
Abstract
In some wireless charging applications where the coil spacing varies in real time, such as UAV, electric boat and tram, etc., the traditional direct impedance matching method is difficult to identify the mutual inductance timely and accurately, thus affecting the efficiency optimization effect of the system. In this paper, an indirect impedance matching method without parameter identification is proposed, this method is based on the characteristic that the optimal voltage gain of the resonator is only related to its inherent parameters, and impedance matching can be achieved by controlling the voltage gain in real time. To further improve the efficiency of the system, a single-sided detuning design method is used to achieve soft switching of the inverter. Based on the optimal voltage gain expression derived by using both the indirect impedance matching method and the single-sided detuning design method, a compound control strategy for a series-series-compensated topology with dual-side power control is proposed to improve efficiency and stabilize the output voltage. A hardware prototype is built and a peak DC-to-DC efficiency with the optimal output resistance RL at about 28.9 Ω is 91.58%. When the output resistance RL is 100 Ω, the efficiency improved by 7% after using the proposed strategy.
Similar content being viewed by others
Introduction
Over the past two decades, many studies have described the need to use new energy technologies due to the increase in greenhouse gas emissions and the use of electricity in non-renewable fuels1,2. New energy electric vehicles came into being3,4, but the charging technology of new energy electric vehicles is a difficult problem. Compared with the traditional conductive charger, the MCR-WPT system has the advantages of flexibility, convenience, safety and reliability5,6,7,8, because it eliminates the need for charging cables. In addition, wireless power transmission technology is also widely used in underwater equipments, implantable medical equipments, drones and other fields9,10,11,12,13.
MCR-WPT system transfers power between the primary coil and the secondary coil, which are magnetically coupled and require the employment of compensation capacitors to resonate with them. The most established topology for MCR-WPT is the series-compensated primary and secondary coil, with the advantages of high resonant frequency stability, low system cost and low control complexity, etc. In literature, the researches on MCR-WPT system mostly focus on analyzing the characterization of this system, especially the efficiency characterization14,15,16.
The overall efficiency of an MCR-WPT system largely depends on the losses that incur in converters and coupling coils. In case of the former, many studies have been reported in relation to the development of converter topologies17,18, soft-switching technology19,20,21 and synchronous rectification technology22. In case of the latter, studies focus on the optimization of the coil structure23,24 and the impedance matching method to maintain efficient operation of the resonator in response to dynamic changes in load and mutual inductance. The conventional direct impedance matching method requires mutual inductance and load identification, which makes the system complicated. The AC equivalent resistance of the rectifier is modulated to an optimal value by using an active rectifier25 or a secondary-side cascaded DC–DC converter26,27. In addition, a communication link is needed to obtain the information of the secondary side output voltage, so that the inverter or the primary side DC–DC converter can adjust the output voltage. An indirect impedance matching strategy is implemented in28 which uses the secondary side cascaded DC–DC converter to control the output voltage and the primary side cascaded DC–DC converter to track the minimum DC input current instead of the maximum efficiency, which indirectly achieves impedance matching. However, this method is a global search method, and the search process is usually slow.
This paper proposes an optimal voltage gain modulation method to minimize the coil losses by controlling the voltage gain in real time. The advantage of this modulation method is that no parameter identification is required, as the optimal voltage gain of the resonator is only related to its inherent parameters. In addition, the inverter power losses are also improved by using single-sided detuning design method. From these analyses, a compound control strategy for a series-series-compensated topology with dual-side power control is proposed to improve efficiency and stabilize the output voltage. Compared with the conventional direct impedance matching strategy, the proposed strategy can achieve impedance matching without parameter identification (M, RL), which simplifies the hardware design and control difficulty of the system. In addition, the system has high operation reliability and good output dynamic characteristics. The analysis is based on a secondary-side cascaded Boost converter and an input DC voltage power control method, which has a wider power control range than the phase-shifted full-bridge method29. A hardware laboratory prototype of 100 V output voltage MCR-WPT system is implemented to investigate the behavior of the proposed strategy. The experimental results show the efficacy of the proposed strategy.
Result
Prposed topology and single-sided detuning design analysis
Proposed topology and working principle
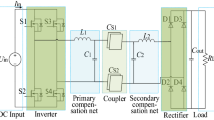
In Fig. 1,the proposed series-series-compensated MCR-WPT system structure with a secondary-side cascaded Boost converter is depicted, involving DC power supply module, inverter, resonator, rectifier and Boost converter. The DC power supply module rectifies the AC grid voltage into DC, and then outputs the corresponding VDC after DC/DC converter as the input voltage of the WPT system. The DC power supply module is not investigated in detail in this paper because it is a standard component and can be designed mostly independently from the other components of the WPT system. The nominal efficiency of the DC power supply module can be assumed to be in the range of 97% to 98%, or even higher for more complex topologies30,31. For the convenience of analysis, the AC power grid and DC power supply module at the front end of the inverter are simplified to an adjustable DC power supply, as shown in Fig. 2. Boost converters have simple structure, high reliability and high achievable efficiency32,33,34. The losses of the DC power supply module and Boost converter are no longer considered in this paper. It is worth noting that the DC power supply module and secondary side cascaded Boost converter offer the possibility of implementing the dual target control of this paper. u1(i1) is the inverter output voltage(current), u2(i2) is the rectifier input voltage (current), Vin (Iin) is the Boost converter input voltage (current), Vo (Io) is the output voltage (current). RL is the output resistance, Rin is the Boost converter input equivalent resistance, Re is the rectifier input equivalent resistance, R1 and R2 are the internal resistance of the primary coil and secondary coil respectively.

SS-type MCR-WPT system structure with cascaded Boost converter.

Simplified diagram of system structure.
To describe the basic behavior of a series-series-compensated WPT system, first-order analysis (FOA) is performed first, and all higher harmonics and losses are neglected35. In Fig. 3, ω is the operating angular frequency, \(\mathop {U_{1} }\limits^{ \bullet }\) is the fundamental phasor of inverter output voltage u1, \(\mathop {U_{2} }\limits^{ \bullet }\) is the fundamental phasor of rectifier input voltage u2, and \(\mathop {I_{1} }\limits^{ \bullet } \left( {\mathop {I_{2} }\limits^{ \bullet } } \right)\) is the fundamental phasor of primary side current (secondary side current).

System equivalent circuit phasor model.
The system loop voltage equations:
where Z11 and Z22 are the self-impedances of the primary and secondary sides, ZM is the mutual impedance, Z11 = R1 + jωL1 + 1/jωC1, Z22 = R2 + jωL2 + 1/jωC2, ZM = jωM.
Solve for the loop currents:
The resonant frequency of the primary side is \(1/\sqrt {L_{1} C_{1} }\), and the resonant frequency of the secondary side is \(1/\sqrt {L_{2} C_{2} }\). To reduce the reactive power, both the primary and secondary sides are usually in the resonant state, the resonant frequencies of both sides are the same and equal to the working frequency ω:
Now, Z11 = R1, Z22 = R2, ZM = jωM, substituting into Eq. (2) to simplify:
Assuming that \(\mathop {U_{1} }\limits^{ \bullet }\) = U1∠0°,the primary side current \(\mathop {I_{1} }\limits^{ \bullet }\) is in phase with the inverter output voltage \(\mathop {U_{1} }\limits^{ \bullet }\), the system impedance angle φ1 is 0°, and the inverter cannot realize soft switching. The coil internal resistance R1 and R2 are much smaller than ωM, and the RMS of the secondary side current \(\mathop {I_{2} }\limits^{ \bullet }\) can be approximated as:
When the equivalent resistance Re changes, the secondary side current is almost constant. The voltage gain GV of the resonator can be approximated as:
The voltage gain GV is approximately proportional to the equivalent resistance Re. The transmission efficiency expression is as follows:
Single-sided detuning design
In order to achieve soft switching of the inverter and simplify the analysis, a single-sided detuning design methed is used in this paper. Define the detuning rate μ:
where ZC and ZL are the capacitive reactance and inductive reactance of the detuning side, ZC = 1/jωC and ZL = jωL. It is necessary to analyze the sensitivity of the system impedance angle to the disturbance of the detuning rate μ, as well as the influence when subjected to a wide range of load changes. In addition, the constant current characteristics of the secondary side should also be maintained as much as possible.
When the primary side is resonant and the secondary side is detuned, the inverter operating frequency ω is equal to the primary side resonance frequency:
Now, Z11 = R1, Z22 = R2 + jωL2μ, ZM = jωM, substituting into Eq. (2) to simplify:
The system input impedance angle φ1 is:
And the RMS of the secondary current \(\mathop {I_{2} }\limits^{ \bullet }\) can be approximated as:
From Eq. (11), it can be seen that when detuning rate μ < 0, the system impedance angle φ1 > 0 and the input port of the resonator is inductive. When Re is large, since the ωL2R1 component is relatively small, the detuning rate μ and the equivalent resistance Re have non-direct effects on the system impedance angleφ1, and φ1 is little sensitive to the detuning rate μ perturbation and is little affected by the wide range of variations of the equivalent resistance Re. Further, since the coil internal resistance R1, R2 and detuning rate μ are all of order 10–1, which is much smaller than ωM, according to Eq. (12), the detuning rate μ has little effect on the secondary current I2, and the secondary side is still approximately constant current. Figure 4 shows the change curve of the system impedance angle φ1 and the secondary side current I2 with the equivalent resistance Re under different detuning ratios μ when the secondary side is detuned.

System impedance angle and secondary current when the secondary side is detuned.
The voltage gain GV can be approximated as:
The voltage gain GV is still approximately proportional to the equivalent resistance Re under the secondary side detuning design. The transmission efficiency expression is as follows:
When the primary side is detuned and the secondary side is resonant, the inverter operating frequency ω is equal to the secondary resonant frequency:
Now, Z11 = R1 + jωL1μ, Z22 = R2, ZM = jωM, substituting into Eq. (2) to simplify:
The system input impedance angle φ1 is:
And the RMS of the secondary current \(\mathop {I_{2} }\limits^{ \bullet }\) is:
It can be seen from Eq. (17) that under the primary side detuning design, when the detuning rate μ > 0, the system impedance angle φ1 > 0. Since the ωL1 (R2 + Re) component is large, a slight Δμ can cause a large change in φ1. The system impedance angle φ1 is very sensitive to the disturbance of the detuning rate μ and is greatly affected by the change of the equivalent load Re. Analysis of Eq. (18) shows that, again, due to the large component ωL1 (Re + R2), the sensitivity of the secondary current I2 to the detuning rate μ perturbation is high, and the change of equivalent resistance Re also has a large effect on I2. Figure 5 shows the change curve of the system impedance angleφ1 and the secondary side current I2 with the equivalent resistance Re under different detuning ratios μ when the primary side is detuned.

System impedance angle and secondary current when the primary side is detuned.
Comparing Figs. 4 and 5, combined with the above theoretical analysis, there are conclusions: (1) Under the same equivalent resistance Re, |μ| increases, |φ1| increases, and the system reactive component increases, so |μ| should be as small as possible under the premise that soft switching can be achieved within the range of load variation. (2) Under the secondary side detuning design, the system impedance angle φ1 can be weakly inductive over a larger range of equivalent resistance variations, and is less affected by equivalent resistance variations and detuning rate disturbances, making the soft switching characteristics more stable. (3) Under the secondary side detuning design, the secondary current I2 is less affected by the detuning rate μ. When the internal resistance R1 of the primary coil is very small, the secondary current is approximately constant. In summary, this paper adopts a secondary side detuning design with better soft switching characteristics and secondary current characteristics. In addition, when the parameters of the primary side cannot be accurately configured, the primary side can be resonated by fine-tuning the operating frequency of the system.
Maximum efficiency tracking principle and compound control strategy
Maximum efficiency tracking principle
From the expression (7) for the transmission efficiency at full resonance on both sides, as η is a function of Re, it can be maximized by adjusting the equivalent resistance Re to the optimal value \({\mathop R\limits^{ \circ }}_{{{\text{e-opt}}}}\)19:
Substituting \({\mathop R\limits^{ \circ }}_{{{\text{e-opt}}}}\) into the approximate expression (6) of voltage gain, the optimal voltage gain \({\mathop G\limits^{ \circ }}_{{{\text{v-opt}}}}\) at full resonance on both sides is obtained:
It can be seen that when both sides are resonant, the transmission efficiency η reaches the maximum when the equivalent resistance is the optimal value \({\mathop R\limits^{ \circ }}_{{{\text{e-opt}}}}\). The value of \({\mathop R\limits^{ \circ }}_{{{\text{e-opt}}}}\) is not only related to the fixed parameter of the resonator, but also to the variable parameter of mutual inductance M. But the optimal voltage gain \({\mathop G\limits^{ \circ }}_{{{\text{v-opt}}}}\) at maximum transmission efficiency is only related to the fixed parameters (R1, R2) of the resonator.
From the expression (14) for the transmission efficiency η under the secondary side detuning design is also a function of Re, since the expression of Re-opt is too complicated, the relationship between the transmission efficiency η, the optimal equivalent resistance Re-opt and the detuning rate μ is analyzed according to the data in Table 1.
As shown in Fig. 6, the η–Re curves can be visually examined under different detuning rate μ(μ < 0) when the secondary side is detuned. The larger the |μ|, the larger the Re-opt, and the smaller the corresponding maximum transmission efficiency ηmax.

Efficiency–equivalent resistance curve under different detuning ratio μ.
The detuning design will sacrifice resonator efficiency while realizing soft switching. Therefore, under the premise of realizing soft switching within the range of resistance variation, |μ| should be as small as possible so that the maximum efficiency ηmax of the resonator can be as large as possible. The secondary side is detuned with μ < 0, so μ is taken between [− 0.2, 0] at 0.01 intervals. In the following, we will investigate the relationship between the optimal equivalent resistance Re-opt and the optimal voltage gain GV-opt with respect to the detuning rate μ under the secondary side detuning design. Table 2 shows the Re-opt values under different μ.
Plot the scatter Fig. 7, the relationship between Re-opt and μ is approximately linear. In fact, it has been verified that after changing the system parameters in Table 1, such as the values of L1(L2), R1(R2), and M, there is still an approximate linear relationship between the optimal equivalent resistance Re-opt and the detuning rate μ, which will not be repeated here.

Linear fitting curve of Re-opt with respect to μ.
The expression fitted using the linear model is given by:
Assuming full resonance on both sides, the actual value \({\mathop R\limits^{ \circ }}_{{{\text{e-opt}}}}\) of the optimal equivalent resistance is equal to the fitted value \({\mathop R\limits^{*}}_{{{\text{e-opt}}}} |_{\mu = 0}\).
Then the fitting value \({\mathop R\limits^{*}}_{{{\text{e-opt}}}}\) of the optimal equivalent resistance under different detuning rate μ has the following relationship with the actual value \({\mathop R\limits^{ \circ }}_{{{\text{e-opt}}}}\) at full resonance on both sides:
Combined with the analytical expression (19) of \({\mathop R\limits^{ \circ }}_{{{\text{e-opt}}}}\), the analytical expression of \({\mathop R\limits^{*}}_{{{\text{e-opt}}}}\) under different μ is obtained:
Substituting expression (24) into the voltage gain approximation expression (13) under the secondary side detuning design, the optimal voltage gain \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\) expression under different μ is obtained:
It can be seen that the secondary side detuning design has the same law as the full resonance design on both sides when the transmission efficiency is maximum—the corresponding optimal equivalent resistance is not only related to the fixed parameters of the sysytem (R1, R2, μ, ω), but also to the variable parameter of mutual inductance M; and the optimal voltage gain is only related to the fixed parameters of the resonator (R1, R2, μ), thus obtaining the basis for impedance matching.
The traditional direct impedance matching technology uses a secondary side converter or an active rectifier to modulate the equivalent resistance to the optimal value \({\mathop R\limits^{*}}_{{{\text{e-opt}}}}\), which needs to identify the mutual inductance M and the load RL. This paper indirectly realizes impedance matching by controlling the voltage gain to the optimal value \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\) in real time, without mutual inductance and load identification.
Compound control analysis of voltage regulation and maximum efficiency tracking
In practical applications, in addition to maximum efficiency tracking, the output performance requirements should also be guaranteed. In this paper, the inverter is kept on 180° complementary conduction and two control variables are provided using an adjustable DC power supply and a secondary-side cascaded Boost converter.
In the traditional direct impedance matching strategy, the secondary side Boost converter is used to modulate the equivalent resistance Re to the optimal value \({\mathop R\limits^{*}}_{{{\text{e-opt}}}}\), which needs to identify the mutual inductance M and the load RL, the system hardware design and control are complex, and the identification accuracy is difficult to ensure, which further affects the optimization effect of the system efficiency, and the primary side adjustable DC power supply is used to output voltage stabilization, When the communication between the primary side and the secondary side fails, the whole system will no longer work safely. In this paper, the secondary side Boost converter is used to output voltage stabilization, and the the primary side adjustable DC power supply is used for coordinated control to make the voltage gain an optimal value \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\) to indirectly realize impedance matching.
The relationship between the RMS value U1 of the inverter output voltage \(\mathop {U_{1} }\limits^{ \bullet }\) and the value VDC of the adjustable DC power supply can be expressed as:
Similarly, the relationship between the RMS value U2 of the rectifier input voltage \(\mathop {U_{2} }\limits^{ \bullet }\) and the Boost converter input voltage Vin can be expressed as:
Control the VDC to make the voltage gain the optimal value \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\) [Eq. (25)]:
The change of the adjustable DC source VDC will further affect the output voltage Vo. Combining with the voltage transformation relationship of Boost, the relationship between Vo and VDC and the Boost duty cycle D is obtained:
Obviously, the output voltage Vo is not only affected by the control variable VDC, but also by the duty cycle D.
The duty cycle D of the Boost converter can not only transform the voltage, but also transform the impedance. Combining the impedance transformation of the rectifier and Boost converter, the relationship between the rectifier input equivalent resistance Re and the output resistance RL can be obtained as follows:
Based on the foregoing analysis, the transmission efficiency is only affected by the equivalent resistance Re (Namely, the duty cycle D), so the voltage regulation control and the maximum efficiency tracking control can operate independently and decoupled from each other.
When the resonator voltage gain is optimal, the transmission efficiency is the maximum, and the equivalent resistance must also be the optimal value \({\mathop R\limits^{*}}_{{{\text{e-opt}}}}\) [Eq. (24)], combined with the Eq. (30), the duty cycle D∞ of the Boost converter at maximum efficiency is
Substituting D∞ into Eq. (29), the adjustable DC source VDC∞ when the output voltage is regulated as Vo-ref is:
Figure 8 is a compound control loop diagram of voltage regulation and maximum efficiency tracking. When the output resistance RL changes, the collected output voltage Vo information is sent to the secondary controller to regulate the duty cycle D of Boost to make the output voltage stabilized as the reference value Vo-ref. The equivalent resistance Re varies with D. Since the SS-type resonator is a constant-current topology on the secondary side, the voltage gain must deviate from the optimal value \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\). Using wireless communication devices, the collected Boost input voltage information Vin is sent to the primary controller to regulate the adjustable DC power supply VDC so that the voltage gain is the optimal value \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\). And the change of VDC will affect Vo, so continue to regulate the duty cycle D to achieve voltage stabilization and regulate the adjustable DC power supply VDC to achieve optimal voltage gain \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\), and repeat the cycle continuously. When the output resistance RL satisfies the boundary conditions of the system control:

System control loop diagram.
This reciprocal dynamic coordinated control process eventually converges to a steady state, with D and VDC converging to the steady state values D∞ and VDC∞, respectively [see Eqs. (31) and (32)].
Obviously, compared with the traditional direct impedance matching strategy, the process of using the secondary-side cascaded Boost converter to stablilize the output voltage does not depend on communication equipments, and the system has high operating reliability and good output dynamic characteristics. The process of regulating the adjustable DC power supply VDC to achieve optimal voltage gain for maximum efficiency tracking, without parameter identification (M, RL), simplifies the system hardware design and control difficulties, and is suitable for the scenes of real-time changes in coil spacing and load.
Simulation and experimental verification
Simulation verification
In order to verify the correctness of the theoretical analysis in this paper, a SS-WPT system platform with an adjustable DC power supply and a secondary-side cascaded Boost converter is built through Simulink, and the resonator parameters are shown in Table 1. Under the premise of realizing soft switching within the range of load variation, |μ| should be as small as possible so that the maximum efficiency ηmax of the resonator can be as large as possible. As seen in Fig. 9, when the detuning rate μ = − 0.06 (C2 = 36.8 nF)and the equivalent resistance Re varies between [10,100) Ω, the system is in a weak inductance state, and the system impedance angle φ1 is between (− 15°, − 2°), which has the conditions to achieve ZVS and does not sacrifice unnecessary resonator efficiency due to excessive inductance. Figure 9 shows the waveform of inverter output voltage u1 and current i1 when the load RL = 10 Ω and RL = 80 Ω, the inverter output current i1 both lag slightly behind the output voltage u1, and the resonant network is weakly inductive, thus realizing soft switching.

Inverter output voltage and current waveform.
Substituting μ = − 0.06 into Eq. (21), the optimal equivalent resistance \({\mathop R\limits^{*}}_{{{\text{e-opt}}}}\) can be obtained:
The corresponding optimal load RL-opt = 28.5 Ω. Figure 10 shows that when the system has no impedance matching, the simulation efficiency reaches the maximum near the load of 30 Ω, which further verifies the optimal load theory.

Simulation efficiency without impedance matching.
Figure 11 shows that the voltage gain Gv of the resonator increases approximately linearly with the load RL. When the optimal load RL-opt is 28.5 Ω, the voltage gain is 0.87.

Variation of resonator voltage gain with load value.
However, substituting the detuning rate μ = − 0.06 into the voltage gain model Eq. (25), the optimal voltage gain is
When controlling \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\) ≈ 1, the equivalent resistance Re ≈ 26Ω in simulation, and the matching error is about 3 Ω. The error between \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\) ≈ 1 obtained by the voltage gain model and Gv-opt = 0.87 obtained by simulation is about 0.13, which is because there are many approximations and assumptions in the derivation of the voltage gain model. In order to make the impedance matching more accurate, the optimal voltage gain Gv-opt = 0.87 obtained by simulation is used to formulate the indirect impedance matching strategy. Consider the boundary condition (33) of the system control, where a compound control strategy is applied to the system when RL ≥ 28.5 Ω and varies between [30, 100] Ω. Define the equivalent resistance matching deviation rate δ:
Figure 12 shows the variation curve of the equivalent resistance deviation rate δ with the output resistance RL. The maximum matching error is 0.23 Ω, |δ| < 0.01, and the matching accuracy is high.

Load matching deviation rate when RL changes.
The output voltage waveform when the load changes suddenly is shown in Fig. 13. Under the compound control, when t = 0.5 s, the RL suddenly drops from 80 to 40 Ω, Vo can be stabilized to 100 V again after 0.03 s with only 4% overshoot and the steady-state error is approximately 0, and the peak-to-peak output voltage ripple is 2 V.

Output voltage stabilized waveform.
The above are the simulation verifications when the coupling coefficient k is fixed (k = 0.31) and the output resistance RL is varied. Now we verify the control effect when RL = 80 Ω and k is varied between (0.1, 0.35) at 0.05 intervals (the mutual inductance M is varied between (16 μF, 52.5 μF). Under different k, the deviation rate δ of the equivalent resistance Re from the optimal value \({\mathop R\limits^{*}}_{{{\text{e-opt}}}}\) is shown in Fig. 14. The average deviation rate is 0.07, which shows that the matching effect is good when k varies widely.

Resistance matching deviation rate when k changes.
Figure 15 shows the comparison curves of the equivalent load deviation rate δ under two control strategies. The output resistance RL varies between [30,100] Ω. The green line is the deviation rate curve after direct impedance matching, and the blue line is the deviation rate curve after indirect impedance matching. Obviously, the accuracy of indirect impedance matching is higher, and the equivalent resistance Re is closer to the optimal equivalent load value \({\mathop R\limits^{*}}_{{{\text{e-opt}}}}\).

Comparison of load matching deviation rate.
Experimental verification
Based on the system control loop diagram given in Fig. 8 and the parameters shown in Table 1 (C2 is designed to be 36.8 nF when μ = − 0.06), the experimental platform shown in Fig. 15 was built to verify the effectiveness of the proposed compound control method.
In Fig. 16, the DC power supply model IT6006C of ITECH is used as an adjustable DC source. The load adopts a power resistance box of model RXF-DC400V 10 kW. The control chip is selected as TMS320F28335 DSP. The PA5000H power analyzer is used to measure the power and efficiency of the DC–DC terminal, that is, the overall system efficiency from the input adjustable DC power supply to the output DC load. The system loss includes the loss of the inverter, resonator, rectifier, and Boost converter. Using two oscilloscopes to record the inverter output and Boost converter input waveforms, respectively. The transmission coil is wound with Litz wire and and the distance between the coils is fixed at 10 cm (k = 0.31).

Experimental platform.
According to Eq. (34), the optimal equivalent resistance \({\mathop R\limits^{*}}_{{{\text{e-opt}}}}\) of system is 23.124 Ω, and the corresponding optimal output resistance RL-opt is 28.5 Ω. According to Eq. (35) the optimal voltage gain \({\mathop G\limits^{ * }}_{{{\text{v-opt}}}}\) obtained by modeling is 1, and the optimal voltage gain after simulation modification is 0.87. For the convenience of comparison, the Boost duty cycle D is set to 0 and the adjustable DC power supply VDC is regulated to make the system output voltage 100 V in the no-compound control experiment. When the output resistance RL is 29.6 Ω, the adjustable DC power supply VDC is 111.84 V, the Boost input voltage Vin is 102 V, and the voltage gain is 0.91. The simulation and experiment have good consistency. Figure 17 shows the screenshot of the power analyzer when RL = 29.6 Ω, and the waveforms of Boost input voltage Vin and duty cycle D.

Main data and waveforms without compound control when RL = 29.6 Ω.
Figure 18 shows the output voltage u1 and current i1 waveforms of the inverter. The system is weakly inductive and has the conditions to realize soft switching.

Inverter soft switching waveform.
Figure 19 shows the screenshots of the power analyzer and the waveforms of Boost input voltage Vin and duty cycle D under compound control when the output resistance RL = 60 Ω as well as RL = 90 Ω. Under the system 100 V constant voltage control, the optimal voltage gain of 0.87 is used for maximum efficiency tracking.

Main data and waveforms when RL = 60 Ω, RL = 90 Ω.
It can be seen from Fig. 19b and c that under compound control, when RL = 60 Ω, the output voltage Vo is stable at 100.23 V, while the adjustable DC source VDC is 80.16 V, the Boost input voltage Vin is 70.6 V, and the voltage gain is 0.88. Comparing the screenshots Fig. 19a and b of the power analyzer, the efficiency of the DC–DC terminal has increased from 88.11 to 91.04% after the compound control.
Similarly, as seen in Fig. 19e and f, under compound control, when RL = 90 Ω, Vo = 100.13 V, VDC = 65.47 V, Vin = 57.3 V, and the voltage gain is 0.88, Comparing the screenshots Fig. 19d and e of the power analyzer, the efficiency of the DC to DC terminal has increased from 84.44 to 91.08% after the compound control. Under compound control, when RL changes from 60 to 90 Ω, compare Fig. 19b and e, the adjustable DC source VDC drops from 80.16 to 65.47 V; compare Fig. 19c and f, Boost duty cycle D rises from 31.4 to 37.7%. Figure 20 shows the voltage gain of the resonator when the output resistance RL changes between [40, 100] Ω under compound control, fluctuating between 0.87 and 0.9.

Voltage gain under compound control.
Figure 21 shows that the efficiency of the DC–DC terminal before and after the compound control when the output resistance RL is varied between [40, 100] Ω. The more the RL deviates from the optimal value, the more significant the efficiency improvement is. When RL = 100 Ω, the efficiency of the system is optimized from 83 to 90.73% after the compound control, an improvement of 7 points, verifying the effectiveness of indirect impedance matching using voltage gain.

Transmission efficiency comparison chart.
Figure 22 shows the duty cycle D∞ of the Boost converter after compound control stabilization. The output resistance RL increases, the corresponding D∞ increases from Eq. (31), the experimental results are consistent with the theoretical analysis.

Boost duty cycle D under compound control.
Figure 23 shows the output voltage Vo and the adjustable DC power supply VDC∞ after compound control stabilization. Under various loads, the output voltage Vo is stable at 100 V. As RL increases, D∞ increases, the output voltage Vo is fixed when the adjustable DC source VDC∞ from the Eq. (32) becomes smaller, the experimental results are consistent with the theoretical analysis.

Output voltage and adjustable input voltage under compound control.
Conclusion
Aiming at the problem that conventional direct impedance matching method requires mutual inductance and load identification, which makes the system complicated, this paper proposes an optimal voltage gain modulation without parameter identification to indirectly achieves impedance matching. The main contributions are as follows.
-
(1)
A single-sided detuning design method used to achieve soft switching of the inverter is analyzed. This paper adopts a secondary side detuning design with better soft switching characteristics and secondary current characteristics.
-
(2)
The principle of maximum efficiency tracking is analyzed, and the optimal equivalent resistance Re-opt and the optimal voltage gain GV-opt are derived when both the soft switching of the inverter and the impedance matching of the resonator are realized. The optimal voltage gain GV-opt is only related to the fixed parameters of the resonator (R1, R2, μ), thus obtaining a method for maximum efficiency tracking without parameter identification.
-
(3)
Based on the secondary-side cascaded Boost converter and the adjustable DC power supply, this paper proposes a compound control strategy for a series-series-compensated topology with dual-side power control to improve efficiency and stabilize the output voltage. The dynamic coordination process of indirect impedance matching control is described in detail, and the control premise (decoupling condition of two control degrees of freedom), control result (steady state value) and control effect are analyzed.
The experimental results show that when the optimal voltage gain Gv-opt = 0.87 is utilized to achieve indirect impedance matching, the efficiency of system remains around 91% when the output resistance RL is varied between [40, 100] Ω. The optimal output resistance RL-opt = 29.6 Ω, when RL = 100 Ω, the efficiency is improved by nearly 7%. Therefore, the control method proposed in this paper is feasible and effective, especially suitable for the scenarios of real-time changes in coil spacing and load.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Mehrpooya, M., Ghadimi, N., Marefati, M. & Ghorbanian, S. A. Numerical investigation of a new combined energy system includes parabolic dish solar collector, stirling engine and thermoelectric device. Int. J. Energy Res. 45(11), 16436–16455. https://doi.org/10.1002/er.6891 (2021).
Dehghani, M. et al. Blockchain-based securing of data exchange in a power transmission system considering congestion management and social welfare. Sustainability 13(1), 90. https://doi.org/10.3390/su1301009010.3390/su13010090 (2020).
Yang, Z. et al. Robust multi-objective optimal design of islanded hybrid system with renewable and diesel sources/stationary and mobile energy storage systems. Renew. Sustain. Energy Rev. 148, 111295. https://doi.org/10.1016/j.rser.2021.111295 (2021).
Liu, J., Chen, C., Liu, Z., Jermsittiparsert, K. & Ghadimi, N. An IGDT-based risk-involved optimal bidding strategy for hydrogen storage-based intelligent parking lot of electric vehicles. J. Energy Storage 27, 101057. https://doi.org/10.1016/j.est.2019.101057 (2020).
Hui, S. Y. R., Zhong, W. & Lee, C. K. A critical review of recent progress in mid-range wireless power transfer. IEEE Trans. Power Electron. 29(9), 4500–4511 (2014).
Franceschetti, G. & Gervasio, V. Wireless power transmission: A new science is borne. in 2012 IEEE MTT-S International Microwave Workshop Series on Innovative Wireless Power Transmission: Technologies, Systems, and Applications, 21–23 (2012).
Treffers, M. History, current status and future of the wireless power consortium and the qi interface specification. in IEEE Circuits and Systems Magazine, vol. 15, no. 2, 28–31 (2015).
Andrei, M., Claudiu, B. & Vadan, I. Wireless power transmission: state of the art and applications. in 2019 8th International Conference on Modern Power Systems (MPS), 1–6 (2019).
Manikandan, J. et al. Design and development of contactless battery charger for underwater vehicles. Michael Faraday IET Int. Summit 2015, 362–367 (2015).
Pokharel, R. K. et al. Wireless power transfer system rigid to tissue characteristics using metamaterial inspired geometry for biomedical implant applications. Sci. Rep. 11, 5868. https://doi.org/10.1038/s41598-021-84333-3 (2021).
Campi, T. et al. Magnetic field levels in drones equipped with wireless power transfer technology. Asia-Pac. Int. Symp. Electromagn. Comp. (APEMC) 2016, 544–547 (2016).
Ahmad, A., Alam, M. S. & Chabaan, R. A comprehensive review of wireless charging technologies for electric vehicles. IEEE Trans. Transp. Electr. 4(1), 38–63 (2018).
Omori, H., Morizane, T. S., Nakaoka, M. & Kimura, N. A wireless vehicle to home system with resonant IPT bidirectional single-ended inverter for smart house. Int. Conf. Intell. Green Build. Smart Grid (IGBSG) 2014, 1–4 (2014).
Aditya, K. & Williamson, S. S. Comparative study of series-series and series-parallel compensation topologies for electric vehicle charging. In Proceeding IEEE 23rd International Symposium Industrial Electron, 426–430 (2014).
Qi, P. et al. The characteristic analysis of magnetically coupled resonant wireless power transmission based on SS compensation structure. First Int. Conf. Electron. Instrum. Inf. Syst. (EIIS) 2017, 1–4. https://doi.org/10.1109/EIIS.2017.8298636 (2017).
Li, Y. et al. High efficiency WPT system for electric vehicles with LCL-S and SS compensation. in 2019 IEEE 4th International Future Energy Electronics Conference (IFEEC), 1–4 (2019). https://doi.org/10.1109/IFEEC47410.2019.9015165.
Nguyen, X. B., Vilathgamuwa, D. M. & Madawala, U. K. A SiC based matrix converter topology for inductive power transfer system. IEEE Trans. Power Elect. 29(8), 4029–4038 (2014).
Thrimawithana, D. J. & Madawala, U. K. A novel matrix converter based bi-directional IPT power interface for V2G applications. in IEEE International Energy Conference and Exhibition, 495–500 (2010)
Li, S., Li, W., Deng, J., Nguyen, T. D. & Mi, C. C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 64(6), 2261–2273 (2015).
Lu, R. G., Wang, T. Y., Hua Mao, Y. & Zhu, C. Analysis and design of a wireless closed-loop ICPT system working at ZVS mode. In 2010 IEEE Vehicle Power and Propulsion Conference, 1–5 (2010).
Hosotani, T. & Awai, I. A novel analysis of ZVS wireless power transfer system using coupled resonators. in 2012 IEEE MTT-S International Microwave Workshop Series on Innovative Wireless Power Transmission: Technologies, Systems, and Applications, 235–238 (2012).
Wang, K. et al. Current detection and control of synchronous rectifier in high-frequency LLC resonant converter. IEEE Trans. Power Electron. 37(4), 3691–3696 (2022).
Budhia, M., Covic, G. A. & Boys, J. T. Design and optimization of circular magnetic structures for lumped inductive power transfer systems. IEEE Trans. Power Electron. 26(11), 3096–3108 (2011).
Yan, Z. et al. A rotation-free wireless power transfer system with stable output power and efficiency for autonomous underwater vehicles. IEEE Trans. Power Electron. 34(5), 4005–4008 (2019).
Mai, R. K., Liu, Y. R. & Chen, Y. Research on efficiency optimization method of induction power transmission system based on optimal equivalent load control. Proc. Chin. Soc. Electr. Eng. 36(23), 6468–6475 (2016) (in Chinese).
Xia, C. Y. et al. IPT system linear active disturbance rejection constant voltage output and maximum efficiency tracking compound control method. in Proceedings of the Chinese Society of Electrical Engineering, 1–13 (2021). (in Chinese).
Ye, H., Jin, G., Fei, W. & Ghadimi, N. High step-up interleaved dc/dc converter with high efficiency. Energy Sources A 1, 1–20. https://doi.org/10.1080/15567036.2020.1716111T (2020).
Li, H., Li, J., Wang, K., Chen, W. & Yang, X. A maximum efficiency point tracking control scheme for wireless power transfer systems using magnetic resonant coupling. IEEE Trans. Power Electron. 30(7), 3998–4008 (2015).
Diekhans, A., Stewing, F., Engelmann, G., van Hoek, H. & De Doncker, R. W. A systematic comparison of hard- and soft-switching topologies for inductive power transfer systems. in 2014 4th International Electric Drives Production Conference (EDPC), 1–8 (2014). https://doi.org/10.1109/EDPC.2014.6984420.
Biela, J., Hassler, D., Miniböck, J. & Kolar, J. W. Optimal design of a 5 kw/dm 3/98.3% efficient TCM resonant transition single-phase PFC rectifier. in Power Electronics Conference (IPEC), 1709–1716 (2010).
Kim, Y.-S., Sung, W.-Y. & Lee, B. Comparative performance analysis of high density and efficiency PFC topologies. IEEE Trans. Power Electron. 29(6), 2666–2679 (2014).
Altintaş, N., Bakan, A. F. & Aksoy, I. A novel ZVT-ZCTPWM boost converter. IEEE Trans. Power Electron. 29(1), 256–265 (2014).
Bodur, H., Cetin, S. & Yanik, G. A new zero-voltage transition pulse width modulated boost converter. IET Power Electron. 4(7), 827–834 (2011).
Wang, J. et al. A new control method for boost converter in discontinuous conduction mode with synchronous rectification and zero voltage switching. IEEE ECCE Asia Downunder 2013, 650–654. https://doi.org/10.1109/ECCE-Asia.2013.6579168 (2013).
Steigerwald, R. L. A comparison of half-bridge resonant converter topologies. IEEE Trans. Power Electron. 3(2), 174–182 (1988).
Acknowledgements
This work was supported by the National Natural Science Foundation of China under Grants 52007195.
Author information
Authors and Affiliations
Contributions
X.Q. was the main author of this thesis, coming up with the innovations and writing the paper; S.P. and X.W. provided the theoretical guidance; S.J., R.E. and K.Q. provided experimental help.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Qiu, X., Sun, P., Rong, E. et al. An optimal load indirect matching method without parameter identification and system efficiency optimization. Sci Rep 13, 513 (2023). https://doi.org/10.1038/s41598-023-27505-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-27505-7
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
