
Abstract
Finite-size scaling is a key tool in statistical physics, used to infer critical behavior in finite systems. Here we have made use of the analogous concept of finite-time scaling to describe the bifurcation diagram at finite times in discrete (deterministic) dynamical systems. We analytically derive finite-time scaling laws for two ubiquitous transitions given by the transcritical and the saddle-node bifurcation, obtaining exact expressions for the critical exponents and scaling functions. One of the scaling laws, corresponding to the distance of the dynamical variable to the attractor, turns out to be universal, in the sense that it holds for both bifurcations, yielding the same exponents and scaling function. Remarkably, the resulting scaling behavior in the transcritical bifurcation is precisely the same as the one in the (stochastic) Galton-Watson process. Our work establishes a new connection between thermodynamic phase transitions and bifurcations in low-dimensional dynamical systems, and opens new avenues to identify the nature of dynamical shifts in systems for which only short time series are available.
Similar content being viewed by others

Introduction
Bifurcations separate qualitatively different dynamics in dynamical systems as one or more parameters are changed. Bifurcations have been mathematically characterized in elastic-plastic materials1, electronic circuits2, or in open quantum systems3. Also, bifurcations have been theoretically described in population dynamics4,5,6, in socioecological systems7,8, as well as in fixation of alleles in population genetics and computer virus propagation, to name a few examples9,10. More importantly, bifurcations have been identified experimentally in physical11,12,13,14, chemical15,16, and biological systems17,18. The simplest cases of local bifurcations, such as the transcritical and the saddle-node bifurcations, only involve changes in the stability and existence of fixed points.
Although, strictly speaking, attractors (such as stable fixed points) are only reached in the infinite-time limit, some studies near local bifurcations have focused on the dependence of the characteristic time needed to approach the attractor as a function of the distance of the bifurcation parameter to the bifurcation point. For example, for the transcritical bifurcation it is known that the transient time, τ, diverges as a power law19, as τ ~ |μ − μc|−1, with μ and μc being the bifurcation parameter and the bifurcation point, respectively, while for the saddle-node bifurcation20 this time goes as τ ~ |μ − μc|−1/2 (see12 for an experimental evidence of this power law in an electronic circuit).
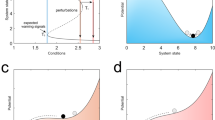
Thermodynamic phase transitions21,22, where an order parameter suddenly changes its behavior as a response to small changes in one or several control parameters, can be considered as bifurcations23. Three important peculiarities of thermodynamic phase transitions within this picture are that the order parameter has to be equal to zero in one of the phases or regimes, that the bifurcation does not arise (in principle) from a simple low-dimensional dynamical system but from the cooperative effects of many-body interactions, and that at thermodynamic equilibrium there is no (macroscopic) dynamics at all. Non-equilibrium phase transitions24,25 are also bifurcations and share these characteristics, except the last one. Particular interest has been paid to second-order phase transitions, where the sudden change of the order parameter is nevertheless continuous and associated to the existence of a critical point.
A key ingredient of second-order phase transitions is finite-size scaling26,27, which describes how the sharpness of the transition emerges in the thermodynamic (infinite-system) limit. For instance, if m is magnetization (order parameter), T temperature (control parameter), and \(\ell \) system’s size, then for zero applied field and close to the critical point, the equation of state can be approximated as a finite-size scaling law,
with Tc the critical temperature, β and ν two critical exponents, and g[y] a scaling function fulfilling g[y] ∝ (−y)β for y → −∞ and g[y] → 0 for y → ∞.
It has been recently shown that the Galton-Watson branching process (a fundamental stochastic model for the growth and extinction of populations, nuclear reactions, and avalanche phenomena) can be understood as displaying a second-order phase transition28 with finite-size scaling29,30. In a similar spirit, in this article we show how bifurcations in one-dimensional discrete dynamical systems display “finite-time scaling”, analogous to finite-size scaling with time playing the role of system size. We analyze the transcritical and the saddle-node bifurcations for iterated maps and find analytically well-defined scaling functions that generalize the bifurcation diagrams for finite times. The sharpness of each bifurcation is naturally recovered in the infinite-time limit. The finite-size behavior of the Galton-Watson process becomes just one instance of our general finding for the transcritical bifurcation. And as a by-product, we derive the power-law divergence of the characteristic time τ when μ is kept constant, off criticality19,20.
Universality of Convergence to Attractive Fixed Points
In this paper, we consider a one-dimensional discrete dynamical system, or iterated map, xn+1 = f(xn), where x is a real variable, f(x) is a univariate function (which will depend on some non-explicit parameters) and n is discrete time. It is assumed that the map has an attractive (i.e., stable) fixed point at x = q, for which f(q) = q, with |f ′(q)| < 1, where the prime denotes the derivative20. Moreover, the initial condition, x0, is assumed to belong to the basin of attraction of the fixed point. Additional conditions on x0 will be discussed below.
We are interested in the behavior of xn = f n(x0) for large but finite n, where f n(x0) denotes the iterated application of the map n times. Naturally, for sufficiently large n, f n(x0) will be close to the attractive fixed point q and we will be able to expand f(f n(x0)) around q, resulting in
with
By rearranging and introducing the variable cn+1, the inverse of the “distance” to the fixed point at iteration n + 1, we arrive at
(we may talk about a distance because we calculate the difference in such a way that it is always positive). Iterating this transformation \(\ell \) times leads to
where only the lowest-order terms have been considered29. When the variable z, defined as \(z={\ell }^{\alpha }(M-1)\), is kept finite (with \(\ell \to \infty \) and M → 1) a non-trivial limit of the previous expression exists if α = 1. It is found that the right-hand side of the expression is dominated by the second term, which grows linearly with \(\ell \). Therefore, for large \(\ell \), we arrive at \({c}_{n+\ell }\simeq C\ell ({e}^{z}-1){e}^{-z}/z\), and taking the inverse, we obtain
with scaling function
Observe that the sequence \({\{{f}^{\ell }({x}_{0})\}}_{\ell =1}^{\infty }\) is convergent and thus, for \(\ell \) large enough with respect to n, \({f}^{\ell +n}({x}_{0})\simeq {f}^{\ell }({x}_{0})\). Consequently,
This is exactly the same result as the one derived in ref.29 for the Galton-Watson model, leading to the realization that this model is governed by a transcritical bifurcation (but restricted to a fixed initial condition x0 = 0).
The scaling law (4) means that any attractor of a one-dimensional map is approached in the same universal way, as long as a Taylor expansion as the one in Eq. (2) holds, in particular if f ″(q) ≠ 0. In this sense one may talk about a “universality class”, as displayed in Fig. 1. The idea is that for each value of the number of iterations \(\ell \) one has to pick a value of M (which depends on the parameters of f(x)) for which \(z=\ell (M-1)\) (the rescaled difference concerning the point M = 1) remains constant. Note that, in order to have a finite z, as \(\ell \) is large, M = f ′(q) will be close to 1, implying that the system will be close to its bifurcation point, corresponding to M = 1 (where the attractive fixed point will lose its stability). Therefore, in the scaling law, C can be replaced by its value at the bifurcation point \({C}_{\ast }\), so, we write \(C={C}_{\ast }\) in Eq. (4).

(a) Distance between the \(\ell \)–th iteration of the logistic map (lo) and its attractor, as a function of the bifurcation parameter μ, for different values of \(\ell \). (b) The same data under rescaling (decreasing the density of points, for clarity sake), together with data from the transcritical bifurcation in normal form (tc) and the saddle-node bifurcation (sn). The collapse of the curves into a single one validates the scaling law, Eq. (4), and its universal character. The scaling function is in agreement with G(−|y|). Note that the initial condition x0 is taken uniformly randomly between 0.25 and 0.75, which is inside the range necessary for all the iterations to be above the fixed point. This range is, below the bifurcation point, 0 < x0 < 1 (lo), 0 < x0 < 1 + μ (tc), and, above, 1 − μ−1 < x0 < μ−1 (lo), μ < x0 < 1 (tc), \(\sqrt{\mu } < {x}_{0} < 1-\sqrt{\mu }\) (sn).
In principle, the value of the initial condition x0 is not of fundamental importance. The same results can be obtained, for example, by taking x1 = f(x0) as the initial condition and then replacing \(\ell \) by \(\ell -1\) because, for very large \(\ell \), \(\ell \simeq \ell -1\). Therefore, as \(\ell \) grows, memory of the initial condition is erased, as \(\ell \) can be made as large as desired. However, x0 has to fulfill x0 < q if \({C}_{\ast } > 0\) and x0 > q if \({C}_{\ast } < 0\), in the same way that all the iterations xn must also satisfy these inequalities (i.e., all the iterations have to be on the same “side” of the point q, see the caption of Fig. 1 for the concrete conditions). The scaling law implies that plotting \([q-{f}^{\ell }({x}_{0})]{C}_{\ast }\ell \) as a function of \(\ell (M-1)\) must yield a data collapse of the curves corresponding to different values of \(\ell \) onto the scaling function G.
For example, for the logistic (lo) map20, f(x) = flo(x) = μx(1 − x), a transcritical bifurcation takes place at μ = 1 and the attractor is at q = 0 for μ ≤ 1 and at q = 1 − 1/μ for μ ≥ 1, which leads to \({M}_{lo}={f}_{lo}^{^{\prime} }(q)=\mu \) for μ ≤ 1 and Mlo = 2 − μ for μ ≥ 1, and also to \({C}_{lo\ast }=-\,1\). Therefore, \(z=\ell (M-1)=-\,\ell |\mu -1|\) and \({f}_{lo}^{\ell }({x}_{0})-q\simeq {\ell }^{-1}\)\(G(-\ell |\mu -1|)\) for x0 > q. Thus, in order to verify the collapse of the curves onto the function G, the quantity \([\,{f}_{lo}^{\ell }({x}_{0})-q]\ell \) must be displayed as a function of −\(\ell |\mu -1|\); if the resulting plot does not change with the value of \(\ell \) the scaling law can be considered to hold. Alternatively, the two regimes \(\mu \,\gtrless \,1\), can be observed by writing \([\,{f}_{lo}^{\ell }({x}_{0})-q]\ell \) as a function of \(y=\ell (\mu -1)\). In the latter case the scaling function turns out to be G(−|y|). Figure 1(b) shows precisely this; the nearly perfect data collapse for large \(\ell \) is the indication of the fulfillment of the finite-time scaling law. For comparison, Fig. 1(a) shows the same data with no rescaling (i.e., just the distance to the attractor as a function of the bifurcation parameter μ). In the case of the normal form of the transcritical (tc) bifurcation (in the discrete case), ftc(x) = (1 + μ)x − x2, the bifurcation takes place at μ = 0 (with q = 0 for μ ≤ 0 and q = μ for μ ≥ 0). This leads to exactly the same behavior for \(z=-\,\ell |\mu |\) (or for \(y=\ell \mu \) in order to separate the two regimes, as shown overimposed in Fig. 1(b), again with very good agreement).
For the saddle-node (sn) bifurcation (also called fold or tangent bifurcation31), in its normal form (discrete system), fsn(x) = μ + x − x2, the attractor is at \(q=\sqrt{\mu }\) (only for μ > 0), so the bifurcation is at μ = 0, which leads to \({M}_{sn}=1-2\sqrt{\mu }\) and \({C}_{sn\ast }=-\,1\). The scaling law can be written as
To see the data collapse onto the function G one must represent \([{f}_{sn}^{\ell }({x}_{0})-\sqrt{\mu }]\ell \) as a function of \(z=-\,2\ell \sqrt{\mu }\) (or as a function of y = −z for clarity sake, as shown also in Fig. 1(b)). In order to create a horizontal axis that is linear in μ, we first define \(z=-\,\sqrt{u}\), in which case \({f}_{sn}^{\ell }({x}_{0})-\sqrt{\mu }\simeq F(4{\ell }^{2}\mu )/\ell \), with a transformed scaling function \(F(u)=G(\,-\,\sqrt{u})=\sqrt{u}/({e}^{\sqrt{u}}-1),\) and then use \(u=-\,{z}^{2}=4{\ell }^{2}\mu \) for the horizontal axis of the rescaled plot.
Although the key idea of the finite-time scaling law, Eq. (4), is to compare the solution of the system at “corresponding” values of \(\ell \) and μ (such that z is constant, in a sort of law of corresponding states21), the law can also be used at fixed μ. At the bifurcation point (μ = μc, so z = 0), we find that the distance to the attractor decays hyperbolically, i.e., \(|\,{f}^{\ell }({x}_{0})-q|=|{C}_{\ast }\ell {|}^{-1}\), as it is well known, see for instance ref.19. Out of the bifurcation point, for non-vanishing μ − μc we have z → −∞ (as \(\ell \to \infty \)) and then G(z) → e−z, which leads to \({f}^{\ell }({x}_{0})-q\simeq {\ell }^{-1}\)\({e}^{-z}\simeq {e}^{-\ell /\tau }\), where, from the expression for z, we find that the characteristic time τ diverges as τ = 1/|μ − μc| for the transcritical bifurcation (both in normal form and in the logistic form) and as \(\tau =1/(2\sqrt{\mu -{\mu }_{c}})\) for the saddle-node bifurcation (with μc = 0 in the normal form)12. These laws, mentioned in the introduction, have been reported in the literature as scaling laws20, but in order to avoid confusion we propose calling them power-law divergence laws, and keep the term scaling law for behaviors such as those in Eqs (1), (4) and (5). Note that this sort of law arises because G(z) is asymptotically exponential for z → −∞; in contrast, the equivalent of G(z) in the equation of state of a magnetic system in the thermodynamic limit is a power law, which leads to the Curie-Weiss law32.
Scaling Law for the Distance to the Fixed Point at Bifurcation in the Transcritical Bifurcation
In some cases, the distance between \({f}^{\ell }({x}_{0})\) and some constant value of reference will be of more interest than the distance to the attractive fixed point q, as the value of q may change with the bifurcation parameter. For the transcritical bifurcation we have two fixed points, q0 and q1, and they collide and interchange their character (attractive to repulsive, and vice versa) at the bifurcation point. It will be assumed that q0 is constant independent of the bifurcation parameter (naturally, q1 will not be constant), and that “below” the bifurcation point q0 is attractive and q1 is repulsive, and vice versa “above” the bifurcation. We will be interested in the distance between q0 and \({f}^{\ell }({x}_{0})\), i.e., \({q}_{0}-{f}^{\ell }({x}_{0})\), which, below the bifurcation point corresponds to the quantity calculated previously in Eq. (4), but not above. The reason is that, there, q was an attractor, but now q0 can be attractive or repulsive. Note that, without loss of generality, we can refer \({q}_{0}-{f}^{\ell }({x}_{0})\) as the distance of \({f}^{\ell }({x}_{0})\) to the “origin”.
Following ref.29, we seek a relationship between both fixed points when the system is close to the bifurcation point. As, in that case, \({q}_{1}\simeq {q}_{0}\), we can expand f(q1) around q0 to obtain
which leads directly to
to the lowest order in (q1 − q0). Naturally, M0 = f ′(q0) and C0 = f ″(q0)/2. We also seek a relationship between M1 = f ′(q1) and M0. Expanding f ′(q1) around q0, \(f^{\prime} ({q}_{1})={M}_{1}={M}_{0}+2{C}_{0}({q}_{1}-{q}_{0})+{\mathscr{O}}{({q}_{1}-{q}_{0})}^{2},\) which, using Eq. (6), leads to
to the first order in (q1 − q0).
We now write \({q}_{0}-{f}^{\ell }({x}_{0})={q}_{0}-{q}_{1}+{q}_{1}-{f}^{\ell }({x}_{0})\). For q0 − q1 we will apply Eq. (6), and for \({q}_{1}-{f}^{\ell }({x}_{0})\) we can apply Eq. (4), as q1 is of attractive nature “above” the bifurcation point; then
(with C1 = f ″(q1)/2), and defining \(y=\ell ({M}_{0}-1)\) we obtain (with the form of the scaling function, Eq. (3)),
Using Eq. (7) it can be shown that
(so, the y introduced here is the same y introduced in the previous section), and therefore,
where we have also used that \({C}_{1}={C}_{0}={C}_{\ast }\), to the lowest order, with \({C}_{\ast }\) being the value at the bifurcation point. Therefore, we obtain the same scaling law as in the previous section:
with the same scaling function G(y) as in Eq. (3), although the rescaled variable y is different here (y ≠ z, in general). This is possible thanks to the property y + G(−y) = G(y) that the scaling function satisfies. Note that the scaling law (1) has the same form as the finite-time scaling (9) with y given by Eq. (8), and therefore we can identify β = ν = 1. Note also that we can identify M0 = f ′(q0) with a bifurcation parameter, as it is M0 < 1 “below” the bifurcation point (M0 = 1) and M0 > 1 “above”. In fact, M0 can be considered as a natural bifurcation parameter, as the scaling law (4) expressed in terms of M0 becomes universal. M defined in the previous section cannot be a bifurcation parameter as it is never above one because it is defined with respect to the attractive fixed point.
For the transcritical bifurcation of the logistic map we identify q0 = 0 and M0 = μ, so \(y=\ell (\mu -1)\). For the normal form of the transcritical bifurcation, q0 = 0 but M0 = μ + 1, so \(y=\ell \mu \). Consequently, Fig. 2(a) shows \({f}^{\ell }({x}_{0})\) (the distance to q0 = 0) as a function of μ, for the logistic map and different \(\ell \), whereas Fig. 2(b) shows the same results under the corresponding rescaling, together with analogous results for the normal form of the transcritical bifurcation. The data collapse supports the validity of the scaling law (9) with scaling function given by Eq. (3).

(a) \(\ell \)–th iteration of the logistic map as a function of the bifurcation parameter μ, for different values of \(\ell \). Same initial conditions as in previous figure. (b) Same data under rescaling (decreasing density of points), plus analogous data coming from the transcritical bifurcation in normal form. The data collapse shows the validity of the scaling law, Eq. (9), with scaling function G(y) from Eq. (3).
Scaling Law for the Iterated Value x n in the Saddle-Node Bifurcation
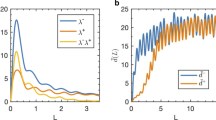
In the case of a saddle-node bifurcation, the \(\ell \)–th iterate can be isolated from Eq. (5) to obtain
with \(y=-\,z=2\ell \sqrt{\mu }\) and H(y) = y(ey + 1)(ey − 1)−1/2. Therefore, the representation of \(\ell {f}^{\ell }({x}_{0})\) as a function of \(2\ell \sqrt{\mu }\) unveils the shape of the scaling function H. In terms of \(u={y}^{2}=4{\ell }^{2}\mu \),
and, therefore, plotting \(\ell {f}^{\ell }({x}_{0})\) as a function of \(4{\ell }^{2}\mu \) must lead to the collapse of the data onto the scaling function I(u), as shown in Fig. 3. Comparison with the finite-size scaling law (1) allows one to establish β = ν = 1/2 for this bifurcation (and bifurcation parameter μ, not \(\sqrt{\mu }\)).

Conclusions
By means of scaling laws, we have made a clear analogy between bifurcations and phase transitions23, with a direct correspondence between, on the one hand, the bifurcation parameter, the bifurcation point, and the finite-time solution \({f}^{\ell }({x}_{0})\), and, on the other hand, the control parameter, the critical point, and the finite-size order parameter. However, in phase transitions, the sharp change of the order parameter at the critical point arises in the limit of infinite system size; in contrast, in bifurcations, the sharpness at the bifurcation point shows up in the infinite-time limit, \(\ell \to \infty \). So, finite-size scaling in one case corresponds to finite-time scaling in the other. Specifically, we conclude that the finite-size scaling behavior derived in ref.29 can be directly understood from the transcritical bifurcation underlying the Galton-Watson branching process. It is remarkable that the critical behavior of such a stochastic process is governed by a bifurcation of a deterministic dynamical system.
Moreover, by using numerical simulations we have tested that the finite-time scaling laws also hold for dynamical systems continuous in time, as well as for the pitchfork bifurcation in discrete time, although with different exponents and scaling function in this case (this is due to the fact that the condition f ″(q) ≠ 0 does not hold). The use of the finite-time scaling concept by other authors does not correspond with ours. For instance, although ref.33 presents a scaling law for finite times, the corresponding exponent ν there turns out to be negative, which is not in agreement with the genuine finite-size scaling around a critical point. In addition, we have also been able to derive the power-law divergence of the transient time to reach the attractor out of criticality12,19,20.
Our results could be useful for interpreting different types of fixed points found in renormalization group theory23. Also, they might allow to idenfity the type of bifurcations in systems for which information is limited to short transients, such as in ecological systems. In this way, the scaling relations established in this article could be used as warning signals34 to anticipate the nature of collapses or changes in ecosystems5,6,34,35,36 (due to, e.g., transcritical or saddle-node bifurcations) and in other dynamical systems suffering shifts.
References
Nielsen, M. K. & Schreyer, H. L. Bifurcations in elastic-plastic materials. Int. J. of Solids Structures 30, 521–544 (1993).
Kahan, S. & Sicardi-Schifino, A. C. Homoclinic bifurcations in Chua’s circuit. Physica A 262, 144–152 (1999).
Ivanchenko, M. et al. Classical bifurcation diagrams by quantum means. Annalen der Physik 529, 1600402 (2017).
Rietkerk, M., Dekker, S. C., de Ruiter, P. C. & van de Koppel, J. Self-organized patchiness and catastrophic shifts in ecosystems. Science 305, 1926–1929 (2004).
Staver, A. C., Archibald, S. & Levin, S. A. Anticipating critical transitions. Science 334, 230–232 (2011).
Carpenter, S. R. et al. Early warnings of regime shifts: A whole ecosystem experiment. Science 332, 1079–1082 (2011).
May, R. M. & Levin, S. A. Complex systems: Ecology for bankers. Science 338, 344–348 (2008).
Lade, S. J., Tavoni, A., Levin, S. A. & Schlüter, M. Regime shifts in a socio-ecological system. Theor. Ecol. 6, 359–372 (2013).
Murray, J. D. Mathematical Biology: I. An Introduction. (Springer-Verlag, New York, 2002).
Ott, E. Chaos in Dynamical Systems. (Cambridge University Press, Cambridge, 2002).
Gil, L., Balzer, G., Coullet, P., Dubois, M. & Berge, P. Hopf bifurcation in a broken-parity pattern. Phys. Rev. Lett. 66, 3249–3255 (1991).
Trickey, S. T. & Virgin, L. N. Bottlenecking phenomenon near a saddle-node remnant in a Duffing oscillator. Phys. Lett. A 248, 185–190 (1998).
Das, M., Vaziri, A., Kudrolli, A. & Mahadevan, L. Curvature condensation and bifurcation in an elastic shell. Phys. Rev. Lett. 98, 014301 (2007).
Gomez, M., Moulton, D. E. & Vella, D. Critical slowing down in purely elastic ‘snap-through’ instabilities. Nature Phys. 13, 142–145 (2017).
Maselko, J. Determination of bifurcation in chemical systems. An experimental method. Chem. Phys. 67, 17–26 (1982).
Strizhak, P. & Menzinger, M. Slow-passage through a supercritical Hopf bifurcation: Time-delayed response in the Belousov-Zhabotinsky reaction in a batch reactor. J. Chem. Phys. 105, 10905 (1996).
Dai, L., Vorselen, D., Korolev, K. S. & Gore, J. Generic indicators of loss of resilience before a tipping point leading to population collapse. Science 336, 1175–1177 (2012).
Gu, H., Pan, B., Chen, G. & Duan, L. Biological experimental demonstration of bifurcations from bursting to spiking predicted by theoretical models. Nonlinear Dyn. 78, 391–407 (2014).
Teixeira, R. M. N. et al. Convergence towards asymptotic state in 1-d mappings: A scaling investigation. Phys. Lett. A 379(18), 1246–1250 (2015).
Strogatz, S. H. Nonlinear Dynamics and Chaos. (Perseus Books, Reading, 1994).
Stanley, H. E. Introduction to Phase Transitions and Critical Phenomena. (Oxford University Press, Oxford, 1973).
Yeomans, J. M. Statistical Mechanics of Phase Transitions. (Oxford University Press, New York, 1992).
Raju, A. et al. Renormalization group and normal form theory. ArXiv e-prints, 1706, 00137 (2017).
Marro, J. & Dickman, R. Nonequilibrium Phase Transitions in Lattice Models. Collection Alea-Saclay: Monographs and Texts in Statistical Physics (Cambridge University Press, 1999).
Muñoz, M. A. Colloquium: Criticality and dynamical scaling in living systems. ArXiv e-prints, 1712, 04499 (2017).
Barber, M. N. Finite-size scaling. In C. Domb & J. L. Lebowitz, editors, Phase Transitions and Critical Phenomena, Vol. 8, pages 145–266 (Academic Press, London, 1983).
Privman, V. Finite-size scaling theory. In V. Privman, editor, Finite Size Scaling and Numerical Simulation of Statistical Systems, pages 1–98 (World Scientific, Singapore, 1990).
Corral, A. & Font-Clos, F. Criticality and self-organization in branching processes: application to natural hazards. In M. Aschwanden, editor, Self-Organized Criticality Systems, pages 183–228 (Open Academic Press, Berlin, 2013).
Garcia-Millan, R., Font-Clos, F. & Corral, A. Finite-size scaling of survival probability in branching processes. Phys. Rev. E 91, 042122 (2015).
Corral, A., Garcia-Millan, R. & Font-Clos, F. Exact derivation of a finite-size scaling law and corrections to scaling in the geometric Galton-Watson process. PLoS One 11(9), e0161586 (2016).
Kuznetsov, Y. A. Elements of Applied Bifurcation Theory. 2nd edition, (Springer, New York, 1998).
Christensen, K. & Moloney, N. R. Complexity and Criticality. (Imperial College Press, London, 2005).
Agoritsas, E., Bustingorry, S., Lecomte, V., Schehr, G. & Giamarchi, T. Finite-temperature and finite-time scaling of the directed polymer free energy with respect to its geometrical fluctuations. Phys. Rev. E 86, 031144 (2012).
Scheffer, M. G. & Carpenter, S. R. Early warning signals for critical transitions. Nature 461, 53–59 (2009).
Scheffer, M., Carpenter, S., Foley, J. A., Folke, C. & Walker, B. Catastrophic shifts in ecosystems. Nature 413, 591–596 (2001).
Scheffer, M. G. & Carpenter, S. R. Catastrophic regime shifts in ecosystems: linking theory to observation. Trends Ecol. Evol. 18, 648–656 (2003).
Acknowledgements
We are very indebted to Matt Hennessy for his in-depth revision of the manuscript and to Jordi Garca-Ojalvo for clever suggestions. The research leading to these results has received funding from ‘la Caixa’ Foundation and from a MINECO grant awarded to the Barcelona Graduate School of Mathematics (BGSMath) under the ‘María de Maeztu’ Program (grant MDM-2014-0445). This work has also been funded by projects FIS2015-71851-P, MTM2014-52209-C2-1-P and MTM2017-86795-C3-1-P from the Spanish MINECO, from 2014SGR-1307 (AGAUR), and from the CERCA Programme of the Generalitat de Catalunya. Josep Sardanyés has been also funded by a Ramón y Cajal Fellowship (RYC-2017-22243).
Author information
Authors and Affiliations
Contributions
A.C. and L.A. performed the mathematical calculations. A.C., L.A. and J.S. carried out the numerical computations. All authors analysed and discussed the results. All authors reviewed the manuscript.
Corresponding authors
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Corral, Á., Sardanyés, J. & Alsedà, L. Finite-time scaling in local bifurcations. Sci Rep 8, 11783 (2018). https://doi.org/10.1038/s41598-018-30136-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-018-30136-y
This article is cited by
-
Universal constraint on nonlinear population dynamics
Communications Physics (2022)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
