
Abstract
Sample space reducing (SSR) processes offer a simple analytical way to understand the origin and ubiquity of power-laws in many path-dependent complex systems. SRR processes show a wide range of applications that range from fragmentation processes, language formation to search and cascading processes. Here we argue that they also offer a natural framework to understand stationary distributions of generic driven non-equilibrium systems that are composed of a driving- and a relaxing process. We show that the statistics of driven non-equilibrium systems can be derived from the understanding of the nature of the underlying driving process. For constant driving rates exact power-laws emerge with exponents that are related to the driving rate. If driving rates become state-dependent, or if they vary across the life-span of the process, the functional form of the state-dependence determines the statistics. Constant driving rates lead to exact power-laws, a linear state-dependence function yields exponential or Gamma distributions, a quadratic function produces the normal distribution. Logarithmic and power-law state dependence leads to log-normal and stretched exponential distribution functions, respectively. Also Weibull, Gompertz and Tsallis-Pareto distributions arise naturally from simple state-dependent driving rates. We discuss a simple physical example of consecutive elastic collisions that exactly represents a SSR process.
Similar content being viewed by others


Introduction
Many dissipative systems, driven non-equilibrium processes in particular, can be understood as a combination of driving and relaxation processes. The relaxation process is characterized by the dynamics that occurs when the system is not driven. It describes how the system progresses from “high” states (for example energy) towards “low” states. Without a driving process, the system reaches a stationary “sink” or attractor state from which it can no longer escape without a driving process. The driving process brings the system from low states to high states.
Typically, relaxation processes are sample space reducing (SSR) processes, meaning that as the system relaxes from higher to lower states, the number of possible accessible states reduces over time. In other words, when the system is in a high state, there are many lower lying states it can reach. When the system is in a low state, it can only reach those few states that are even lower. In this sense, the sample space of the relaxing process reduces as the process unfolds. When the process is lifted from lower to higher states by a driving process, the sample space typically increases.
Recently, it was shown that SSR processes exhibit a non-trivial statistical behavior1 that allows us to understand the origin and ubiquity of power-laws in many dynamical, path-dependent phenomena. Examples for SSR processes range from language formation and fragmentation processes1,2 to diffusion- and search processes on networks3 to cascading processes4. SSR processes offer an alternative route to understand power-laws; they complement the classic ways of criticality5, self-organized criticality6,7, multiplicative processes with constraints8,9,10, and preferential processes11,12,13.
In their simplest form, SSR processes can be depicted as a combination of a relaxing process with a simple driving process. For the relaxation process, imagine a ball bounces down a staircase, like the one shown in Fig. 1a. Each state i of the system corresponds to one particular stair. The ball is initially (t = 0) placed at the topmost stair (highest state N + 1 = 10). In the next timestep it can jump downward randomly to any of the N lower stairs, i = 1, 2, …, N. The probability to hit a particular step i is qi = 1/N. Assume that at time t = 1 the ball landed at step k. Since it can only jump to stairs k′ that are below k, the probability to jump to any stair k′ < k in the next timestep is 1/(k − 1). The process continues until eventually stair 1 is reached; then it halts. At this point, the driving process sets in and the process is restarted by placing the ball at state N + 1 and running a new downward relaxation sequence. The process can be seen as a generic relaxation process, with a very low driving rate that is much slower than the relaxation process. In this case the frequency of visits to each state k follows an exact power-law p(k) ∝ k−α, with the exponent α = 1, i.e., Zipf’s law1. The existence of Zipf’s-law is extremely robust and does not depend on the details of the system. It appears as a robust attractor, which emerges for a large variety of prior distributions qi3. This means that even for non-uniform prior probabilities qi (which can be interpreted as the width of a stair i in the SSR process, see Fig. 1c), the visiting statistics follows Zipf’s law. The fact that the power-law is an attractor distribution might explain its ubiquity, in a similar way as the central limit theorem explains the ubiquity of the normal distribution in situations with non-varying sample spaces.

(a) Slowly driven SSR process: relaxation part: a ball bounces downwards a staircase with N = 10 stairs (states). At each timestep the ball randomly choses one of the stairs below its current position. In this picture the prior probability of each stair is considered uniform, qi = 1/N. Driving part: once the ball reaches the lowest step, it is restarted (placed at the highest step N, from which it immediately jumps a random step downward–effectively restarting places it at any of the N states.) The result is Zipf’s law in state visits, p(k) ~ k−1. (b) SSR process with driving: at each step, with probability 1 − λ (driving rate) the ball is restarted, which results in exact power-laws, p(k) ~ k−λ. In the more general setting studied in this paper, driving rates may vary from state to state. In the figure the state is k = 4, and the local driving rate is 1 − λ(k). (c) One can assign weights –or prior probabilities qi– to each state i. These are represented by different widths of the steps. For slow driving, many choices of prior probabilities the histogram of visits to each state shows a perfect Zipf’s law, i.e., p(k) ~ k−1. (d) Whenever λ > 1 we adopt the “cascading picture”, where, whenever a ball hits a state i, it multiplies and creates λ(i) − 1 new balls, that start their downward moves independently. For constant λ(i) = α we get exact power-law distributions, p(k) ∝ k−α, with 0 ≤ α < ∞4.
The power-law exponent can be controlled if the driving rate is increased. If the process is restarted1 Footnote 1with probability 1 − λ from any of its current states, the distribution function becomes p(k) ∝ k−λ 1. We call r = 1 − λ the driving rate. Intuitively this means if we interrupt the relaxation process with a restarting (driving) event, (that brings the system to its highest state N) the exponent of the corresponding distribution function of states is 1 − r = λ. This situation is shown in Fig. 1b. The case of λ = 1 represents the slow driving rate limit mentioned before, where the process reaches its lowest state before the restart. λ = 0 represents a pure Bernoulli process, since we restart after every step (random walk on the states 1, 2, …, N − 1).
In this picture, λ can take any value from 1 (slow driving) to 0 (driving at every step). Mathematically there is no need to limit the range of λ at 1, even though for λ > 1 the intuitive picture of the driving rate has to be adjusted. However, one can easily interpret a negative driving rate r with a cascading SSR processes that is shown in Fig. 1d 4. Here λ is interpreted as a multiplier that–whenever a ball reaches a state i – creates λ − 1 new balls that all sit at state i. In the next timestep all of these λ balls will now enter the relaxation dynamics (bouncing downward in the described fashion), creating a cascade of balls during their downward trajectories, Fig. 1d. We will use the term “cascading” picture instead of the driving rate picture whenever λ > 1. A negative driving rate means that new random walkers are added at every step with a rate λ. For details see4. These cascading processes show exact power-law distributions p(k) ~ k−λ for 0 ≤ λ < ∞2.Footnote 2
In summary, if the driving rate is zero, meaning that the system reaches a sink state before it is lifted to higher states by the driving event, Zipf’s law emerges as a robust attractor for the state visit distributions. For larger driving rates we obtain exact power-laws, where the exponent is λ = 1 − r. This also holds for “negative driving rates”, where λ corresponds to the production rate of new elements that follow the SSR dynamics.
Here we will argue that any driven system, for which the relaxing component is sample space reducing, the details of the driving component of the system determine the statistics of the state visiting frequencies of the driven system. We discuss the case where the driving rate depends locally on the state of the system: 1 − λ(k) becomes the driving rate (restarting probability) of the process when at state k. We show that with particularly simple choices of a state-dependent driving rate 1 − λ(k), practically all classical visiting distributions p(k) can be obtained, including the exponential, normal, Zipf, exact power-law, log-normal, Gamma, Weibull, Gompertz, Tsallis, and power-law with exponential cut-off distributions. This view offers a simple generic route to understand stationary distributions of driven non-equilibrium systems as a consequence of local or temporal variations of driving rates within a system. In other words, if the details of a driving process are understood, stationary distributions of driven systems can be predicted. We discuss the relation of these results with a recently proposed way to understand various stationary distributions on the basis of random growth models14.
Sample Space Reducing Relaxing Processes with State-Dependent Driving
Assume a stochastic sample space reducing process over N states with a prior distribution given by any choice of qi > 0, with \({\sum }_{i=1}^{N}{q}_{i}=1\). If the driving rate is explicitly state-dependent, 1 − λ(k) denotes the probability that the process is restarted (driven) whenever it is in state k. Let us assume that for all states, 0 < λ(k) < 1. The transition probabilities from state k to state i read,
where g(k) is the cumulative distribution of qi, \(g(k)={\sum }_{i\le k}{q}_{i}\). After many restarting events of the relaxing process, one can safely assume the existence of a stationary distribution pλ,q, that depends on the priors and the driving rate. It can be explicitly computed by observing that,
We obtain, \({p}_{\lambda ,q}(i)=\frac{{q}_{i}}{{Z}_{\lambda ,q}}{\prod }_{1 < j\le i}{(1+\lambda (j)\frac{{q}_{j}}{g(j-1)})}^{-1}\), where Zλ,q is the normalisation constant. This equation can be well approximated by,
If there is a continuum of states, the continuum version of Eq. (3) is,
Equations (3) and (4) also hold for cascading SSR processes, for which λ(k) > 1 plays the role of a state-dependent multiplication rate. The case λ(x) = 1 for all x, we call a slowly driven SSR process. Note, that the framework also holds for processes, where not all transitions from all higher to all lower states are allowed, but where some are forbidden. For constant λ, this case corresponds to diffusion processes on directed acyclic graphs (targeted diffusion)3. For state- (node-) dependent λ(x) ≤ 1 on networks, the results derived above hold in the limit of large graphs, where q corresponds to the degree sequence. The case λ(x) > 1, corresponds to a node-specific multiplication (creation) rate of random walkers, whenever a node is visited.
Particular solutions for state-dependent driving
For simplicity, and without loss of generality, in the following we consider the continuous case, for which we assume that the SSR process is defined on the continuous interval x ∈ [1, N]. We first discuss the case of uniform prior distributions, q(x) = 1/N. To see the relation between the stationary distribution of a process and its driving function λ(x), we differentiate Eq. (4) and get
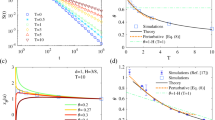
Now we use Eq. (5) to compute λ(x) for any reasonable distribution function. We present just a few examples, which we summarize in Table 1. Numerical analysis for several driven processes with specific state-dependent driving functions are shown in Fig. 2, showing perfect agreement with the theoretical predictions.

Several classic probability distributions obtained from numerical realisations (circles) of SSR processes over N = 500 states, choosing particular state-dependent driving rates λ(x) functions and uniform prior distribution q. Dashed lines represent the prediction from Eq. (5). Results are averages over 50 times 1000 restarts of the process. Errorbars are generally less than symbol size. (a) For constant λ(x) = α we obtain exact power-law distributions p(x) ∝ x−α (α = 1.5). In this case, since α > 1, we have a cascading SSR. (b) λ(x) = βx leads to an exponential distribution p(x) ∝ e−βx (β = 0.00205). (c) λ(x) = βxα leads to a stretched exponential \(p(x)\propto {e}^{-\frac{\beta }{\alpha }{x}^{\alpha }}\) (α = 2, β = 4.1E − 06). Note that α = 2 corresponds to a normal distribution. (d) λ = 1 − α + βx yields a Gamma distribution p(x) ∝ xα−1e−βx (α = 0.25, β = 0.0015).
Power-laws.
is obtained with \(\lambda (x)=-\,x\frac{d}{dx}[\,-\,\alpha \,\mathrm{log}\,x]=\alpha \). The fact that a state-independent driving leads to exact power-laws was found in1. Distributions for state-independent driving are compared with simulations in Fig. 2a.
Exponential distribution.
is obtained with \(\lambda (x)=-\,x\frac{d}{dx}[-\,\beta x]=\beta x\). Note that for λ < 1, β ≤ 1/N, in the “cascading picture” there is no such upper limit. Results from simulated SSR processes with this state-dependent noise are shown in Fig. 2b.
Stretched exponential and normal distribution.
is obtained with \(\lambda (x)=-\,x\frac{d}{dx}[-\frac{\beta }{\alpha }{x}^{\alpha }]=\beta {x}^{\alpha }\). α = 2 corresponds to the normal distribution. Again, λ < 1 implies β ≤ N−α, while in the “cascading picture” no such limitation exits, see Fig. 2c.
Gamma distribution.
is obtained with \(\lambda (x)=-\,x\frac{d}{dx}[(\alpha -1)\,\mathrm{log}\,x-\beta x]=1-\alpha +\beta x\). Obviously, α − 1 ≤ β is required. See Fig. 2d.
Log-normal distribution.
is obtained with \(\lambda (x)=-\,x\frac{d}{dx}[-\mathrm{log}\,x-\frac{{(\mathrm{log}x-\beta )}^{2}}{2{\sigma }^{2}}]=1+\frac{\mathrm{log}\,x}{{\sigma }^{2}}-\frac{\beta }{{\sigma }^{2}}\). For λ < 1 we require log N ≤ β ≤ σ2.
Power-law with exponential cut-off.
is obtained with \(\lambda (x)=-\,x\frac{d}{dx}[\,-\,\alpha \,\mathrm{log}\,x-\beta x]=\alpha +\beta x\). Here λ < 1 implies the restrictions β ≤ (1 − α)/N and α ≤ 1.
Tsallis-Pareto or q-exponential distribution.
is obtained with \(\lambda (x)=-\,x\frac{d}{dx}[\frac{1}{1-Q}\,\mathrm{log}\,(1-(1-Q)\beta x)]=\frac{\beta x}{1-\beta x(1-Q)}\). Note that for for q-exponentials with Q < 1 we require βx < 1/(1 − Q), while for Q > 1 no such restriction exists. For λ < 1 we also require, (2 − Q)β ≤ 1/N, which for Q > 2 is always satisfied.
Weibull distribution.
is obtained with \(\lambda (x)=-\,x\frac{d}{dx}[(\alpha -1)\,\mathrm{log}\,x-{(\beta x)}^{\alpha }]=1-\alpha +\alpha {(\beta x)}^{\alpha }\). Note that the standard parametrization of the Weibull distribution uses the parameter ν = 1/β instead of β. To ensure positivity of λ this implies that \(\frac{\alpha -1}{\alpha }\le {\beta }^{\alpha }\), which is always satisfied for α < 1. For α > 1 we need \(\beta \le {(1-\frac{1}{\alpha })}^{\frac{1}{\alpha }}\), for α < 1 we require β ≤ 1/N.Gompertz distribution.
is obtained with \(\lambda (x)=-\,x\frac{d}{dx}[\beta x-\eta {e}^{\beta x}]=(\eta {e}^{\beta x}-1)\beta x\). The restriction e−β ≤ η applies; we further require \(\eta \le (\frac{1}{\beta }+1){e}^{-\beta }\).
Non-uniform prior distributions
In general, for the case in which both, λ and q are functions of the state x, a unique relation between driving and distribution functions is hard or even impossible to find. However, some cases can be explored. As an example we show the situation for the specific driving function, λ(x) = βg(x). Using Eq. (4) we have,
Taking the derivative we get,
which has the general solution,
where c > 1 is a constant and Pλ,q is the cumulative distribution associated to Pλ,q. Once Pλ,q and λ(x) (which is equivalent to the cumulative g(x), up to a constant β) are specified, q(x) is computed through Eq. (16).
A Physical Example
Repeated elastic collisions of spherical projectiles with targets of identical masses in three dimensional space are an exact example for a continuous “staircase process” with uniform priors3Footnote 3. Assume a simple experiment in which projectiles are fired into a container that consists of D layers of targets. A projectile might be an atom and the container is a foil with D layers of target atoms.
Every time the projectile collides elastically with a target (in rest), it transfers some of its kinetic energy to the target. In sequences of collisions the projectile’s kinetic energy reduces after every collision and follows a SSR dynamics. The transition probability density to find the projectile with energy E′ after a collision, given that it entered the collision with energy E, is
where θ is the Heaviside step-function, see appendix A. This reminds us immediately of Eq. (1), for λ = 1, and qi uniform. Let pc denote the collision probability that a projectile, while passing through a layer, collides with a target, then on average a projectile will encounter pcD collisions on its path through the foil. An SSR process with r = 1 − λ, where r is the driving rate, will on average perform (1 − r)/r SSR steps before it leaves the foil and a new projectile is fired (restart). We identify pcD ~ (1 − r)/r and get r ~ 1/(1 + pcD). If pc is a constant, the empirical distribution of projectile kinetic energies sampled after collisions on their path through the target is described by
This implies that for thick foils (D → ∞) we get Zipf’s law with λ ~ 1. Note that we do not take travel times between layers into account. In many elastic collision experiments, such as neutron scattering, the collision probability pc = pc(E) is energy-dependent due to energy-dependent cross-sections. In these cases λ(E) is a state (i.e. energy)-dependent property of the process. As a consequence, the observable distribution functions after multiple collisions will follow our central result in Eq. (4).
Note that the power-law in Eq. (18) directly translates to the well-known exponential energy profiles in absorbing media. The expectation values of the projectile’s energies En after the n’th subsequent collision indeed follow an exponential,
where E0 is the initial kinetic energy of projectiles, see appendix B. For uniform priors one gets β = log2, i.e. exp (−β) = 1/2. In our thought experiment with a constant collision probability pc, a projectile that has traveled a distance d (0 ≤ d ≤ D) through the container has undergone N ~ pcd collisions, and the average projectile energy is, \(\langle E(d)\rangle ={E}_{0}{e}^{-\beta {p}_{c}d}\). This exponential law also reminds us of the Lambert-Beer law that describes the loss of intensity of radiation traveling through an absorbing medium. For the Lambert-Beer law we may conversely conclude that the intensity distribution of radiation itself follows a power-law with an exponent depending on the absorption coefficient and the thickness D of the absorbing medium. Moreover, in inhomogeneous media varying absorption coefficients again allow the parameter λ of the process to become state-dependent.
Discussion
Driven non-equilibrium systems are often composed of a driving process and a relaxing process. The later is characterized by transitions from “higher” states to “lower” states, and is often a sample space reducing process. SSR processes with simple driving processes have been shown to be analytically solvable. They exhibit non-Gaussian statistics that is often encountered in driven complex systems. In particular SSR processes offer an alternative route to understand the origin of power-laws. Here we showed that SSR processes exhibit a much wider range of statistical diversity if the driving process becomes non-trivial. Assuming that driving rates may vary with the current state of the system, we demonstrated that practically any distribution function can be naturally associated with state-dependent driving processes. The functional form of the driving function can be extremely simple. Constant driving leads to exact power-laws, a linear driving function λ(x) gives exponential or Gamma distributions, a quadratic function yields the normal distribution. Also the Weibull and Gompertz distributions arise as a consequence from relatively simple driving functions. It is well known how noise and drift parameters can be defined in standard stochastic processes to derive specific stationary distributions. In this sense, note that Eq. (4) is also the solution of a general family of stochastic differential equation15, where the drift and noise terms are defined in terms of q, g and λ in the following way,
where dW defines a Wiener process. The relation between standard stochastic equations and driven SSR process with general state-dependent noise is purely formal. The underlying Wiener process is qualitatively different from the microscopic dynamics of a relaxing SSR processes. In driven SSR processes there is a straightforward and clear interpretation of all parameters involved.
More interesting than this formal correspondence to stochastic processes, is the relation of the state-dependent driven processes with sustained random growth models (SRG)14. Similar to driven SSR processes, SRG processes also cover a wide range of real-world applications. These are processes, where random walkers run through a directed chain of states. The transition rate from one state n to the next state n + 1 is labelled by μn. At every state there is a probability γn that the walker leaves the chain and disappears. The process is sustained by a constant inflow of walkers to the first state. A remarkable feature of this system is that it exhibits stationary distributions of the form,
where Zμ,γ is the normalisation constant. Equation (21) has a similar structure to Eq. (4). Indeed one can map one-to-one λ(x) and q(x) of the driven SSR to μ(x) and γ(x) of the SRG process. By specifying specific relations between μ and γ, the SRG allows us to derive a large variety of distribution functions. In particular, the mapping can be obtained by setting \(\lambda (x)=\gamma (x){\int }_{1}^{x}\frac{dy}{\mu (y)}\) and \(q(x)={(\mu (x){\int }_{1}^{N}\frac{dy}{\mu (y)})}^{-1}\). The reverse relation is given by \(\mu (x)=\frac{{Z}_{\mu ,\gamma }}{{Z}_{\lambda ,q}}\frac{1}{q(x)}\) and \(\gamma (x)=\frac{{Z}_{\lambda ,q}}{{Z}_{\mu ,\gamma }}\frac{\lambda (x)}{g(x)}\). For constant driving, the SRG parameters μ(x) and γ(x) are the inverse of q(x) and g(x), respectively. Accordingly, the existence of this mapping enables us to relate a sampling process on a collapsing sample space (driven SSR processes) with a stochastic process that runs in the opposite direction (SRG) and populates more states as it unfolds. We demonstrated that SSR processes occur not only in complex systems but already in simple consecutive elastic collision experiments. Collisions in materials with energy-dependent cross sections exactly correspond to our main result of how state-dependent λ correspond to observable distribution functions.
Notes
1Think of the restarting process as a process, where the ball is brought to a state N + 1, from which it immediately jumps to any other state, 1, 2, …, N.
2For the case of non-uniform priors the situation becomes slightly more involved; the visiting distribution becomes, \(p(k)\sim {q}_{k}/{({\sum }_{j=1}^{k}{q}_{j})}^{\lambda }\), see3.
3Except for minor technicalities, SSR processes on continuous sample spaces behave exactly as discrete SSR processes.
References
Corominas-Murtra, B., Hanel, R. & Thurner, S. Understanding scaling through history-dependent processes with collapsing sample space. Proc. Nat. Acad. Sci. 112, 5348–5353 (2015).
Thurner, S., Hanel, R., Liu, B. & Corominas-Murtra, B. Understanding Zipf’s law of word frequencies through sample-space collapse in sentence formation. J. Roy. Soc. Interface 12, 20150330 (2015).
Corominas-Murtra, B., Hanel, R. & Thurner, S. Extreme robustness of scaling in sample space reducing processes explains Zipf’s law in diffusion on directed networks. New J. Phys 18, 093010 (2016).
Corominas-Murtra, B., Hanel, R. & Thurner, S. Sample space reducing cascading processes produce the full spectrum of scaling exponents. Scientific Reports 7, 11223 (2017).
Stanley, H. E. Phase transitions and critical phenomena (Clarendon Press, 1971).
Bak, P., Tang, C. & Wiesenfeld, K. Self-organized criticality: An explanation of the 1/f noise. Phys. Rev. Lett. 59, 381 (1987).
Jensen, H. J. Self-organized criticality: emergent complex behavior in physical and biological systems. (Cambridge University Press, 1998).
Gabaix, X. Zipf’s law for cities: an explanation. Quarterly J. Econ. 114, 739–767 (1999).
Saichev, A. I., Malevergne, Y. & Sornette, D. Theory of Zipf’s law and beyond. Springer (2009).
Malevergne, Y., Saichev, A. & Sornette, D. Zipf’s law and maximum sustainable growth. J. Econ. Dynamics and Control 37, 1195–1212 (2013).
Yule, G. U. A mathematical theory of evolution, based on the conclusions of Dr. J. C. Willis. Phil. Trans. Roy. Soc. 213, 21–87 (1925).
Simon, H. A. On a class of skew distribution functions. Biometrika 42, 425–440 (1955).
Barabasi, A.-L. & Albert, R. Emergence of scaling in random networks. Science 286, 509 (1999).
Biró, T. S. & Néda, Z. Dynamical stationarity as a result of sustained random growth. Phys. Rev. E 95, 032130 (2017).
Van Kampen, N. G. Stochastic Processes in Physics and Chemistry (Elsevier Science, 1992).
Acknowledgements
We acknowledge support from Austrian Science Foundation, under FWF projects P29032 and P29252.
Author information
Authors and Affiliations
Contributions
B.C.-M., R.H., L.Z. and S.T. contributed equally to conceive and design the experiments, develop mathematical models, perform numerical experiments and write the paper.
Corresponding author
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
Elastic collisions as an SSR processes
Consider an elastic collision of two particles of mass m (projectile) and M (target) with respective radii r and R. In the center of mass system the projectile and target have initial velocities u and v, respectively. Momentum conservation implies v = −um/M. We assume that both particles move along the x axis of the center of mass coordinate system. After the collision, both particles move along with the same velocities but their directions may have changed by an angle ϕ, i.e. \(u^{\prime} =-\,u(\cos \,(\varphi ),\,\sin (\varphi ))\) and \(v^{\prime} =-\,v(\cos (\varphi ),\,\sin (\varphi ))\). The velocities of the particles in the laboratory coordinate system, where the target particle with mass M is in rest before the collision, one finds v0 = 0. It follows that u0 = u − v = u(1 + m/M). Moreover, after the collision, \({v}_{1}=v^{\prime} -v(1,0)=\) \(u(\cos (\varphi )+1,\,\sin (\varphi ))m/M\) and \({u}_{1}=u^{\prime} -v(1,0)=u(m/M-\,\cos (\varphi ),-\,\sin (\varphi ))\). If the projectile moves at speed u0 before the collision, then after the collision it moves at speed \({u}_{1}={u}_{0}(m/M-\,\cos (\varphi ),-\,\sin (\varphi ))/(1+m/M)\). The kinetic energy of this particle before the collision is |u0|2 = 2E0/m and after the collision \(|{u}_{1}^{2}|=2{E}_{1}/m=(2{E}_{0}/m)({(m/M)}^{2}-\) \(2m/M\,\cos \,(\varphi )+1)/{(1+m/M)}^{2}\). It follows that
with \(\mu =\frac{{(M+m)}^{2}}{mM}\) and
Clearly, E1 may take values in the interval [qE0, E0], where \(q=1-\mathrm{4/}\mu ={(\frac{M-m}{M+m})}^{2}\). For m = M, q = 0 and E1 ∈ [0, E0].
Transition probabilities in three dimensions
Defining again Rc = R + r one gets that if a projectile hits the target at a distance x off their centers, 0 < x < Rc, is \({\rho }_{x}(x)=2x/{R}_{c}^{2}\), i.e. \({P}_{x}([x,x+dx])={\rho }_{x}(x)dx=2xdx/{R}_{c}^{2}\). The tangential angle α between the colliding particle is cos (α) = xRc; and the reflection angle is ϕ = 2α. As a consequence x = Rc cos (ϕ/2) and dx = −Rc sin (ϕ/2)/2 dϕ. From \({P}_{\varphi }([\varphi ,\varphi +d\varphi ])={\rho }_{\varphi }(\varphi )d\varphi =-\,{\rho }_{x}(x)dx={P}_{x}([x+dx,x])\) we get
From \({\rho }_{\varphi }(\varphi )d\varphi =\rho ({E}_{1}(\varphi )|{E}_{0})d{E}_{1}(\varphi )\) and Eq. (A2), we get
We see that the transition probabilities in E for elastic collisions and M = m follow exactly the typical SSR dynamics.
Appendix B
Zipf and exponential distribution functions
For (continuous) SSR processes, where prior weights of the process are given by a power-law q(E) ∝ Eα with exponent α > −1, the energy expectation values 〈En〉 of the projectile energies En after the n’th SSR move, decay exponentially. To see this we define the cumulative distribution \(Q(E)={\int }_{0}^{E}dE^{\prime} q(E)\) and for simplicity we first show the case for α = 0,
For α > −1 the computation follows exactly the same logic, and we get \(\langle {E}_{n+1}\rangle =\frac{\alpha +1}{\alpha +2}\langle {E}_{n}\rangle \). As a consequence one finds that
with β = log(2 + α) − log(1 + α). To translate the n’th collision into a penetration depth d = 1, 2, …, D, for a constant pc, just use n = pcd in Eq. (B2).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Corominas-Murtra, B., Hanel, R., Zavojanni, L. et al. How driving rates determine the statistics of driven non-equilibrium systems with stationary distributions. Sci Rep 8, 10837 (2018). https://doi.org/10.1038/s41598-018-28962-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-018-28962-1
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
