two footwear conditions over time (a more pronounced decrease in kleg and increase in footstrike angle in MinRS than in TrdRS). However, one study examined the effect of footwear on the running economy and biomechanics only after a short-distance trail23. This design did not allow the authors to compare energetic and biomechanical changes during running in two footwear conditions (i.e., time course of changes)23. Another study22 only investigated the biomechanical changes during 50 min of running composed of 5 blocks of 5 min of flat, ascent (5%) and descent (-5%) treadmill running. This mixed profile of the trial used in this study22 (different slope conditions) may have influenced the comparison during running between the two footwear conditions.
Therefore, the aim of this study was to compare the ankle muscle pre- and co-activation and biomechanics and energetics of running in healthy male endurance runners during 45 min of level ground running (sampled at 5, 15, 30 and 45 min) at 95% of the ventilatory threshold using MinRs and TrdRS. We hypothesized that (1) at the beginning of the trial (5 min), Cr would be lower and step frequency, kleg and ankle muscle preactivation and coactivation would be higher in MinRS compared with TrdRS; and (2) a more pronounced increase in Cr and ankle muscle activations associated with a greater decrease in kleg would be found over exercise duration in MinRS compared with TrdRS. Finally, we also explored the changes in the total mechanical work and efficiency in MinRs vs TrdRS during 45-min running.
Methods
Participants
Sixteen healthy male experienced endurance runners (25.5 ± 3.5 yr; 1.85 ± 0.06 m; 73.6 ± 5.7 kg; personal best record for running 10 km: 39.6 ± 1.8 min) volunteered and provided written informed consent to participate in this study. All participants were regular rearfoot runners using TrdRS with no major injuries in the past 3 months, no lower extremity abnormalities, and a reference time of 10 km of 40 min or less.
Experimental design
Participants visited the laboratory on three occasions. In the first experimental session, participants’ anthropometric assessments and personal and training information were collected. Then, using their usual TrdRS, the participants performed a submaximal incremental running test until the respiratory exchange ratio (RER) reached 1.0 on an instrumented treadmill (T150–FMT-MED, Arsalis, Belgium) to assess their first ventilatory threshold. At the end of this first visit, a pair of FiveFingers (Vibram, Italy) was given to each runner as MinRS to perform a familiarization protocol period of 2 weeks involving a gradual exposition to minimalistic shoes over 4 training sessions (first session: 5 min; second session: 10 min; third session: 15 min; fourth session: 20 min) performed at moderate running intensity similar to that used in the last two visits. This familiarization must be performed before the last 2 experimental sessions, in which each runner performed a continuous submaximal running test for 45 min at 95% of the first ventilatory threshold once using TrdRS and once again using MinRS in randomized order. For the 2 experimental conditions, the mass of the shoes was paired (320 g) using small lead strips firmly attached to the uppers of the running shoes8. The metabolic data were continuously collected in each experimental session, whereas the biomechanical data were assessed in the second and third sessions at 5, 15, 30 and 45 min of the continuous submaximal running test.
Exercise testing
Submaximal incremental running test
After a 5-min rest period on the treadmill, participants ran for a 10-min warm-up at a speed of 8 km h−1, which was followed by an increase of 1 km h−1 every 3 min until the RER reached 1.0. During the tests, oxygen uptake and CO2 output were measured continuously using a breath-by-breath online system (Oxycon Pro, Jaeger, Würzburg, Germany). Before each test, the metabolic card was calibrated with 16% O2 and 5% CO2 at low, medium and high flow rates utilizing a 3-l air syringe according to the manufacturer’s recommendations. The first ventilatory threshold was determined as described in the literature using Wasserman’s ventilatory method24, which consists of visually determining the point at which the ventilatory equivalent for O2 increases while the ventilatory equivalent for CO2 remains stable. To support this estimate of the first ventilatory threshold, we then used the Beaver ventilatory method24 determining the inflection point of the CO2 output with respect to the oxygen uptake. Three blinded and independent investigators determined the first ventilatory threshold.
Submaximal continuous running test
After a 5-min rest period and a standardized 10-min warm-up at 10 km h−1, the runners performed a 45-min submaximal continuous running exercise at an intensity corresponding to 95% of the first ventilatory threshold determined during the submaximal incremental test. Gas exchanges were continuously measured and used to assess the ventilation, RER and net energy cost of running at 5, 15, 30 and 45 min during the test. At these time points, heart rate and biomechanical data (20 consecutive steps) were also assessed using an heart rate monitor (S810i, Polar Electro OY, Finland) and an instrumented treadmill, respectively (please see paragraph “Assessments” for details).
Assessments
Net energy cost of running
Breath-by-breath oxygen uptake data were initially examined to exclude errant breaths due to coughing or swallowing [oxygen uptake values ≥ 3 standard deviations (SD) from the local mean were deleted]. Then, the oxygen uptake, ventilation and RER values from the last minute before the 5th, 15th, 30th and 45th minutes were averaged. The oxygen uptake values were then divided by body mass and converted to gross metabolic rates using a standard equation25 to calculate the energy equivalent of 1 L of oxygen (Eq.O2; Eq. 1).
The metabolic rate during standing was subtracted from all gross metabolic rates to calculate the net metabolic rate at each time point. Then, these latter values were divided by the running speed to obtain the net energy cost of running (Cr, J kg−1 m−1).
Biomechanics of running
Spatiotemporal parameters
For each experimental condition at 5, 15, 30 and 45 min, tc, step frequency and length were assessed during 20 consecutive steps using the instrumented treadmill and acquired at a sample rate of 1000 Hz. For 30 s of each time point, the ground reaction forces were assessed in the vertical, horizontal and lateral components. Foot contact and toe-off events were determined based on the 20-N vertical force threshold level. The contact time was defined as the period during which the vertical force was greater than 20 N. The step length and frequency were assessed as the distance and the inverse of the duration between two consecutive foot contacts, respectively.
Mechanical works
The external mechanical work of running (J kg−1 m−1), which is defined as the mechanical work performed to move the center of mass, was computed as the sum between the fore-aft and lateral and vertical mechanical works15,26. These mechanical works were obtained from 3D forces allowing the computation of the velocity in all three directions (Vv, Vh, and Vl) and vertical displacement of the center of mass over time by single mathematical integration of the three accelerations (obtained by the ground reaction force measurements) and by double mathematical integration of the vertical acceleration, respectively26. The fore-aft and lateral and vertical mechanical works were calculated as the sum of positive increments in the fore-aft and lateral kinetic (Eq. 2) and vertical (Eq. 3) energies of the center of mass over a complete step, respectively.
where m is the body mass.
where m is the body mass, sv is the vertical displacement of the center of body mass and g is the acceleration of gravity (g = 9.81 m s−2).
The mechanical internal work (Wint in J kg−1 m−1), which is the work performed to move the limbs around the center of mass, was estimated using the formula of Nardello et al.27 (Eq. 4).
where SF is the stride frequency, v is the running speed, DF is the duty factor [the fraction of the duration of the stride period when each foot is on the ground27] and 0.08 is a compound dimensionless term accounting for the inertial properties of the limbs and the mass partitioned between the limbs and the rest of the body27.
Total positive mechanical work performed per distance traveled was evaluated as the sum of the external mechanical work and internal mechanical work28.
Leg stiffness
The leg stiffness (kleg in N m−1) was calculated as a ratio of the maximal vertical force (Fv,max in N) during contact to the lower limb deformation (i.e., the peak displacement of the leg spring in m) (∆L in m; Eq. 5).
where ∆L is calculated from Eq. 6 according to Morin et al.29.
where L is the initial leg length (great trochanter-to-ground distance in a standing position) (m), v is the running speed (m s−1), tf is the fly time (s) and ∆y is the downward displacement of the center of mass.
Braking and propulsive durations and forces and loading, braking and propulsive rates
Push and brake time and their ratio were assessed. The peaks of braking and propulsive forces were determined as the minimum and maximum of the horizontal force during the contact phase, respectively. The braking and propulsive rates were calculated as the slope of the horizontal force between 20 and 80% of the period between the initial contact and minimum of the horizontal force and between the mid-stance time and maximum of the horizontal force, respectively. The loading rate was computed as the slope of the vertical force between 20 and 80% of time between initial contact and 15% of the stance phase30,31. This method was chosen to have a uniform measurement across runners and conditions. All these values were then normalized by body mass.
Mechanical efficiency
The mechanical efficiency was defined as the ratio of the total positive mechanical work to Cr28 both expressed in J kg−1 m−1.
Muscle activation and coactivation
Surface electromyography (EMG) was obtained from the tibialis anterior (TA) and gastrocnemius lateralis (GL) during both shoe condition trials (EMG100C, Biopac Systems Inc., Hilliston, MA, USA). Prior to placement, the skin areas were prepared (shaved, abraded and cleaned with alcohol to lower skin impedance), and two surface electrodes (Ag/AgCl, 11 mm diameter) were placed on the muscle location according to SENIAM guidelines32. The signals were treated using dedicated software (Biopac Systems Inc., Hilliston, MA, USA). The raw digital EMG signals were filtered (20 Hz – 450 Hz), fully rectified and low-pass filtered (20 Hz). Preactivation was defined as the muscle activity during the 100 ms before the foot contact (preactivation phase) normalized by the muscle activity obtained during the warm-up at 10 km/h. The preactivation ratio was calculated by dividing the normalized TA preactivation by the normalized GL preactivation (TA/GL preactivation ratio). Muscle activation was defined as a deviation of 5 standard deviations from the resting EMG baseline33. Coactivation of GL and TA was determined as the time when both muscles were simultaneously active during the stance phase and expressed as a percentage of total stride duration33.
Rating of perceived effort and postexercise lower limb muscle pain
Participants were asked to rate their perceived exertion during running at 5, 15, 30 and 45 min using the Borg rating of perceived exhaustion scale34. Postexercise muscle pain of the lower limbs was assessed at 24 h, 48 h and 72 h using a 0–10 visual analog scale.
Statistical analysis
All statistical analyses were performed with SPSS version 24 (SPSS, Chicago, IL). Data are expressed as means ± SD for all variables. A two-way repeated measures ANOVA [time (5, 15, 30 and 45 min) × shoe condition (MinRS vs, TrdRS)] was used to determine differences in muscle coactivation, energetics and biomechanics of running. When the assumption of sphericity was violated, Green-House-Geisser or Huynh–Feldt adjustments were employed where appropriate. When repeated-measures ANOVA revealed a significant main effect (time or shoes condition) or interaction effect, multiple comparisons with Bonferroni adjustments were performed to test the significance of the differences. To minimize the type 1 errors due to the 30 ANOVAs used to determine differences in the experimental variables of this study, the level of significance was set as P ≤ 0.0016 (i.e., 0.05/30).
Ethics approval and consent to participate
This study was approved by the local ethics committee (Cantonal Swiss Ethics Committees on research involving humans; CER-VD 468/13) and all the participants provided written informed consent. All the participants provided written informed consent for participation and publication.
Results
The F, P and partial eta squared values for the two-way repeated measures ANOVAs used in this study are reported in Table 1.
Energetics of running
Net energy cost of running
Participants ran at 11.8 ± 0.6 km/h. There was no significant time × condition interaction in Cr (P = 0.81). Cr was similar for both conditions (P = 0.25) with a significant increase over time (P < 0.0001; Fig. 1). Cr significantly increased at 15 and 30 min compared to 5 min (P < 0.0001 and P < 0.0001, respectively) and at 45 compared to 5 and 15 (P < 0.0001, P < 0.001, respectively).

Net energy cost (Cr) vs. time during the two experimental conditions [traditional cushioned (TrdRS) and minimalist (MinRS) running shoes]. Values are mean ± SD (n = 16). † indicates a significant time effect (P ≤ 0.05); †5 represents a significant difference from 5 min; †15 notes a significant difference from 15 min.
Ventilation
There was no significant time × condition interaction in the ventilation (P = 0.85). This variable was similar in both conditions (P = 0.56) and increased significantly over time (P < 0.0001; Fig. 2A). Post hoc analysis revealed a significant increase in ventilation at 15 and 30 min than at 5 min (P = 0.001 and P = 0.001, respectively) and at 45 min compared to 5 and 15 min (P < 0.0001 and P = 0.001, respectively).

Ventilation (A), respiratory exchange ratio (RER) (B) and heart rate (C) versus time during the two experimental conditions [traditional cushioned (TrdRS) and minimalist (MinRS) running shoes]. Values are mean ± SD (n = 16). † indicates a significant time effect (P ≤ 0.05); †5 denotes a significant difference from 5 min; †15 represents a significant difference from 15 min; †30 indicates a significant difference from 30 min.
Respiratory gas exchange
No significant time × condition interaction (P = 0.97) and difference in RER between conditions (P = 0.44) were noted. However, RER significantly changed over time (P < 0.0001; Fig. 2B). RER significantly increased at 15 compared to 5 and 30 min (P < 0.0001 and P < 0.0001, respectively) and significantly decreased at 45 min compared to 15 and 30 min (P < 0.0001 and P < 0.001, respectively).
Heart rate
There were no significant time × condition interaction (P = 0.47) and shoe condition (P = 0.13) in the heart rate. However, the heart rate increased significantly over time (P < 0.0001; Fig. 2C). Post hoc analysis revealed a significant increase in heart rate at 15, 30, and 45 min than at 5 min (P < 0.0001 for all) and at 45 min compared to 15 and 30 min (P < 0.0001 for both) and at 30 min than at 15 min (P = 0.0001).
Biomechanics of running
Spatiotemporal parameters
No significant interaction (P ≥ 0.20) and evolution over time (P ≥ 0.25) were found in tc, step length and frequency. The step length was significantly shorter (P = 0.001) and step frequency was significantly higher in MinRS than in TrdRS (P = 0.001; Table 2). There was no significant difference in tc (P = 0.032; Table 2).
Mechanical works
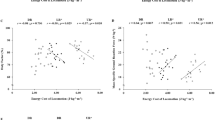
There were no significant time × condition interaction, shoe condition and evolution over time in the external (P = 0.27, P = 0.02 and P = 0.35, respectively) and vertical (P = 0.29, P = 0.01 and P = 0.45, respectively) mechanical works per unit distance (Fig. 3 A,B). No significant time × condition interaction (P = 0.42) and evolution over time (P = 0.22) were found fore-aft and lateral work per distance. However, this latter was significantly higher in MinRS compared with TrdRS (P < 0.0001; Fig. 3C).

External mechanical work (Wext) (A), vertical mechanical work (Wv) (B), kinetic fore-aft and lateral mechanical work (Wkfl) (C), internal mechanical work (Wint) (D), total mechanical work (Wtot) (E) and leg stiffness (kleg) (F) versus time during the two experimental conditions [traditional cushioned (TrdRS) and minimalist (MinRS) running shoes]. Values are mean ± SD (n = 16). * indicates a significant condition effect (P ≤ 0.05).
There were no significant time × condition interaction (P = 0.26) and evolution over time (P = 0.85) in the internal mechanical work per unit distance which was significantly higher in MinRS compared with TrdRS (P < 0.001, Fig. 3E).
No significant time × condition interaction (P = 0.26) and evolution over time (P = 0.85) were noted in the total mechanical work. However, this work was significantly higher in MinRS compared with TrdRS (P = 0.001; Fig. 3D).
Leg stiffness
No significant variation in the time × condition interaction, shoe and time conditions were found in Fv,max/BM (P = 0.44, P = 0.04 and P = 0.56, respectively; Table 2), lower limb deformation (P = 0.18, P = 0.02 and P = 0.57, respectively; Table 2) and kleg (P = 0.11, P = 0.05 and P = 0.92, respectively; Fig. 3F).
Braking and propulsive durations and forces and loading, braking and propulsive rates
No significant interaction (P = 0.33), time (P = 0.33) and condition (P = 0.21) effects were noted in the push time (Table 2). There were no significant time × condition interaction (P = 0.43) and time (P = 0.29) effects in the brake time with this variable which was significantly shorter in MinRS than in TrdRS (P = 0.001; Table 2). These findings induced a significantly higher push-to-brake time ratio in the former compared with the latter (P = 0.001) with no significant time or interaction effects (P = 0.69 and P = 0.59, respectively; Table 2).
No significant interaction (P = 0.34), time (P = 0.56) and condition (P = 0.63) effects were noted in the loading rate (Table 2).
There was no significant time × condition interaction (P = 0.03) in the peak braking force with no significant evolution over time (P = 0.63) and difference between the two conditions (P = 0.68; Table 2). No significant interaction (P = 0.56), shoe (P = 0.02) and time (P = 0.76) effects were found in the braking rate. There were no significant time × condition interaction (P = 0.18) and change over time (P = 0.58) in the peak propulsive force which was significantly higher in MinRS compared with TrdRS (P < 0.0001; Table 2). No significant interaction (P = 0.83), shoe (P = 0.01) and time (P = 0.13) effects were found in the propulsive force rate (Table 2).
Mechanical efficiency
No significant time × condition interaction (P = 0.42) and shoe condition (P = 0.01) were noted in mechanical efficiency. However, this variable significantly decrease over time (P < 0.0001; Fig. 4).

Mechanical efficiency versus time during the two experimental conditions [traditional cushioned (TrdRS) and minimalist (MinRS) running shoes]. Values are mean ± SD (n = 16). † denotes a significant time effect (P ≤ 0.05); †5 indicates a significant difference from 5 min; †15 represents a significant difference from 15 min.
Pairwise comparison revealed a significant decrease in mechanical efficiency at 30 than at 5 (P < 0.001) and at 45 min compared to 5 and 15 min (P < 0.001 for both; Fig. 4).
Muscle preactivation and muscle coactivation during the contact phase
TA and GL preactivation, TA/GL preactivation ratio and TA and GL coactivation during the contact phase showed no significant time × condition interaction (P ≥ 0.40), time (P ≥ 0.40) and condition (P ≥ 0.33) effects (Fig. 5).

Tibialis anterior (TA) (A) and gastrocnemius lateralis (GL) (B) preactivation, TA/GL preactivation ratio (C) and TA and GL coactivation during the contact phase (D) versus time during the two experimental conditions [traditional cushioned (TrdRS) and minimalist (MinRS) running shoes]. Values are mean ± SD (n = 14).
Rating of perceived effort and postexercise lower limb muscle pain
There were no significant time × condition interaction (P = 0.88) and condition (P = 0.76) effects in the rating of perceived effort. However, this variable increased significantly over time (P < 0.0001; Table 2). A significant time × condition interaction was found in the postexercise visual analog scale (P < 0.0001). This latter was significantly higher in MinRS compared with TrdRS (24 h: 5.0 ± 2.0 and 2.1 ± 1.2, 48 h: 4.1 ± 1.83 and 1.6 ± 0.7, and 72 h: 2.1 ± 1.0 and 1.0 ± 0.0, in MinRS and TrdRS, respectively; P < 0.0001) and significantly decreased at 72 h compared to 24 and 48 h (P < 0.0001 for both) with no significant difference between 24 and 48 h (P = 0.08) in MinRS. In contrast, no significant evolution over time was found in TrdRS (P ≥ 0.003).
Discussion
Our findings showed that at the beginning of the trial (5 min), Cr and muscle pre- and co-activation were not significantly different between minimalist and traditional cushioned running shoes, and step frequency and kleg (although nonsignificant for this latter) were higher in the former compared with the latter. This finding partially confirms the first hypothesis of this study. Moreover, Cr significantly increased during the 45-min trial but with no significant difference between shoe wear conditions along with no significant change over time in step frequency, kleg, total mechanical work and muscle pre- and co-activation for both conditions in contrast with the second hypothesis of this study. Only postexercise muscle pain was higher in minimalist shoes compared with traditional cushioned shoes.
To the best of our knowledge, this study is the first to investigate the time course of Cr in MinRS versus TrdRS during moderate-intensity exercise. During the whole exercise duration, our results showed that Cr was not significantly different between the shoe conditions with both increasing over time (~ + 5% between 5 and 45 min; Fig. 1). This increased Cr was associated with no significant change in muscle activations and total mechanical work over time induced a significant decrease in mechanical efficiency (~ − 5%) with exercise duration, which may be detrimental for endurance running performance. Therefore, this alteration in running economy was not related to neuromechanical changes in the running pattern but due to physiological modifications with exercise duration. This upward drift in Cr during moderate and prolonged (> 30 min of duration) exercise may thus result from increasing blood levels of catecholamines, metabolic cost of ventilation, body temperature, and shifting in substrate utilization due to increased lipid oxidation over time35,36. This finding was partially corroborated by our results showing a significant increase in heart rate and ventilation between 5 and 45 min (~ + 8% and + 9%, respectively) with no significant change in RER between these time points (Fig. 2).
These results are not completely consistent with previous studies investigating the effect of duration on the energetics and biomechanics of running in MinRS and TrdRS22,23. Vercruyssen et al.23 found that after a short-distance trail, Cr was increased only in MinRS with a more pronounced decrease in kleg and increase in footstrike angle compared with TrdRS. Moreover, the post-trail muscle calf pain increased significantly during level running only in MinRS compared with TrdRS. The latter result is indirectly corroborated by our higher post-exercise lower limb muscle pain in minimalist vs. traditional cushioned shoes even if our participants were familiarized with MinRS with 2 weeks (4 training sessions) of gradual exposition to this type of shoe. This increased post-exercise muscle pain should have been associated with increased muscle activation in MinRs vs. TrdRS and a more pronounced increase over time in this variable in the former than in the latter, as previously suggested7,21. However, our results of muscle pre- and co-activation during the contact phase did not present these differences between the two shoe conditions and over time (Fig. 5). This finding could be due to the well-known limitation in using dynamic EMG during running to assess muscle activation37, which could be even more important with our measurements during the 45-min submaximal exercise. The high variability in our EMG data indicates that the use of this parameter is hence limited and has to be interpreted with caution.
Another study22 investigating the biomechanical changes during 50 min of mixed-profile treadmill running [5 blocks of 5 min of flat, ascent (5%) and descent (-5%)] reported that flight time, plantar flexion, foot angles, and kleg significantly decreased over time only in MinRS and not in TrdRS even if the difference between the 2 shoe conditions disappeared after 30 min of running. This finding is in contrast with our findings showing no significant changes in spatiotemporal parameters (Table 2) and kleg (Fig. 3F) over time in either shoe condition. However, our results corroborated those reporting that kleg did not change after exercise and was similar in running modality (level running), duration (60 min), and intensity (moderate intensity) to that used in the present study but performed in traditional cushioned shoes38. Therefore, longer exhaustive or more intensive exercise seems to be required to induce neuromuscular fatigue and decrease kleg22. Nevertheless, the difference between our findings and those of previous studies may also be due to the differences in fatiguing exercises used (level vs. trail or mixed profile running). Moreover, compared with previous studies, the originality of our results was to simultaneously assess the time course of change in energetics and biomechanics of running as previously suggested23.
Our results showed no significant difference between the 2 shoe conditions in contrast to the recent meta-analytical review reporting a Cr slightly lower in MinRS than in TrdRS6. However, the findings of the present study confirmed the typical biomechanical differences between these conditions, such a higher step frequency (Table 2) and kleg (although nonsignificant for this latter; Fig. 3F) in MinRS compared with TrdRS22,39,40, but extended these results over time (45 min of level running at moderate intensity) and added the assessment of mechanical works during this exercise. Our findings showed that total and internal mechanical works were higher in MinRS compared with TrdRS (~ + 2.7%, + 4.8%, respectively; Fig. 3). According to the equation used to estimate the internal mechanical work27, the higher internal mechanical work was due to the higher step frequency in MinRS vs. TrdRS. The higher but nonsignificant external mechanical work in the former compared with the latter was due to the greater fore-aft and lateral work (+ 8%), which was associated with lower vertical mechanical work (− 4.5%). A greater variation in vh is involved in this greater fore-aft and lateral work in MinRS. This finding was essentially due to a higher average braking force during the contact phase in MinRS than in TrdRS. In fact, a more landing-takeoff asymmetry in the former (i.e., higher push time/brake time; Table 2) implies a higher average breaking force than the average propulsive force in this shoe condition41. However, this extra-fore-aft and lateral work did not require an increase in Cr because this greater braking force would allow the muscle–tendon units to store and then release a low-metabolic cost elastic energy, as indirectly attested by nonsignificant higher values of kleg (+ 2.3%) and mechanical efficiency (+ 4.2%) in MinRS than in TrdRS (Figs. 3F and 4). These results partially confirm those of Ardigo et al.42 showing a higher forward kinetic work but similar vertical work in forefoot running compared with rear foot running, inducing higher external and total mechanical works and similar Cr in the former compared with the latter.
On the other hand, the higher internal mechanical work, step frequency and average breaking force in MinRS compared with TrdRS may penalize Cr in minimalist shoes. In fact, the optimal step frequency (i.e., step frequency that minimizes Cr) is influenced by the tradeoff between the cost of swinging the lower limbs and the cost of braking forces related to the anteroposterior foot position relative to the hip (i.e., ~ center of body mass position) at landing43. This feature may negatively compensate for the energetic advantage due to the better use of the elastic energy in MinRS and contribute to increasing Cr under this shoe condition, making it similar between MinRS and MaxRS.
Another supposed advantage for minimalist shoes is the reduced loading rates1 associated with lower injury risks44 even if it has been recently shown that there is inconsistent45 or no46 evidence for the association between loading rate and injury risks. In our study, there was no significant difference in loading rate between MinRS and TrdRS (Table 2) in contrast with previous findings1. However, our results are consistent with those of Tam et al.47, revealing a similar loading rate between experienced traditional cushioned and minimalist runners. The former may use the additional cushioning provided by their traditional cushioned shoes to attenuate the greater loading rate typically found in these runners compared with minimalist runners47. Moreover, this result still indirectly attests that our runners are properly familiarized with MinRS. The gradual exposition to minimalistic shoes during the 2-wk familiarization protocol allows our runners to obtain a nonsignificant lower braking force rate in MinRS compared with TrdRS thanks to a longer duration between initial ground contact and peak braking force in the former compared with latter conditions. In MinRS, our runners adopted this “protective” strategy to decrease the impact of the higher average braking force during the initial contact phase as previously also reported by others48.
This study has some methodological limitations. First, we tested only one endurance running speed (11.8 ± 0.6 km/h), and these results should be confirmed with faster running speeds. However, we used this speed, corresponding to 95% of the ventilatory threshold, to accurately assess Cr with indirect calorimetry. Second, a quantitative assessment of foot strike patterns49 in the two shoe conditions could have been complementary to the measurements performed in this study. Nevertheless, the experimenters visually and quantitatively determined the foot strike pattern of the runners watching 3 video tracks of 30 s acquired at 5, 15 and 40 min during the two shoe condition trials for each runner. Comparing TrdRS to MinRS, 11 runners changed the foot strike pattern from the rear- to midfoot strike pattern, 1 changed from the mid- to forefoot strike pattern, and 4 runners did not change their rearfoot strike pattern. In MinRS, only 2 runners changed the foot strike pattern one time (from 5 to 15 min) during the 45-min running bout: one changed from the rear- to midfoot and one from the fore- to midfoot strike pattern. In TrdRS, only one runner changed between 5 and 15 min from the rear to midfoot. Future studies should thus include a quantitative assessment of foot strike patterns49 to isolate the effect of these patterns and the type of shoes on the energetics and mechanics of running and their changes over time.
Conclusions
In conclusion, during 45-min submaximal running, our findings showed that Cr and muscle pre- and co-activation were not significantly different between minimalist and traditional cushioned running shoes with significantly higher step frequency and total mechanical work, and nonsignificant greater kleg noted in the former than in the latter. The similar Cr between the two shoe conditions may be explained by the better use of the elastic energy in MinRS that is subsequently penalized by the metabolic cost associated with the higher step frequency and average braking force compared with TrdRS. Moreover, Cr significantly increased during the 45-min trial in both shoe conditions along with no significant change over time in muscle activation and biomechanical variables. Therefore, this alteration in the running economy may not be related to the neuromechanical changes in the running pattern but likely due to physiological modifications with exercise duration.
Data availability
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.
Abbreviations
- ΔL:
-
Lower limb deformation
- Cr :
-
Net energy cost of running
- DF:
-
Duty factor
- Ekfl :
-
Fore-aft and lateral kinetic energies of the center of mass
- Ekv :
-
Vertical kinetic energy of the center of mass
- EMG:
-
Surface electromyography
- Ep :
-
Potential energy of the center of mass
- Ev :
-
Vertical energy of the center of mass
- Fv,max :
-
Maximal vertical ground reaction force
- g:
-
Acceleration of gravity
- GL:
-
Gastrocnemius lateralis
- kleg :
-
Leg stiffness
- L:
-
Initial leg length
- m:
-
Body mass
- MinRS:
-
Minimalist running shoes
- TrdRS:
-
Traditional cushioned running shoes
- TA:
-
Tibialis anterior
- RER:
-
Respiratory exchange ratio
- SF:
-
Stride frequency
- tc :
-
Contact time
- tf :
-
Fly time
- v:
-
Running speed
- Vh :
-
Horizontal velocity of the center of body mass
- Vl :
-
Lateral velocity of the center of body mass
- Vv :
-
Vertical velocity of the center of body mass
References
Davis, I. S., Rice, H. M. & Wearing, S. C. Why forefoot striking in minimal shoes might positively change the course of running injuries. J. Sport Health Sci. 6, 154–161. https://doi.org/10.1016/j.jshs.2017.03.013 (2017).
di Prampero, P. E. Factors limiting maximal performance in humans. Eur. J. Appl. Physiol. 90, 420–429. https://doi.org/10.1007/s00421-003-0926-z (2003).
Moore, I. S. Is there an economical running technique? A review of modifiable biomechanical factors affecting running economy. Sports Med. 46, 793–807. https://doi.org/10.1007/s40279-016-0474-4 (2016).
Cochrum, R. G. et al. Comparison of running economy values while wearing no shoes, minimal shoes, and normal running shoes. J. Strength Cond. Res. 31, 595–601. https://doi.org/10.1519/JSC.0000000000000892 (2017).
Warne, J. P. & Gruber, A. H. Transitioning to minimal footwear: A systematic review of methods and future clinical recommendations. Sports Med. Open 3, 33. https://doi.org/10.1186/s40798-017-0096-x (2017).
Cheung, R. T. & Ngai, S. P. Effects of footwear on running economy in distance runners: A meta-analytical review. J. Sci. Med. Sport 19, 260–266. https://doi.org/10.1016/j.jsams.2015.03.002 (2016).
Perl, D. P., Daoud, A. I. & Lieberman, D. E. Effects of footwear and strike type on running economy. Med. Sci. Sports Exerc. 44, 1335–1343. https://doi.org/10.1249/MSS.0b013e318247989e (2012).
Franz, J. R., Wierzbinski, C. M. & Kram, R. Metabolic cost of running barefoot versus shod: is lighter better?. Med. Sci. Sports Exerc. 44, 1519–1525. https://doi.org/10.1249/MSS.0b013e3182514a88 (2012).
Yong, J. R. et al. Foot strike pattern during running alters muscle-tendon dynamics of the gastrocnemius and the soleus. Sci. Rep. 10, 5872. https://doi.org/10.1038/s41598-020-62464-3 (2020).
Ekizos, A., Santuz, A. & Arampatzis, A. Transition from shod to barefoot alters dynamic stability during running. Gait Posture 56, 31–36. https://doi.org/10.1016/j.gaitpost.2017.04.035 (2017).
Fleming, N., Walters, J., Grounds, J., Fife, L. & Finch, A. Acute response to barefoot running in habitually shod males. Hum. Mov. Sci. 42, 27–37. https://doi.org/10.1016/j.humov.2015.04.008 (2015).
Warne, J. P. et al. Kinetic changes during a six-week minimal footwear and gait-retraining intervention in runners. J. Sports Sci. 35, 1538–1546. https://doi.org/10.1080/02640414.2016.1224916 (2017).
McMahon, T. A. & Cheng, G. C. The mechanics of running: how does stiffness couple with speed?. J. Biomech. 23(Suppl 1), 65–78. https://doi.org/10.1016/0021-9290(90)90042-2 (1990).
Dalleau, G., Belli, A., Bourdin, M. & Lacour, J. R. The spring-mass model and the energy cost of treadmill running. Eur. J. Appl. Physiol. Occup. Physiol. 77, 257–263. https://doi.org/10.1007/s004210050330 (1998).
Cavagna, G. A., Saibene, F. P. & Margaria, R. Mechanical work in running. J. Appl. Physiol. 19, 249–256. https://doi.org/10.1152/jappl.1964.19.2.249 (1964).
Butler, R. J., Crowell, H. P. 3rd. & Davis, I. M. Lower extremity stiffness: Implications for performance and injury. Clin. Biomech. (Bristol, Avon) 18, 511–517. https://doi.org/10.1016/s0268-0033(03)00071-8 (2003).
Nishida, K., Hagio, S., Kibushi, B., Moritani, T. & Kouzaki, M. Comparison of muscle synergies for running between different foot strike patterns. PLoS ONE 12, e0171535. https://doi.org/10.1371/journal.pone.0171535 (2017).
Moore, I. S., Jones, A. M. & Dixon, S. J. Relationship between metabolic cost and muscular coactivation across running speeds. J. Sci. Med. Sport 17, 671–676. https://doi.org/10.1016/j.jsams.2013.09.014 (2014).
Tam, N., Tucker, R., Santos-Concejero, J., Prins, D. & Lamberts, R. P. Running Economy: Neuromuscular and joint stiffness contributions in trained runners. Int. J. Sports Physiol. Perform. https://doi.org/10.1123/ijspp.2018-0151 (2018).
Tam, N., Santos-Concejero, J., Coetzee, D. R., Noakes, T. D. & Tucker, R. Muscle co-activation and its influence on running performance and risk of injury in elite Kenyan runners. J. Sports Sci. 35, 175–181. https://doi.org/10.1080/02640414.2016.1159717 (2017).
Bovalino, S. P. et al. Change in foot strike patterns and performance in recreational runners during a road race: A cross-sectional study. J. Sci. Med. Sport 23, 621–624. https://doi.org/10.1016/j.jsams.2019.12.018 (2020).
Lussiana, T., Hebert-Losier, K., Millet, G. P. & Mourot, L. Biomechanical changes during a 50-minute run in different footwear and on various slopes. J. Appl. Biomech. 32, 40–49. https://doi.org/10.1123/jab.2015-0108 (2016).
Vercruyssen, F., Tartaruga, M., Horvais, N. & Brisswalter, J. Effects of footwear and fatigue on running economy and biomechanics in trail runners. Med. Sci. Sports Exerc. 48, 1976–1984. https://doi.org/10.1249/MSS.0000000000000981 (2016).
Wasserman, K., Hansen, J. E., Sue, A. Y., Whipp, B. J. & Casaburi, R. Principles of Exercise Testing and Interpretation 2nd edn, 479 (Lippincott Williams & Wilkins, 1994).
Astrand, P. O. Textbook of Work Physiology 2nd edn. (McGraw-Hill Publishing Co., 1986).
Cavagna, G. A. Force platforms as ergometers. J. Appl. Physiol. 39, 174–179. https://doi.org/10.1152/jappl.1975.39.1.174 (1975).
Nardello, F., Ardigo, L. P. & Minetti, A. E. Measured and predicted mechanical internal work in human locomotion. Hum. Mov. Sci. 30, 90–104. https://doi.org/10.1016/j.humov.2010.05.012 (2011).
Willems, P. A., Cavagna, G. A. & Heglund, N. C. External, internal and total work in human locomotion. J. Exp. Biol. 198, 379–393 (1995).
Morin, J. B., Dalleau, G., Kyrolainen, H., Jeannin, T. & Belli, A. A simple method for measuring stiffness during running. J. Appl. Biomech. 21, 167–180. https://doi.org/10.1123/jab.21.2.167 (2005).
De Wit, B., De Clercq, D. & Aerts, P. Biomechanical analysis of the stance phase during barefoot and shod running. J. Biomech. 33, 269–278. https://doi.org/10.1016/s0021-9290(99)00192-x (2000).
Willson, J. D. et al. Short-term changes in running mechanics and foot strike pattern after introduction to minimalistic footwear. PM R 6, 34–43. https://doi.org/10.1016/j.pmrj.2013.08.602 (2014) (quiz 43).
Hermens, H. J., Freriks, B., Disselhorst-Klug, C. & Rau, G. Development of recommendations for SEMG sensors and sensor placement procedures. J Electromyogr. Kinesiol. 10, 361–374. https://doi.org/10.1016/s1050-6411(00)00027-4 (2000).
Peterson, D. S. & Martin, P. E. Effects of age and walking speed on coactivation and cost of walking in healthy adults. Gait Posture 31, 355–359. https://doi.org/10.1016/j.gaitpost.2009.12.005 (2010).
Borg, G. Psychophysical scaling with applications in physical work and the perception of exertion. Scand. J. Work Environ. Health 16(Suppl 1), 55–58. https://doi.org/10.5271/sjweh.1815 (1990).
Ekelund, L. G. Circulatory and respiratory adaptation during prolonged exercise of moderate intensity in the sitting position. Acta Physiol. Scand. 69, 327–340. https://doi.org/10.1111/j.1748-1716.1967.tb03529.x (1967).
Hagberg, J. M., Mullin, J. P. & Nagle, F. J. Oxygen consumption during constant-load exercise. J. Appl. Physiol. Respir. Environ. Exerc. Physiol. 45, 381–384. https://doi.org/10.1152/jappl.1978.45.3.381 (1978).
Farina, D. Interpretation of the surface electromyogram in dynamic contractions. Exerc. Sport Sci. Rev. 34, 121–127. https://doi.org/10.1249/00003677-200607000-00006 (2006).
Hunter, I. & Smith, G. A. Preferred and optimal stride frequency, stiffness and economy: Changes with fatigue during a 1-h high-intensity run. Eur. J. Appl. Physiol. 100, 653–661. https://doi.org/10.1007/s00421-007-0456-1 (2007).
Squadrone, R. & Gallozzi, C. Biomechanical and physiological comparison of barefoot and two shod conditions in experienced barefoot runners. J. Sports Med. Phys. Fitness 49, 6–13 (2009).
Squadrone, R., Rodano, R., Hamill, J. & Preatoni, E. Acute effect of different minimalist shoes on foot strike pattern and kinematics in rearfoot strikers during running. J. Sports Sci. 33, 1196–1204. https://doi.org/10.1080/02640414.2014.989534 (2015).
Cavagna, G. A. The landing-take-off asymmetry in human running. J. Exp. Biol. 209, 4051–4060. https://doi.org/10.1242/jeb.02344 (2006).
Ardigo, L. P., Lafortuna, C., Minetti, A. E., Mognoni, P. & Saibene, F. Metabolic and mechanical aspects of foot landing type, forefoot and rearfoot strike, in human running. Acta Physiol. Scand. 155, 17–22. https://doi.org/10.1111/j.1748-1716.1995.tb09943.x (1995).
Lieberman, D. E., Warrener, A. G., Wang, J. & Castillo, E. R. Effects of stride frequency and foot position at landing on braking force, hip torque, impact peak force and the metabolic cost of running in humans. J. Exp. Biol. 218, 3406–3414. https://doi.org/10.1242/jeb.125500 (2015).
Hreljac, A., Marshall, R. N. & Hume, P. A. Evaluation of lower extremity overuse injury potential in runners. Med. Sci. Sports Exerc. 32, 1635–1641. https://doi.org/10.1097/00005768-200009000-00018 (2000).
Ceyssens, L., Vanelderen, R., Barton, C., Malliaras, P. & Dingenen, B. Biomechanical risk factors associated with running-related injuries: A systematic review. Sports Med. 49, 1095–1115. https://doi.org/10.1007/s40279-019-01110-z (2019).
Malisoux, L., Gette, P., Delattre, N., Urhausen, A. & Theisen, D. Spatiotemporal and ground-reaction force characteristics as risk factors for running-related injury: A secondary analysis of a randomized trial including 800+ recreational runners. Am. J. Sports Med. 50, 537–544. https://doi.org/10.1177/03635465211063909 (2022).
Tam, N., Darragh, I. A. J., Divekar, N. V. & Lamberts, R. P. Habitual minimalist shod running biomechanics and the acute response to running barefoot. Int. J. Sports Med. 38, 770–775. https://doi.org/10.1055/s-0043-114863 (2017).
Rice, H. M., Jamison, S. T. & Davis, I. S. Footwear matters: Influence of footwear and foot strike on load rates during running. Med Sci. Sports Exerc. 48, 2462–2468. https://doi.org/10.1249/MSS.0000000000001030 (2016).
Altman, A. R. & Davis, I. S. A kinematic method for footstrike pattern detection in barefoot and shod runners. Gait Posture 35, 298–300. https://doi.org/10.1016/j.gaitpost.2011.09.104 (2012).
Acknowledgements
This study was supported by the University of Lausanne (Switzerland). The authors warmly thank the participants for their time and cooperation.
Funding
No funding was received for this study.
Author information
Authors and Affiliations
Contributions
Conceptualization, J.H., M.C. and D.M.; methodology, J.H., M.C. and D.M.; investigation, J.H., M.C. and D.M.; formal analysis, G.U., A.F.M., J.H., M.C. and D.M.; writing—original draft preparation, G.U and D.M.; writing—review and editing, G.U., A.F.M., J.H., M.C. and D.M.; supervision, G.U., A.F.M., J.H., M.C. and D.M. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Udin, G., Fernandez Menendez, A., Hoyois, J. et al. Time course of muscle activation, energetics and mechanics of running in minimalist and traditional cushioned shoes during level running. Sci Rep 13, 5007 (2023). https://doi.org/10.1038/s41598-023-31984-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-31984-z
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
