
Abstract
In recent years, air pollution has become a factor that cannot be ignored, affecting human lives and health. The distribution of high-density populations and high-intensity development and construction have accentuated the problem of air pollution in China. To accelerate air pollution control and effectively improve environmental air quality, the target of our research was cities with serious air pollution problems to establish a model for air pollution prediction. We used the daily monitoring data of air pollution from January 2016 to December 2020 for the respective cities. We used the long short term memory networks (LSTM) algorithm model to solve the problem of gradient explosion in recurrent neural networks, then used the particle swarm optimization algorithm to determine the parameters of the CNN-LSTM model, and finally introduced the complete ensemble empirical mode decomposition of adaptive noise (CEEMDAN) decomposition to decompose air pollution and improve the accuracy of model prediction. The experimental results show that compared with a single LSTM model, the CEEMDAN-CNN-LSTM model has higher accuracy and lower prediction errors. The CEEMDAN-CNN-LSTM model enables a more precise prediction of air pollution, and may thus be useful for sustainable management and the control of air pollution.
Similar content being viewed by others


Introduction
Air pollution can significantly affect air quality1, More than 90% of the world’s population resides in places where air pollution levels surpass the limits specified by the World Health Organization (WHO)2. As the largest developing country, China has been suffering from serious air pollution for years in response to the rapid industrialization and urbanization3, which has led to a dramatic increase in the emissions of both ambient air pollutants and greenhouse gases4. The major air pollutants in China are PM2.5 (particles ≤ 2.5 μm in aerodynamic diameter), PM10 (particles ≤ 10 μm in aerodynamic diameter), sulfur dioxide (SO2), nitrogen oxide (NO2), carbon monoxide (CO), and ozone (O3)5.Almost every major Chinese city exceeds the limits for air pollutants recommended by the WHO, leading to approximately 1.1–1.6 million premature deaths annually6. Air pollution can also lead to huge direct and indirect losses to the social economy. In severe haze pollution events, public and private transportation can be severely affected by a reduction in visibility. Therefore, measuring, monitoring, and predicting air quality are vital for achieving the eventual reduction of haze risks in practical life7.
Many cities in China have experienced serious local pollution events owing to coal mining, urbanization, excessive coal consumption, and the development of heavy industries (such as iron, steel, and cement)8. In particular, according to statistics, the bottom 20 cities of the 168 key cities in China, ranked in terms of air quality in 2020, are facing serious air pollution problems9. To facilitate the management and research of China's regional compound air pollution, we targeted these cities for the accurate and real-time prediction of air pollutants.
With the maturity of various machine learning methods, deep learning models based on neural networks have been used in air pollution research. Deep learning methods based on long short-term memory (LSTM) artificial neural networks, radial basis functions (RBFs), back propagation (BP) neural networks, and support vector machines (SVMs) have been used by many scholars to study the non-linear relationship between air quality and meteorological data10,11,12. These methods are divided into two main types: single machine learning and hybrid machine learning models. Table 1 summarizes studies of air pollutants and air pollution forecasting models published in the past three years. Hybrid machine learning models have received considerable attention, as presented in Table 1.
Therefore, the principal objective of this study was to develop a new and highly accurate air pollution forecasting method. In this study, we developed a new hybrid model based on complete ensemble empirical mode decomposition of adaptive noise (CEEMDAN), convolutional neural network (CNN), and LSTM neural networks for air pollution forecasting.
First, we found that the LSTM model has shown potential in adapting to different types and representations of data, recognizing sequential patterns over a long time span, and capturing complex nonlinear relationships21. Thus, it has been applied to various time-series prediction fields, including stock price movement22, ocean wave height series23, and air pollutant prediction24,25,26. However, the commonly used forecasting methods at present often use a single forecasting model to model the time-series; as such, they cannot intuitively reflect the nonlinearity of the corresponding series. Therefore, the accuracy of the corresponding prediction results is lacking. The combined forecasting model effectively solves the above problems, and the accuracy of the overall forecasting results can be achieved be completely considering to the advantages of each forecasting model27. Therefore, when the time-series data have the characteristics of significant randomness and rich characteristic information, the concept of individual response should be adopted to explore the prediction method based on the adaptive noise-added ensemble empirical mode decomposition (CEEMDAN). The air pollution time series problem is transformed into a number of component prediction problems with significant regularity, and the component prediction results are then merged and analyzed to obtain a higher-precision prediction value, thereby making the modeling easier and more accurate28.
In accordance with the above ideas, this study proposes a deep learning model based on LSTM of CEEMDAN and CNN for evaluating the meteorological and air pollution data of major cities with serious air pollution problems in China. Moreover, the particle swarm optimization (PSO) algorithm is used to determine the parameters of the CNN-LSTM model. To study and predict the air pollution value, we aimed to find the optimal deep learning model suitable for this type of data. Simultaneously, we concentrate on estimating the health burden associated with air pollution. We comprehensively investigated the health burden attributable to the long-term exposure to PM2.5, PM10, SO2, NO2, CO, and O3 in China by 2021. We also aimed to estimate the premature deaths attributable to the long-term exposure to the above ambient air pollutants in Chinese cities. The results will therefore provide a scientific basis to formulate relevant policies for air pollution control projects. It also provides a reference for areas around the world with increasingly prominent air pollution problems in basins owing to the high-density population layout and high-intensity development and construction.
Materials and methods
The main methodology of this study involved deep learning and frequency decomposition algorithms. Moreover, to understand the proposed method, first, it is crucial to understand the constituting models, as well as how they learn or perform. The air pollution forecasting models in this study include CEEMDAN, CNN, LSTM, and PSO. A brief description of these methods is given below.
Complete ensemble empirical mode decomposition with adaptive noise
The empirical mode decomposition (EMD) algorithm is a signal analysis method originally proposed by Huang et al.29. It is an adaptive data processing or mining method that is suitable for the processing of nonlinear and non-stationary time series. It is also essentially a smoothing process of data series or signals30. In EMD, any given complex signal can be empirically decomposed into a collection of basic oscillatory components, called intrinsic mode functions (IMFs). The IMF represents the oscillation mode of the original signal31. The original signal \(x(t)\) can be reconstructed by the following formula:
where \({c}_{i}\left(t\right)\) is the \(i\) th IMF (i.e. local oscillation) and \({r}_{n}\left(t\right)\) is the \(i\) th residue (i.e. local trend).
The EMD method can ideally be applied to the decomposition of any type of time series (signal) because of its obvious advantages over previous smoothing methods in dealing with non-stationary and non-linear data32,33. To overcome the problem of mode mixing in EMD and solve the problem of IMF component alignment during ensemble averaging, Torres improved CEEMD from the decomposition process and added white noise, and then proposed a complete ensemble empirical mode decomposition of adaptive noise34. In the new CEEMD, white noise is added in pairs to the original data (i.e. one positive and one negative) to generate two sets of ensemble IMFs.
where \(S\) is the original data data; \(N\) is the added white noise; \({M}_{1}\) is the sum of the original data with positive noise, and \({M}_{2}\) is the sum of the original data with the negative noise. There is less residual noise in the inherent modal components, which effectively reduces the reconstruction error, and a global stopping standard exists at each stage of the decomposition. The decomposition efficiency in this method was the highest35.
This study uses the CEEMDAN algorithm to decompose non-stationary air pollution series data to form a series of IMF subsequences and residual terms (RES) with different frequency characteristics.
Convolutional neural network
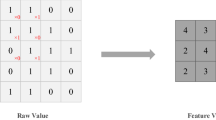
A CNN is a neural network used to process data with a known grid-like topology36. A CNN is a feed-forward neural network whose basic structure is determined by the input, convolutional, pooling, fully connected, and output layers37. The convolutional layer is the core of the CNN, where the convolutional kernel \({C}_{j}\) is used to extract the internal features.
where \({A}_{i}\) represents the input, \(\otimes\) represents a convolution operator, \(\sigma\) represents the activation function (where ReLU is selected), \({\upomega }_{i}\) is the weight of the kernel linked to the \(i\) th feature map, and \({b}_{i}\) represents the bias matrix.
The pooling layer is mainly used to pool the data after the sniper operation. Its main function is to compress the data, remove unnecessary information, effectively improve the generalization ability of the network, and increase the calculation speed38,39. Each node of the fully connected layer is connected to all nodes of the upper layer, which is used to integrate the comprehensive features extracted from the front and aid in the prediction of the subsequent LSTM layer40. The structure of a one-dimensional convolutional neural network is shown in Fig. 1.

Structure of the one dimensional convolutional neural network.
Long short-term memory model
Long and short-term memory (LSTM)41 neural networks are special recurrent neural networks that can learn dependent information for a long time and effectively avoid the phenomenon of a disappearing gradient42. It is a machine-learning architecture that allows the model to “learn” over many time steps. Additionally, it can root the memory cell in the neural nodes of the hidden layer of the cyclic neural network to record historical information; by adding three gate structures (input, forget, and output), the historical information can be realized43.

Structure of the long- and short-term memory neural network cell.
As shown in Fig. 2, when setting the input sequence to \(x({x}_{1},{x}_{2},\dots ,{x}_{t})\), the state of the hidden layer is \({(h}_{1},{h}_{2},\dots ,{h}_{t})\), and the state update and output of the memory unit can be summarized as
where “\(\odot\) ” denotes the Hadamard product; \({i}_{t}\), \({f}_{t}\), and \({o}_{t}\) are the output of different gates; \({c}_{t}\) is the vector for the cell state; \({h}_{t-1}\) is the output information of the hidden layer unit at the previous moment; \({h}_{t}\) is the new state of memory cell; \({W}_{h}\), \({W}_{x}\), and \({W}_{c}\) are the weights of the corresponding gate; and \(sigmoid\) and \(\mathrm{tanh}\) are the two different activation functions, respectively.
As air pollution data from ground monitoring sites are usually in a time series format, air pollution can be modeled by considering the time-dependent patterns 44. Feed-forward neural networks (FNNs) have been commonly used in previous studies to predict air pollution. However, these models cannot consider the time dependency of the parameters. Sequence modeling facilitates the excavation of temporal dynamic features in historical data and enusres better predictions45. Compared with the FNN, recurrent neural networks (RNN) are designed to deal with time-series data; however, this technique experiences vanishing or exploding gradient problems46, and LSTM can be used to overcome this problem. In this study, we chose LSTM for air pollution prediction as it extracts representative features from historical air pollution data and obtains further representations of the merged features to generate predictions.
Particle swarm optimization
Particle swarm optimization (PSO) is an evolutionary computation technique developed by Kennedy and Eberhart in 199547. This algorithm is a swarm intelligence optimization algorithm that simulates the foraging behavior of bird swarms and adjusts its own speed and position to optimize it until it meets the convergence termination condition48,49. All particles in the swarm stay in the set search space, as shown in Eqs. (6) and (7):
where \({V}_{i,j}^{t}\) is the velocity of particle \(i\) at generation \(t\), and \(j\) is the dimension; \({x}_{i,j}^{t}\) is the position of particle \(i\); \({c}_{1}\) and \({c}_{2}\) are cognitive and social coefficients; \({y}_{i,j}^{t}\) is the best value in the group at generation \(t\); \({\widehat{y}}^{t}\) is the best value of all of the best values from different groups; and \({r}_{1,i,j}^{t}\) and \({r}_{2,i,j}^{t}\) are uniformly distributed random numbers in the interval [0,1]. Furthermore, the concept of inertia weight \(\omega\) is developed to obtain better control exploration and exploitation of the searched particles.
PSO has several advantages over other metaheuristic techniques in terms of its simplicity, convergence speed, and robustness. It converges to global or near-global optima, irrespective of the shape or discontinuities of the cost function. As PSO can prevent the network convergence from falling into the local best solution, it can be selected to optimize the LSTM input layer weights50. Most previous studies on PSO systems have provided empirical results and conducted informal analyses47,51,52. Many studies have shown that the PSO algorithm can improve the prediction accuracy by optimizing the LSTM model53,54,55. Thus, this study initially proposes an enhanced PSO-based LSTM model, which is used to forecast air pollution.
Proposed air pollution forecasting model
The CEEMDAN-CNN-LSTM model
Air pollution data are a time series characterized by complex instability, nonlinearity, and periodic uncertainty, which are affected by many factors. As mentioned above, LSTM has a strong modeling and analysis ability for processing time-series data. The performance of the LSTM model in time-series analysis is extraordinary47. However, the LSTM model only extracts the temporal features of the flames, whereas turbulent flames characterize both the temporal and spatial evolution. A CNN is a deep learning network wherein the local and overall features of the input data can be constantly extracted using nonlinear mapping56,57. It can extract the spatial features of the flames. Therefore, we proposed a combination of CNN and LSTM models. CNN-LSTM has been extensively employed for time-series forecasting. However, determining the structure is difficult, and often falls into a local minimum58. The CEEMDAN method can divide the singular values into separated IMFs and determine the general trend of the real time series; thus, it can help determine the characteristics of the complex non-linear or non-stationary time-series data59. This can effectively reduce unnecessary interactions among singular values and improve the performance when a single kernel function is used in forecasting60. This section proposes a model that combines the CEEMDAN and CNN-LSTM models for air pollution prediction.
As shown in Fig. 3, in this study, the CEEMDAN algorithm was used to decompose the data of air pollution change, measured by the air quality monitoring station, to obtain a limited number of IMFs. Subsequently, we used the CNN-LSTM model to learn and predict the short-term time series of each IMF component, and added the predicted values of each IMF component to obtain the final prediction result.

Flow chart of air pollution prediction based on the integrated CEEMDAN-CNN-LSTM model.
Finally, PSO is used to optimize the hyperparameters of LSTM because of its simplicity and ease of implementation61. The core idea of the PSO algorithm is to first initialize a set of random solutions and then iteratively find the optimal solution62. The PSO algorithm can enable the LSTM model to accurately and quickly determine the optimal parameters according to the characteristics of the air pollution data, and realize an effective combination of the network structure of the LSTM model and the features of the air pollution data63.
Model fitting and validation
To evaluate the predictive ability of the models, two indices, namely, the root mean square error (RMSE) and mean absolute error (MAE) were calculated in this study. In general, the smaller the RMSE, MAE, and \({R}^{2}\), the more accurate the model. RMSE, MAE, and \({R}^{2}\) are defined in Eqs. (11)–(13), respectively.
where \(n\) is the number of data points, \({y}_{i}\) is the measured aqueous air pollution, \(\overline{y }\) is the average of the real values, and \({f}_{i}\) is the air pollution simulated by the model.
Case study
Study area and data set
According to historical research, air pollution is highly correlated with six air pollutants (PM2.5, PM10, NO2, CO, O3, and SO2)15,64,65,66. Therefore, this study investigated 20 cities with the worst air quality in China and selected the most representative 6 cities according to their primary pollutants, economic conditions, and geographical factors to prove the validity and robustness of the hybrid model. The final choices were Xinxiang (main air pollutant: PM2.5), Taiyuan (PM10), Zibo (SO2), Handan (NO2), Binzhou (O3), and Jinan (CO). In this study, data were obtained from the national urban air quality real-time release platform of the China Environmental Monitoring Station. Daily data were obtained for the period from January 1, 2016, to December 31, 2021, with a total of 2192 observations. For each city, data from 2016 to 2020 were used as the training sample; 80 and 20% of the samples were used as the training and the validation sets, respectively. The data from 2021 were used as separate test sets.
Descriptive statistics
To better illustrate the situation of the used data, the pollutant concentrations of the six cities were plotted as a line graph, and the results are shown in Fig. 4. Overall, the six major air pollutants showed obvious periodicity; PM2.5, SO2, CO, and PM10 showed a yearly decreasing trend. Among them, the concentrations of PM2.5, SO2, NO2, CO, and PM10 reached their highest values in January and the lowest in September each year, showing a “U” shape; the change trend of O3 is the opposite. The highest and lowest concentrations of O3 occur in September and January every year, respectively, and the distribution is in the shape of “Λ”. This research suggests that this anomaly is not a coincidence, and a deeper connection exists between the six pollutants. In summer, strong solar radiation causes the surface temperature to rise sharply and heats the air near the surface. This leads to increased convection and precipitation, which accelerate the diffusion and deposition of atmospheric pollutants67. Frequent sandstorms cause air pollution68. Stable weather and biomass combustion are common69. In winter, the low surface temperature causes surface inversion, and the meteorological conditions are not conducive to vertical convection70; therefore, the near-surface air pollution is high. As these six pollutants have similar influencing factors and trends, the remaining five pollutants need to be combined to predict the concentration of a single pollutant.

The pollutant concentrations of the six cities.
Results and discussion
Through knowledge of past forecasting studies71,72,73,74,75, we know that the prediction work based on LSTM obeys a particular framework: PM2.5 (or other time series) is decomposed into several IMFs and a residual by EMD; subsequently, the LSTM model is applied to each IMF and residual; and finally, the training results are simply added to obtain the predicted value. However, this framework has some limitations:
-
1.
The inability to prevent the transfer of white noise from high frequency to low frequency during EMD decomposition.
-
2.
Choosing the high-frequency IMF.
-
3.
Unable to choose the optimal parameter combination in the LSTM model.
-
4.
Decomposition predictions only for a single sequence without considering whether other factors will influence the prediction results.
To address these problems, we combine the model in this section to provide the results and discussion.
CEEMDAN decomposition results of PM2.5
The CEEMDAN algorithm was selected to solve the problem occurring when the white noise of the EMD algorithm transfers from high frequency to low frequency. Figure 5 shows the CEEMDAN decomposition results of PM2.5 of Binzhou from January 1, 2016, to December 31, 2021 (see appendix for the results of the remaining five cities). The IMF decomposed by CEEMDAN shows a certain change law and cycle and subsequently reflects the information on different time scales in the original time series. In the figure, the abscissa represents the time sequence number and the ordinate represents the frequency of each IMF and RES. The results show that in the high-frequency space (IMF0-IMF3), the IMF component fluctuates significantly and the fluctuation rate is slow, indicating that the short-term PM2.5 concentration is extremely unstable. In the intermediate frequency space (IMF4, IMF5), the IMF component exhibits a certain periodicity, and the component fluctuation frequency gradually decreases. In the low-frequency space (IMF6, IMF7, RES), the fluctuation of the IMF component becomes gentler, indicating that since 2016, PM2.5 in Binzhou has continued to decline, and the air quality has significantly improved. However, with the passage of time, the PM2.5 has decreased. The rate slowed and the concentration data smoothed out. Finally, the prediction results of the model under CEEMDAN, EEMD, VMD and EMD decompositions are presented in Table 2. Among them, the RMSE and MAE under CEEMDAN decomposition are 55.20 and 44.54% lower than EMD, respectively, and the R2 increased by 19.62%. In general, compared with the EMD, EEMD and VMD, CEEMDAN has a more obvious effect on improving the model prediction accuracy.

Binzhou's PM2.5 decomposition results.
PSO parameter optimization results
In this study, the parameter space was chosen as the time step (n) of the time series and the number of neurons (cells) in the LSTM neural network model. The range of n was 1–20, and the range of cells was 1–100. We considered the daily data of 2016–2020 and 2021 as the training and test sets, respectively, and the parameter results of the PM2.5 prediction model training for the six cities are presented in Table 3. As presented in Table 3, among the six cities, the optimal time step for the six cities is only two and four, which shows that the CEEMDAN-PSO-CNNLSTM model constructed in this study is only dependent on data from the past few days. Additionally, the minimum and maximum numbers of LSTM neurons were 42 and 92, respectively, indicating that the model was more sensitive to changes in the number of parameter neurons.
Final model predictions
After CEEMDAN decomposition and PSO algorithm optimization, the variables and parameters were input into the CNN-LSTM model to predict the final air pollutant value. In other studies, prediction methods combined with EMD treated the first high-frequency IMF sequence as a noise term and discarded it, which did not contribute to the prediction result76,77. This method is simple and crude and may lose some useful information and retain some noise signals. Therefore, a CNN was selected to screen the IMFs. Simultaneously, to illustrate the robustness and superiority of the proposed model, the air pollution results of six types of cities affected by different air pollutants were predicted, respectively, and those of SVM, CEEMDAN-SVM, PSO-LSTM, PSO-CNN-LSTM, CEEMDAN- PSO-LSTM, CEEMDAN-PSO-CNNLSTM models were compared with each other. For conciseness, the following subsections only provide the prediction and comparison results of PM2.5, and appendix presents the prediction results of the other five pollutants.
The MSE, MAE, and R2 values obtained using the six prediction models are listed in Table 4. Overall, the proposed CEEMDAN-PSO-CNNLSTM model has the best prediction accuracy; it has the smallest MSE and MAE and the highest R2 among the predictions for the six cities. Simultaneously, Fig. 6 also shows that the PM2.5 prediction curve of the proposed model has a high degree of fit with the actual curve, and the prediction accuracy is high. Therefore, the proposed model is considered to be effective and robust in predicting results under different polluted environments and outperforms the other models.

PM2.5 forecast curve for the six cities. (μg/m3). (a) Binzhou, (b) Jinan, (c) Handan, (d) Taiyuan, (e) Xinxiang and (f) Zibo.
Specifically, the prediction accuracy of the model after CEEMDAN decomposition was significantly higher than those of the models without decomposition (CEEMDAN-PSO-CNNLSTM vs. PSO-CNN-LSTM, CEEMDAN-PSO-LSTM vs. PSO-LSTM, and CEEMDAN-SVM vs. SVM). Considering Binzhou as an example, the prediction accuracies of the SVM, PSO-LSTM, and PSO-CNNLSTM models decomposed by CEEMDAN improved by 0.08, 0.31, and 0.39 (R2), respectively, while the prediction errors were reduced by 12.24, 34.34, and 51.82%, (RMSE) and 13.85, 32.05, and 48.61% (MAE), respectively. This shows that the signal decomposition technique can effectively reduce the non-stationarity of the PM2.5, thereby improving the performance. Additionally, according to the results listed in Table 2, the necessity of CEEMDAN decomposition is also confirmed. Finally, in response to the second question raised at the beginning of this section, the model prediction results are compared and analyzed. We found that when CEEMDAN is not decomposed or the model has few input variables (only five variables are input in the PSO-LSTM and PSO-CNN-LSTM models), the improvement in prediction accuracy by using CNN for feature screening is not obvious. In the six selected cities, the R2 values increased by approximately 0.01–0.08, and the RMSE and MAE decreased by approximately 1–8% and 1–9%, respectively. For the model after CEEMDAN decomposition (there are more than 10 variables in the CEEMDAN-PSO-LSTM and CEEMDAN-PSO-CNNLSTM models), the use of CNN for feature screening greatly improved the model prediction accuracy; in the six selected cities, the R2 increased by 0.10–0.18, and the RMSE and MAE decreased by approximately 27–46% and 22–42%, respectively. We concluded that when there are more variable inputs, using a CNN for feature screening can increase the accuracy and error of the model. Therefore, it is feasible and effective to use a CNN to screen each IMF component after CEEMDAN decomposition.
The PM2.5 prediction scatter plot for each model is shown in Fig. 7. The proposed model had the highest R-value (0.94). The graph shows that CEEMDAN-PSO-CNNLSTM also shows a fitting advantage over the other models. The scattered points are evenly distributed on both sides of the diagonal, and the fitted straight line is the closest to the diagonal. Additionally, although the R-value of the SVM model was high, based on the results of the model prediction, the predicted value of the SVM was usually high, and it was not sensitive to changes in extreme values. Overall, the proposed model showed better PM2.5 predictions and achieved better prediction performance.

Scatterplots of the actual and forecast PM2.5 values achieved using various models (Binzhou data). Model 1: CEEMDAN-PSO-CNNLSTM. Model 2: PSO-LSTM. Model 3: PSO-CNN-LSTM. Model 4: CEEMAND-PSO-LSTM. Model 5: CEEMDAN-SVM. Model 6: SVM. Model 7: BP. Model 8: MLP.
Comparison of prediction results without introducing air pollutants
The prediction results for PM2.5 prediction results of the six cities are shown in Fig. 8. From the graph, the curve of the joint prediction of the five pollutants has a high degree of fit with the actual curve, which can better reflect the change trend of PM2.5 and changes in extreme values. The RMSE, MAE, and R2 values obtained from the two predictions are listed in Table 5. Considering the prediction of PM2.5, RMSE and MAE of Binzhou decreased by 10.70 and 7.69%, respectively, and R2 increased by 0.07; the RMSE and MAE of Jinan decreased by 9.98 and 11.19%, respectively, and R2 increased by 0.03; the RMSE and MAE of Handan decreased by 15.92 and 11.04%, respectively, and R2 increased by 0.09; the RMSE and MAE of Taiyuan decreased by 14.27 and 16.09%, respectively, and R2 increased by 0.05; the RMSE and MAE of Xinxiang decreased by 16.81 and 15.20%, respectively, and R2 increased by 0.07; the RMSE and MAE of Zibo decreased by 27.78 and 24.80%, respectively, and R2 increased by 0.1. Notably, compared with those of the single PM2.5 time-series prediction, the RMSE and MAE obtained by the combination of the other five pollutants were smaller, and the R2 was larger. This indicated that the input of the five pollutant data improved the prediction accuracy of the model. The positive effect, especially for the cities not polluted by PM2.5, by combining the five air pollutants to predict the model performance was more significant; however, for the cities mainly polluted by PM2.5, introducing the remaining five air pollutants into the model had a more significant impact. Various pollutants also have a certain effect on improving the prediction accuracy. Therefore, it is necessary to combine the predictions of the remaining five pollutants with that of the sixth air pollutants.

PM2.5 prediction result curves (with air pollutants vs. without air pollutants). (a) Binzhou, (b) Jinan, (c) Handan, (d) Taiyuan, (e) Xinxiang and (f) Zibo.
Health effect assessment
Air pollution affects the economy and causes serious damage to human health. The number of deaths due to excessive pollutant concentrations is presented in Table 8. This section is based on the predicted concentrations in 2021, combined with historical research, and uses the WHO revised guidance value in 2021, the first-level limit, and the second-level limit of China's “Environmental Quality Standard” as the reference concentrations to evaluate the health impact of the population. Tables 6 and 7 the aggregated air pollutant concentration reference values and percentage increases in the population mortality, respectively. Notably, the air pollutants that significantly increase the mortality rate of the population are NO2, which increases the mortality rate by 1.4% per 10 μg·m−3, followed by SO2, which increases the mortality rate by 0.9% per 10 μg·m−3. As presented in Table 8, under the latest WHO standard, the number of deaths due to excessive NO2 concentration is the largest among the six cities, followed by those due to PM10 and PM2.5, respectively. According to the national standard, the number of deaths due to excessive PM10 is the largest, followed by PM2.5. In general, although the concentrations of SO2, CO, and O3 in some cities are significantly higher than those in others, PM2.5, PM10 are the main air pollutants affecting human health. PM2.5, PM10, and NO2 should be considered as the focus of air pollution prevention and control, and must be simultaneously combined with the city's own SO2, CO, and O3 concentration characteristics to gradually tighten the standard limit.
Conclusions
Cities are usually affected by air pollution in several ways. To promote the sustainable development of urban public health and the sustainable development of society, a stable and high-precision air pollutant prediction model is required. This paper studied a series of existing LSTM prediction frameworks and found that some problems still exist in the existing prediction frameworks, including the selection of high-frequency feature signals, the selection of LSTM model parameters, and predictions without considering other closely related drivers of air pollution. Therefore, this study develops a hybrid model named CEEMDAN-PSO-CNNLSTM to solve these problems. First, CEEMDAN is used to decompose the air pollutant signal, and the decomposed data are then sent to the CNN-LSTM neural network for PSO optimization. Finally, the optimized parameter input model was trained using the original data to obtain the final prediction result. Combined with the evaluation criteria, the proposed model had the highest accuracy among the six compared models. Additionally, predictions were made for six cities affected by different pollutants, and we found that the prediction accuracy of the proposed model was the highest in each comparison, indicating the robustness of the model. The advantages of the proposed hybrid model are as follows: 1. considering the influence of other air pollutants, the prediction accuracy for a single air pollutant was improved. 2. Combining the CEEMDAN decomposition with the PSO algorithm and using CNN to screen the IMF not only solves the problem of parameter selection in the LSTM model, but also solves that of white noise and high-frequency signals interfering with the prediction results; thus, it realized the improvement of the traditional prediction framework. At the end of the article, we predict the degree of harm that air pollutants may bring to the health of the population, and offer some suggestions. However, the model proposed in this study still has room for optimization. For example, we consider the spatial location information of each forecast station and improve the prediction accuracy through the joint prediction of different sites. Additionally, referring to forecasting work in other areas, there are still many variables that have not been added to the process of predicting pollutants, such as the wind speed, air pressure, humidity, and temperature, are also important factors affecting the air quality82,83. In future studies, the prediction of air pollution will be further refined, and other variables that may affect air pollution will be added to further optimize the hybrid model and improve its effectiveness.
Data availability
All data generated or analyzed during this study are included in this its supplementary information files.
References
Hou, P. & Wu, S. Long-term changes in extreme air pollution meteorology and the implications for air quality. Sci. Rep. 6, 23792. https://doi.org/10.1038/srep23792 (2016).
WHO. Ambient air pollution A global assessment of exposure and burden of disease. Geneva World Health Organization (WHO) (2016).
Jiang, L. & Bai, L. Spatio-temporal characteristics of urban air pollutions and their causal relationships: Evidence from Beijing and its neighboring cities. Sci. Rep. 8, 1279. https://doi.org/10.1038/s41598-017-18107-1 (2018).
Kan, H., Chen, R. & Tong, S. Ambient air pollution, climate change, and population health in China. Environ. Int. 42, 10–19. https://doi.org/10.1016/j.envint.2011.03.003 (2012).
Yao, M., Wu, G., Zhao, X. & Zhang, J. Estimating health burden and economic loss attributable to short-term exposure to multiple air pollutants in China. Environ. Res. 183, 109184. https://doi.org/10.1016/j.envres.2020.109184 (2020).
Labordena, M., Neubauer, D., Folini, D., Patt, A. & Lilliestam, J. Blue skies over China: The effect of pollution-control on solar power generation and revenues. PLoS ONE 13, e0207028. https://doi.org/10.1371/journal.pone.0207028 (2018).
Yang, X. et al. A long-term prediction model of Beijing Haze episodes using time series analysis. Comput. Intell Neurosci. 2016, 6459873. https://doi.org/10.1155/2016/6459873 (2016).
Zhang, M. et al. Optical and physical characteristics of the lowest aerosol layers over the yellow river basin. Atmosphere https://doi.org/10.3390/atmos10100638 (2019).
Ministry of Ecology and Environment, P. The Ministry of Ecology and Environment reports on the national surface water and ambient air quality in December and January-December 2020, http://www.mee.gov.cn/xxgk2018/xxgk/xxgk15/202101/t20210115_817499.html 4(2021).
Fan, J. et al. Evaluating the effect of air pollution on global and diffuse solar radiation prediction using support vector machine modeling based on sunshine duration and air temperature. Renew. Sustain. Energy Rev. 94, 732–747. https://doi.org/10.1016/j.rser.2018.06.029 (2018).
Huang, Y., Xiang, Y., Zhao, R. & Cheng, Z. Air quality prediction using improved PSO-BP neural network. IEEE Access 8, 99346–99353. https://doi.org/10.1109/access.2020.2998145 (2020).
Lu, J., Hu, H. & Bai, Y. Radial basis function neural network based on an improved exponential decreasing inertia weight-particle swarm optimization algorithm for AQI prediction. Abstr. Appl. Anal. 1–9, 2014. https://doi.org/10.1155/2014/178313 (2014).
Feng, R. et al. Recurrent neural network and random forest for analysis and accurate forecast of atmospheric pollutants: A case study in Hangzhou China. J. Clean. Prod. 231, 1005–1015. https://doi.org/10.1016/j.jclepro.2019.05.319 (2019).
Li, Z., Yim, S.H.-L. & Ho, K.-F. High temporal resolution prediction of street-level PM25 and NOx concentrations using machine learning approach. J. Cleaner Prod. https://doi.org/10.1016/j.jclepro.2020.121975 (2020).
Yan, R. et al. Multi-hour and multi-site air quality index forecasting in Beijing using CNN, LSTM, CNN-LSTM, and spatiotemporal clustering. Expert Syst. Appl. https://doi.org/10.1016/j.eswa.2020.114513 (2021).
Awan, F. M., Minerva, R. & Crespi, N. Improving road traffic forecasting using air pollution and atmospheric data: Experiments based on LSTM recurrent neural networks. Sensors (Basel) https://doi.org/10.3390/s20133749 (2020).
Dairi, A., Harrou, F., Khadraoui, S. & Sun, Y. Integrated multiple directed attention-based deep learning for improved air pollution forecasting. IEEE Trans. Instrum. Meas. 70, 1–15. https://doi.org/10.1109/tim.2021.3091511 (2021).
Lu, G. et al. A novel hybrid machine learning method (OR-ELM-AR) used in forecast of PM2.5 concentrations and its forecast performance evaluation. Atmosphere https://doi.org/10.3390/atmos12010078 (2021).
Du, S., Li, T., Yang, Y. & Horng, S.-J. Deep air quality forecasting using hybrid deep learning framework. IEEE Trans. Knowl. Data Eng. 33, 2412–2424. https://doi.org/10.1109/tkde.2019.2954510 (2021).
Yafouz, A., Ahmed, A. N., Zaini, N. A. & El-Shafie, A. Ozone concentration forecasting based on artificial intelligence techniques: A systematic review. Water, Air, & Soil Pollut., https://doi.org/10.1007/s11270-021-04989-5 (2021).
Kiebel, S. J., von Kriegstein, K., Daunizeau, J. & Friston, K. J. Recognizing sequences of sequences. PLoS Comput. Biol. 5, e1000464. https://doi.org/10.1371/journal.pcbi.1000464 (2009).
Chen, S. & Ge, L. Exploring the attention mechanism in LSTM-based Hong Kong stock price movement prediction. Quantit. Finance 19, 1507–1515. https://doi.org/10.1080/14697688.2019.1622287 (2019).
Zhang, X., Li, Y., Gao, S. & Ren, P. Ocean wave height series prediction with numerical long short-term memory. J. Marine Sci. Eng. https://doi.org/10.3390/jmse9050514 (2021).
Wu, Q. & Lin, H. Daily urban air quality index forecasting based on variational mode decomposition, sample entropy and LSTM neural network. Sustain. Cities Soc https://doi.org/10.1016/j.scs.2019.101657 (2019).
Barve, A., Singh, V. M., Shrirao, S. & Bedekar, M. in 2020 International Conference for Emerging Technology (INCET).
Wang, J., Li, J., Wang, X., Wang, J. & Huang, M. Air quality prediction using CT-LSTM. Neural Comput. Appl. 33, 4779–4792. https://doi.org/10.1007/s00521-020-05535-w (2020).
Wang, J., Zhu, S., Zhang, W. & Lu, H. Combined modeling for electric load forecasting with adaptive particle swarm optimization. Energy 35, 1671–1678. https://doi.org/10.1016/j.energy.2009.12.015 (2010).
Zhang, W. et al. A combined model based on CEEMDAN and modified flower pollination algorithm for wind speed forecasting. Energy Convers. Manage. 136, 439–451. https://doi.org/10.1016/j.enconman.2017.01.022 (2017).
Huang, N. E. et al. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. Royal Soc. Lond. Series A: Math. Phys. Eng. Sci. 454, 903–995. https://doi.org/10.1098/rspa.1998.0193 (1998).
Wang, P., Fu, H. & Zhang, K. A pixel-level entropy-weighted image fusion algorithm based on bidimensional ensemble empirical mode decomposition. Int. J. Distrib. Sens. Netw. https://doi.org/10.1177/1550147718818755 (2018).
Xue, X., Zhou, J., Zhang, Y., Zhang, W. & Zhu, W. An improved ensemble empirical mode decomposition method and its application to pressure pulsation analysis of hydroelectric generator unit. Proc. Inst. Mech. Eng., Part O: J. Risk Reliab. 228, 543–557. https://doi.org/10.1177/1748006x14538246 (2014).
Wu, Z. & Huang, N. E. ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adaptive Data Anal., (2011).
Lei, Y., He, Z. & Zi, Y. Application of the EEMD method to rotor fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 23, 1327–1338. https://doi.org/10.1016/j.ymssp.2008.11.005 (2009).
Torres, M. E., Colominas, M. A., Schlotthauer, G. & Flandrin, P. in IEEE International Conference on Acoustics.
Cao, J., Li, Z. & Li, J. Financial time series forecasting model based on CEEMDAN and LSTM. Phys. A 519, 127–139. https://doi.org/10.1016/j.physa.2018.11.061 (2019).
Tivive, F. H. & Bouzerdoum, A. Efficient training algorithms for a class of shunting inhibitory convolutional neural networks. IEEE Trans. Neural Netw. 16, 541–556. https://doi.org/10.1109/TNN.2005.845144 (2005).
Sainath, T. N. et al. Deep convolutional neural networks for large-scale speech tasks. Neural Netw. 64, 39–48. https://doi.org/10.1016/j.neunet.2014.08.005 (2015).
Ren, J., Wang, H., Chen, G., Luo, K. & Fan, J. Predictive models for flame evolution using machine learning: A priori assessment in turbulent flames without and with mean shear. Phys. Fluids https://doi.org/10.1063/5.0048680 (2021).
Samal, K. K. R., Panda, A. K., Babu, K. S. & Das, S. K. An improved pollution forecasting model with meteorological impact using multiple imputation and fine-tuning approach. Sustain. Cities Soc. https://doi.org/10.1016/j.scs.2021.102923 (2021).
Wei, J., Yang, F., Ren, X.-C. & Zou, S. A short-term prediction model of PM2.5 concentration based on deep learning and mode decomposition methods. Appl. Sci. https://doi.org/10.3390/app11156915 (2021).
Hochreiter, S. & Schmidhuber, J. Long short-term memory. Neural Comput. 9, 1735–1780 (1997).
Zhao, Z., Chen, W., Wu, X., Chen, P. C. Y. & Liu, J. LSTM network: A deep learning approach for short-term traffic forecast. IET Intel. Trans. Syst. 11, 68–75. https://doi.org/10.1049/iet-its.2016.0208 (2017).
Qi, Y., Li, Q., Karimian, H. & Liu, D. A hybrid model for spatiotemporal forecasting of PM25 based on graph convolutional neural network and long short-term memory. Sci. Total Environ. 664, 1–10. https://doi.org/10.1016/j.scitotenv.2019.01.333 (2019).
Kim, T.-Y. & Cho, S.-B. Predicting residential energy consumption using CNN-LSTM neural networks. Energy 182, 72–81. https://doi.org/10.1016/j.energy.2019.05.230 (2019).
Li, X. et al. Long short-term memory neural network for air pollutant concentration predictions: Method development and evaluation. Environ. Pollut. 231, 997–1004. https://doi.org/10.1016/j.envpol.2017.08.114 (2017).
Zhang, B., Zhang, S. & Li, W. Bearing performance degradation assessment using long short-term memory recurrent network. Comput. Ind. 106, 14–29. https://doi.org/10.1016/j.compind.2018.12.016 (2019).
Ren, X., Liu, S., Yu, X. & Dong, X. A method for state-of-charge estimation of lithium-ion batteries based on PSO-LSTM. Energy https://doi.org/10.1016/j.energy.2021.121236 (2021).
Adriansyah, A. & Amin, S. Analytical and empirical study of particle swarm optimization with a sigmoid decreasing inertia weight. Regional Postgraduate Conference on Engineering and Science (RPCES 2006), 247–252 (2006).
Roberge, V., Tarbouchi, M. & Labonte, G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. Industr. Inf. 9, 132–141. https://doi.org/10.1109/tii.2012.2198665 (2013).
Panda, S. & Padhy, N. P. Comparison of particle swarm optimization and genetic algorithm for FACTS-based controller design. Appl. Soft Comput. 8, 1418–1427. https://doi.org/10.1016/j.asoc.2007.10.009 (2008).
Jadoun, V. K., Gupta, N., Niazi, K. R. & Swarnkar, A. Nonconvex economic dispatch using particle swarm optimization with time varying operators. Adv. Elect. Eng. 2014, 1–14. https://doi.org/10.1155/2014/301615 (2014).
Wang, P., Zhao, J., Gao, Y., Sotelo, M. A. & Li, Z. Lane work-schedule of toll station based on queuing theory and PSO-LSTM Model. IEEE Access 8, 84434–84443. https://doi.org/10.1109/access.2020.2992070 (2020).
Gundu, V. & Simon, S. P. PSO–LSTM for short term forecast of heterogeneous time series electricity price signals. J. Ambient. Intell. Humaniz. Comput. 12, 2375–2385. https://doi.org/10.1007/s12652-020-02353-9 (2020).
Wang, J., Cao, J. & Yuan, S. Shear wave velocity prediction based on adaptive particle swarm optimization optimized recurrent neural network. J. Pet. Sci. Eng. https://doi.org/10.1016/j.petrol.2020.107466 (2020).
Song, X. et al. Time-series well performance prediction based on Long short-term memory (LSTM) neural network model. J. Pet. Sci Eng. https://doi.org/10.1016/j.petrol.2019.106682 (2020).
Swietojanski, P., Ghoshal, A. & Renals, S. Convolutional neural networks for distant speech recognition. IEEE Signal Process. Lett. 21, 1120–1124. https://doi.org/10.1109/lsp.2014.2325781 (2014).
Pasupa, K. & Seneewong Na Ayutthaya, T. Thai sentiment analysis with deep learning techniques: A comparative study based on word embedding, POS-tag, and sentic features. Sustai. Cities Soc., https://doi.org/10.1016/j.scs.2019.101615 (2019).
Zheng, H., Yuan, J. & Chen, L. Short-term load forecasting using EMD-LSTM neural networks with a Xgboost algorithm for feature importance evaluation. Energies https://doi.org/10.3390/en10081168 (2017).
Lin, Y., Yan, Y., Xu, J., Liao, Y. & Ma, F. Forecasting stock index price using the CEEMDAN-LSTM model. North Am. J. Econ. Fin. https://doi.org/10.1016/j.najef.2021.101421 (2021).
Gao, B., Huang, X., Shi, J., Tai, Y. & Zhang, J. Hourly forecasting of solar irradiance based on CEEMDAN and multi-strategy CNN-LSTM neural networks. Renewable Energy. 162, 1665–1683. https://doi.org/10.1016/j.renene.2020.09.141 (2020).
Mao, Y., Qin, G., Ni, P. & Liu, Q. Analysis of road traffic speed in Kunming plateau mountains: A fusion PSO-LSTM algorithm. Int. J. Urban Sci. https://doi.org/10.1080/12265934.2021.1882331 (2021).
Tang, G., Sheng, J., Wang, D. & Men, S. Continuous estimation of human upper limb joint angles by using PSO-LSTM model. IEEE Access 9, 17986–17997. https://doi.org/10.1109/access.2020.3047828 (2021).
Yuan, X., Chen, C., Jiang, M. & Yuan, Y. Prediction interval of wind power using parameter optimized Beta distribution based LSTM model. Appl. Soft Comput. https://doi.org/10.1016/j.asoc.2019.105550 (2019).
Wei, J. et al. Estimating 1-km-resolution PM2.5 concentrations across China using the space-time random forest approach. Remote Sens. Environ. https://doi.org/10.1016/j.rse.2019.111221 (2019).
Silibello, C. et al. Spatial-temporal prediction of ambient nitrogen dioxide and ozone levels over Italy using a random forest model for population exposure assessment. Air Qual. Atmos. Health 14, 817–829. https://doi.org/10.1007/s11869-021-00981-4 (2021).
Abirami, S. & Chitra, P. Regional air quality forecasting using spatiotemporal deep learning. J. Clean. Prod. https://doi.org/10.1016/j.jclepro.2020.125341 (2021).
Cui, J. et al. A framework for investigating the air quality variation characteristics based on the monitoring data: Case study for Beijing during 2013–2016. J. Environ. Sci. (China) 81, 225–237. https://doi.org/10.1016/j.jes.2019.01.009 (2019).
Wang, Y. et al. The ion chemistry and the source of PM25 aerosol in Beijing. Atmos. Environ. 39, 3771–3784. https://doi.org/10.1016/j.atmosenv.2005.03.013 (2005).
Chen, W., Tang, H. & Zhao, H. Diurnal, weekly and monthly spatial variations of air pollutants and air quality of Beijing. Atmos. Environ. 119, 21–34. https://doi.org/10.1016/j.atmosenv.2015.08.040 (2015).
Yang, Q., Yuan, Q., Li, T., Shen, H. & Zhang, L. The relationships between PM2.5 and meteorological factors in China: Seasonal and regional variations. Int. J. Environ. Res. Public Health https://doi.org/10.3390/ijerph14121510 (2017).
Qiu, X., Ren, Y., Suganthan, P. N. & Amaratunga, G. A. J. Empirical mode decomposition based ensemble deep learning for load demand time series forecasting. Appl. Soft Comput. 54, 246–255. https://doi.org/10.1016/j.asoc.2017.01.015 (2017).
Jun, W., Lingyu, T., Yuyan, L. & Peng, G. A weighted EMD-based prediction model based on TOPSIS and feed forward neural network for noised time series. Knowl.-Based Syst. 132, 167–178. https://doi.org/10.1016/j.knosys.2017.06.022 (2017).
Bedi, J. & Toshniwal, D. Empirical mode decomposition based deep learning for electricity demand forecasting. IEEE Access 6, 49144–49156. https://doi.org/10.1109/access.2018.2867681 (2018).
Wang, D., Wei, S., Luo, H., Yue, C. & Grunder, O. A novel hybrid model for air quality index forecasting based on two-phase decomposition technique and modified extreme learning machine. Sci. Total Environ. 580, 719–733. https://doi.org/10.1016/j.scitotenv.2016.12.018 (2017).
Sagheer, A. & Kotb, M. Unsupervised pre-training of a deep LSTM-based stacked autoencoder for multivariate time series forecasting problems. Sci. Rep. 9, 19038. https://doi.org/10.1038/s41598-019-55320-6 (2019).
Kumar, S., Panigrahy, D. & Sahu, P. K. Denoising of electrocardiogram (ECG) signal by using empirical mode decomposition (EMD) with non-local mean (NLM) technique. Biocybern. Biomed. Eng. 38, 297–312. https://doi.org/10.1016/j.bbe.2018.01.005 (2018).
Wang, J., Wei, Q., Zhao, L., Yu, T. & Han, R. An improved empirical mode decomposition method using second generation wavelets interpolation. Digital Signal Process. 79, 164–174. https://doi.org/10.1016/j.dsp.2018.05.009 (2018).
Shang, Y. et al. Systematic review of Chinese studies of short-term exposure to air pollution and daily mortality. Environ. Int. 54, 100–111. https://doi.org/10.1016/j.envint.2013.01.010 (2013).
Lai, H. K., Tsang, H. & Wong, M. Meta-analysis of adverse health effects due to air pollution in Chinese populations. BMC Public Health 13, 360 (2013).
Dong, J., Liu, X., Zhang, B., Wang, J. & Shang, K. Meta-analysis of association between short-term ozone exposure and population mortality in China. (2016).
Hong-Qun, M. A. & Cui, L. H. Meta-analysis on health effects of air pollutants (SO2 and NO2) in the Chinese population. Occupation and Health. 32, 1038–1044. https://doi.org/10.13329/j.cnki.zyyjk.2016.0288 (2016).
Zhang, G., Bai, X. & Wang, Y. Short-time multi-energy load forecasting method based on CNN-Seq2Seq model with attention mechanism. Mach. Learn. Appl. https://doi.org/10.1016/j.mlwa.2021.100064 (2021).
Shohan, M. J. A., Faruque, M. O. & Foo, S. Y. Forecasting of electric load using a hybrid LSTM-neural prophet model. Energies https://doi.org/10.3390/en15062158 (2022).
Acknowledgments
The authors would like to acknowledge support from the Major Program of National Philosophy and Social Science Foundation of China (NO. 20&ZD133), Major Social Science Foundation of Zhejiang, China (NO. 22QNYC14ZD) and Zhejiang Gongshang University provincial colleges and universities basic scientific research business fees (NO. JR202101). This work also supported by the characteristic & preponderant discipline of key construction universities in Zhejiang province.
Author information
Authors and Affiliations
Contributions
Shenyi Xu: Conceptualization, Methodology, Software, Writing - original draft. Wei Li: Investigation, Resources, Writing. Yuhan Zhu: Investigation, Resources. Aiting Xu: Conceptualization, Formal analysis, Resources. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Xu, S., Li, W., Zhu, Y. et al. A novel hybrid model for six main pollutant concentrations forecasting based on improved LSTM neural networks. Sci Rep 12, 14434 (2022). https://doi.org/10.1038/s41598-022-17754-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-022-17754-3
This article is cited by
-
Air pollutant prediction model based on transfer learning two-stage attention mechanism
Scientific Reports (2024)
-
Artificial intelligence for improving Nitrogen Dioxide forecasting of Abu Dhabi environment agency ground-based stations
Journal of Big Data (2023)
-
A Seasonal-Trend Decomposition and Single Dendrite Neuron-Based Predicting Model for Greenhouse Time Series
Environmental Modeling & Assessment (2023)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
