
Abstract
A relativistic particle undergoing successive boosts which are non collinear will experience a rotation of its coordinate axes with respect to the boosted frame. This rotation of coordinate axes is caused by a relativistic phenomenon called Thomas Rotation. We assess the importance of Thomas rotation in the calculation of physical quantities like electromagnetic fields in the relativistic regime. We calculate the electromagnetic field tensor for general three dimensional successive boosts in the particle’s rest frame as well as the laboratory frame. We then compare the electromagnetic field tensors obtained by a direct boost \(\overrightarrow{\beta }+\delta \overrightarrow{\beta }\) and successive boosts \(\overrightarrow{\beta }\) and \(\Delta \overrightarrow{\beta }\) and check their consistency with Thomas rotation. This framework might be important to situations such as the calculation of frequency shifts for relativistic spin-1/2 particles undergoing Larmor precession in electromagnetic fields with small field non-uniformities.
Similar content being viewed by others

Introduction
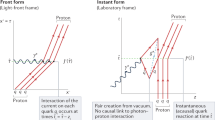
As pointed out by Thomas1, two successive non collinear Lorentz boosts are not equal to a direct boost but to a direct boost followed by a rotation of the coordinate axes. That is,
where \(\left(\overrightarrow{\beta }+\delta \overrightarrow{\beta }\right)\) is the direct boost, \(\overrightarrow{\beta }\) and \(\delta \overrightarrow{\beta }\) are two successive boosts in the lab frame, \(\Delta \overrightarrow{\beta }\) and \(\Delta \overrightarrow{\Omega }\) (not shown) are, respectively, the successive boost and the angle of rotation with respect to the frame with boost \(\overrightarrow{\beta }\) (Fig. 1). \(A(\overrightarrow{\beta }+\delta \overrightarrow{\beta })\), \(A(\overrightarrow{\beta }+\delta \overrightarrow{\beta })\), \(A(\overrightarrow{\beta }),\,A(\delta \overrightarrow{\beta })\) and \(A(\Delta \overrightarrow{\beta })\) are the usual boost matrices for the direct boost and the successive boosts respectively, and \({R}_{{\rm{tom}}}\left(\Delta \overrightarrow{\Omega }\right)\) is the rotation matrix2,3.

Schematic of the boosts. \(\overrightarrow{\beta }+\delta \overrightarrow{\beta }\): Direct boost, \(\overrightarrow{\beta }\): First successive boost, \(\delta \overrightarrow{\beta }\): Second successive boost in lab frame, \(\Delta \overrightarrow{\beta }\): Second successive boost with respect to the inertial frame with boost \(\overrightarrow{\beta }\).
This rotation of the space coordinates under the application of successive Lorentz boosts is called Thomas rotation. This phenomenon occurs when a relativistic particle is undergoing accelerated motion. Now since we have to show the acceleration, we added an infinitesimal boost vector \(\delta \overrightarrow{\beta }\) to the original boost \(\overrightarrow{\beta }\).
In general, for boosts \({\overrightarrow{\beta }}_{1}\) and \({\overrightarrow{\beta }}_{2}\) which are parallel to each other or more specifically boosts corresponding to (1 + 1)-dimensional pure Lorentz transformations, the transformation matrix forms a group which satisfies the equation:
where β12 is the velocity composition of two boosts which is given by the equation:
But successive boosts which are non collinear, in general, result in Thomas rotation of the space coordinates or in other words, the boosted frames which are accelerating in the sense that their direction is changing will experience Thomas rotation. So the values of the physical quantities obtained by applying just Lorentz transformation are not correct in such cases.
This work is inspired by the ideas discussed in4,5,6,7,8,9,10,11 but in a slightly different manner. Ungar et al. defined three inertial reference frames Σ, \({\Sigma }^{{\prime} }\), and Σ″ in such a way that their corresponding axes are parallel to each other (Σ being the lab frame). It is assumed that the relative velocity of \({\Sigma }^{{\prime} }\) with respect to Σ and the relative velocity of Σ″ with respect to \({\Sigma }^{{\prime} }\) is known beforehand. The relativistic velocity composition law can then be used to calculate the velocity of Σ″ with respect to Σ. Usually the velocity of Σ″ with respect to \({\Sigma }^{{\prime} }\) is not known so the above mentioned approach cannot be used directly. To circumvent this issue, in this paper we present a calculation in which we calculated a matrix AT3 from \(A\left(\overrightarrow{\beta }+\delta \overrightarrow{\beta }\right)\) and \(A\left(-\overrightarrow{\beta }\right)\) which contains all the information about relativistic composition of velocities and Thomas rotation.
To our knowledge, the case of non-collinear boosts and its effects on the electromagnetic field tensor has not been discussed in the literature. The aim of this paper is to see how the electromagnetic field tensor transforms with the Lorentz transformations for general three-dimensional boosts and to show that the field tensor in the direct boosted frame \(A\left(\overrightarrow{\beta }+\delta \overrightarrow{\beta }\right)\) and successive boosted frames \(A(\overrightarrow{\beta })\) and \(A\left(\delta \overrightarrow{\beta }\right)\) are consistent with Thomas rotation.
Survey of some concepts of the Special Theory of Relativity
Lorentz transformations
For two inertial reference frames Σ and \({\Sigma }^{{\prime} }\) which have a relative velocity of \(\overrightarrow{v}\) in such a way that the coordinate axes of Σ are parallel to \({\Sigma }^{{\prime} }\) and \({\Sigma }^{{\prime} }\) is moving in the positive x direction as seen from Σ, the position 4-vector of \({\Sigma }^{{\prime} }\) is related to the position 4-vector of Σ by the standard Lorentz transformation equations12:
where
The generalization of Eq. (4) for the relative velocity of \({\Sigma }^{{\prime} }\) in an arbitrary direction but with the coordinate axes of the two frames still parallel to each other is given by:
Addition of velocities
Consider two inertial reference frames Σ and \({\Sigma }^{{\prime} }\) such that the relative velocity of \({\Sigma }^{{\prime} }\) with respect to Σ is \(\overrightarrow{v}\). A particle is moving in \({\Sigma }^{{\prime} }\) such that its velocity with respect to \({\Sigma }^{{\prime} }\) is \({\overrightarrow{u}}^{{\prime} }\). The velocity of the particle with respect to Σ is then given by13:
where u∥ and \({\overrightarrow{u}}_{\perp }\) refer to the components of velocity parallel and perpendicular, respectively, to \(\overrightarrow{v}\).
It can be shown that the Lorentz factor of \(\overrightarrow{v}\), \(\overrightarrow{u}\), and \({\overrightarrow{u}}^{{\prime} }\) are related to each other by
More generally, the velocity composition law for two arbitrary velocities can be written as4,5,6,7,8,9,10,13:
with
where symbol ⊕ refers to the direct sum of the vector space of the velocity vectors.
Matrix representation and boost matrix
For the rest of the paper, we will be using matrix methods to calculate Lorentz transformations as they are very convenient to use and are more explicit. All of the equations in Eqs. (4) and (5) can easily be obtained by using the boost matrices for Lorentz transformations. For example, for a boost along the x axis, the boost matrix can be written as3:
Hence,
For an arbitrary boost, the general form of the boost matrix A takes a form in which the matrix elements can be written as:
where δij is the kronecker delta. The general form of Eq. (9) can therefore be written as2:
Set-up
To start with, consider two arbitrary boosts \(\overrightarrow{\beta }\) and \(\delta \overrightarrow{\beta }\) in three dimensions:
In order to calculate the boost matrix for various boosts, we will apply a passive transformation which will rotate our lab frame (xy) coordinate axes in such a way that its x-axis is aligned with \(\overrightarrow{\beta }\). This rotated frame will hereafter be called the longitudinal-transverse (ℓt) frame.
This whole transformation can be imagined as a product of two rotations: The first rotation is about the z axis by an angle ϕ which will align the x axis along the projection of the boost vector in the xy plane (Fig. 2). The rotation matrix associated with this rotation can be written as:
The second rotation is about the y1 axis (Fig. 3) by an angle \(\frac{\pi }{2}-\theta \). The effect of this rotation is that it aligns the x1 axis to the boost vector \(\overrightarrow{\beta }\). For the second rotation, the rotation matrix can be written as:
The overall effect of the two rotations can be combined in a single transformation matrix R:
It is clear from Fig. 4 that if:
then
where the parameters λ1 and η1 are defined in the Supplementary Information (Section 1).

Rotation about z axis by an angle ϕ. The new x, y and z axes are called the x1, y1 and z1 axes respectively.

Second rotation about the y1 axis by an angle \(\frac{\pi }{2}-\theta \). x, y, and z axes in this new frame are called the x2, y2 and z2 axes respectively.

General boost in three-dimensions. Dotted line represents the projection of \(\overrightarrow{\beta }\) on the xy-plane.
Using Eq. (17), the matrix R can be written as:
As mentioned earlier, this rotation matrix will transform the lab frame coordinates of any 4-vector (xy-frame) to its coordinates in the rotating frame also called longitudinal-transverse frame (ℓt-frame):
where the superscripts ℓt and xy refer to the components in longitudinal-transverse frame and laboratory frame, respectively, and for the sake of simplicity in notation we assumed:
Similarly, the infinitesimal boost in the longitudinal-transverse frame is of the form:
where λ1, λ2, λ5, λ6 and η1 are defined in the Supplementary Information (Section 1).
To calculate the \({\gamma }_{(\overrightarrow{\beta }+\delta \overrightarrow{\beta })}\) in the ℓt-frame, we have:
Keeping the terms linear in δβ, we get
Using the above equation we calculate:
Hence, \({\gamma }_{(\overrightarrow{\beta }+\delta \overrightarrow{\beta })}\) can be written as:
where \(\gamma =\frac{1}{\sqrt{1-{\lambda }_{1}^{2}}}\) is the Lorentz factor.
Using Eq. (19), the boost matrix for boost \({\overrightarrow{\beta }}^{\ell t}\) can be calculated:
Similarly, using Eqs. (19) and (20), to the first order in δβ, the boost matrix for the direct boost \(\overrightarrow{\beta }+\delta \overrightarrow{\beta }\) in the ℓt-frame can be written as:
Transformations of the Electromagnetic Field Tensor
The main idea of this paper is to see how the electromagnetic fields transform relativistically when there is an accelerated motion. It can be further divided into transformations in the longitudinal-transverse and lab frame.
Longitudinal-transverse ℓt-frame
To see the effects on electromagnetic fields, we first need to bring the electromagnetic field tensor to the rotating ℓt-frame so that all the boosts and electromagnetic fields are in the same frame to start with. The electromagnetic field tensor Fμν in the lab frame is given by14:
For the rest of the paper we will write Fμν = F.
To get the field tensor in the ℓt-frame, we can apply the rotation matrix R on Fμν:
where the superscript T refers to matrix transpose. After plugging in the values of R and F from Eqs. (18) and (23), we can write Fℓt as:
where
To the electromagnetic field tensor obtained in Eq. (24), we will apply boost matrix for the first successive boost \({\overrightarrow{\beta }}^{\ell t}\) and the direct boost \({\left(\overrightarrow{\beta }+\delta \overrightarrow{\beta }\right)}^{\ell t}\) using the well-known equation15:
where \({F}^{{\prime} }\) and F are the electromagnetic field tensors in the boosted frame and the lab frame (or any inertial frame) respectively and A is the boost matrix.
For boost \({\overrightarrow{\beta }}^{\ell t}\), the transformation of \({F}^{\ell t}\) can be calculated using Eqs. (21), (24) and (25):
The following table has the elements of \({({F}^{{\rm{{\prime} }}})}^{\ell t}\) after matrix multiplication: Electromagnetic fields in Table 1 are consistent with the standard field transformation equations7,15.
Similarly, for the direct boost \({(\overrightarrow{\beta }+\delta \overrightarrow{\beta })}^{\ell t}\), the electromagnetic field tensor transformation is given by:
After simplification and keeping terms to linear order in δβ, (F″)ℓt can be calculated and the detailed expressions of its elements are provided in the Supplementary Information (Section 2.1).
Because of the way we set up the problem, the electromagnetic field tensor described by the direct boost \({(\overrightarrow{\beta }+\delta \overrightarrow{\beta })}^{\ell t}\) already consists of rotations. To get the electromagnetic fields which do not have any rotations (pure Lorentz boost)3, we will use the successive boosts. As mentioned earlier in the Introduction, we will calculate a matrix AT:
For the ℓt-frame, AT looks like:
The matrix AT contains all the information regarding relativistic composition of velocities and Thomas rotation which can be seen if we write AT as3:
where: \(\Delta {\overrightarrow{\beta }}^{\ell t}\) = successive boost with respect to frame with boost \(\overrightarrow{\beta }\); \(\Delta {\overrightarrow{\Omega }}^{\ell t}=\left[\left(\frac{\gamma -1}{{\beta }^{2}}\right){\overrightarrow{\beta }}^{\ell t}\times \delta {\overrightarrow{\beta }}^{\ell t}\right]\) is the angle of rotation associated with Thomas rotation.
It can be easily shown that if the boosts and rotations are infinitesimal then:
Matrices \(\overrightarrow{K}\) and \(\overrightarrow{S}\) are the generators of Lorentz boosts and rotations respectively:
Extracting the matrix form of \(A(\Delta \overrightarrow{\beta }{)}^{\ell t}\) and \({R}_{{\rm{t}}{\rm{o}}{\rm{m}}}(\Delta \overrightarrow{\Omega }{)}^{\ell t}\) from AT, we get:
In order to find the electromagnetic fields due to pure Lorentz boosts, we calculate the electromagnetic field tensor due to the successive boosts \({\overrightarrow{\beta }}^{\ell t}\) and \(\Delta {\overrightarrow{\beta }}^{\ell t}\):
After simplification and keeping the terms which are linear in δβ, we get the matrix \({({F}^{\prime\prime\prime })}^{\ell t}\) whose elements are provided in the Supplementary Information (Section 2.2).
It should be noted that since \({({F}^{\prime\prime\prime })}^{\ell t}\) and (F″)ℓt are different from each other by just a rotation, so \({({F}^{\prime\prime\prime })}^{\ell t}\) can be obtained by operating an inverse Thomas rotation on (F″ )ℓt. In fact, we used this as a check for verifying if the expressions of electromagnetic fields calculated using Eq. (32) are correct.
Laboratory xy-frame
After getting the expressions of electromagnetic fields in the ℓt-frame obtained by different boosts, we now calculate the electromagnetic fields by the same boosts with respect to the lab frame. The overall approach stays the same but all the boost matrices are needed to be transformed in the xy-frame before being used to calculate the electromagnetic field tensor. Another way of calculating the electromagnetic field tensor is to directly transform the field tensors obtained in ℓt-frame.
In order to calculate the electromagnetic field tensor for various boosts in the lab xy-frame, we will just use the field tensor F as defined in Eq. (23). Since R is the rotation matrix for passive coordinate transformations (18), we have:
therefore we can write the electromagnetic tensors and boost matrices in the lab xy-frame as:
After matrix multiplication, \(A{\left(\overrightarrow{\beta }\right)}^{xy}\) can be written as:
which is in agreement with Eq. (12) if we substitute in
Using Eqs. (25) and (34) we can calculate the electromagnetic field tensor \({({F}^{{\prime} })}^{xy}\) which corresponds to the boost \({\overrightarrow{\beta }}^{xy}\):
Again, the components of the electromagnetic field tensor in Table 2 can be verified from the standard field transformations as shown in Eq. (26).
Similarly, for the direct boost \({(\overrightarrow{\beta }+\delta \overrightarrow{\beta })}^{xy}\), we can use Eq. (34) to calculate the boost matrix. The detailed expression of \(A{(\overrightarrow{\beta }+\delta \overrightarrow{\beta })}^{xy}\) is too long to write here but it shares the same features as3 which can be seen if we let δβz = βy = βz = 0:
The above matrix is identical in form to the one shown in3. After calculating the boost matrix Eq. (36), we can again use Eq. (25) to calculate the electromagnetic field tensor in the direct boosted frame with respect to the laboratory frame whose detailed expressions are provided in the Supplementary Information (Section 3.1).
In order to calculate electromagnetic fields in the inertial frames which are boosted upon by pure Lorentz boosts (no rotation), we use successive boosts \(\overrightarrow{\beta }\) and \(\Delta \overrightarrow{\beta }\). For that we have to calculate the expression of \({A}_{T}^{xy}\) first as done in Eq. (27) which is:
As we know from Eq. (29), \(A{(\Delta \overrightarrow{\beta })}^{xy}\) and \({R}_{{\rm{tom}}}{(\Delta \overrightarrow{\Omega })}^{xy}\) can be extracted from \({A}_{T}^{xy}\) which can be written as:
where λi, (i = 1, 2, … , 8) and η1 are defined in the Supplementary Information (Section 1).
Using Eq. (38) we can now calculate electromagnetic fields due to pure Lorentz boosts whose detailed expressions are provided in the Supplementary Information (Section 3.2).
Validation of Results
All the framework that we have constructed can be verified by two ways:
- 1.
Verifying the form of boost matrices and electromagnetic field tensor for some special cases as discussed here3,13.
- 2.
Applying this whole formalism on a 4-vector like position.
For the first approach, in order to see the identical nature of results we will assume the special case of βy = βz = δβz = 0. Applying this assumption on Eqs. (21) and (22) will give us:
Similarly, \({A}_{T}^{\ell t}\) can be reduced to a familiar result3:
In the lab xy-frame, we get the exact same results as Eqs. (40) and (41) for the above mentioned special case. This makes perfect sense since letting βy = βz = δβz = 0 would just make the original passive coordinate transformations redundant and both the ℓt- and xy- frames will be identical.
To see if the matrix for Thomas rotation \({R}_{{\rm{tom}}}(\Delta \overrightarrow{\Omega })\) is correct we can directly calculate it from its definition:
where
The Thomas rotation matrix calculated from the Eq. (42) using the corresponding representations of the boost vectors in ℓt/xy -frames matches with Eqs. (30) and (38).
For the verification of Electromagnetic Field Tensors, we can calculate them in different ways. As an example, we calculated \({({F}^{\prime\prime\prime })}^{xy}\) using:
All three equations yielded same results. Similar verification also holds for other electromagnetic field tensors involved.
Our second approach for verification is based on Ungar et al.4,12,15 in which we apply direct boost \((\overrightarrow{\beta }+\delta \overrightarrow{\beta })\) and successive boosts \(\overrightarrow{\beta }\) and \(\Delta \overrightarrow{\beta }\) to a position 4-vector. We can check if the results are consistent and share the same overall features as the electromagnetic field tensor. To see that we start with a general position 4-vector in the lab frame and for simplicity, we ignore the time component in the position 4-vector:
Transforming it in the ℓt- frame using the rotation matrix R Eq. (18), we get:
We can calculate the expression of (r)ℓt transformed by the first successive boost \({\overrightarrow{\beta }}^{\ell t}\) using Eq. (21) in the same way we calculated the electromagnetic field tensor Fμν:
which is nothing but the standard Lorentz transformation of coordinates. Similarly, for the direct boost \({(\overrightarrow{\beta }+\delta \overrightarrow{\beta })}^{\ell t}\) and successive boosts \({\overrightarrow{\beta }}^{\ell t}\) and \(\Delta {\overrightarrow{\beta }}^{\ell t}\), after letting βz = δβz = 0 for simplicity, we have:
One way to check if Eqs. (45) and (46) are correct is to show that the invariant interval ds216:
remains the same, where gμν is the metric tensor:
In our case we are concerned with the invariance of
To see if that is the case, we can apply Eq. (48) to \({({r}^{{\prime} })}^{\ell t}\), (r″)ℓt and \({({r}^{\prime\prime\prime })}^{\ell t}\) calculated above. The invariant
indeed stays the same for each case. This makes sense since we ignored the time component.
Similar results can be obtained for the position 4-vector r in the lab xy -frame and it can be easily proved that the invariant does not change. We also compare our approach with Ungar’s in the Supplementary Information (Section 4).
Conclusion
The work presented in this paper is another confirmation of the fact that two successive boosts are not equal to a single direct boost. In the case of the electromagnetic field, just applying the usual electromagnetic field transformation equations will not result in the correct form of electromagnetic fields in the case of non-collinear boosts (accelerating frames) as Thomas rotation must be included.
Apart from the validations made in the previous section we will see if the electromagnetic field tensors in the direct boosted frame \(\overrightarrow{\beta }+\delta \overrightarrow{\beta }\) and the successively boosted frames \(\overrightarrow{\beta }\) and \(\Delta \overrightarrow{\beta }\) are consistent with the Thomas rotation. To see that we can take the difference between the corresponding elements of F″ and F‴ in both the longitudinal-transverse ℓt and lab xy-frames.
After taking the difference of the electromagnetic field tensors F″ and F‴ we found that
for both ℓt- and xy-frames. This makes sense because both F″ and F‴ just differ by Thomas rotation. Although taking the difference of F″ and F‴ is not very significant physically it does show what we expected.
To our knowledge, this is the first time that someone has calculated the expressions of the electromagnetic fields in the frames corresponding to general three-dimensional non-collinear boosts.
One application of this work concerns the calculation of shifts in the Larmor frequency of highly relativistic particles moving through non-uniform magnetic and electric fields. Such a formalism was developed for the motion of non-relativistic particles17,18,19; however, this formalism is not directly applicable to relativistic particles because the formalism assumes the electromagnetic fields are known in the particle rest frame. For a highly relativistic particle undergoing acceleration (e.g., relativistic charged particles stored by electromagnetic fields within a circular storage ring), one can then apply the formalism developed here in this paper to determine the electromagnetic fields in an appropriate reference frame, where any residual motion of the particle is then non-relativistic, and then proceed to calculate the frequency shifts per the formalism of17,18,19.
References
Thomas, L. H. The Motion of the Spinning Electron. Nature 117, 514 (1926); Phil. Mag. 3, 1 (1927).
Jackson, J. D. Classical Electrodynamics, 546–548 (John Wiley & Sons, Inc., 1999).
Jackson, J. D. Classical Electrodynamics, 550–552 (John Wiley & Sons, Inc., 1999).
Ungar, A. A. Thomas rotation and the parametrization of the Lorentz transformation group. Found. Phys. Lett. 1, 57–89, https://doi.org/10.1007/BF00661317 (1988).
Ungar, A. A. The relativistic velocity composition paradox and the Thomas rotation. Found. Phys. 19, 1385–1396, https://doi.org/10.1007/BF00732759 (1989).
Ungar, A. A. The Relativistic Noncommutative Nonassociative Group of Velocities and the Thomas Rotation. Results. Math. 16, 168–179, https://doi.org/10.1007/BF03322653 (1989).
Ungar, A. A. Successive Lorentz transformations of the electromagnetic field. Found. Phys. 21, 569–589, https://doi.org/10.1007/BF00733259 (1991).
Ungar, A. A. Thomas precession and its associated grouplike structure. Am. J. Phys. 59, 824, https://doi.org/10.1119/1.16730 (1991).
Ungar, A. A. Axiomatic approach to the nonassociative group of relativistic velocities. Found. Phys. Lett. 2, 199–203, https://doi.org/10.1007/BF00696113 (1989).
Ungar, A. A. Thomas precession: Its underlying gyrogroup axioms and their use in hyperbolic geometry and relativistic physics. Found. Phys. 27, 881–951, https://doi.org/10.1007/BF02550347 (1997).
Ungar, A. A. The Relativistic Composite-Velocity Reciprocity Principle. Found. Phys. 30, 331–342, https://doi.org/10.1023/A:1003653302643 (2000).
Jackson, J. D. Classical Electrodynamics, 524–527 (John Wiley & Sons, Inc., 1999).
Jackson, J. D. Classical Electrodynamics, 530–532 (John Wiley & Sons, Inc., 1999).
Jackson, J. D. Classical Electrodynamics, 556–557 (John Wiley & Sons, Inc., 1999).
Jackson, J. D. Classical Electrodynamics, 558–559 (John Wiley & Sons, Inc., 1999).
Jackson, J. D. Classical Electrodynamics, 539–540 (John Wiley & Sons, Inc., 1999).
Lamoreaux, S. K. & Golub, R. Detailed discussion of a linear electric field frequency shift induced in confined gases by a magnetic field gradient: Implications for neutron electric-dipole-moment experiments. Phys. Rev. A 71, 032104 (2005).
Barabanov, A. L., Golub, R. & Lamoreaux, S. K. Electric dipole moment searches: Effect of linear electric field frequency shifts induced in confined gases. Phys. Rev. A 74, 052115 (2006).
Pignol, G., Guigue, M., Petukhov, A. & Golub, R. Frequency shifts and relaxation rates for spin-1/2 particles moving in electromagnetic fields. Phys. Rev. A 92, 053407 (2015).
Acknowledgements
This material is based upon work supported by the U.S. Department of Energy, Office of Science, Office of Nuclear Physics, under Award Number DE-SC0014622.
Author information
Authors and Affiliations
Contributions
All the contributing authors L.M., R.G., E.K., N.N. and B.P. contributed equally to this article. In particular, L.M. wrote the main manuscript text and L.M., R.G., E.K., N.N. and B.P. contributed in the analysis of work.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Malhotra, L., Golub, R., Kraegeloh, E. et al. Effect of Thomas Rotation on the Lorentz Transformation of Electromagnetic fields. Sci Rep 10, 5522 (2020). https://doi.org/10.1038/s41598-020-62082-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-020-62082-z
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
