
Abstract
Understanding how herbivores shape plant biomass and distribution is a core challenge in ecology. Yet, the lack of suitable remote sensing technology limits our knowledge of temporal and spatial impacts of mammal herbivores in the Earth system. The regular interannual density fluctuations of voles and lemmings are exceptional with their large reduction of plant biomass in Arctic landscapes during peak years (12–24%) as previously shown at large spatial scales using satellites. This provides evidence that herbivores are important drivers of observed global changes in vegetation productivity. Here, we use a novel approach with repeated unmanned aerial vehicle (UAV) flights, to map vegetation impact by rodents, indicating that many important aspects of vegetation dynamics otherwise hidden by the coarse resolution of satellite images, including plant–herbivore interactions, can be revealed using UAVs. We quantify areas impacted by rodents at four complex Arctic landscapes with very high spatial resolution UAV imagery to get a new perspective on how herbivores shape Arctic ecosystems. The area impacted by voles and lemmings is indeed substantial, larger at higher altitude tundra environments, varies between habitats depending on local snow cover and plant community composition, and is heterogeneous even within habitats at submeter scales. Coupling this with spectral reflectance of vegetation (NDVI), we can show that the impact on central ecosystem properties like GPP and biomass is stronger than currently accounted for in Arctic ecosystems. As an emerging technology, UAVs will allow us to better disentangle important information on how herbivores maintain spatial heterogeneity, function and diversity in natural ecosystems.
Similar content being viewed by others
Introduction
Ecologists have long aimed to acquire a better spatial understanding of the influence herbivores have on vegetation1,2. Herbivores are worldwide known to influence plant biomass, community structure and diversity2,3,4, but the impact of herbivores is not spread even across landscapes5,6. There are many drivers of heterogeneity in herbivore density, behaviour and finally impact on the vegetation. The most obvious drivers might be physical barriers such as steeps or water bodies making areas unavailable for herbivores7. An equally self-evident driver of spatial heterogeneity is food availability. Herbivores are known to select the landscape unit richest in resources, then the most productive communities within the landscape, down to the most palatable species within a feeding station. This creates a gradient of herbivory intensity across scales8. Access to other resources such as water5, minerals9 or burrows10 might also generate heterogeneity in herbivore distribution and impact on the vegetation. Predators are another factor generating heterogeneity in herbivore impact on the vegetation through trophic cascades11. The density of predators might determine the impact of herbivores on the vegetation via population12,13 or behaviour responses1.
To understand the importance of herbivory for ecosystem structure and function, we do not only need to understand the intensity of the interactions between herbivores and plants, but also their spatial heterogeneity5. Different plant communities respond in contrasting ways to the same level of herbivory14, and the same habitats may respond differently to patchy and homogenous grazing5. Therefore, different spatial configurations of herbivory will impact ecosystem heterogeneity at different spatial scales5. Heterogeneous landscapes are expected to have a higher species diversity15, higher stability16 and a higher ability to buffer effects of a warming climate7. A high spatial heterogeneity within the scale of our measurement might also cause underestimation of vital ecosystem properties such as plant biomass, GPP or soil organic carbon17,18.
Compared to the comprehensive understanding of plant–herbivore interactions in general, the knowledge about the variation of these interactions in space is still rudimental. To a large part this is due to limited capability of remote sensing to assess the effect of herbivory3. This knowledge gap reflects the difficulty of studying and quantifying the heterogeneity at scales relevant to mammalian herbivores. The strong population fluctuation of many herbivores in northern ecosystems19 provides a unique opportunity to study the impact of herbivores at large spatial scales by comparing conditions before and after a population peak using remote sensing techniques. This approach has been used to study the impact of different types of herbivores ranging from reindeer population peaks20 to insect outbreaks21. One spectacular example of such fluctuations are vole and lemming cycles that are a common feature of Arctic ecosystems22, and drive synchronous interannual fluctuations in biomass of field-layer vegetation with reductions of (12–24%) during cycle peak years, which are visible as a reduced normalized difference vegetation index (NDVI) in satellite images in the following year23. The impact of the voles and lemmings on the vegetation is a heterogeneous mix of heavily impacted runways and patches around burrows24, where the total removal of vegetation results in strongly reduced NDVI, intermingling with virtually unaffected areas (Fig. 1). The coarse resolution of satellite images severely restricts the ability to study the spatial distribution of the herbivore impact, especially in Arctic landscapes which are highly heterogeneous at meter to sub-meter scales17,25,26,27. Unmanned aerial vehicles (UAVs) have emerged as a new technology in ecology28 and provide the opportunity to survey landscapes over large areas at high spatial resolution17,29. Low cost and temporal flexibility allow to use them for seasonal monitoring or targeted field campaigns 17,28 and they have proven to provide reliable truecolor and multispectral data even in challenging Arctic locations 17,29.

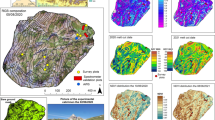
(a) Location of the study area in the Arctic. Ecoregions of the Tundra and Boreal Forest/Taiga biomes30 where vole and lemming cycles are common22. Study setup with four study areas paired for oceanic and continental climate, and low altitude forest line tundra and higher altitude open tundra. RGB and multispectral UAV imagery was recorded at all sites and the NDVI was derived as an index for vegetation productivity6. (b) UAV imagery for 2018 and 2019 of the same selected area with ground truth plots showing rodent impact in form of nests and runways that appear as brown areas in the RGB imagery (b top row) and as reduced NDVI (b bottom row left and middle) in previously homogeneous vegetation cover of mesic tundra. Mapped land cover and rodent impact for the same area (b bottom row right). (c) Combined regional vole and lemming catch rates for 1998–2020. Vertical line indicate time of UAV flights in summer 2018 and 2019. The time-series indicates a comparatively low rodent peak for 2018. See Supplementary Fig. S1 in the supplement for detailed time-series differentiating for voles, lemmings, oceanic and continental area. (d) Images show a grey sided vole harvesting vegetation and examples of the impact on vegetation and traces left by rodents including runways, clipped vegetation, woody remains with bite marks and feces droppings. Figure created in QGIS 3.18 (qgis.org), Made with Natural Earth (naturalearthdata.com), Regional imagery: European Environment Agency (EEA) and Lantmäteriet.
In this article, we aim to provide a novel understanding on the spatial dimension of herbivory, and highlight the substantial potential of UAVs to address important knowledge gaps in plant herbivore interactions. We used repeated UAV flights equipped with RGB and multispectral sensors in four 15–21 hectare large areas during (2018) and after (2019) a vole and lemming peak in the tundra in northernmost Sweden to survey the impact of rodent peaks with a high spatial resolution at landscape scale (Fig. 1). We verified that the detected changes in vegetation productivity were indeed due to vole and lemming impact through visual comparison of RGB and multispectral UAV imagery from 2018 to 2019 (Fig. 1), and by comparing the estimated impact based on multispectral data with field recorded impact in ground truth investigations (Fig. 2; Supplementary Fig. S2). Our ground truth inventory recorded traces of vole and lemming activity apparent as bite marks in vegetation, clipped vegetation remains, droppings, burrows or runways31. The impact is visible in the field as missing or dead vegetation, leading to browning of the surface (Fig. 1) and reduced vegetation productivity when measured using the NDVI in the field, from satellites10 and in our UAV imagery (Fig. 1). We observed rodent nest sites covering patches of 0.3–1 m diameter associated with burrows and cavities and cleared of vegetation. Runways that are used for movement under snow, were visible as linear features in the UAV imagery. We also observed extensive impact where low growth tundra vegetation has been thinned out over large areas (Fig. 1, Supplementary Fig. S3). Only inventoried impacts that were clearly attributable to voles or lemmings were included as control data. Other vegetation damage, such as reindeer herbivory or fungal die-off, were not included as rodent impact in our ground control (Fig. 2). Further, we mapped habitats at each study area using an object-based land cover classification approach appropriate for complex Arctic terrain18,32.

(a) Relationship between rodent impact field inventory count in 2 m × 2 m field plots and UAV derived NDVI change for all habitats combined (r2 = 0.54; p = < 0.001; grey shadow = 95% CI). (b) Comparison of rodent impact count in 2 m × 2 m field plots for different habitats. Dry tundra and barren, as well as wetland and meadow habitat types were aggregated.
Our results show, that the field inventory of rodent impact was linearly correlated with NDVI change between 2018 and 2019 in ground control plots (Fig. 2a, r2 = 0.540). Both the r2 values and slope estimates differed between habitats and was highest in the low productive and structurally simple heath habitats, and lower in the more complex willow, forest and wetland patches (Fig. 2b). We mapped rodent impacted areas in the UAV imagery in separate best estimate, minimum and maximum scenarios. The impact was mapped by applying a threshold of negative NDVI change between two years and masking of habitats. The resulting maps aligned well with our field inventory count of rodent impact in our control plots (Supplementary Fig. S2). However, the traditional ground truth estimate of herbivory impacts by counting impacted quadrants that we used31 is not an exact quantitative measurement of rodent impact either, but the strong relationship between different measures (UAV and ground truth) supports that both methods successfully estimate comparable key aspects of vole and lemming impacts but in different ways.
Our long-term rodent trapping time-series indicates a rodent peak in autumn 2018 (Fig. 1c, Supplementary Fig. S1)22 and the absence of a lemming peak. During the past two decades, vole populations have fluctuated in 3-to-5-year population cycles, with synchronous lemming peaks accompanying some of the vole peaks (Supplementary Fig. S1)23. The peak in 2018 was the lowest during the whole time-series (Fig. 1c) and no lemmings were trapped (Supplementary Fig. S1), although winter nests, dead lemmings and feeding marks on vegetation indicate that lemmings were detected at least in the KJ site. In general, the high impact of rodents is known to happen during the autumn and winter after peak densities are recorded in the trapping, and thus observed the following year in the vegetation23,24,33,34. The fairly small vole and lemming peak in 2018 thus resulted in a relatively small reduction in plant biomass (4–16%), GPP (3–12%) and NDVI (0.7–4%) compared to previous peaks during the last two decades (Table 1)23, but rodents still impacted between 4.5 and 18.9% of the landscape according to our best estimate from the UAV data (Fig. 3, Table 1). This supports previous studies identifying voles and lemmings as drivers of Arctic vegetation23,33,35,36,37, and indicate that even small peaks have substantial impacts on ecosystems although it would be hard to record using traditional methods linking field plots or satellites23.

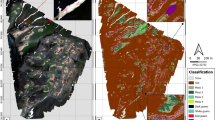
(a) Habitats (land cover classifications) for each study area. (b) Mapped vole and lemming impact according to the best estimate scenario (blue) over truecolor RGB UAV imagery. Figure created in QGIS 3.18 (www.qgis.org).
Furthermore, we can quantify the spatial heterogeneity of the rodent impact across scales. At regional scale, across all four study areas, the mapped rodent impact was higher in the oceanic locations than in the continental and in the high-altitude sites (NT, KJ) than in the low altitude sites (NF, VJ; Fig. 3; Table 1). The higher impact levels in oceanic (VJ, KJ) than in continental locations (NF, NT) are supported by higher rodent densities in the oceanic region than in the continental region (Supplementary Fig. S1) and could be linked to in average deeper snow in most habitats. This maintains a larger fraction of the landscape as a snow covered and suitable habitat at local scale, creating more favourable conditions for rodents during winter and extended snow seasons17,38. The higher impact in high altitude sites does, on the other hand, support previous studies proposing that herbivory impact in the tundra is higher in high altitude sites with typically lower predator densities than in low altitude sites where predators thrive12,39. At local scale, the level of mapped rodent impact differed across the different habitat classes within each location (Fig. 4). The moist and fairly snow-rich Betula nana heath, willow shrubs, snowbeds and semi-wetlands were heavily impacted in all locations while barren habitats and graminoid meadows were lightly impacted in all locations reflecting often poor snow conditions. Dry heath and mesic heath habitats experienced contrasting rodent impact among locations with a low impact in the most snow poor location (continental tundra) and high impact in the typically snow rich oceanic locations. These habitats are probably below the snow threshold to be suitable winter conditions for voles and lemmings in the continental tundra location24 where we rarely observe more than 10 cm of snow cover during winter23, while the snow cover might be enough at the snow-rich oceanic locations. The impact in the birch forest is mixed. This might be the result of a heterogeneous habitat with dry and wet vegetation or linked to methodological aspects in detecting rodent impact in complex habitats (Fig. 2b).

(a) Mapped land cover area for each study area (background bars) and rodent impact for the best estimate (full color bars), minimum and maximum (error bars) scenarios (% of total area excluding water). (b) Rodent impact fraction (%) within each respective land cover class for the best estimate (full color bars), minimum and maximum (error bars) scenarios.
Although, these results correspond with previous findings in descriptive and experimental studies23,24,40,41,42, this is the first time the heterogeneity of the impact has been quantified at this large spatial scale, which is a prerequisite for incorporating the results in earth ecosystem models or other large-scale upscaling approaches43 in a sophisticated way. At habitat scale, the rodent impact was highly aggregated even at pixel resolution (11–13 cm). This is evident from high Moran’s I (> 0.5; Table 1), the range > 4.5 m for spatial-autocorrelation in variograms of rodent impact (Supplementary Fig. S4, Table 1), and the heterogeneous impact even within habitats (Fig. 3). This is the first time the heterogeneity of the impact of herbivores has been quantified at such detail across such large areas and reveals that the heterogeneity is large enough to matter for the way we can analyse the effect of herbivores on ecosystem structure and function using remote sensing products17. Albeit tools like GPS collars have resulted in rapid advances in movement ecology44, just data on the activity of the herbivores does not reveal their impact on the vegetation. Quantifying the heterogeneity of the impact of herbivores on ecosystems is very important since it will influence the heterogeneity of landscapes and thus species diversity15, ecosystem stability16 and a resistance to effects of a warming climate7.
This study gives a new perspective on the impact by rodents on Arctic ecosystems. Even this small rodent peak, the by far weakest during the last decades (Fig. 1c), caused a decrease in NDVI of 0.7–4.2% at landscape scale and thus comparable in effect size to other events considered highly important45, severely impacted up to 19% of the landscape (Fig. 4, Table 1), and had even more pronounced effects on certain habitats (Fig. 4). Given that vole and lemming populations experience population fluctuations across the Arctic22, rodent peaks should be important disturbance events in almost the entire biome. The slow growth rates of low productive Arctic vegetation23, result in the Arctic tundra being a mosaic of patches in different successional stages with implications for plant community composition and plant nutrient content36. Quantifying the heterogeneity of rodent impacts using UAVs makes it possible to estimate the importance of rodents on fundamental aspects of Arctic ecosystems, i.e. productivity, carbon storage, biodiversity and responses to a changing climate. The productivity of the tundra at panArctic scales is often estimated through increases in NDVI (spectral greening; increased productivity) or decreases (browning; decreased productivity)45, since NDVI and other indexes derived from satellites correlate well with gross photosynthesis46. Although the greening trends are known to be heterogeneous among regions and habitat45, our results record a high heterogeneity even at sub-meter scale (Fig. 1) and spatial autocorrelation with a range > 4.5 m (Supplementary Fig. S4). This is important since it means that the greening or browning of satellite pixels (10–500 m) is the result of heterogeneous changes at subpixel scale, and that the configuration of environmental conditions and rodent disturbance might be responsible for changes in spectral greening or browning rather than pixel means, hence compromise an important scaling effect17. Since the relationship between gross primary production and NDVI is nonlinear, determining the effect of a heterogeneous impact like rodent peaks will severely underestimate their importance on ecosystem productivity if this heterogeneity is not estimated and considered (see Siewert and Olofsson17 for an in depth explanation of this scaling mechanism). This mosaic of areas in different successional stages of vegetation is expected to strongly promote species diversity by preventing competitive exclusion and by inducing environmental heterogeneity15. Finally, the mapped heterogeneity hints at a new perspective on how these ecosystems may respond to a given climate scenario. A changing climate is expected to result in changes of the population dynamics22 as well as habitat selection47 of voles and lemmings. Our results are consistent with previous conclusions that crashing vole and lemming populations due to warm winter conditions in the southern edge of their distribution range could drive large ecosystem changes in the future48, and that changes in their behaviour and habitat choice influence land cover heterogeneity and thus structure and function of Arctic ecosystems well before population crashes are detected. Such dynamics are presently not integrated in major Arctic ecosystem assessments, but UAV data can clearly help to integrate this.
Our estimate shows very good agreement with ground control data (Fig. 2, Supplementary Fig. S2) and demonstrates the potential of UAV imagery to generate a better understanding of impacts of herbivory at the scale of the process. Further, long-term monitoring may provide insights at landscape scale without disturbance by human presence, that would previously have been restricted to elaborate field campaigns or large scale controlled experiments39. However, our analysis is also facing a few uncertainties. For capture and processing of the UAV imagery, we harmonized relevant factors, e.g. weather conditions, programmed flight patterns and processing presets whenever possible and following best practices29. UAV maps are composites of several hundred images leading to minor differences in geometric positioning of pixels between years (i.e. co-registration) and artefacts in change detection which risks overestimation of the rodent impact. Weather and logistical constraints prohibited identical light conditions between years for all areas while environmental conditions change naturally. The mapped and ground-truthed rodent impact was not directly proportional to the reduction in NDVI across all four study sites, indicating that other factors also influenced the NDVI at this scale. Yet, the highest impacted area (KJ: 19%), also had the strongest reduction in NDVI (− 4.2%), GPP (− 12.4%) and biomass (− 15.7%). The relationship of NDVI with derived GPP and biomass is subject to a number of assumptions, and to some extent habitat and location specific17,45,46. Environmental factors leading to potential under- or overestimation may include inter-annual differences in vegetation productivity, seasonal variation of water ponds or surface wetness at the time of the UAV flight. Climate and season length were fairly similar both years 2018 and 2019 compared to for instance 2017 and 2020. Further, the impact of rodents is strongest in the field layer of vegetation, but in complex habitats, this may be obscured in the aerial view under canopy-forming vegetation including willow or birch tree patches. Our method using a threshold of NDVI reduction is only sensitive when this threshold is met thus risking underestimation. The complexity of the terrain offers a varied insight into herbivory dynamics, but increases the challenge to generate land cover maps showing habitats. We addressed these uncertainties with best estimate, minimum and maximum scenarios that we generated using different thresholds, and masking of certain habitats. As the same thresholds are applied per study area, the rodent impact might be over- or underestimated in the different habitats depending on environmental conditions, but we are confident that the estimates are fairly accurate, shown by the close correspondence to ground control estimates (Fig. 2, Supplementary Fig. S2), and that the real rodent impact is within the range of these scenarios.
The low productivity and low statured vegetation17,29,49 combined with the distinct population peaks of the major herbivores22 make the Arctic tundra especially suitable for quantifying the heterogeneity of herbivore impact using UAVs. The results indicate that large areas are impacted even during a small rodent peak. Mapping the extent and heterogeneity of the impact by rodents at large spatial scales is a vital step to produce results that can be incorporated in scenarios or ecosystem models and thus fully accounting for this process in our understanding of ecosystem changes and ecosystem projections. In general, we consider UAVs to be a very promising method to understand key herbivory and ecosystem dynamics, especially when combined with tools such as exclosures, GPS collars and satellite images.
Methods
Study area
Four areas with an extent of 15–21 ha (~ 350 m × ~ 500 m) were studied in a paired setup in the Torneträsk region, northern Sweden. The setup covers at large the climatic variability of the Fennoscandian forest-tundra ecotone. Two continental sites are situated near the Nissonjokka gorge about 10 and 15 km southwest of Abisko (Nisson forest; NF; 525 m.a.s.l.; (68° 19′ N, 18° 49′ E) and Nisson tundra; NT; 690 m.a.s.l.; 68° 18′ N, 18° 50′ E). The mean annual air temperature (MAAT) was − 0.8 °C for the 1961–90 reference period, while mean annual precipitation (MAP) was 304 mm for the same interval (Abisko Scientific Research Station). Two sites with an oceanic climate (1961–90: − 2 °C MAAT; 844 mm MAP; Kåtterjokk) are situated east of lake Vassijaure (VJ; 490 m.a.s.l. 68° 26′ N, 18° 15′ E) and 1.5 km south of Katterjokk (KJ; 600 m.a.s.l; 68° 24′ 43″ N, 18° 08′ E). The treeline is formed by mountain birch (Betula pubescens ssp. czerepanovii) forests as is typical for Fennoscandia. The lower altitude sites (NF, VJ) feature patches of open heath tundra, mountain birch forest and wetlands. The higher altitude sites (NT, KJ) are dominated by open heath tundra and barren terrain interrupted by shrub, snowbed communities, graminoid meadows and minor mountain birch stands. Bedrock is nutrient-poor in all four areas. Dominant species for heath communities are Vaccinium vitis-idaea, Vaccinium myrtillus, Empetrum hermaphroditum and Betula nana. Dense shrub communities are formed by Salix spp. and Betula nana.
Rodent field inventory
Vole and lemming population densities were monitored separately for the continental and the oceanic region in spring and fall since 199823. The catch rate reflects individuals per 100 trap nights using the small quadrat survey method23,50. In 2019 during the early vegetation season (June–July), we inventoried rodent impact on vegetation and traces in five paired ground control plots (2 m × 2 m) per study area totalling 40 plots. These were laid out in selected heavily grazed (impacted) and relatively ungrazed (control) areas. Plot pairs were only set in a subset of the most representative habitats due to the labour intensity of the method. Rodent herbivory was recorded in a raster of 0.1 m × 0.1 m quadrants within these plots, approximating the resolution of the UAV imagery (400 total quadrants per plot). Observed impact was categorized in vegetation bite marks, feces droppings, runways and burrows. Each impact was given 1 point with multiple impacts possible per quadrant. These were then summed per plot. All ground plots were georeferenced using DGPS. For the impact inventory, this was controlled using markers at 1 m distance to the plot visible in the UAV imagery. This allowed to extract the NDVI from the UAV imagery on a plot basis.
UAV data
We recorded UAV imagery using an eBee fixed-wing mapping drone (senseFly, Switzerland) with Sequoia multi-spectral (Parrot, France) and G9X RGB (Canon, Japan) cameras. For the assessement of rodent impact, imagery was recorded during vegetation peak productivity between July 27th and August 4th in 2018 and 2019. Additional imagery from right after snowmelt in June and in September was used to construct land cover classifications. The Sequoia sensor provides imagery in green, red, red-edge and near-infrared bands (G, R, RE, NIR). The normalized difference vegetation index (NDVI) was extracted using the R and NIR bands. Radiometric calibration was performed using spectral reflectance panels (MosaicMill, Finland). The multispectral imagery had a ground resolution of 11.4–13.5 cm depending on flight and area after photogrammetric processing using Pix4Dmapper (Pix4D SA, Switzerland). The RGB imagery had a resolution of (1.5–3.3 cm). The UAV imagery was georeferenced with 4–8 ground reference markers using centimeter precision DGPS. Co-registration of the multispectral UAV imagery between 2018 and 2019 was generally near pixel-perfect and did mostly not deviate more than 2–3 pixel for locations within the analyzed core mapping area. Fine-registration algorithms available in Orfeo Toolbox v. 7.151 and RStoolbox52 were tested, but did not further improve the co-registration and were thus not applied.
Land cover maps
Object-based land cover maps reflecting different ecological habitats were generated for each study area as is appropriate for highly heterogeneous Arctic study areas18,32. First, the area was segmented based on four UAV bands (G, R, RE, NIR) at a resolution of 0.3 m using mean shift segmentation from Orfeo Toolbox v. 7.151. Environmental data to inform the classification was extracted from early seasonal, peak seasonal and late seasonal UAV flights of 2018 using the spectral bands and the NDVI. Additional topographic layers were generated either from the UAV imagery or the Swedish national elevation data at 2 m resolution or laser data (Lantmäteriet). These additional layers were vegetation height, catchment slope, wetness index (SAGA)53, relative slope position and slope. Based on the environmental data, the segments were then classified using a random forest machine learning classifier54. Training areas were identified in the RGB UAV imagery and on field photographs. The classes describe common Arctic land cover types and reflect potential vole and lemming habitats (Supplementary Methods for a description). Accuracy was assessed using the out-of-bag error, Overall Accurcay and the Kappa index (Supplementary Discussion). Rodent impact was subsequently extracted per land cover class.
Rodent impact mapping from UAV imagery
Rodent impact in the UAV imagery can be identified as change from the 2018 to the 2019 imagery. Many change detection methods exist in remote sensing55,56. We reviewed and tested several methods to map the impact of rodents on vegetation. The visually detectable impact in the UAV imagery is as fine-grained as the pixel resolution. Therefore, only pixel-based and no object-based change detection methods were considered. The tested methods included raster math (also termed image differencing), principal component analysis (PCA), change vector analysis (CVA), direct binary classification using machine learning and multivariate alteration detector (MAD)55,56. These were applied to either the full set of multispectral bands (G, R, RE, NIR) or to the extracted NDVI imagery. After initial results we selected raster math subtracting the 2019 NDVI imagery from 2018 NDVI imagery as the best performing method. Other results are not presented. The selection criteria were visual detection of rodent impact in agreement with the higher resolution RGB imagery comparing 2018–2019, and robustness against artefacts and overestimation. The 2018 NDVI imagery was resampled to match the raster grid of the 2019 imagery using the nearest neighbour algorithm. This improved the co-registration of the imagery and reduced artefacts in the final result.
The raster math method provided maps showing quantitative changes in NDVI from 2018 to 2019. A threshold of reduction in NDVI was selected to subset the maps to reflect rodent impacts. At known field locations with photographs and from the RGB imagery, we observed areas of intensive impact, such as major vegetation grazing, nests and runways clearly identifiable as brown patches replacing previously intact vegetation cover, but also extensive impact such as individual clipped plants thinning out the vegetation cover (Fig. 1d, Supplementary Fig. S3). The change detection was sensitive to artefacts from photogrammetric processing, changing light and moisture conditions between flights. To accommodate for this, we applied three impact scenarios of best estimate, minimum and maximum rodent impact for each area. The selected threshold varied between study area and scenario (− 0.04 to − 0.1 NDVI). Further, we used the land cover classification to mask different habitats in which we assumed mapped impact to be a potential artefact or overestimate, again depending on different scenarios.
We also extracted changes in NDVI, standing biomass and gross primary productivity (GPP) from 2018 to 2019 as well as mapped rodent impact (best estimate scenario) as mean per study area. Biomass and GPP were derived by applying regression formulas following Siewert and Olofsson17.
Spatial autocorrelation was measured by calculating Moran’s I using the R ‘raster’ package57 and variograms using the ‘gstat’ package58 from the rodent impact best estimate raster maps. Values for Moran’s I range between − 1 to 1 with values close to 1 indicating strong autocorrelation and clustering, − 1 indicating perfect dispersal and 0 indicating spatial randomness59. Experimental variograms were generated by drawing a random sample of 100,000 pixels of the raster maps and a width of 0.3 m. Different variogram models were tested and a double exponential term proofed to provide the best approximation.
Data availability
All data handling, processing and statistical analyses was performed using R statistical software60 unless mentioned otherwise. Data was visualized using R60 or QGIS61. The code for this study, supporting table and vector data is available from the code repository of the corresponding author. The UAV NDVI orthomaps and the land cover classification data will be made available through the PANGAEA scientific repository (https://pangaea.de/) upon publication and will be available through the search function in the repository. The UAV RGB orthomaps are available upon reasonable request.
References
Atkins, J. L. et al. Cascading impacts of large-carnivore extirpation in an African ecosystem. Science 364, 173–177 (2019).
Borer, E. T. et al. Herbivores and nutrients control grassland plant diversity via light limitation. Nature 508, 517–520 (2014).
Hempson, G. P., Archibald, S. & Bond, W. J. A continent-wide assessment of the form and intensity of large mammal herbivory in Africa. Science 350, 1056–1061 (2015).
Schmitz, O. J. Herbivory from individuals to ecosystems. Annu. Rev. Ecol. Evol. Syst. 39, 133–152 (2008).
Adler, P., Raff, D. & Lauenroth, W. The effect of grazing on the spatial heterogeneity of vegetation. Oecologia 128, 465–479 (2001).
Olff, H. & Ritchie, M. E. Effects of herbivores on grassland plant diversity. Trends Ecol. Evol. 13, 261–265 (1998).
Weeber, J., Hempson, G. P. & February, E. C. Large herbivore conservation in a changing world: Surface water provision and adaptability allow wildebeest to persist after collapse of long-range movements. Glob. Change Biol. 26, 2841–2853 (2020).
Senft, R. L., Rittenhouse, L. R. & Woodmansee, R. G. Factors influencing patterns of cattle grazing behavior on shortgrass steepe. Rangel. Ecol. Manag. Range Manag. Arch. 38, 82–87 (1985).
McNaughton, S. J., Banyikwa, F. F. & McNaughton, M. M. Promotion of the cycling of diet-enhancing nutrients by African grazers. Science 278, 1798–1800 (1997).
Olofsson, J., De Mazancourt, C. & Crawley, M. J. Spatial heterogeneity and plant species richness at different spatial scales under rabbit grazing. Oecologia 156, 825–834 (2008).
Estes, J. A. et al. Trophic downgrading of planet Earth. Science 333, 301–306 (2011).
Oksanen, L., Fretwell, S. D., Arruda, J. & Niemela, P. Exploitation ecosystems in gradients of primary productivity. Am. Nat. 118, 240–261 (1981).
Oksanen, T. et al. The impact of thermal seasonality on terrestrial endotherm food web dynamics: A revision of the Exploitation Ecosystem Hypothesis. Ecography 43, 1859–1877 (2020).
Fine, P. V. et al. The growth–defense trade-off and habitat specialization by plants in Amazonian forests. Ecology 87, S150–S162 (2006).
Chesson, P. Mechanisms of maintenance of species diversity. Annu. Rev. Ecol. Syst. 31, 343–366 (2000).
Oliver, T., Roy, D. B., Hill, J. K., Brereton, T. & Thomas, C. D. Heterogeneous landscapes promote population stability. Ecol. Lett. 13, 473–484 (2010).
Siewert, M. B. & Olofsson, J. Scale-dependency of Arctic ecosystem properties revealed by UAV. Environ. Res. Lett. 15, 094030 (2020).
Siewert, M. B. High-resolution digital mapping of soil organic carbon in permafrost terrain using machine learning: A case study in a sub-Arctic peatland environment. Biogeosciences 15, 1663–1682 (2018).
Post, E. et al. Ecological dynamics across the Arctic associated with recent climate change. Science 325, 1355–1358 (2009).
Newton, E. J., Pond, B. A., Brown, G. S., Abraham, K. F. & Schaefer, J. A. Remote sensing reveals long-term effects of caribou on tundra vegetation. Polar Biol. 37, 715–725 (2014).
Eklundh, L., Johansson, T. & Solberg, S. Mapping insect defoliation in Scots pine with MODIS time-series data. Remote Sens. Environ. 113, 1566–1573 (2009).
Ehrich, D. et al. Documenting lemming population change in the Arctic: Can we detect trends?. Ambio https://doi.org/10.1007/s13280-019-01198-7 (2020).
Olofsson, J., Tømmervik, H. & Callaghan, T. V. Vole and lemming activity observed from space. Nat. Clim. Change 2, 880–883 (2012).
Hambäck, P. A., Schneider, M. & Oksanen, T. Winter herbivory by voles during a population peak: The relative importance of local factors and landscape pattern. J. Anim. Ecol. 67, 544–553 (1998).
Siewert, M. B. et al. Comparing carbon storage of Siberian tundra and taiga permafrost ecosystems at very high spatial resolution: Ecosystem carbon in taiga and tundra. J. Geophys. Res. Biogeosciences 120, 1973–1994 (2015).
Virtanen, T. & Ek, M. The fragmented nature of tundra landscape. Int. J. Appl. Earth Obs. Geoinf. 27(Part A), 4–12 (2014).
Siewert, M. B., Lantuit, H., Richter, A. & Hugelius, G. Permafrost causes unique fine-scale spatial variability across tundra soils. Glob. Biogeochem. Cycles 35, e2020GB006659 (2021).
Koh, L. P. & Wich, S. A. Dawn of drone ecology: Low-cost autonomous aerial vehicles for conservation. Trop. Conserv. Sci. 5, 121–132 (2012).
Assmann, J. J., Kerby, J. T., Cunliffe, A. M. & Myers-Smith, I. H. Vegetation monitoring using multispectral sensors—best practices and lessons learned from high latitudes. J. Unmanned Veh. Syst. 7, 54–75 (2018).
Olson, D. M. et al. Terrestrial ecoregions of the world: A new map of life on earth. Bioscience 51, 933 (2001).
Barrio, I. C. et al. Herbivory network: An international, collaborative effort to study herbivory in Arctic and alpine ecosystems. Polar Sci. 10, 297–302 (2016).
Siewert, M. B., Hugelius, G., Heim, B. & Faucherre, S. Landscape controls and vertical variability of soil organic carbon storage in permafrost-affected soils of the Lena River Delta. CATENA 147, 725–741 (2016).
Olofsson, J. et al. Long-term experiments reveal strong interactions between lemmings and plants in the fennoscandian highland tundra. Ecosystems 17, 606–615 (2014).
Virtanen, R., Parviainen, J. & Henttonen, H. Winter grazing by the Norwegian lemming (Lemmus lemmus) at Kilpisjärvi (NW Finnish Lapland) during a moderate population peak. Ann. Zool. Fenn. 39, 335–341 (2002).
Johnson, D. R. et al. Exclusion of brown lemmings reduces vascular plant cover and biomass in Arctic coastal tundra: resampling of a 50 $\mathplus$ year herbivore exclosure experiment near Barrow, Alaska. Environ. Res. Lett. 6, 045507 (2011).
Petit Bon, M. et al. Interactions between winter and summer herbivory affect spatial and temporal plant nutrient dynamics in tundra grassland communities. Oikos 129, 1229–1242 (2020).
Virtanen, R., Henttonen, H. & Laine, K. Lemming grazing and structure of a snowbed plant community: A long-term experiment at Kilpisjärvi, Finnish Lapland. Oikos 79, 155–166 (1997).
Domine, F. et al. Snow physical properties may be a significant determinant of lemming population dynamics in the high Arctic. Arct. Sci. 4, 813–826 (2018).
Aunapuu, M. et al. Spatial patterns and dynamic responses of arctic food webs corroborate the exploitation ecosystems hypothesis (EEH). Am. Nat. 171, 249–262 (2008).
Hoset, K. S., Kyrö, K., Oksanen, T., Oksanen, L. & Olofsson, J. Spatial variation in vegetation damage relative to primary productivity, small rodent abundance and predation. Ecography 37, 894–901 (2014).
Hoset, K. S. et al. Changes in the spatial configuration and strength of trophic control across a productivity gradient during a massive rodent outbreak. Ecosystems 20, 1421–1435 (2017).
Lindén, E., Gough, L. & Olofsson, J. Large and small herbivores have strong effects on tundra vegetation in Scandinavia and Alaska. Ecol. Evol. 11, 12141–12152 (2021).
Fulton, E. A., Blanchard, J. L., Melbourne-Thomas, J., Plagányi, É. E. & Tulloch, V. J. D. Where the ecological gaps remain, a Modelers’ perspective. Front. Ecol. Evol. 7, 424 (2019).
Owen-Smith, N., Fryxell, J. M. & Merrill, E. H. Foraging theory upscaled: The behavioural ecology of herbivore movement. Philos. Trans. R. Soc. B Biol. Sci. 365, 2267–2278 (2010).
Myers-Smith, I. H. et al. Complexity revealed in the greening of the Arctic. Nat. Clim. Change 10, 106–117 (2020).
Street, L. E., Shaver, G. R., Williams, M. & Van Wijk, M. T. What is the relationship between changes in canopy leaf area and changes in photosynthetic CO2 flux in arctic ecosystems?. J. Ecol. 95, 139–150 (2007).
Morris, D. W., Dupuch, A. & Halliday, W. D. Climate-induced habitat selection predicts future evolutionary strategies of lemmings. Evol. Ecol. Res. 14, 689–705 (2012).
Kausrud, K. L. et al. Linking climate change to lemming cycles. Nature 456, 93–97 (2008).
Cunliffe, A. M., Assmann, J. J., Daskalova, G., Kerby, J. T. & Myers-Smith, I. H. Aboveground biomass corresponds strongly with drone-derived canopy height but weakly with greenness (NDVI) in a shrub tundra landscape. Environ. Res. Lett. https://doi.org/10.1088/1748-9326/aba470 (2020).
Myllymäki, A., Paasikallio, A., Pankakoski, E. & Kanervo, V. Removal experiments on small quadrats as a means of rapid assessment of the abundance of small mammals. Ann. Zool. Fenn. 8, 177–185 (1971).
Inglada, J. & Christophe, E. The Orfeo Toolbox remote sensing image processing software. In 2009 IEEE International Geoscience and Remote Sensing Symposium vol. 4 IV–733 (IEEE, 2009).
Leutner, B., Horning, N., Schwalb-Willmann, J. & Hijmans, R. J. RStoolbox: Tools for remote sensing data analysis. R Package Version 026 7, 1991–2007 (2019).
Conrad, O. et al. System for automated geoscientific analyses (SAGA) v. 2.1.4. Geosci. Model Dev. 8, 1991–2007 (2015).
Breiman, L. Random forests. Mach. Learn. 45, 5–32 (2001).
Hussain, M., Chen, D., Cheng, A., Wei, H. & Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 80, 91–106 (2013).
Tewkesbury, A. P., Comber, A. J., Tate, N. J., Lamb, A. & Fisher, P. F. A critical synthesis of remotely sensed optical image change detection techniques. Remote Sens. Environ. 160, 1–14 (2015).
Hijmans, R. J. et al. raster: Geographic Data Analysis and Modeling. (2020).
Pebesma, E. & Graeler, B. gstat: Spatial and Spatio-Temporal Geostatistical Modelling, Prediction and Simulation. (2020).
Fortin, M.-J. & Dale, M. R. T. Spatial Autocorrelation. In The SAGE Handbook of Spatial Analysis 88–103 (SAGE Publications, Ltd, 2009). https://doi.org/10.4135/9780857020130.n6.
R Core Team. R: A Language and Environment for Statistical Computing. (R Foundation for Statistical Computing, 2020).
QGIS Development Team. QGIS Geographic Information System. Open Source Geospatial Foundation Project. (2020). http://qgis.osgeo.org. Accessed 12 Sept 2020
Acknowledgements
The research has been supported by the Carl Tryggers Stiftelse för Vetenskaplig Forskning [Tryggers Stiftelse (CTS 16: 342)] and the Swedish Scientific Research Council (2017-04515).
Funding
Open access funding provided by Umea University.
Author information
Authors and Affiliations
Contributions
M.B.S. and J.O. contributed equally to this work.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Siewert, M.B., Olofsson, J. UAV reveals substantial but heterogeneous effects of herbivores on Arctic vegetation. Sci Rep 11, 19468 (2021). https://doi.org/10.1038/s41598-021-98497-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-021-98497-5
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
