
Abstract
Automatic registration of high-resolution remote sensing images (HRRSIs) has always been a severe challenge due to the local deformation caused by different shooting angles and illumination conditions. A new method of characteristic spatial objects (CSOs) extraction and matching is proposed to deal with this difficulty. Firstly, the Mask R-CNN model is utilized to extract the CSOs and their positioning points on the images automatically. Then, an encoding method is provided to encode each object with its nearest adjacent 28 objects according to the object category, relative distance, and relative direction. Furthermore, a code matching algorithm is applied to search the most similar object pairs. Finally, the object pairs need to be filtered by position matching to construct the final control points for automatic image registration. The experimental results demonstrate that the registration success rate of the proposed method reaches 88.6% within a maximum average error of 15 pixels, which is 28.6% higher than that of conventional optimization method based on local feature points. It is reasonable to believe that it has made a beneficial contribution to the automatic registration of HRRSIs more accurately and efficiently.
Similar content being viewed by others

Introduction
Image automatic registration technology has a wide range of applications in the fields of computer vision, medical image processing, and remote sensing image processing. To the best of our knowledge, the previous image registration methods mainly include gray level registration1,2,3,4,5, transform domain registration6,7, and feature-based registration8,9. The registration method based on image grayscale is very sensitive to grayscale, rotation, and deformation, but it is not conducive to automatic registration due to the large amount of calculation10.
Fourier transform is the most commonly used image registration method in the transform domain. The transformations of image translation, rotation, and affine are reflected in the Fourier transform domain. Note that favorable anti-noise robustness can be obtained by using transform domain method11. Nevertheless, its algorithm usually approximates the discrete Fourier transform of points on log polar coordinate grid by interpolation after that on Cartesian grid. Although the algorithm has a small amount of calculation, it has a large interpolation error12.
The feature-based registration methods attempt to extract salient features such as edges and corners and use a small amount of local information e.g., correlation of a small image patch1,13,14 or local line features15,16, to establish matches. The key of the methods is to extract the respective features from two images, and use the spatial relationship of the features to screen out the control points that can be used for registration. Because the feature points are easy to process and analyze, they are applied in the field of image registration widely. Currently, there are many well-known algorithms which have been developed and applied to image registration of remote sensing images, such as Harris17,18, SIFT19,20,21,22, SURF23,24,25, BRISK26, ORB7,27,28,29,30, KAZE31,32, and AKAZE33,34. With the development of deep learning, several new feature extraction methods have emerged in recent years, mainly including Quad-Net35 and SuperPoint36. From the point of view of improve invariance property, deep features extracted by artificial neural network are more likely to outperform image gradient-based strategies such as SIFT.
Although image registration methods based on local features have made great progress, local features are still easily affected by local interference. It is difficult to extract relatively consistent features from images of the same region obtained at different times, from different shooting angles and under different lighting conditions, which is the critical bottleneck in the field of image registration of HRRSIs.
In order to achieve image registration of HRRSIs, it is necessary to obtain more stable feature points, which are not easily influenced by local illumination difference, image point displacement, etc. Therefore, the concept of CSO is proposed to try to optimize the image registration algorithm in this paper, and makes a comparative experimental study. Experimental results show that the CSOs in urban HRRSIs has good stability and is less affected by illumination and shooting angle compared with the feature points extracted by conventional methods. This means that it can fulfil the image registration of urban HRRSIs with high success rate and relative high accuracy.
Methods
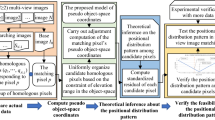
There are three steps of our method, as shown in Fig. 1. Firstly, we define CSOs in urban HRRSIs and extract them and their positioning point by Mask R-CNN37,38. Secondly, encode each of the extracted CSOs according to the category, relative distance, and relative orientation to their 28 neighboring objects. Then, a similarity algorithm of spatial relation code is proposed, and the initial matched object pairs are extracted from the original image and the reference image. Finally, the initial object pairs are further filtered using a position matching algorithm to obtain reliable object pairs. The positioning points of the final object pairs are collected as control points to realize image registration.

Basic process of image registration based on CSOs.
Definition and intelligent extraction of CSOs and their positioning points based on mask R-CNN
Definition of CSOs and their positioning points
A characteristic spatial object is one that can be used for automatic image registration. It should have the following characteristics:
-
1.
Identifiable. A spatial object can be automatically and accurately extracted by a computer with existing technology. Therefore, it is necessary to select the objects with relatively stable spectral and morphological characteristics.
-
2.
Locatable. The object has stable location and contains a positioning point on the image. Meanwhile, the pixel displacement is not obvious at different shooting angles.
-
3.
Relatively stable. The object’s spatial location and form remain stable, which ensures the reliability of the object used for image matching.
-
4.
Ubiquitous. The spatial object of selected categories exists widely on the earth's surface. The problem that images cannot be matched due to the lack of objects may be avoided to some extent with this characteristic.
The positioning point of each CSO must be defined for automatic registration of remote sensing images. Generally, the position near the center of a spatial object which is easy to be located can be selected as the positioning point. For example, since the center lines of urban intersections are generally visible on the remote sensing images, the intersection point of the center lines can be defined as the location point of each urban intersection.
Intelligent extraction of CSOs and their positioning points based on mask R-CNN
The Mask R-CNN model is used to extract CSOs, which is an extension of Faster R-CNN39,40 and an intelligent model for image instance segmentation. The bounding box and category of each object in the image can be predicted with the box predictor. The mask predictor is applied to predict the mask of each object. The key points of each object will be predicted by adding a branch of key point predictor. The model structure of Mask R-CNN is shown in Fig. 2.

Model structure of Mask R-CNN.
The key points of each object are output through the ROI Align layer and the key points predictor, which are extracted from the features of the object extracted by the backbone and the prediction boxes obtained by the region proposal networks (RPN). In order to extract the positioning point, the number of key points of each CSO is defined as 1 in the branch of key point prediction, as shown in Fig. 3.

The branch of key point detection used to predict positioning point of each spatial object.
Object encoding method
The key of image registration is to find a certain number of control points from two images. A control point comes from the positioning point of the same CSO between the original image and the reference image. An object encoding method is proposed to encode each CSO of two images, which is used to find the same object pairs.
Coding framework
The code of a spatial object consists of location P, category C and spatial relationship code R. The coding framework is expressed as:
where P is the coordinate of the positioning point of each CSO, and is directly recorded by floating-point number. C is the category code identified by Mask R-CNN. R records the spatial relationship of a certain number of spatial objects adjacent to each CSO, which is the basic for calculating the similarity of CSOs.
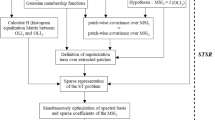
Spatial relationship encoding
Spatial relationship code should have scale invariance, angle invariance and has a certain degree of robustness in order to realize remote sensing image registration. The neighboring baseline is introduced to measure the distance and orientation between CSOs. The nearest N adjacent neighbors are searched and sorted from near to far to construct the neighboring object sequence for each encoding CSO. The ray connecting its positioning point to that of each neighboring object is called the neighboring baseline, and the rotation angle of the neighboring baseline relative to the X axis is called the neighboring angle. The distance between their positioning points is called the neighboring distance.
Taking one of the nearest neighbors as the reference, the relative distance and direction of the remaining neighboring objects are measured by the neighboring distance coefficient ζ and neighboring baseline deflection angle ϕ.
ζ is the ratio of the neighboring distance of the remaining neighboring objects to that of the reference neighboring objects.
where d0 refers to the neighboring distance of the reference neighboring object, di is the neighboring distance of the ith remaining neighboring objects, N is the number of nearest adjacent objects participating in the construction of spatial relationship code.
ϕ is the deflection angle of the neighboring baseline of the remaining neighboring objects relative to the reference neighboring object.
where a0 is the neighboring angle of the reference neighboring object, and ai is the neighboring angle of the ith remaining neighboring objects. The schematic diagram of the parameters in spatial relationship coding is shown in Fig. 4.

Schematic diagram of the parameters of spatial relationship encoding.
The spatial relationship coding rules are as follows:
where C0 refers to the category code of the reference neighboring object, and Ci, Di, and Ai represent the category code, distance code and angle code of the remaining neighboring objects, respectively.
Based on the neighboring distance and the neighboring baseline of the reference object, Di and Ai of remaining neighboring objects are encoded. In order to expand the range of distance code as much as possible and enhance the robustness of spatial relationship code, the stretching value of distance coefficient is calculated as:
where Ai is calculated as follows:
where ϕʹ is:
Code matching algorithm
Calculation of the similarity of spatial relationship codes
The similarity of the spatial relationship codes is used to measure the similarity of two objects. Assume that a spatial object exists in both the object sets of the original image and the reference image, represented as L and S respectively. Then the code of L and S are expressed as:
where FL and FS represent the spatial relationship codes of L and S, respectively.
The similarity of FL and FS is:
where w is the matching coefficient and \(\overline{p}\) is the average matching degree of the remaining neighboring objects.
Take out one of the remaining neighboring objects from L and S, respectively, and their similarity is:
where \(D_{i}^{SL}\) and \(A_{i}^{SL}\) are expressed as
where i and j represent one of the remaining neighboring objects of L and S, respectively.
A certain neighboring object in L traverses all the other neighboring objects in S, and the similarity is calculated according to Eq. (10). If the maximum similarity is greater than the threshold, it is considered that the neighboring object of L has found a match among the neighboring objects of S. \(\overline{p}\) is calculated by
where pk is the similarity corresponding to the two matching neighboring objects in L and S, and NSL is the total matching number of the remaining neighboring objects; a is the similarity threshold.
w is calculated as follows:
where β represents the minimum matching number of neighboring objects required for spatial object matching.
Object matching based on spatial relationship codes
As can be seen from above, the selection of reference neighboring object is the key to spatial relationship encoding. Different reference neighboring object will result in completely different spatial relation code for the same CSO.
It cannot be guaranteed that each CSO has the same neighboring objects on two remote sensing images due to the differences of imaging time, image quality and other factors in remote sensing images. To enhance the robustness of the algorithm, M nearest neighbor objects are selected from the neighboring object set of each CSO as reference to obtain M spatial object codes according to Eq. (4). The similarity of two CSOs is taken as the maximum similarity of these codes.
For each CSO extracted from the original image, the CSO with the greatest similarity is found in the reference image. If the similarity exceeds a, a match is considered to be found and put into the initial matched object pairs.
Position matching algorithm
A position matching algorithm is applied to the initial matched object pairs to acquire the reliable control points. Assume that a certain CSO extracted from the original image is L1, and the matched CSO in the reference image is S1. Their 28 nearest neighboring objects (or the actual number if less than 28) are searched respectively. Each neighboring object L2 of L1 is traversed from near to far, to search matched object S2 from the nearest neighbor objects of S1 through similarity calculation of spatial relationship codes. If S2 exists, the rotation angle and scaling factor of the coordinates of the reference image relative to that of original image are calculated as
where aS1 and sS1 represent the rotation angle and scaling factor, aL2 L1 and aS2 S1 are the rotation angles of the neighboring baseline of L2 and S2 respectively, dL2 L1 and dS2 S1 are the neighboring distances of L2 and S2 respectively.
The coordinate origins of the two images are moved to the locations where L1 and S1 are located, and then the coordinates of each neighboring object of L1 are converted to the coordinate system of the reference image according to Eq. (14) to determine whether there is an object of the same category in the neighboring objects of S1 within a certain distance threshold ε. If at least 3 neighboring objects of L1 satisfy the above condition, L1 and S1 are considered to be a correct match. From the initial matched object pairs, the correct matches are reserved to construct the reliable object pairs.
Automatic image registration
The positioning points of the reliable object pairs are collected as control points, which are substituted into the polynomial correction equation to calculate the coordinate transformation from the original image to reference image:
where (x, y) are the coordinates of the original image, (u, v) are the coordinates of the reference image, n is the power of polynomial equation, and the aij and bij are the undetermined coefficients which are obtained by the least square method.
Generally, the minimum number of control points (NCmin) required in image registration is as follws:
In particular, at least 3 control points are required when n is set to 1, which is the minimum number of control points to perform registration.
To further obtain reliable control point pairs, the values of aij and bij in Eq. (15) are evaluated by the least square method, and the predicted coordinates and distance error are calculated for each control point. Then, the control point with the maximum distance error is found. If its error is greater than ε, the control point will be removed from the pairs. The current power (n) will be subtracted by 1 if the number of remaining points is less than the minimum number calculated by Eq. (16). Then, the values of aij and bij are re-estimated with the remaining control points until the maximum distance error is less than ε or the number of control points is less than or equals to 3.
After the reliable control points are acquired, the process of automatic image registration is as follows: firstly, the extent of the original image is converted to the output extent according to Eq. (15). Then, a target image is created by the output extent and resolution. Finally, for each pixel of the target image, its coordinates are transformed to the original coordinates according to Eq. (15), to get the pixel value from the original image. The automatic registration is completed when all the pixels of the target image are computed.
Experiments and results
Selection and extraction of CSOs and their positioning point
In urban HRRSIs, some artificial objects such as sports fields, across-road bridges, across-river bridges, and urban intersections, have stable morphological and spectral characteristics, which can be extracted by Mask R-CNN easily. Meanwhile, these objects exist widely in the urban area. So, they are selected as CSOs to carry out the experiments of image registration. Figure 5 shows some typical CSOs in urban HRRSIs.

Typical CSOs and their positioning point on from level 18 google online imagery (http://www.google.cn/maps/vt/lyrs=s@167) created by first author (J Chen). (a) Sports field, (b) across-road bridge, (c) across-river bridge and (d) urban intersection.
Mask R-CNN is a supervised learning neural network, which requires the preparation of a training data set and a test data set. Each picture in the two data sets represents a local area in the high-resolution remote sensing image. It is necessary to mark all the sports fields, across-road bridges, across-river bridges, and urban intersections in advance for each picture.
Different marking methods are created for different types of CSOs. The regular area enclosed by the outer boundary of the stadium is used to mark a sports field, the center of the stadium is defined as the positioning point. An urban intersection is marked by the area enclosed by the zebra crossings, and the junction of the roads' center lines serves as the positioning point. And for a bridge, it marks the edge of the bridge along the river or road, and their positions can be marked by the center of the isolation belt.
The red lines in Fig. 5 indicate the marking results, and the blue dots indicate their location. There are 1204 images and 1570 labeled objects in the training data set, 200 images and 261 labeled objects in the test data set. Table 1 shows the number of sports fields, urban intersections, and bridges in the two data sets.
The loss value dropped to a relatively low level and tended to stabilize after 600 epochs of training. It is necessary to set a higher category credibility threshold in order to improve the precision of the model and try to avoid the false detection. The category credibility thresholds of sports fields, urban intersections and bridges are set to be 0.98, 0.98 and 0.97 respectively, with the higher overall precision and relatively high recall rate. The mask threshold is set to 0.5 and the extracted mask is closest to the result of manual discrimination.
The object extraction results are shown in Table 1. It can be seen that the recall rate is 81.23%, the category precision is 94.64%, and the mask precision is 81.7%. Figure 6 shows the extraction results of three typical sample regions. It can be seen from the figure that the extraction results of Mask R-CNN model are close to human interpretation. On the other hand, there are still a few wrong or missing extractions. For example, the urban intersection in the upper right corner of Fig. 6b is not recognized due to the influence of shadow, and a wrong urban intersection is extracted in the lower right corner of Fig. 6c. Therefore, it requires the image matching algorithm to be fault-tolerant and robust.

Examples of object extraction from level 18 google online imagery (http://www.google.cn/maps/vt/lyrs=s@167) created by first author (J Chen).
Parameter analysis of spatial relationship encoding and matching
Determination of the value of M
In order to find a reasonable value of M (the number of reference neighboring objects), the area within the first ring road of Chengdu is used as the test area. The 18-level data of Google online satellite imagery and Tianditu online satellite imagery are used to extract the sports fields, across-road bridges, across-river bridges, and urban intersections, and further construct their own object sets. The number of objects extracted by Mask R-CNN model from Google and Tianditu are 822 and 837 in total respectively, as shown in Table 2.
The two object sets are overlapped and the same two objects are marked as an object pair with the same identifier. The results show that there are 491 identical objects in the above object sets, accounting for 59.8% and 58.7% of the total number of objects, respectively. For each object pair, search the nearest M neighboring objects in their object sets. It is believed that the object pair contains the same neighboring object if at least one object pair in their neighboring sequence has the same identifier. Count the number of object pairs with the same neighboring object under different values of M, and the results are shown in Table 2.
As shown in Table 2, the number of object pairs with the same nearest object (M = 1) is only 202, accounting for 24.6% and 24.1% of the total number of objects, respectively. The number of object pairs which have same neighbor increases and approaches the true number of object pairs when M increases. With the computational efficiency and encoding effectiveness considered, M is set to 2 to build to the spatial relationship codes. Therefore, the nearest neighboring spatial relationship code and the second nearest neighboring spatial relationship code are constructed for each CSO.
Determination of the value of N
The above Tianditu object set and Google object set are continued to be used to find a reasonable value of N, which represents the number of nearest adjacent objects participating in spatial relationship encoding. Traverse each object of Tianditu object set and search for the matched object from Google object set when the value of α is set to 0.8 and β increases from 7 to 10. If the matched object has the same identifier, add 1 to the number of correct matches. Table 3 shows the correct matches with different value of N.
It can be seen from the table that, the number of correct matches first increases with the increase of N, and then remains stable or even decreases slightly when β is fixed. This means that a certain number of nearest objects are required to construct spatial relationship code in order to find a match. On the other hand, too many nearest objects may have a negative impact on matching to a certain extent because the objects extracted by Mask R-CNN is unreliable. Considering that the larger the value of β, the higher the requirements for the number of objects extracted from two images in the actual matching, β is set to about 7–10, so N is set to 28.
Accuracy of object matching algorithm with different values of β
The value of β represents the minimum matching number of neighbors required for object matching. Obviously, the greater the value of β, the more stringent the object matching requirements. Table 4 shows the matched number with different values of β when α and N are set to 0.8 and 28 respectively.
As can be seen from Table 4, there are only 53.3% of the matched objects are correct when β = 6. The number of total matches decreases and the matching accuracy increases with the increase of β. The correct matching rate is over 80% when β is greater than or equal to 10. However, the greater β is, the larger number of the same objects extracted from two images is needed. Therefore, it is desired to obtain a higher matching accuracy with a smaller β.
Accuracy of position matching algorithm with different values of ε
In Table 4, the matching accuracy is relatively low if only the object matching algorithm is applied. To increase the reliability of the matched pairs, further filtering using the position matching algorithm is required.
Table 5 depicts the correct rate after position matching in experimental area under different values of ε and β when a is set to 0.8. The first column in the table represents the different values of ε, which is a multiple of the cell size of the reference image. As can be seen from the figure, with the increase of distance tolerance, the total matches and the correct matches increase at the same time, but the matching accuracy decreases. It's desired to increase the total number of matches while maintaining a relatively high correct matching rate. Therefore, the distance tolerance (ε) is set to 40 times of the pixel resolution of the reference image and the matching accuracy is more than 98%.
Figure 7 shows the registration result of a typical case with our method. Figure 7a,b show the CSOs extracted from the original image and the reference image respectively. 18 control points are obtained, and the matched CSOs and registration result is shown in Fig.7c.

A typical registration result using our method: (a) extracted CSOs from original image cropped from level 18 online Tianditu imagery (http://t0.tianditu.gov.cn/img_w/wmts) created by first author (J Chen), (b) extracted CSOs from Reference image cropped from level 18 online Google imagery (http://www.google.cn/maps/vt/lyrs=s@167) created by first author (J Chen), (c) registration result.
Comparative analysis of methods
In order to verify the effectiveness of our method, taking the level 18 online remote sensing imagery as the data source, 70 image pairs of the different area are cut in China from Tianditu, Google or BingMap respectively, and more than 8 objects within the overlapping area of the original image and the reference image are guaranteed. Then, these image pairs are used to carry out image registration experiments.
Since the registration method based on image grayscale is sensitive to rotation and deformation, and the method based on Fourier transform may have a large interpolation error, some feature-based registration methods, including SIFT, ORB, BRISK, AKAZE, and SuperPoint, are selected to compare with our method. For feature-based registration methods, their respective optimal parameters are determined experimentally, and the kNN matching algorithm is applied to get the reliable control points. In our method, the values of α and β are 0.8 and 7, respectively. Equation (15) is used for all conventional methods in image registration and the same filtering process as our method is applied to ensure the max distance error is less than ε or the number of control points is less than or equals to 3. The maximum power of polynomial equation is initially set to 2 for all methods and will be reduced to 1 if the number of available control points is less than 6.
To objectively evaluate the pixel error of image registration, each original image retains its spatial coordinates, and the pixel distance of the registered coordinates relative to the original coordinates is calculated pixel by pixel. The average pixel error (APE) of each registered image is calculated, and the number of image pairs with APE less than or equal to 5, 10, 15, 50 and greater than 50 are counted. The statistical results are shown in Table 6.
Figure 8 shows some registered results with different APE. As seen from the figure, the larger the APE, the worse the result of image registration. When the APE exceeds 50 pixels, the registered image has a large position deviation and even image distortion from the original image.

Examples of registered results of the cropped image from level 18 online Tianditu imagery (http://t0.tianditu.gov.cn/img_w/wmts)with different APE, created by first author (J Chen). (a) Our method with an APEof 3.35, (b) SuperPoint with an APE of 55.53, (c) BRISK with an APE of 1204.11, (d) ORB with an APE of 1696.75.
The case is considered a failed case in this paper when the APE value is greater than 15 pixels. The number of image pairs that can be successfully registered by different methods is counted according to this criterion. In order to objectively evaluate the registration accuracy of different algorithms, the failed cases are excluded and the minimum pixel error (MINPE), maximum pixel error (MAXPE) and average pixel error of different algorithms are statistically analyzed. Table 7 shows the statistical results.
It can be seen from Table 7 that the sample cases with APE value less than 15 pixels account for 88.6% in our method, while the maximum proportion of the conventional methods is only 60.0%. Moreover, the registration error of our method is also smaller.
Method adaptability analysis
The distributing density of CSOs
The distribution density of CSOs determines whether our method can be used in any area of cities. Taking partial areas of major cities in China as examples, 18-level Google online satellite images are used to extract sports fields, across-road bridges, across-river bridges, and urban intersections.
As shown in Table 8, the distribution density of extracted objects is more than 3 per km2 within the selected cities. The two images can be registered as long as the same coverage area of the two images is greater than 3km2 if β is set to 8 and the extraction error of Mask R-CNN is ignored.
The dispersiveness of object distribution in two images is also a factor to be considered in image registration, which determines the degree of local deformation. In order to analyze the distribution characteristics of the spatial objects extracted by Mask R-CNN, the experimental areas are evenly divided into small rectangular areas according to the side length, the percentage of the areas without objects, the average number, and the maximum number of CSOs contained in these rectangular areas are counted. Table 9 shows the object distribution under different side length of each rectangular area.
Table 9 displays that at least one object shall be ensured in the rectangular area when the side length of the rectangle is more than 1 km. There will theoretically be enough objects for image registration, and the control points are relatively evenly distributed in different areas of the image, if the overlapping area of two high-resolution images exceeds 9km2.
Analysis of the influence of spatial scale differences
In order to verify the influence of spatial scale differences of remote sensing images on image registration, an image successfully registered by all methods is selected from the above cases and is scaled in multiples of 0.25, 0.5, 0.75, 1.2, 1.5, 2.0, 4.0, 8.0 and 16.0. The new images are registered with the reference image respectively. The results are shown in Table 10.
It can be seen from the table that both feature-based registration methods and our method have a suitable range of spatial scale. SIFT and AKAZE perform best among these algorithms in terms of spatial scale adaptation. Our method is applicable for spatial scale differences between 0.5 and 2 times.
Discussion
Profit by the more stable CSOs, our method performs better success rate and spatial accuracy than conventional methods based on feature points. The method can be extended to the registration of HRRSIs in rural areas by adding rural characteristic spatial object categories. However, there still are a few problems to be solved.
The first challenge is to further improve the matching accuracy, which is closely related to the distribution density and dispersiveness of the objects extracted by Mask R-CNN on the image and the accuracy of positioning points. Although object distribution density and dispersiveness has been proved to be valid to some extent for our method in some cities. The number of available same objects will be further reduced, and the distribution dispersion may not be guaranteed due to the error of Mask R-CNN in extracting objects. This may increase the error of image registration, or even fail to complete the registration. On the other hand, the error of positioning points predicted by Mask R-CNN has a direct impact on the registration accuracy. There may be large errors in the positioning points for some spatial objects with complex shape, resulting in the decline of the quality of the control points.
Another problem that needs our attention is, the robustness of spatial scale, which is also a difficult problem faced by most image registration methods. Although the matching algorithm of control points has spatial scale independence, Mask R-CNN has a certain suitable scale range and will not be able to extract CSOs correctly beyond this range, resulting in registration failure. In order to improve the independence of spatial scale, it is necessary to establish a multi-scale model for extracting CSOs.
Conclusions
In order to overcome the disadvantages of poor stability and reliability of local features, a method of automatic registration of urban HRRSIs based on CSOs is proposed. Typical urban artificial objects are selected as CSOs on the basis of the principles of being positionable, identifiable, ubiquitous, and stable, which are applied to study the automatic registration method of remote sensing images such as sports fields, across-road bridges, across-river bridges, and urban intersections. These objects and their positioning point are extracted from HRRSIs automatically by Mask R-CNN from the original image and the reference image respectively. The spatial relationship codes are also constructed according to the 28 nearest neighboring objects. The initial sequence of control points is screened by using the similarity of spatial relationship code. Then they are further screened through a position matching algorithm to obtain a relatively reliable sequence of control points. After substituting these control points into the polynomial equation and filtering out invalid ones, image matching is realized. Experimental results demonstrate that our method can register 88.6% of test images within a maximum average error of 15 pixels, compared to the maximum percentage of 60% for the best feature-based registration method (SIFT). On the other hand, the model also has quite robustness of spatial scale. When the spatial scale difference is within 0.5 and 2 times, the extracted CSOs can still be used for image registration. In future work, we will expand the categories of characteristic objects to ensure the dispersiveness of object distribution, build multi-scale model for extracting CSOs, and improve the accuracy of the positioning points. So that the performance of image registration of urban HRRSIs has been greatly improved based on CSOs.
Data availability
All data included in this study are available upon request by contact with the corresponding author.
References
Brown, M., Szeliski, R., & Winder, S. Multi-image matching using multi-scale oriented patches. In: 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05) (vol. 1, pp. 510–517). IEEE (2005).
Lucas, B., & Kanade, T. An iterative image registration technique with an application to stereo vision. In: Proceedings of the 7th International Joint Conference on Artificial Intelligence, pp. 674–679 (1981).
Forstner, W. A feature-based correspondence algorithm for image matching. Int. Arch. Photogram. Remote Sens. 26(3), 150–166 (1986).
Thirion, J. P. Image matching as a diffusion process: An analogy with Maxwell’s demons. Med. Image Anal. 2(3), 243–260. https://doi.org/10.1016/s1361-8415(98)80022-4 (1998).
Chen, P. & Gui, C. Alpha divergences based mass transport models for image matching problems. Inverse Probl. Imaging 5(3), 551–590 (2013).
Own, H. S., & Hassanien, A. E. Multiresolution image registration algorithm in wavelet transform domain. In: International Conference on Digital Signal Processing, DSP (Vol. 2, pp. 889–892) (2002). Institute of Electrical and Electronics Engineers Inc. https://doi.org/10.1109/ICDSP.2002.1028233.
Zhang, X. J. et al. Medical image registration in fractional Fourier transform domain. Optik Int. J. Light Electron Opt. 124(12), 1239–1242 (2013).
Grunkin, M., et al. Feature-based registration of sectional images. US (2014):128–133.
Yang, Q., et al. Morphological change forecasting for prostate glands using feature-based registration and Kernel density extrapolation. In: 2021 IEEE 18th International Symposium on Biomedical Imaging (ISBI), pp. 1072–1076 (2021). https://doi.org/10.1109/ISBI48211.2021.9433798.
Weixing, W. et al. Remote sensing image automatic registration on multi-scale Harris-Laplacian. J. Indian Soc. Remote Sens. 43(3), 501–511 (2015).
Niu, H. et al. Image registration on fractional Fourier transform domain. Proc. SPIE Int. Soc. Opt. Eng. 9443(1), 23–30 (2015).
Wei, N., et al. Robust image registration using subspace method in Radon transform domain. Sensor 7, 645–651 (2019)
Harris, C. Geometry from visual motion. In: Blake, A., Yuille, A. editors, Active vision, pp. 263–284. MIT Press (1992).
Bergen, J., Anandan, P., Hanna, K., & Hingorani, R. Hierachical model-based motion estimation. In: Proceedings of the 2nd European Conference on Computer Vision (ECCV92), pp. 237–252. Springer (1992).
Gioi, R., Jakubowicz, J., & Morel, J.M., et al. LSD: A fast line segment detector with a false detection control [J], pp 722–732 (2008).
Grompone von Gioi, R., Jakubowicz, J., Morel, J. -M., & Randall, G. LSD: A fast line segment detector with a false detection control. IEEE Trans. Pattern Anal. Mach. Intell. 32(4), 722–732 (2010). https://doi.org/10.1109/TPAMI.2008.300.
Kovacs, A. & Sziranyi, T. Improved harris feature point set for orientation-sensitive urban-area detection in aerial images [J]. IEEE Geosci. Remote Sens. Lett. 10(4), 796–800 (2013).
Ettarid, M. Automatic sub-pixel co-registration of remote sensing images using phase correlation and harris detector [J]. Rem. Sens. 13(12), 2314 (2021).
D. G. Lowe. Object recognition from local scale-invariant features. In: Proceedings of international conference on computer vision, pp. 1150–1157 (1999).
Hasan, M., Jia, X., Robles-Kelly, A., et al. Multi-spectral remote sensing image registration via spatial relationship analysis on sift keypoints. In: Geoscience & Remote Sensing Symposium. IEEE, pp. 1011–1014 (2010).
Etezadifar P, Farsi H . A new sample consensus based on sparse coding for improved matching of SIFT features on remote sensing images [J]. IEEE Trans. Geosci. Remote Sens. 99, 1–10 (2020).
HH Chang, Chan W C . Automatic registration of remote sensing images based on revised SIFT with trilateral computation and homogeneity enforcement [J]. IEEE Trans. Geosci. Remote Sens. 99:1–16 (2021).
Bay, H., Tuytelaars, T., Gool, L.V. SURF: Speeded up robust features[C]. In: Proceedings of the 9th European conference on Computer Vision - Volume Part I (Springer-Verlag, 2006). Pp. 404–417.
Zhi, L. S. & Zhang, J. Remote sensing image registration based on retrofitted SURF algorithm and trajectories generated from lissajous figures [J]. IEEE Geosci. Remote Sens. Lett. 7(3), 491–495 (2010).
Zhang T , Zhao R , Chen Z . Application of migration image registration algorithm based on improved SURF in remote sensing image mosaic [J]. IEEE Access, 2020, PP(99):1–1.
Leutenegger, S., Chli, M., Siegwart, R.Y. BRISK: Binary Robust invariant scalable keypoints. In: 2011 international conference on computer vision, 2011, pp. 2548–2555. https://doi.org/10.1109/ICCV.2011.6126542.
Rublee, E., Rabaud, V., Konolige, K. & Bradski, G. ORB: An efficient alternative to SIFT or SURF. Int. Conf. Comput. Vis. 2011, 2564–2571. https://doi.org/10.1109/ICCV.2011.6126544 (2011).
Zhang, Y. & Zou, Z. Automatic registration method for remote sensing images based on improved ORB algorithm[J]. Remote Sens. Land Resour. 25(3), 20–24 (2013).
Ma, D. & Lai, H. C. remote sensing image matching based improved ORB in NSCT domain [J]. J. Indian Soc. Remote Sens. 47(5), 801–807 (2019).
Wang S. Accurate registration of remote sensing images based on optimized ORB algorithms [J]. 1:57–60 (2022).
Alcantarilla, P. F., et al. KAZE features. In: European conference on computer vision, pp. 214–227 (2012).
Liu, H. & Xiao, G. F. Remote sensing image registration based on improved KAZE and BRIEF descriptor. Int. J. Autom. Comput. 17, 588–598. https://doi.org/10.1007/s11633-019-1218-3 (2020).
Alcantarilla, P. F., Nuevo, J. & Bartoli, A. Fast explicit diffusion for accelerated features in nonlinear scale spaces. In: BMVC 2013 - Electronic Proceedings of the British Machine Vision Conference 2013 (British Machine Vision Association, BMVA, 2013). pp. 13.1–13.11. https://doi.org/10.5244/C.27.13.
Liu, Y., Lan, C., Yao, F., Li, L., & Li, C. Oblique remote sensing image matching based on improved AKAZE algorithm. In: 2016 Sixth International Conference on Information Science and Technology (ICIST), pp. 448–454 (2016). https://doi.org/10.1109/ICIST.2016.7483456.
Savinov, N., Seki, A., Ladický, L., Sattler, T., Pollefeys, M. Quad-networks: unsupervised learning to rank for interest point detection. In: 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 3929–3937 (2017). https://doi.org/10.1109/CVPR.2017.418.
DeTone, D., Malisiewicz, T., Rabinovich, A. SuperPoint: Self-supervised interest point detection and description. In: 2018 IEEE/CVF conference on computer vision and pattern recognition workshops (CVPRW), pp. 337–33712 (2018). https://doi.org/10.1109/CVPRW.2018.00060.
He, K., Gkioxari, G., Dollar, P. & Girshick, R. Mask R-CNN. In: 2017 IEEE International Conference on Computer Vision (ICCV), pp. 2980–2988 (2017). https://doi.org/10.1109/ICCV.2017.322.
Naufal, A., Fatichah, C. & Suciati, N. Preprocessed mask RCNN for parking space detection in smart parking systems. Int. J. Intell. Eng. Syst. 13(6), 255–265 (2020).
Ren, S. et al. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 39(6), 1137–1149 (2017).
Jiang, H., & Learned-Miller, E. Face detection with the faster R-CNN. In: IEEE International Conference on Automatic Face & Gesture Recognition IEEE, pp. 650–657 (2017).
Acknowledgements
This work is supported by National key R&D plan (2018YFB0505300) and science and technology projects of SiChuan Province (2020YFG0146). The authors have no relevant financial or no-financial interests to disclose.
Funding
This article was funded by National key R&D plan (2018YFB0505300), Science and technology projects of SiChuan Province (2020YFG0146).
Author information
Authors and Affiliations
Contributions
J.C. wrote the paper; Z.Y. proposed the method; C.Y. supported this research. K.Y. supported this research.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Chen, J., Yu, Z., Yang, C. et al. Automatic registration of urban high-resolution remote sensing images based on characteristic spatial objects. Sci Rep 12, 14432 (2022). https://doi.org/10.1038/s41598-022-15119-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-022-15119-4
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
