
Abstract
We present a statistical analysis of nearshore waves observed during two major North–East Atlantic storms in 2015 and 2017. Surface elevations were measured with a 5-beam acoustic Doppler current profiler (ADCP) at relatively shallow waters off the west coast of Ireland. To compensate for the significant variability of both sea states in time, we consider a novel approach for analyzing the non-stationary surface-elevation series and compare the distributions of crest and wave heights observed with theoretical predictions based on the Forristall, Tayfun and Boccotti models. In particular, the latter two models have been largely applied to and validated for deep-water waves. We show here that they also describe well the characteristics of waves observed in relatively shallow waters. The largest nearshore waves observed during the two storms do not exceed the rogue thresholds as the Draupner, Andrea, Killard or El Faro rogue waves do in intermediate or deep-water depths. Nevertheless, our analysis reveals that modulational instabilities are ineffective, third-order resonances negligible and the largest waves observed here have characteristics quite similar to those displayed by rogue waves for which second order bound nonlinearities are the principal factor that enhances the linear dispersive focusing of extreme waves.
Similar content being viewed by others
Introduction
Recent studies1,2 reveal that rogue waves can arise from a combination of the process of constructive interference and nonlinear effects specific to the complex dynamics of ocean waves. Under relatively rare conditions, waves locally propagate in an organized way or nearly in phase, resulting in an unusual case of constructive interference that generates waves with large amplitudes. However, this mechanism still cannot fully explain the sizes of rogue waves observed under actual oceanic conditions. Various discrepancies observed between theoretical models and actual observations can be attributed to the nonlinear nature of waves: they are not sinusoidal but vertically asymmetric, displaying shallower more rounded troughs, and higher sharper crests that result from the water surface being pushed upward against the pull of gravity. Thus, the nonlinearity of the ocean surface manifest in the lack of symmetry between wave crests and troughs needs to be accounted for3,4,5. Such nonlinearities do contribute to the effects of constructive interference noticeably. Indeed, recent studies1,4 suggest that nonlinear effects due to second-order bound harmonics play a predominate role in this process and can cause an increase of 15 to 20 percent in crest height, i.e. the vertical distance from the mean sea level to the top of the wave.
The formation of a rogue wave at a given point of the ocean is simply a random or chance event1. Several cases of extreme wave occurrences of practical and theoretical interest such as the Andrea, Draupner and Killard waves1 and the sinking of El Faro2 have been studied in detail by way of higher order spectral wave simulations and validated with probabilistic wave models. These studies have shown that second-order statistical distributions of crests, in particular those often referred to as Tayfun3,4,6,7 and Forristall8 models, both describe rogue statistics reasonably well in intermediate to deep waters.
In this work, we will show that the Tayfun and Boccotti9,10 models for wave heights, previously validated for both simple4,10 and mixed seas11,12,13 in deep water, describe the statistics of large waves in intermediate to relatively shallow waters reasonably well also. For comparison, we also consider the Forristall’s Weibull regression model8 because of its frequent application and popularity in engineering design14. Our results here and several others elsewhere indicate that it does work quite well in describing the distribution of observed data. For example, Gibson et al.14 use the Forristall’s model to explain their statistics of oceanic wave crests, but they do not use the Tayfun3 or Tayfun-Fedele4 models on the grounds that they require the calculation of a key parameter from the time trace of water surface elevations, not readily available from hindcast models. However, they were able to use the Boccotti9 wave-height model with two parameters specifically dependent on the frequency spectrum or the time trace of surface elevations. The Forristall crest-height model likewise requires two parameters that depend on the spectral moments. Similarly, recent work by Katsardi et al.15 indicates that various regression models fitted to observed data are not universally applicable nor do they provide an adequate description of waves in shallow water, as large waves are overestimated. However, only unidirectional laboratory waves propagating on rather mild impermeable slopes are explored, and neither the Tayfun crest-height model3,4 nor the Boccotti wave-height models9,10 are tested on the grounds that second-order models cannot describe highly nonlinear shallow-water waves affected by intense wave-breaking. Nonetheless, they consider the Forristall crest-height model in their comparisons. That model is also second-order, and all second-order models break down in shallow water where waves are highly nonlinear, prone to intense breaking and affected by various dissipative effects of the seabed. Nevertheless, all these models are equally applicable to some of their data representative of the relatively shallower waters of the transitional water depths.
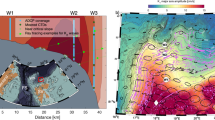
In the present study, we consider all the aforementioned models and test them against directional waves observed in relatively shallow waters within the shoaling zone. In particular, we consider two wave data sets from ADCP measurements taken off the west-coast of Ireland near Killard Point in 2015 and near the Aran Islands in 2017 (see Fig. 1). In particular, the two locations are nearshore at a water depth of approximately 37 meters (Killard) and 45 meters (Aran). They are well-known high-energy coastlines where storm waves overtop cliffs, fracture bedrock, and move large rocks weighing 100 tons or more16,17,18,19. We then analyze wave statistics in relatively shallow waters during storm events. In particular, we examine data observed in two storms, namely the storm of 25–27 Feb 2015, hereafter referred to as Feb 2015, and Doris of 21–26 Feb 2017. Wave measurements carried out during these storms are described in the Methods section. Monochromatic waves propagating on a water depth d and characterized with a wave number k feel the presence of the bottom, and start being modified whenever the dimensionless depth parameter kd < π. The wave regime is classified as deep water if kd > π, as intermediate or transitional depth for π/10 < kd < π, and as shallow water if kd < π/10. This classification has significance both practically and theoretically in establishing how wave characteristics are modified and what processes need be included and modeled in their theoretical predictions. Obviously, defining the depth regime of a wind-wave field as a whole in a similarly precise fashion is impossible due to the wide range of wave numbers observed. As a compromise, we will define the depth regime for the two storms based on the dominant wavenumber kp at the spectral peak, thus focusing our attention on the most energetic components with wave numbers at and near the spectral peak. On this basis, both storms are in the transitional water-depth regimes since 0.5 < kpd < 2.5, as seen in the right panel of Fig. (2). Further, characteristics of both storms vary considerably over their durations of 70 hours, approximately. As a consequence, we propose novel probability models appropriate to non-stationary processes so as to be able to analyze the surface-elevation time series gathered during the two storms.

(Left) Map of Ireland: ADCP location off the Aran Islands in 2017 (upper Inset) and off Killard Point in 2015 (lower Inset). (Right) ADCP deployment with (blue-capped) instruments in a protective frame. The map was generated from data via OpenStreetMap and its contributors. Photo by F. Dias.

(Left) Variations of difference between consecutive sea states of Doris and Feb 2015 storms, measured in terms of the standard deviation of observed values of σ2/σ1 − 1 between two consecutive sea states in a storm sequence. (Right) Hourly variations of the depth factor kpd and (dashed line) theoretical threshold above which plane waves are modulationally unstable in unidirectional seas30,31.
Results
This section is structured as follows. First, we discuss the characteristics of the sea states generated by the two storms as they pass by the west coast of Ireland. The descriptions of various wavefield characteristics, associated principal statistical parameters and probability models employed in the analyses are described in the Methods section. Subsequently, we present the analysis of extreme waves. In particular, in order to be able to predict rationally the occurrence of extreme waves in a time-dependent storm, we first present the theoretical formulation of a non-stationary model for describing the sequences of sea states in a storm. On this basis, an optimal sea state duration is determined based on the rationale that variation of key statistics is minimal between two consecutive sea-state sequences. We then explore the occurrence frequency of rogue waves observed at a fixed point at sea. The largest waves observed at the peak of the storms and their characteristics are then compared to those of the Draupner and Andrea rogue waves, observed at different oil platforms in the North Sea in 1995 and 2007, respectively, the Killard rogue wave observed off the coast of Ireland in 20151 and the simulated El Faro rogue wave2. The metocean parameters of the six sea states are summarized in Table 1.
Our statistical analysis of large waves focused on the study of the time sequence of changing sea states during the two storms. An optimal sea state duration Tsea of 50 minutes for both storms was determined so as to minimize the degree of difference between waves of consecutive sea states. Drawing on Boccotti9, this is measured by the standard deviation of the random variable V = σ2/σ1 − 1, where σj2 are the variances of two successive sea states in the storm sequence as shown in Fig. (2). Sampled values of V are obtained by dividing the non-stationary time series into N = Ds/Tsea successive sea states of the same duration Tsea and variances σ12,σ22, ..., σj2,σj + 12, ..., where Ds is the storm duration (70 hours). Then, N − 1 sampled values of V follow as Vj = σj + 1/σj − 1 for j = 1, ..., N − 1, from which the standard deviation of V can be estimated. Obviously, the mean of V tends to zero as Tsea approaches smaller values.
This process ensured that resulting statistics are robust to variations in Tsea up to ±20 min once the total population of surface elevations from each sea state in a storm sequence are normalized by the respective significant wave height.
Metocean parameters
Both storms generated directional sea states in transitional water depths. This is clearly seen in the right panel of Fig. (2), displaying the hourly variations of the depth coefficient kpd during the two storms. Surface spectra observed were broadbanded so that ωp ≈ 0.8ωm, while kp ≈ 0.7km.
Metocean parameters of both storms and how these vary are shown below in the top and bottom panels of Fig. (3) respectively. In particular, the left panels of Fig. (3) depict the hourly variation of the significant wave height Hs = 4σ. For comparison, the variation of actual significant height H1/3 representing the mean of the highest 1/3 of wave heights observed is also shown in the same panels. It is seen that it is about 5% smaller than Hs. The actual mean zero-up-crossing wave period T0 is also shown in the center panels of the same figure, whereas the right panels depict the wave spectra measured at the storm peaks. We observe that the high-frequency behavior in both cases is described by a logarithmic f−4 decay in conformity with Zakharov’s wave turbulence20.

History of metocean parameters in (top panels) Doris and (bottom panels) Feb 2015 storms: (left) hourly variations of significant wave height Hs = 4σ compared to actually observed H1/3, (center) variation of mean zero-up-crossing period T0, and (right) surface spectra at peak stage of storms and their high-frequency saturation compared to a logarithmic f−4 type decay.
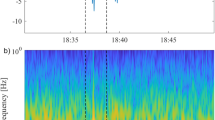
The two states analyzed here do not present any characteristics typical of mixed or crossing seas such as swell waves overlapping with wind seas because the frequency spectra S(f) displays a unimodal structure, as depicted in the right panels of Fig. (3). In particular, an examination of the directional spectrum Sd(ω, θ)/σ2 estimated using the Bayesian direct method (BDM) at the peak of Doris storm and shown in the left panel of Fig. (4) clearly displays a unimodal broad-banded wind-wave field, also confirmed by the attendant unimodal directional spreading function D(θ) in the right panel of the same figure.

Doris: (left panel) Estimated normalized directional spectrum Sd(ω,θ)/σ2 [Hz−1rad−1] at the storm peak using the Bayesian direct method (BDM) and (right panel) associated angular spreading function \(D(\theta )={\int }_{0}^{\infty }{S}_{d}(\omega ,\theta ){\rm{d}}\omega /{\sigma }^{2}\).
Figure (5) displays the scatter diagrams of crest heights h/Hs versus corresponding wave periods T/T0 for both storms. Large crest heights (and similarly wave heights, not reported here) do not violate the Miche-Stokes limits. These are depicted in the same figure by two bold red lines representing the Miche-Stokes limits for the most intense and weakest sea states of the storms. In seas generated by intense storms, nonlinear wave dispersion is effective in limiting wave growth as a precursor to breaking21,22,23. Thus, the onset of wave-breaking can occur well below the Miche-Stokes upper limit22,24,25,26,27.

Scatter diagrams of crest heights h/Hs versus wave periods T/T0 observed in Doris and Feb 2015 storms compared with Miche-Stokes limits for the weakest (upper red curves) and the most intense (lower red curves) sea states, respectively.
In Table 1 we compare the metocean parameters observed during the peak states of the two storms with those of the El Faro, Draupner, Andrea and Killard rogue sea states1. Clearly, all six sea states have similar metocean characteristics. Killard, Doris and Feb 2015 are in shallower waters and the last two have a greater steepness than the other four sea states. Indeed, the observed values of skewness λ3 and excess kurtosis λ40 are larger than those observed in the other four cases (see also Fig. (6)). This suggests that the largest waves observed were near the onset of incipient breaking or already breaking, thus lessening the likelihood of occurrence of larger rogue events21,22,28.

Histories of statistical parameters in (top panels) Doris and (bottom panels) Feb 2015 storms: (left) hourly variation of observed values of μ = λ3/36 compared to theoretical NB steepnesses3,4 μm and μp; (right) hourly variation of observed Λ and Λappr = 8λ40/3 implied by NB theory41 compared to NB estimates Λm and Λp. Note that Λ is practically the same as Λappr. Subscripts m and p refer to definitions of parameters based on the mean and dominant wavenumbers km and kp, respectively.
Modulational instability in intermediate or transitional water depths
In the Feb 2015 storm, the depth coefficient kpd, depicted in the right panel of Fig. (2), was below the critical depth threshold 1.363 whereas not so in Doris. Above the threshold, plane waves are modulationally unstable29 in the one-dimensional (1-D) wave dynamics described by the Nonlinear Schrödinger (NLS) equation30,31. However, the wave fields analyzed here are directional sea states, and according to the 2-D hyperbolic NLS equation, plane waves are modulationally unstable even at depths below that critical value, if they are perturbed by appropriate oblique disturbances29,32,33,34. Nevertheless, it is also recognized that instabilities ensuing from such disturbances are not likely to occur for values of kpd < 0.532. So, it is plausible that rogue waves could be generated by modulational instability, as in unidirectional seas35,36 during both of the storms analyzed here. The kurtosis statistics is often used as an indicator if any rogue waves are present in a sea state. In sea states where third-order nonlinearities are significant, excess kurtosis λ40 = λ40d + λ40b comprises a dynamic component37,38,39,40 λ40d due to nonlinear quasi-resonant wave-wave interactions and a Stokes bound harmonic contribution40,41 λ40b, given in the Methods section. As for the dynamic component, drawing on Janssen40, Fedele’s39 one-fold integral formulation is extended to narrowband (NB) waves in intermediate waters as
In the preceding expression, \(BFI=\sqrt{2}{k}_{p}\sigma /\nu \) defines the Benjamin-Feir index in deep water at the spectral peak, ν the spectral bandwidth, \(i=\sqrt{-1}\) and Im(x) denotes the imaginary part of x, ωp and kp the dominant spectral frequency and wavenumber. Depth effects on wave directionality, measured by R, are represented by RS = βSR by way of the factor βS, and αS is the depth factor. The latter two depend on the dimensionless depth kpd (see Methods section). In the deep-water limit, both αS and βS become 1. The maximum of dynamic excess kurtosis is well approximated by39
and
where \({R}_{0}=3\sqrt{3}/4{\pi }^{3}\) (which corrects a misprint in39) and b = 2.48.
In the focusing regime (0 < RS < 1 and αS > 0) the dynamic excess kurtosis of an initially homogeneous Gaussian wave field grows, reaches a maximum at the intrinsic time scale \({\tau }_{c}={\nu }^{2}{\omega }_{p}{t}_{c}=1/\sqrt{3{R}_{S}}\) and then monotonously decreases and eventually vanishes over longer times. Such a regime is typical of unidirectional narrowband waves on water depths kpd < 1.363. Indeed, in 1-D waves modulational instability disappears below that critical threshold and αS < 0. As a result, wave dynamics becomes of defocusing type and excess kurtosis is negative. In particular, it reaches a minimum at tc and then tends to zero over larger times. The kurtosis formulation in Eq. (1) extends Fedele’s39 stochastic approach to NB waves at intermediate water depths, and it indicates that in directional seas such as those analyzed in this study, modulation instability can also occur at depths below the critical threshold 1.363 for αS > 0 (see also Alber42). Further, for waves propagating over a broad range of directions in the open sea, Fedele et al.1 show that such instabilities are ineffective in triggering rogue waves as excess kurtosis becomes negative, provided that RS > 1. A rogue wave regime is a more likely occurrence only if the surface spectrum is sufficiently narrow-banded (RS < 1) as well as characterized by a relatively large positive excess kurtosis.
Both storms analyzed here are in transitional water depths and prone to potential rogue occurrences induced by modulational instability since αS > 0. However, all their sea states are directionally spread and characterized with mostly negative excess kurtosis since RS > 1. This can clearly be seen in Fig. (7). Thus, the potential recurrence or focusing of large waves as observed in unidirectional seas is largely attenuated or suppressed1,2,7,39. Indeed, our statistical analysis indicates that the effects of third-order resonance or modulational instabilities are negligible, and that second-order bound nonlinearities are the dominant factor in shaping the large waves observed. We also point out that the NB predictions based on the mean wavenumber km yield similar negligible estimates of the dynamic excess kurtosis.

Variations of hourly estimates in (top panel) Doris and (bottom panel) Feb 2015 storms of the maximum of dynamic excess kurtosis λ40d (thin line) and significant wave height Hs (thick line).
In summary, our analysis indicates that fourth order cumulants are essentially trivial to begin with, implying that the analyzed sea states are ordinary: nothing specially rogue about them. The present analyses of the two storm wave datasets discussed in the following section confirm all this and show that there is hardly anything beyond second-order nonlinearities to explain their statistics.
Nonlinear wave statistics
The relative importance of nonlinearities in a sea state can be assessed by way of various integral statistics. These include the observed values of the wave steepness μ = λ3/3 6 and the coefficient Λ = λ40 + 2λ22 + λ04 4, where λ3 is skewness and λij are fourth-order cumulants of the zero-mean surface elevation η(t) and its Hilbert transform. In particular, λ40 is the excess kurtosis of surface elevations. Skewness is a measure of vertical asymmetry, and it describes the effects of second-order bound nonlinearities on the geometry and statistics of the sea surface with higher sharper crests and shallower more rounded troughs3,4,6. Excess kurtosis indicates whether the tail of the distribution of surface elevations is heavier or lighter relative to a Gaussian distribution. It comprises a dynamic component λ40d measuring third-order quasi-resonant wave-wave interactions and a bound contribution λ40b induced by both second- and third-order bound nonlinearities3,4,5,6,37,43.
In describing wave statistics, the theoretical NB predictions based on the mean wavenumber km, rather than kp, tend to yield more favorable comparisons with deep-water observations or theories6,44. Definitions based on kp lead to predictions that noticeably underestimate the observed and/or theoretical statistics of broadband waves since kp < km44. Nonetheless, the sea states analyzed here are in intermediate water depths and characterized with broad-banded spectra both in frequency and direction. Describing the statistics in such cases based on either km or kp is neither very reliable nor realistic.
In Table 1 we compare the statistical parameters of the most intense sea states of Doris and Feb 2015, and also the Draupner, Andrea and Killard rogue sea states1,2. The maximum dynamic excess kurtosis is negative and negligible. Thus, third-order quasi-resonant interactions, including NLS-type modulational instabilities, should not play any significant role in the formation of large waves in comparison to bound nonlinearities1,39 especially as the wave spectrum broadens21 in agreement with oceanic observations available so far4,45,46. The values of excess kurtosis λ40 and Λ are mostly due to bound nonlinearities7,47,48.
In the top panels of Fig. (6), we compare the hourly variations of (left) the observed values of μ = λ3/3 6 versus the theoretical NB approximations3,49 μm and μp based on the mean and dominant wavenumbers km and kp, respectively, and (right) the observed fourth–order Λ coefficient, its approximation Λappr and the NB predictions37,41 Λm and Λp based on km and kp for Doris. The same comparisons are also reported in the bottom panels for Feb 2015. Clearly, the two NB predictions μm overestimate and μp slightly underestimate the observed values of μ for Doris. In contrast, both NB predictions underestimate the observed steepness for Feb 2015. Similarly, the actual Λ is mostly overestimated by both the NB estimates. Moreover, Λ is practically the same as Λappr (see Methods section). In the final analysis, the sea states analyzed here are characterized by broadband spectra both in frequency and direction and the NB assumption is unrealistic. Thus, hereafter we use the observed values of μ and Λ to evaluate wave statistics.
Occurrence frequency of extreme waves in storms
We now describe a novel approach for the statistics of extreme waves encountered by an observer at a fixed point of the ocean surface during a storm of duration Ds. Drawing on9,50,51,52, the storm is modeled as a non-stationary continuous sequence of sea states of duration dt, and dt/T0(t) is the number of waves in the sea state, where T0(t) is the time-changing mean zero-crossing wave period. Consider now a wave of the storm and define the probability Pns(ξ) that its crest height C exceeds the threshold h = ξHs as observed at a fixed location where Hs = 4σ. Equivalently, this is the probability of randomly picking a wave crest whose height C exceeds the threshold ξ = h/Hs from the non-stationary time series observed at a fixed point of the storm. Then,
where P(ξ, t) = Pr[C > ξHs(t)] stands for the probability that a wave crest height C exceeds the threshold ξHs(t) in the sea state occurring in the time interval [t, t + dt]. This probability depends on wave parameters around time t. The definition of Pns is consistent with the way wave crests are sampled from non-stationary wave measurements during storms. In particular, a storm is partitioned into a finite sequence of Ns sea states of duration Tsea = Ds/Ns. In each sea state Sj centered at t = tj, waves are sampled and their crest elevations (h) are normalized with the local significant wave height as h/Hs(tj) and put all in the same population . Then, the empirical exceedance probability Pns(ξ) is estimated as the ratio of the number of waves that exceed ξ to the total number of waves in the population. This is consistent with the way Eq. (4) is formulated. Indeed, \({N}_{w}(t,dt)=EX(t)dt=\frac{1}{{T}_{0}(t)}dt\) is the expected number of waves during a sea state in [t, t + dt] and P(ξ, t)EX(t)dt is the number of waves whose crest heights exceed the threshold h = ξHs(t) in the same sea state. Then, Pns in Eq. (4) follows by cumulating (integrating over time) the number of waves of all the sea states whose crest heights exceed h. In practice, the non-stationary Pns is estimated from data as the weighted average
where Nw(tj) is the number of waves sampled in the sea state Sj. Equation (4) also implies that the threshold ξHs is exceeded on average once every Nh(ξ) = 1/Pns(ξ) waves. Thus, Nh can be interpreted as the conditional return period of a wave whose crest height exceeds ξ. For weakly nonlinear seas, the probability P(ξ, t) is hereafter described by the third-order Tayfun-Fedele4 (TF), second-order Tayfun3 (T), Forristall8 (F) and the Rayleigh (R) distributions (see Methods section). Note that we are now able to estimate the probability Pns(ξ) that a wave of the storm has a crest height C larger than ξ = h/Hs. However, we still need to find in what sea state (of significant wave height Hs) such a wave most likely occurs.
To do so, we draw on9,51,52 and express the probability density function (pdf) describing the time at which a wave crest C exceeds a specified or given level h in the interval [t, t + dt] as
The preceding pdf is estimated from data as
where Tsea is the sea state duration. As an example, consider the Feb 2015 storm. The largest wave with also the largest crest height of h = hmax = 1.23Hs = 14 m (see Table 1) is observed in the sea state at the storm peak (Hs = 12.6m). The pdf p(t|h) estimated for that crest amplitude, and shown in Fig. 8, is very narrow and concentrated around its absolute maximum coincident with the storm peak in agreement with what is expected intuitively. Instead, waves whose crest height exceeds the smaller threshold h = hmax/2 = 7 m have a pdf that still has its maximum at the storm peak, but it is broader indicating that crest heights exceeding 7 m likely occur also before or after the storm peak.

Probability density function p(t|h) [1/min] of a wave whose crest elevation exceeds the maximum observed height h = hmax = 1.23Hs = 14 m in the Feb 2015 storm. Hourly variations (bold line) of significant wave height Hs are also shown. The vertical dashed line indicates the sea state in which the largest crest was observed. For comparison, the pdf for h = hmax/2 = 7 m is also shown.
Similarly, the nonstationary occurrence frequency of a wave of the storm whose crest-to-trough wave height exceeds the threshold H as well as the pdf p(t|H) of the sea state in which such waves occur can be both described by the same Eqs ((4), (6)) by simply replacing P(h) with the exceedance probability P(H) appropriate for wave heights of stationary seas. This is hereafter described by the generalized Boccotti (B), Tayfun (T) and linear Rayleigh (R) distributions (see Methods section).
Finally, the second-order nonstationary pdf pns(z = η/σ) of wave surface elevations η for storms is defined as
where p(z = η/σ) is the Tayfun approximation3,44 for nonlinear stationary sea states, described by
where \(F=\sqrt{1+2\mu z+{\mu }^{2}}-1\) and μ = λ3/3, valid for the observed values of skewness coefficient λ3 < 0.6, approximately.
Note that the probability structure of storm-wave characteristics depends upon the time history of wave parameters, say α(t), such as significant wave height, skewness and excess kurtosis. The analyses of the data sets here indicate that the non-stationary distributions are well approximated by the corresponding stationary models of an equivalent sea state with duration equal to that of the actual storm (as if Hs does not vary in time) evaluated using the weighted average parameters
This follows from modeling the actual storm as if it had an ‘equivalent’ rectangular shape and assuming that the average parameters of the Tayfun and Boccotti models are the same in both the actual and equivalent storms. However, such approximations do not have general validity, and they may not work for other models or data sets. Thus, hereafer we will only consider the non-stationary models based on (4).
The empirical distributions of surface wave elevations for both storms Doris and Feb 2015 are shown in Fig. (9). These are for the most part well described by the non-stationary Tayfun pdf pns, which is practically the same as the stationary approximation estimated using the weighted average steepness μ based on Eq. (10). This indicates the dominance of second-order nonlinearities in shaping the sea surface, especially for the more intense Feb 2015 storm.

Probability density function of scaled surface wave elevations η/σ in (left) Doris and (right) Feb 2015 storms. The empirical distributions (□) derived from the total wave population are compared with the non-stationary second-order Tayfun (T) distribution for storms. Dashed curves (G) describe the probability density for a standard unit Gaussian variable.
Figure (10) summarizes the wave statistics for Doris. In particular, the left panel of the figure depicts the empirical distribution for crest heights h/Hs observed in the total wave population plotted versus the number of waves Nh(ξ). This is compared against the theoretical predictions of the nonstationary second-order Tayfun (T), third-order Tayfun-Fedele (TF), Forristall (F) as well as the Rayleigh (R) distributions. Although the associated confidence bands on the empirical probabilities noticeably widen over the large waves, the theoretical predictions nonetheless still lie mostly within the same confidence bands. Note that TF is practically the same as T and F as an indication that second-order effects are dominant, whereas the linear R model underestimates the return periods. Similarly, the right panel of the same figure shows the empirical distribution for crest-to-trough wave heights H/Hs. The observed statistics is well described by both the non-stationary generalized Boccotti (B) and Tayfun (T) models. The small differences among the various models are magnified in Fig. (11), which shows the plots of the normalized crest height h/hR and wave height H/HR versus the number of waves Nh. Here, hR and HR are the crest and crest-to-trough-thresholds exceeded with probability 1/Nh in a Gaussian sea in accord with the Rayleigh law.

Doris: (left) crest heights h/Hs and (right) crest-to-trough wave heights H/Hs versus number of waves Nh(ξ). Empirical distributions (□) of total population of waves observed in comparison with non-stationary models (T = Tayfun, TF = Tayfun-Fedele, F = Forristall, B = generalized Boccotti and R = Rayleigh distributions). (Light gray lines) approximate confidence bands on observational estimates and (horizontal dashed lines) rogue thresholds58 for crest (1.25Hs) and wave heights 2.2Hs, respectively.

Doris: (top) crest heights h/hR and (bottom) crest-to-trough wave heights H/HR versus number of waves Nh(ξ). Empirical distributions (□) of total population of waves observed in comparison with non-stationary models (T = Tayfun, TF = Tayfun-Fedele, F = Forristall, B = generalized Boccotti and R = Rayleigh distributions). (Light gray lines) approximate confidence bands on observational estimates. Amplitude hR (HR) refers to Rayleigh-distributed crest (crest-to-trough) heights exceeded with probability P(ξ) in Gaussian seas.
Similar conclusions also hold for the wave statistics for the Feb 2015 storm, summarized in Figs (12) and (13). As regard to crests, TF slightly exceeds T, again as an indication that second-order effects are dominant.

Feb 2015: (left) crest heights h/Hs and (right) crest-to-trough wave heights H/Hs versus number of waves Nh(ξ). Empirical distributions (□) of total population of waves observed in comparison with non-stationary models (T = Tayfun, TF = Tayfun-Fedele, F = Forristall, B = generalized Boccotti and R = Rayleigh distributions). (Light gray lines) approximate confidence bands on observational estimates and (horizontal dashed lines) rogue thresholds58 for crest (1.25Hs) and wave heights 2.2Hs, respectively.

Feb 2015: (top) crest heights h/hR and (bottom) crest-to-trough wave heights H/HR versus number of waves Nh(ξ). Empirical distributions (□) of total population of waves observed in comparison with non-stationary models (T = Tayfun, TF = Tayfun-Fedele, F = Forristall, B = generalized Boccotti and R = Rayleigh distributions). (Light gray lines) approximate confidence bands on observational estimates. Amplitude hR (HR) refers to Rayleigh-distributed crest (crest-to-trough) heights exceeded with probability P(ξ) in Gaussian seas.
The wave profiles η with the largest wave crest height observed during Doris and Feb 2015 are shown in the left panel of Fig. (14). In the other panels, we display the El Faro, Draupner, Andrea and Killard rogue wave profiles for comparison1,2. In the same figure, the mean sea level (MSL) below the crests is also shown. The estimation of the MSL follows by low-pass filtering the time series of zero-mean surface elevations with a frequency cutoff \({f}_{c} \sim {f}_{p}/2\), where fp is the frequency at the spectral peak53.

Observed wave profiles η/ηmax (thick solid) and mean sea levels (MSL) (thick dashed) versus t/Tp for (first panel from the left) Doris and Feb 2015, and (following panels from left to right) El Faro, Andrea, Draupner and Killard simulated waves (thin solid) and MSL (thick dashed). Actual measurements (thick solid) and MSLs (thick solid) are also shown for Andrea, Draupner and Killard. Note that the Killard MSL is insignificant and the Andrea MSL is not available. ηmax is the maximum crest height and Tp is the dominant wave period (see Table 1 and Methods section for definitions).
All six wave profiles are similar, suggesting a common generation mechanism for rogue events. In particular, all cases have sharper crests and rounded troughs and they do not display any secondary maxima or minima. They appear more regular and behave as narrow-banded waves do45. In essence, this means that the temporal profile of a relatively large wave observed over a complete phase cycle of 2π displays a single dominant crest or a ‘global’ maximum with no local maxima or minima. In other words, the wave phase monotonously increases over the cycle without any reversals associated with local minima and maxima45. These characteristics typical of truly narrow-band waves in every wave cycle are similarly observed but locally in the largest group of waves in a wind-wave field although they are not in the least described by a narrow-banded spectrum. In narrow-band waves, the constructive interference is the primary mechanism for the generation of large displacements in the underlying first-order linear field. The second-order corrections are phase-locked to the linear field such that they always tend to enhance wave crests and flatten the troughs, leading to the basic vertical asymmetry observed in oceanic waves. The process is similar for relatively large waves in a wind-wave field45.
Further, Doris and Feb2015 both display the characteristics of a dominant wind wave field and show no evident characteristics typical of mixed or crossing seas such as swell overlapping with local wind waves (see e.g. Fig. 4). That may explain the minor set-down observed below the largest waves observed. On the contrary, a set-up below the simulated El Faro and actual Draupner rogue waves is observed, most likely due to the multidirectionality of the respective sea states2. Indeed, recent studies showed that Draupner occurred in mixed seas consisting of swell waves propagating at approximately 80 degrees to wind seas54,55,56. Instead, the El Faro sea state showed a very broad directional spreading of energy typical of strong hurricane conditions. The multi-directionality of the two sea states may explain the set-up observed under the large wave53 instead of the second-order set-down normally expected57.
Discussion
There is at present no consistent crest-height or wave-height model that works effectively at shallow water depths where kd < π/10 and recent comparisons15 simply serve to demonstrate this. The wave regime in such shallow waters can only be described by stochastic formulations of highly nonlinear shallow-water equations. Second-order theories or approximations tend to become ineffective at such depths. Our work does not overlap with or extend to such water depths where the second-order theory breaks down. Indeed, we have shown that the theoretical Tayfun3,6 and Boccotti9,10 models for crest and wave heights, largely applied to and validated for deep-water waves4,10 and more recently for mixed/crossing seas11,12,13, describe waves reasonably well in intermediate shallow waters also (π/10 < kd < π). So does the second order Forristall model8.
In particular, we have analyzed actual wave data from ADCP measurements gathered during the passages of two major storms nearshore off Killard Point at the intermediate water depth of approximately 37 m (kpd = 0.6–2.5) in 2015 and off the Aran Islands at 45 m depth (kpd = 1.36–2.2) in 2017 (see Fig. 1). The observed sea states at the storm peak present the characteristics of a main dominant wind wave field. No evident crossing sea characteristics of overlapping swell and wind components are observed. We have observed time-dependent wave statistics and proposed a novel approach to rationally analyze the non-stationary surface series.
The large wave characteristics measured do not exceed the conventional rogue thresholds58 h/Hs = 1.25 and H/Hs = 2.2 observed in laboratory experiments15. In contrast, Draupner, Andrea or Killard rogue waves1,2, all observed in intermediate water depths, did attain crest heights of approximately 1.6Hs (see Table 1). Nevertheless, our analysis reveals that the largest waves observed here have characteristics quite similar to those displayed by the El Faro, Andrea, Draupner and Killard rogue waves1,2 for which second order bound nonlinearities constitute the dominant factor enhancing the linear dispersive focusing of extreme waves.
Moreover, most observed values of the dimensionless depth kpd were slightly above (Doris) and below (Feb 2015) the threshold 1.363 above which unidirectional waves are expected to become modulationally unstable30,31. The sea states analyzed here were multidirectional, and a carrier wave is modulationally unstable even at depths below that critical value if they are perturbed by appropriate oblique disturbances32,33,34. This type of instabilities are not very likely to appear in theory32 if kpd < 0.5. Nonetheless, rogue waves can be generated by modulational instability, as in unidirectional seas35,36. However, in directional seas such as the two considered here, energy can spread directionally and the recurrence of large waves as observed in unidirectional seas is largely attenuated or suppressed1,2. Indeed, our statistical analysis indicates that modulational instabilities are ineffective, third-order resonant effects are negligible and second order bound nonlinearities are the dominant factor in shaping the large waves observed.
Our results here also indicate that in shallower water depths, nonlinear dispersion effects intensify2,21, inducing waves to break more rapidly than in deep waters. As a result, waves cannot breathe as they do not have time to grow and reach higher amplitudes above 1.25Hs as in deep water. Therefore, whereas the standard rogue thresholds are based on the Rayleigh law appropriate to linear non-breaking Gaussian seas, it makes sense to consider more realistic thresholds and models that account for wave breaking since the latter limits wave growth and impedes the occurrence of rogue waves2,21,22.
Finally, large waves with higher and sharper crests do not display any secondary maxima or minima. They appear more regular or “narrow banded” than relatively low waves, and their heights and crests do not often violate the Miche–Stokes type upper limits59. Our results also suggest that third-order resonant nonlinearities do not affect the surface statistics in any discernable way, in agremeent with recent rogue wave studies1,2. Indeed, our analysis reveals that fourth order cumulants are negligible. As a consequence, the sea states analyzed here have nothing specially rogue about them.
Methods
ADCP measurements
A Teledyne Sentinel V acoustic Doppler current profiler (ADCP) was deployed off Killard Point, Ireland (upper inset of Fig. 1) during Spring 2015 and off the Aran Islands, Ireland (lower inset of Fig. 1) during Spring 2017, to measure wave events. The instrument itself was secured in a frame to ensure it stayed in position and to prevent damage (see right panel of Fig. 1). The frame and instrument were placed at rest at the sea bottom, at an average depth of 37 m (Killard Point) and 45 m (Aran Islands). The four slant beams made a 25° angle with the vertical, so that at the surface, the maximum distance between beams was approximately 35 m (Killard Point) and 42 m (Aran). This ADCP operates by emitted sound pulses in five beams (four slanted and one vertical) and using the Doppler effect to measure the movement of sound scatterers such as plankton and small particulates, within these beams60. Each beam divides the water column into 38 bins, separated by 122 cm. Because of hardware limitations, data were sampled at 2 Hz similarly to standard wave measurements gathered at oil platforms14. Drawing on61, the sampling error on estimating crest and wave heights, the so-called quantization error62,63, is approximately 1–2%. This is mitigated by correcting for crest amplitudes by quadratically interpolating the sampled crests, as in recent stereo-measurements of the ocean surface62,63.
We correct the resulting data sets of echo intensity and velocity measurements for pitch, roll, and heading of the instrument in the water, and convert from instrument coordinates (a radial set) to geographical coordinates (North, East, Up) using standard transformations64,65. We interpolate the data to find the position of maximum intensity, corresponding to the location of the free surface64.
Directional spectrum
We estimate the directional spectrum from the free-surface profiles of the four slanted beams using the DIWASP toolbox66. Consequently, we are able to determine angular spreading and directionality of a sea state. DIWASP uses a number of methods to estimate the directional spectrum from the cross-power spectrum of the data: direct Fourier transform method (DFTM), extended maximum likelihood method (EMLM), iterated maximum likelihood method (IMLM), extended maximum entropy principle (EMEP), and Bayesian direct method (BDM)66.
However, the estimations are not perfect due to limited information and unknown factors. The EMLM spectrum is often more directionally-diffused with a lower peak. The EMEP spectrum produces a good directional spreading. However, although the peak is higher than EMLM, it is below the desired result67. EMEP and BDM can give very similar spreading results, but their peak values often differ significantly68,69. EMEP can calculate bi-directionality, while BDM is less sensitive to probe layout and more robust against errors68. In our analysis, we consider the BDM spectrum.
Wave parameters
The significant wave height Hs is defined as the mean value H1/3 of the highest one-third of wave heights. It can be estimated either from a zero-crossing analysis or more easily but approximately from the omnidirectional surface spectrum \(S(f)={\int }_{0}^{2\pi }\,{S}_{d}(f,\theta )\,d\theta \) as Hs ≈ 4σ, where \(\sigma =\sqrt{{m}_{0}}\) is the standard deviation of surface elevations, \({m}_{j}=\int S(f){f}^{j}{\rm{d}}f\) denotes spectral moments. Further, Sd(f,θ) is the directional wave spectrum with θ as the direction of waves of frequency f, and the cyclic frequency is ω = 2πf. In this paper, we use the spectral-based estimate, which is 5–10% larger than the actual H1/3 estimated from the actual time series.
The dominant wave period Tp = 2π/ωp follows from the cyclic frequency ωp of the spectral peak and T0 is the observed mean zero-crossing wave period. For Gaussian seas, this is equal to 2π/ω0, with \({\omega }_{0}=\sqrt{{m}_{2}/{m}_{0}}\). The associated wavelength L0 = 2π/k0 follows from the linear dispersion relation \({\omega }_{0}=\sqrt{g{k}_{0}\,\tan \,{\rm{h}}({k}_{0}d)}\), with d the water depth. The ‘mean’ or central frequency ωm of the spectrum is defined as ωm = m1/m0 3 and the associated mean period Tm is 2π/ωm. Theoretical NB steepness3,49 is defined as μm = kmσ, where km is the mean wavenumber corresponding to ωm via the linear dispersion relation
The group velocity
where ωm' is the first derivative of the mean frequency with respect to the wavenumber km.
The spectral bandwidth ν = (m0m2/m12 − 1)1/2 gives a measure of the frequency spreading. For unimodal directional spectra, as those analyzed in this study, the angular spreading \({\sigma }_{\theta }=\sqrt{{\int }_{0}^{2\pi }D(\theta ){(\theta -{\theta }_{m})}^{2}{\rm{d}}\theta }\), where the angular spreading function \(D(\theta )={\int }_{0}^{\infty }{S}_{d}(\omega ,\theta ){\rm{d}}\omega /{\sigma }^{2}\) and \({\theta }_{m}={\int }_{0}^{2\pi }\,D(\theta )\theta {\rm{d}}\theta \) is the mean direction. In general, \({\omega }_{0}={\omega }_{m}\sqrt{1+{\nu }^{2}}\). Furthermore, we define R = σθ2/2ν2 as a dimensionless measure of the directionality of a sea state37,70. In terms of ωm, km and qm = kmd based on the spectral centroid, the directional factor is given by40
and the depth factor40
where
and
The nonlinear interaction coefficient is40
where \({c}_{S}=\sqrt{gd}\) is the phase velocity in shallow waters,
accounts for the wave-induced setdown40, and
Statistical parameters
The normalized covariance function of zero-mean surface displacement η(t) is defined as \(\psi (\tau )=\overline{\eta (t)\eta (t+\tau )}/{\sigma }^{2}\). An alternative measure for the spectral bandwidth is given by the Boccotti parameter ψ* = |ψ(τ*)|, which is the absolute value of the first minimum of ψ at τ = τ* 9 and \({\ddot{\psi }}^{\ast }=\ddot{\psi }({\tau }^{\ast })\) the corresponding second derivative with respect to τ.
Skewness coefficient λ3 and excess kurtosis λ40 of the zero-mean surface elevation η(t) are given by
Here, overbars imply statistical averages and σ is the standard deviation of surface elevations. Clearly, the wave steepness μ = λ3/3 6 relates to the skewness coefficient λ3 of surface elevations. For third-order nonlinear (NB) random seas the excess kurtosis37,38
comprises a dynamic component λ40d due to nonlinear quasi-resonant wave-wave interactions39 and a Stokes bound harmonic contribution λ40b 41. Drawing on40 and using parameters based on ωm, km and qm = kmd, wave skewness and bound excess kurtosis for narrowband (NB) waves in intermediate water are given by
where
where
contributes positively to the wave induced setdown40 due to the directional spread of waves. Assuming that the linear crest heights (ξ0) scaled with surface rms are Rayleigh-distributed, the mean wave-induced setdown in the still water level is given by 〈ξ02〉μmΔ = 2μmΔ, where brackets denote statistical average.
When ΔST = 0, some algebra shows that λ3,NB is the same as the original Marthinsen-Winterstein formulation49,71, developed nearly three decades ago in the form:
where
The coefficients D1 and D2 arise from the frequency-difference and frequency-sum terms of second-order wave-wave interactions. Note that D1 = 2Δ and D2 = 2α exactly in unidirectional waves for which ΔST = 0. Unfortunately, Eq. (13) are not valid in relatively shallow water depths as second and third-order terms of the associated Stokes expansion can be larger than the linear term (see Eq. (A18) in41) because of the divergent nature of α and β. Thus, the relative validity of the preceding results essentially assumes the constraints αμm ≤ 1 and βμm/α ≤ 1. These are satisfied for all seas states of both storms studied here.
Miche-Stokes upper limit
In Gaussian seas, surface displacements and thus wave and crest heights have unbounded ranges. In reality, surface elevations are neither exactly Gaussian nor unbounded. And, the crest-to-trough height of a large wave whose steepness approaches the Stokes limiting steepness is unlikely to exceed an upper bound. For long-crested waves in transitional water depths, Miche59 approximated this upper bound as
where σ is the standard deviation of the sea state, k is the wavenumber and d the water depth. Following Tayfun45 the corresponding Miche-Stokes limit for crest heights is estimated as
The Miche-Stokes limit can be rewritten as a function of wave period T via the linear dispersion relation. Finally, note that in realistic oceanic seas, nonlinear wave dispersion is effective in limiting the wave growth as a precursor to breaking21,22,23. Thus, in wave fields generated by intense storms, the onset of breaking can occur well below the preceding Miche-Stokes type upper bounds22,24,25.
The Tayfun-Fedele model for crest heights
We define P(ξ) as the probability that a wave crest observed at a fixed point of the ocean in time exceeds the threshold ξHs. For weakly nonlinear nonlinear seas, this probability can be described by the third-order Tayfun-Fedele model4,
where ξ0 follows from the quadratic equation ξ = ξ0 + 2μξ02. Here, μ = λ3/3 is the Tayfun steepness: it represents an integral measure of wave steepness and relates to second-order bound nonlinearities. The parameter Λ = λ40 + 2λ22 + λ04 is a relative measure of third-order nonlinearities expressed in terms of the fourth-order cumulants λnm of surface elevation η and its Hilbert transform \(\hat{\eta }\)4. In particular, \({\lambda }_{22}=\overline{{\eta }^{2}{\hat{\eta }}^{2}}/{\sigma }^{4}-1\) and \({\lambda }_{04}=\overline{{\hat{\eta }}^{4}}/{\sigma }^{4}-3\). In this study, Λ is approximated solely in terms of the excess kurtosis as Λappr = 8λ40/3. This approximation follows from the NB relations between cumulants43,72 λ22 = λ40/3 and λ04 = λ40, valid as the spectral bandwidth ν tends to zero. Numerical computations1 indicate that Λ ≈ Λappr with an error of about 3% in wave fields where second-order nonlinearities are dominant, in agreement with observations35,73.
For second-order seas, Λ = 0 and PTF in Eq. (19) leads to the Tayfun wave-crest distribution3,6
where ξ = ξ0 + 2μξ02. For Gaussian seas, ξ0 = ξ since μ = 0 and Λ = 0, and PTF reduces to the Rayleigh distribution
Note that the Tayfun distribution represents an exact theoretical result for large second-order wave crest heights and it depends solely on the steepness parameter defined as μ = λ3/36.
The Forristall’s Weibull model for crest heights
The exceedance probability for crest heights is given by8
where α = 0.3536 + 0.2561S1 + 0.0800Ur, β = 2 − 1.7912S1 − 0.5302Ur + 0.284Ur2 for multi-directional (short-crested) seas. Here, S1 = 2πHs/(gTm2) is a characteristic wave steepness and the Ursell number Ur = Hs/(km2d3), where km is the wavenumber associated with the mean period Tm.
The generalized Boccotti and Tayfun models for crest-to-trough wave heights
The third-order nonlinear statistics for crest-to-trough wave heights is described in terms of the generalized Boccotti distribution10
and the Boccotti parameters9 ψ* and \({\ddot{\psi }}^{\ast }\) are defined above in the section where statistical parameters are described. For Gaussian seas (Λ = 0), the original Boccotti9 model is recovered
The Tayfun model for wave heights is given by4,74
where rm = r(Tm/2) is the value of the envelope r(t) of the covariance ψ(t) at t = Tm/2. Finally we note that as spectral bandwidth ν tends to zero, all three parameters ψ*, \({\ddot{\psi }}^{\ast }\) and rm tend to unity, and the Boccotti and Tayfun distributions both reduce to the Rayleigh distribution given by
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Fedele, F., Brennan, J., Ponce de León, S., Dudley, J. & Dias, F. Real world ocean rogue waves explained without the modulational instability. Scientific Reports 6, 27715 (2016).
Fedele, F., Lugni, C. & Chawla, A. The sinking of the El Faro: predicting real world rogue waves during Hurricane Joaquin. Scientific Reports 7, 11188 (2017).
Tayfun, M. A. Narrow-band nonlinear sea waves. Journal of Geophysical Research: Oceans 85, 1548–1552, https://doi.org/10.1029/JC085iC03p01548 (1980).
Tayfun, M. A. & Fedele, F. Wave-height distributions and nonlinear effects. Ocean Engineering 34, 1631–1649, https://doi.org/10.1016/j.oceaneng.2006.11.006 (2007).
Fedele, F. Rogue waves in oceanic turbulence. Physica D 237, 2127–2131 (2008).
Fedele, F. & Tayfun, M. A. On nonlinear wave groups and crest statistics. J. Fluid Mech 620, 221–239 (2009).
Shemer, L., Sergeeva, A. & Liberzon, D. Effect of the initial spectrum on the spatial evolution of statistics of unidirectional nonlinear random waves. Journal of Geophysical Research: Oceans 115, https://doi.org/10.1029/2010JC006326 (2010).
Forristall, G. Z. Wave crest distributions: Observations and second-order theory. Journal of Physical Oceanography 30, 1931–1943 (2000).
Boccotti, P. Wave Mechanics for Ocean Engineering (Elsevier Sciences, Oxford, 2000).
Alkhalidi, M. A. & Tayfun, M. A. Generalized Boccotti distribution for nonlinear wave heights. Ocean Engineering 74, 101–106 (2013).
Petrova, P. G., Tayfun, M. A. & Guedes Soares, C. The effect of third-order nonlinearities on the statistical distributions of wave heights, crests and troughs in bimodal crossing seas. ASME Journal of Offshore Mechanics and Arctic Engineering 135, 021801 (2013).
Petrova, P. G. & Guedes Soares, C. Distributions of nonlinear wave amplitudes and heights from laboratory generated following and crossing bimodal seas. Natural Hazards and Earth System Sciences 14, 1207–1222 (2014).
Petrova, P. G. & Guedes Soares, C. Validation of the Boccotti’s generalized model for large nonlinear wave heights from laboratory mixed sea states. Applied Ocean Research 53, 297–308 (2015).
Gibson, R., Christou, M. & Feld, G. The statistics of wave height and crest elevation during the December 2012 storm in the North Sea. Ocean Dynamics 64, 1305–1317 (2014).
Katsardi, V., de Lutio, L. & Swan, C. An experimental study of large waves in intermediate and shallow water depths. Part I: Wave height and crest height statistics. Coastal Engineering 73, 43–57 (2013).
Cox, R., Zentner, D. B., Kirchner, B. J. & Cook, M. S. Boulder ridges on the Aran Islands (Ireland): recent movements caused by storm waves, not tsunamis. The Journal of Geology 120, 249–272 (2012).
Cox, R., Jahn, K. L., Watkins, O. G. & Cox, P. Extraordinary boulder transport by storm waves (west of Ireland, winter 2013–2014) and criteria for analysing coastal boulder deposits. Earth Science Reviews 177, 623–636 (2018).
Herterich, J. G. & Dias, F. Extreme long waves over a varying bathymetry. Journal of Fluid Mechanics 878, 481–501, https://doi.org/10.1017/jfm.2019.618 (2019).
Herterich, J. G., Cox, R. & Dias, F. How does wave impact generate large boulders? Modelling hydraulic fracture of cliffs and shore platforms. Marine Geology 399, 34–46 (2018).
Zakharov, V. E. Stability of periodic waves of finite amplitude on the surface of a deep fluid. J. Appl. Mech. Tech. Phys. 9, 190–194 (1968).
Fedele, F. On certain properties of the compact Zakharov equation. Journal of Fluid Mechanics 748, 692–711 (2014).
Fedele, F., Chandre, C. & Farazmand, M. Kinematics of fluid particles on the sea surface: Hamiltonian theory. Journal of Fluid Mechanics 801, 260–288, https://doi.org/10.1017/jfm.2016.453 (2016).
Fedele, F. Geometric phases of water waves. EPL (Europhysics Letters) 107, 69001 (2014).
Barthelemy, X. et al. On a unified breaking onset threshold for gravity waves in deep and intermediate depth water. Journal of Fluid Mechanics 841, 463–488 (2018).
Saket, A., Peirson, W. L., Banner, M. L., Barthelemy, X. & Allis, M. J. On the threshold for wave breaking of two-dimensional deep water wave groups in the absence and presence of wind. Journal of Fluid Mechanics 811, 642–658, https://doi.org/10.1017/jfm.2016.776 (2017).
Shemer, L. On kinematics of very steep waves. Natural Hazards and Earth System Science 13, 2101–2107 (2013).
Shemer, L. & Liberzon, D. Lagrangian kinematics of steep waves up to the inception of a spilling breaker. Physics of Fluids 26, 016601, https://doi.org/10.1063/1.4860235 (2014).
Shemer, L. & Alperovich, S. Peregrine breather revisited. Physics of Fluids 25, 051701 (2013).
Benney, D. J. & Roskes, G. J. Wave instabilities. Studies in Applied Mathematics 48, 377–385 (1969).
Benjamin, T. B., Hasselmann, K. & Lighthill, M. J. Instability of periodic wavetrains in nonlinear dispersive systems. Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences 299, 59–76, https://doi.org/10.1098/rspa.1967.0123 (1967).
Hur, V. M. & Pandey, A. K. Modulational instability in a full-dispersion shallow water model. Studies in Applied Mathematics 142, 3–47, https://doi.org/10.1111/sapm.12231 (2019).
Hayes, W. D. Group velocity and nonlinear dispersive wave propagation. Proceedings of the Royal Society of London. A. Mathematical and Physical Sciences 332, 199–221 (1973).
Davey, A. & Stewartson, K. On three-dimensional packets of surface waves. Proceedings of the Royal Society of London. A. Mathematical and Physical Sciences 338, 101–110 (1974).
Toffoli, A. et al. Experimental evidence of the modulation of a plane wave to oblique perturbations and generation of rogue waves in finite water depth. Physics of Fluids 25, 091701 (2013).
Fedele, F., Cherneva, Z., Tayfun, M. A. & Soares, C. G. Nonlinear Schrödinger invariants and wave statistics. Physics of Fluids 22, 036601, https://doi.org/10.1063/1.3325585 (2010).
Osborne, A. R., Onorato, M. & Serio, M. The nonlinear dynamics of rogue waves and holes in deep-water gravity wave trains. Phys. Lett. A 275, 386–393 (2000).
Janssen, P. A. E. M. & Bidlot, J. R. On the extension of the freak wave warning system and its verification. Tech. Memo 588, ECMWF (2009).
Janssen, P. A. E. M. Nonlinear four-wave interactions and freak waves. Journal of Physical Oceanography 33, 863–884 (2003).
Fedele, F. On the kurtosis of ocean waves in deep water. Journal of Fluid Mechanics 782, 25–36 (2015).
Janssen, P. A. E. M. Shallow-water version of the freak wave warning system. Tech. Memo 813, ECMWF (2017).
Janssen, P. A. E. M. On some consequences of the canonical transformation in the Hamiltonian theory of water waves. Journal of Fluid Mechanics 637, 1–44 (2009).
Alber, I. E. The effects of randomness on the stability of two-dimensional surface wavetrains. Proceedings of the Royal Society of London. Series A, Mathematical and Physical Sciences 363, 525–546 (1978).
Tayfun, M. A. & Lo, J. Nonlinear effects on wave envelope and phase. J. Waterway, Port, Coastal and Ocean Eng. 116, 79–100 (1990).
Tayfun, M. A. & Alkhalidi, M. A. Distribution of surface elevations in nonlinear seas. Offshore Technology Conference Asia, Kuala Lumpur, Malaysia, 22–25 March (2016).
Tayfun, M. A. Distributions of envelope and phase in wind waves. Journal of Physical Oceanography 38, 2784–2800, https://doi.org/10.1175/2008JPO4008.1 (2008).
Christou, M. & Ewans, K. Field measurements of rogue water waves. Journal of Physical Oceanography 44, 2317–2335, https://doi.org/10.1175/JPO-D-13-0199.1 (2014).
Annenkov, S. Y. & Shrira, V. I. Large-time evolution of statistical moments of wind–wave fields. Journal of Fluid Mechanics 726, 517–546, https://doi.org/10.1017/jfm.2013.243 (2013).
Annenkov, S. Y. & Shrira, V. I. Evaluation of skewness and kurtosis of wind waves parameterized by JONSWAP spectra. Journal of Physical Oceanography 44, 1582–1594, https://doi.org/10.1175/JPO-D-13-0218.1 (2014).
Tayfun, M. A. Statistics of nonlinear wave crests and groups. Ocean Engineering 33, 1589–1622, https://doi.org/10.1016/j.oceaneng.2005.10.007 (2006).
Adler, R. J. On excursion sets, tube formulas and maxima of random fields. The Annals of Applied Probability 10, 1–74 (2000).
Fedele, F. & Arena, F. Long-term statistics and extreme waves of sea storms. Journal of Physical Oceanography 40(5), 1106–1117 (2010).
Fedele, F. Space–time extremes in short-crested storm seas. Journal of Physical Oceanography 42, 1601–1615, https://doi.org/10.1175/JPO-D-11-0179.1 (2012).
Walker, D., Taylor, P. & Taylor, R. E. The shape of large surface waves on the open sea and the Draupner new year wave. Applied Ocean Research 26, 73–83, https://doi.org/10.1016/j.apor.2005.02.001 (2004).
Adcock, T., Taylor, P., Yan, S., Ma, Q. & Janssen, P. Did the Draupner wave occur in a crossing sea? Proceedings of the Royal Society A: Mathematical, Physical and Engineering Science rspa20110049 (2011).
Cavaleri, L. et al. The Draupner wave: a fresh look and the emerging view. Journal of Geophysical Research: Oceans 121, 6061–6075 (2016).
Brennan, J., Dudley, J. & Dias, F. Extreme waves in crossing sea states. International Journal of Ocean and Coastal Engineering 01, 1850001 (2018).
Longuet-Higgins, M. S. & Stewart, R. W. Radiation stresses in water waves: a physical discussion, with applications. Deep-Sea Research II, 529–562 (1964).
Dysthe, K. B., Krogstad, H. E. & Muller, P. Oceanic rogue waves. Annual Review of Fluid Mechanics 40, 287–310 (2008).
Miche, R. Mouvements ondulatoires de la mer en profondeur constante ou décroissante (in French). Ann. des Ponts et Chaussées 121, 285–318 (1944).
Teledyne, RD Instruments. Acoustic Doppler Current Profiler: Principles of Operation - A Practical Primer. Teledyne, RD Instruments, Technical manual (2011).
Tayfun, M. A. Sampling rate errors in statistics of wave heights and periods. Journal of Waterway, Port, Coastal, and Ocean Engineering 119, 172–192, https://doi.org/10.1061/(ASCE)0733-950X(1993)119:2(172) (1993).
Benetazzo, A., Fedele, F., Gallego, G., Shih, P.-C. & Yezzi, A. Offshore stereo measurements of gravity waves. Coastal Engineering 64, 127–138 (2012).
Fedele, F. et al. Space–time measurements of oceanic sea states. Ocean Modelling 70, 103–115 (2013).
Flanagan, J. D. et al. Extreme water waves off the west coast of Ireland: Analysis of ADCP measurements. In The 26th International Ocean and Polar Engineering Conference (International Society of Offshore and Polar Engineers, 2016).
Teledyne, R. D. Instruments. ADCP coordinate transformation: formulas and calculations. Teledyne, RD Instruments, Technical manual (2010).
Johnson, D. DIWASP, a directional wave spectra toolbox for MATLAB: User Manual. Research Report WP-1601-DJ (V1.1). Tech. Rep., Centre for Water Research, University of Western Australia (2002).
Draycott, S. et al. Re-creation of site-specific multi-directional waves with non-collinear current. Ocean Engineering 152, 391–403 (2018).
Hashimoto, N. Analysis of the directional wave spectrum from field data. Advances in Coastal and Ocean Engineering 3, 103–144 (1997).
Draycott, S. et al. Using a phase-time-path-difference approach to measure directional wave spectra in FloWave. In EWTEC Conference Proceedings (2015).
Mori, N., Onorato, M. & Janssen, P. A. E. M. On the estimation of the kurtosis in directional sea states for freak wave forecasting. Journal of Physical Oceanography 41, 1484–1497, https://doi.org/10.1175/2011JPO4542.1 (2011).
Marthinsen, T. & Winterstein, S. R. On the skewness of random surface waves. In The Second International Offshore and Polar Engineering Conference, ISOPE-I-92-279, 7 (International Society of Offshore and Polar Engineers, San Francisco, California, USA, 1992).
Mori, N. & Janssen, P. A. E. M. On kurtosis and occurrence probability of freak waves. Journal of Physical Oceanography 36, 1471–1483 (2006).
Tayfun, M. A. & Fedele, F. Expected shape of extreme waves in storm seas. In ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2007–29073 (American Society of Mechanical Engineers, 2007).
Tayfun, M. A. Distribution of large wave heights. Journal of Waterway, Port, Coastal, and Ocean Engineering 116, 686–707 (1990).
Acknowledgements
This study was funded by Science Foundation Ireland (SFI) under the research project ‘Understanding Extreme Nearshore Wave Events through Studies of Coastal Boulder Transport’ (14/US/E3111). This work is partially supported by SFI through Marine Renewable Energy Ireland (MaREI), the SFI Centre for Marine Renewable Energy Research (12/RC/2302). The authors thank Eugene Terray and Jason Flanagan for their comments and suggestions, and students Caroline Brennan and Daniel Raftery for their early project work with this data. The authors are grateful to Teledyne RD Instruments (TRDI) for providing the ADCP and for their useful contributions.
Author information
Authors and Affiliations
Contributions
The concept and design were provided by F. Fedele, who coordinated the scientific effort together with J. Herterich, A. Tayfun and F. Dias. J. Herterich and F. Dias managed the experimental campaigns for ADCP measurements. The wave statistical analysis was performed by F. Fedele. The overall supervision was provided by F. Fedele; A. Tayfun made incisive intellectual contributions. All authors participated in the analysis and interpretation of results and the writing of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Fedele, F., Herterich, J., Tayfun, A. et al. Large nearshore storm waves off the Irish coast. Sci Rep 9, 15406 (2019). https://doi.org/10.1038/s41598-019-51706-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-019-51706-8
This article is cited by
-
Large waves and navigation hazards of the Eastern Mediterranean Sea
Scientific Reports (2022)
-
Generation mechanism and prediction of an observed extreme rogue wave
Scientific Reports (2022)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
