
Abstract
Using the Ermakov-Lewis invariants appearing in KvN mechanics, the time-dependent frequency harmonic oscillator is studied. The analysis builds upon the operational dynamical model, from which it is possible to infer quantum or classical dynamics; thus, the mathematical structure governing the evolution will be the same in both cases. The Liouville operator associated with the time-dependent frequency harmonic oscillator can be transformed using an Ermakov-Lewis invariant, which is also time dependent and commutes with itself at any time. Finally, because the solution of the Ermakov equation is involved in the evolution of the classical state vector, we explore some analytical and numerical solutions.
Similar content being viewed by others
Introduction
In 1931, Koopman and von Neumann (KvN) formulated a way to get the realm of classical mechanics in terms of operators and state vectors over a Hilbert space1,2. The development of KvN mechanics provides an operational language that is intimately linked to quantum theory, and in this approach the dynamics in phase space is determined by the probability distribution function Γ(x, p; t), which is the square module of the classical wave functions ψ(x, p; t) (or KvN wave functions)3,4,5,6,7.
The operational language in KvN mechanics, that underlines a Hilbert space of complex and square integrable functions, has been used to obtain a new approach and reformulation of classical and quantum theories8,9,10,11,12,13,14,15. Also in this sense, a hybrid mechanics has been proposed, where one can infer classical and quantum dynamics of statistical ensembles of a single particle in one dimension, which is denoted as operational dynamic modelling16. In this theoretical framework, the phase space plays a fundamental role in the description and interpretation of quantum, classical and hybrid phenomena, encompassing open and closed systems17,18,19,20,21.
It is well known that the harmonic oscillator is one of the more (if not the most) studied physical model in physics and the time-dependent parameter (mass and frequency) cases arise as an useful extension for explaining dynamical phenomena. The classical and quantum harmonic oscillator has been studied with time dependent mass and frequency22,23,24,25,26,27,28, and in particular a method of exact invariants has been used to give a solution29,30,31,32. There exist many physical systems where it is possible to find the time-dependent frequency harmonic oscillator, such as ions on Paul traps oscillating in one dimension with time dependent frequency33,34,35,36, radiation fields that propagate in time dependent dielectric media37, etc.
Lewis and Reisenfeld were the first to use invariant methods to solve Schrödinger equation for a time-dependent frequency harmonic oscillator23,24, and more recently this approach has been used, in conjunction with squeeze transformations, in the Ermakov equation to get a closed solution31,32. The use of KvN mechanics and operational dynamic modelling applied to statistical copies that behave like a time-dependent frequency harmonic oscillator, provide an operational treatment where the invariants method can be used. In this article, we use the operative language of operational dynamic modelling in order to use the invariants method to solve a Schrödinger-like equation, where the Hamiltonian is replaced by the Liouvillian.
KvN Mechanics
In this Section, we summarize some basic concepts of the KvN mechanics. Concepts that are intimately related to quantum theory, such as Hilbert space, state vectors and operators; for state vectors and operators we use Dirac notation, thus they are denoted by \( {\mathcal H} \) and 〈bra|ket〉, respectively.
In every theory dealing with the statistical properties of a system, finding the probability density function Γ(x, p; t) is the main goal; thus, our first requirement is the acquisition of the density operator \(\hat{{\bf{P}}}\) at time t. In the abstract approach of KvN mechanics, we have the following postulates:
-
The system is defined by a state vector |ψ〉 that belongs to a Hilbert space \( {\mathcal H} \); we ask the state vector to be normalized, so
$$\langle \psi |\psi \rangle =1.$$(1) -
The expected value at time t of an observable \(\hat{O}\) is \(\langle \psi (t)|\hat{O}|\psi (t)\rangle \).
-
The probability that at time t the measurement of an observable \(\hat{O}\) yields O is \(|\langle \hat{O}|\psi (t)\rangle {|}^{2}\).
As consequence of Stone’s theorem38, the equation that describes the evolution of the state vector |ψ(t)〉 is
where the operator \(\hat{L}\) can be recognized as the Liouvillian or Hamiltonian according to the commutation relation between the position and momentum operators16.
The probability distribution function Γ(x, p; t) is given by Γ(x, p; t) = |〈x, p|ψ(t)〉|2, and the eigenstates of the position and momentum operators form an orthonormal and complete set, according to
since classically position and momentum operators commute \([\hat{x},\hat{p}]=0\).
Once we accept and recognize these postulates, we can find the explicit form of the operator \(\hat{L}\). For this task, in the framework of the Ehrenfest theorem39, we assume multiple copies of a single particle subjected to a potential \(U(\hat{x};t)\), next we apply the postulates mentioned above to this statistical set and we get the following system of equations
where we have considered an isolated system and m = 1. Therefore, applying the eq. (2) to the previous equations, we get the commutation relations
But in classical mechanics the position and momentum operators can be measured with arbitrary precision; i.e., \([\hat{x},\hat{p}]=0\), and the operator \(\hat{L}\) can not be a function only of \(\hat{x}\) and \(\hat{p}\). This implies that it is necessary to stick to it a pair of operators that satisfy the following commutation rules
which leads to the explicit form of the operator \(\hat{L}\),
As we postulated above, the probability distribution function is Γ(x, p; t) = 〈|x, p|ψ(t)〉|2 and to find the dynamics associated with it, it is necessary to use eqs (2) and (7), and project onto an orthonormal and complete set of vectors x, p, in such a way that we obtain
where
The relation (8) is the Liouville equation of classical statistical mechanics, which provides the evolution of Γ(x, p; t) in phase space. It is worth to remark that the addition of an arbitrary function of position and momentum operators, \(f(\hat{x},\hat{p})\), to the right hand side of eq. (7) does not affect the obtained equation of motion, eq. (8); in other words, there is an invariance in the KvN theory similar to a gauge invariance. This freedom in the theory has been used recently to model a quantum-classical hybrid40.
It is also important to mention that this conceptual development, altogether with the previous postulates, is known as operational dynamical modelling. In this way, we can infer classical and quantum dynamics; moreover, it is possible to find their unification16,17.
Invariant of the Time-Dependent Frequency Harmonic Oscillator in Kvn Mechanics
Let us consider a set of identical copies of a single particle subject to a time dependent quadratic potential, which leads to a time- dependent frequency harmonic oscillator in KvN mechanics with potential \(U(\hat{x};t)=k(t){\hat{x}}^{2}/2\). Under these considerations eq. (2) can be written as
where it is evident that the Liouvillian \(\hat{L}\) depends on time. However, it is possible to show that the above equation has an invariant of the form (see Appendix A)
where ρ obeys the Ermakov equation
It is important to mention that there is a symbiotic relationship with the solution of the time-dependent frequency harmonic oscillator differential equation
because we can relate u(t) and ρ(t) as follows
where
with y = ρ, u.
It is important to remark that the operators \({\hat{\lambda }}_{x}\) and \({\hat{\lambda }}_{p}\) are not associated with any physical observable, since all the observables of a classical system are represented by commuting operators, and this makes it impossible to measure (or observe) the invariant given by the eq. (11). It is also worth to notice that the obtained invariant, eq. (11), depends on the auxiliary unobserved operators \({\hat{\lambda }}_{x}\) and \({\hat{\lambda }}_{p}\), and that implies that the invariant is sensitive to the phase of the KvN wave function. In our case, the choice we have made is eq. (7); i.e., the function \(f(\hat{x},\hat{p})\) that can be arbitrarily added to the right hand side of eq. (7) has been taken as zero.
We can move to a scenario determined by the following unitary transformations
where eq. (10) can be written as
being \({\rm{\Psi }}(x,p;t)={\hat{T}}_{2}(t){\hat{T}}_{1}(t)\psi (x,p;t)\). Hence, the solution in the original framework is
with
Therefore, the classical wave function will be given by (see Appendix B)
where
being \({\rho }_{0}\) and \({\dot{\rho }}_{0}\) the initial conditions of the Ermakov equation.
Equation (17) contains a Liouville operator, that although depends on time, commutes with itself at any time t; i.e., the Liouville operator is diagonalizable. On the other hand, as along as there is a solution of the Ermakov eq. (12), expression (18) can be used to calculate any observable of the system.
Hyperbolically and quadratically growing frequency
The solution of the Ermakov equation and the time-dependent frequency harmonic oscillator are intimately connected, as eq. (14) shows. As an explicit example, we consider the time dependent frequency \(k(t)=2{\beta }^{2}/{\cosh }^{2}(\beta t)\), and as immediate consequence of eq. (14), we get the solutions
On the other hand, it is very easy to show the function ω ρ (0, t) contained in the state vector (18) complies with
Another example, where it is possible to find analytic relationships, is the one with frequency k(t) = 1/(γ + 2t)2. Following the recipe shown above, we can find that
and following the relationship (23), we can find also ω ρ (0, t).
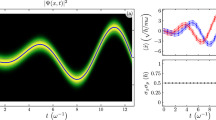
Finally, the evolution in phase space of the probability density function ρ(x, p; t) can be calculated using (20 and 21). In Fig. (1), we show the solution of the Ermakov equation, its derivative, ω ρ (0, t) and the evolution of the centre of mass in phase space.

We show the time evolution of the solution to the Ermakov equation ρ(t), its derivative and ω ρ (0, t), respectively, for different values of β. While the 3D graphic shows the time evolution of the mass centre in phase space, where x c (0) = −3 and p c (0) = 3 are the position and momentum of the mass centre at time t = 0. All variables and constants are in arbitrary units.
Oscillatory frequency
To conclude this Section we will approach a case that, although it does not have an analytical solution, represents perhaps a more real situation for the time-dependent frequency. The frequency to be considered is
To obtain the numerical solution we use the Runge-Kutta method41. Using the Ermakov equation and defining \({x}_{1}(t)=\rho (t)\), \({x}_{2}(t)=\dot{\rho }(t)\) and \({x}_{3}(t)=\int dt/{\rho }^{2}(t)\), we get the system of equations
where \(\rho \mathrm{(0)}=1\) and \(\dot{\rho }\mathrm{(0)}=0\). In Fig. (2), we show the numerical solution of the functions that appear in the state vector (20) and the evolution of centre mass in phase space.

We show the time evolution of the numerical solution of the Ermakov equation ρ(t), its derivative and ω ρ (0, t), with ω = 2.5 and Δ = 1/2. While the 3D graphic shows the time evolution of the mass centre in phase space, where x c (0) = 2 and p c (0) = 2 are the position and momentum of the mass centre at time t = 0. All variables and constants are in arbitrary units.
Conclusions
We show that the unification of quantum and classical arguments for dealing with time dependent systems is not only possible, but acquires a simple form with the KvN treatment. The existence of an invariant is always warranted when the Ermakov-Lewis equation is fulfilled for some state vector. Because the operational dynamical modelling is constructed based on the hard-stone theorem of Liouvillan theory in phase space, the representation of the system dynamics turns on a problem easily solved (analytically or numerically) in the position and momentum coordinates over a set of time.
As proved in the examples, when a carefully selected time varying frequency is taken, all the dynamical variables associated with the evolution of the system have a simpler and closed form. From \(\rho (t)\) and \(\dot{\rho }(t)\) we learned, in the case of subsection Hyperbolically and quadratically growing frequency, that monotonic growing or steady state development can be achieved, while the other case, that of subsection Oscillatory frequency, shows that oscillatory evolution is obtained. In either case, \({\omega }_{\rho }\mathrm{(0,}\,t)\) tends to grow.
Appendix A
In general, a Hermitian operator is called invariant if it satisfies the following relationship
where
In the case of a time-dependent frequency harmonic oscillator \(U^{\prime} (\hat{x};t)=k(t)\hat{x}\).
In order to find the explicit form of the invariant, we write it as
and we must find the differential equations that satisfy the coefficients α j (t). Substituting the invariant (29) in (27) and taking into account the commutation relations
we find the system of coupled equations
where in the sake of simplicity we have remove the time dependence in all variables. As result of the symmetry of the commutation relations (30), we get duplicated the same 3 × 3 system, one for the even coefficients and one for the odd ones. This system can be reduced to the single equation
for α2 or α1, where C is an integration constant. The other even functions are given by
and the odd ones by
being C1 and C2 integration constants.
If in eq. (39) the solution is proposed as α1(t) = ρ2(t)/2, we obtain
which is the Ermakov equation and represents the auxiliary condition for the invariant to be found.
Taking into account the Ermakov equation and Eqs (33) and (34), the invariant has the following operational structure
Appendix B
In this Appendix we show how to go from Eqs (18–20).
The first part of Eq. (18) contains the term \({\hat{T}}_{2}(0){\hat{T}}_{1}(0)\psi (x,p;0)\) and the last part the operator \({\hat{T}}_{1}^{\dagger }(t){\hat{T}}_{2}^{\dagger }(t)\); thus, we need the following relations
with f(t) an arbitrary function. Using these relations in the first part of (18) gives
where \({\rho }_{0}=\rho (0)\) and \({\dot{\rho }}_{0}=\dot{\rho }(0)\) are the initial conditions of the Ermakov equation.
Now, we have to apply the operator \({e}^{-i{\omega }_{\rho }(0,t)(\hat{p}{\hat{\lambda }}_{x}-\hat{x}{\hat{\lambda }}_{p})}\) on (38); so, we need to disentangle it. In order to do this, we define
As
the operators \({\hat{K}}_{\pm }\) and \({\hat{K}}_{0}\) are the generators of the angular-momeally, ntum algebra and it is very well known42 that
We have then
where
Finally applying again (37) to the last part of Eq. (18), the state vector at time t is given by
where
References
Koopman, B. O. Hamiltonian systems and transformation in hilbert space. Proc. Natl. Acad. Sci. 17, 315–318 (1931).
von Neumann, J. Zur operatorenmethode in der klassischen mechanik. Annals Math. 33, 587–642 (1932).
Mauro, D. waves, on koopman-von neumann. Int. J. Mod. Phys. A 17, 1301–1325 (2002).
Gozzi, E. & Mauro, D. Minimal coupling in koopman-von neumann theory. Annals Phys. 296, 152–186 (2002).
Deotto, E., Gozzi, E. & Mauro, D. Hilbert space structure in classical mechanics. i. J. Math. Phys. 44, 5902–5936 (2003).
Mauro, D. Topics in Koopman-von Neumann Theory. Ph.D. thesis. Dottorato di Ricerca in Fisica -XV Ciclo, Universita degli Studi di Trieste, Italy, 2002.
Gozzi, E. & Mauro, D. On koopman-von neumann waves ii. Int. J. Mod. Phys. A 19, 1475–1493 (2004).
Mauro, D. A new quantization map. Phys. Lett. A 315, 28–35 (2003).
Gozzi, E. & Mauro, D. Scale symmetry in classical and quantum mechanics. Phys. Lett. A 345, 273–278 (2005).
Carta, P., Gozzi, E. & Mauro, D. Koopman-von neumann formulation of classical yang-mills theories: I. Annalen der Physik 15, 177–215 (2006).
Gozzi, E. & Pagani, C. Universal local symmetries and nonsuperposition in classical mechanics. Phys. Rev. Lett. 105, 150604 (2010).
Gozzi, E. & Penco, R. Three approaches to classical thermal field theory. Annals Phys. 326, 876–910 (2011).
Rivers, R. J. Path integrals for (complex) classical and quantum mechanics. Acta Polytech. (Czech Republic) 51(No. 4), 83–89 (2011).
Cattaruzza, E., Gozzi, E. & Neto, A. F. Least-action principle and path-integral for classical mechanics. Phys. Rev. D 87, 067501 (2013).
Rajagopal, A. K. & Ghose, P. Hilbert space theory of classical electrodynamics. Pramana 86, 1161–1172 (2016).
Bondar, D. I., Cabrera, R., Lompay, R. R., Ivanov, M. Y. & Rabitz, H. A. Operational dynamic modeling transcending quantum and classical mechanics. Phys. Rev. Lett. 109, 190403 (2012).
Bondar, D. I., Cabrera, R., Zhdanov, D. V. & Rabitz, H. A. Wigner phase-space distribution as a wave function. Phys. Rev. A 88, 052108 (2013).
Cabrera, R., Bondar, D. I., Jacobs, K. & Rabitz, H. A. Efficient method to generate time evolution of the wigner function for open quantum systems. Phys. Rev. A 92, 042122 (2015).
Cabrera, R., Campos, A. G., Bondar, D. I. & Rabitz, H. A. Dirac open-quantum-system dynamics: Formulations and simulations. Phys. Rev. A 94, 052111 (2016).
Bondar, D. I., Cabrera, R., Campos, A., Mukamel, S. & Rabitz, H. A. Wigner-lindblad equations for quantum friction. The J. Phys. Chem. Lett. 7, 1632–1637, PMID: 27078510 (2016).
Zhdanov, D. V., Bondar, D. I. & Seideman, T. No thermalization without correlations. Phys. Rev. Lett. 119, 170402 (2017).
Solimeno, S., Porto, P. D. & Crosignani, B. Quantum harmonic oscillator with time dependent frequency. J. Math. Phys. 10, 1922–1928 (1969).
Lewis, H. R. Classical and quantum systems with time dependent harmonic oscillator type hamiltoni-ans. Phys. Rev. Lett. 18, 510–512 (1967).
Jr., H. R. L. & Riesenfeld, W. B. An exact quantum theory of the time dependent harmonic oscillator and of a charged particle in a time dependent electromagnetic field. J. Math. Phys. 10, 1458–1473 (1969).
Caldirola, P. Forze non conservative nella meccanica quantistica. IlNuovo Cimento (1924–1942) 18, 393–400 (1941).
Kanai, E. On the quantization of the dissipative systems. Prog. Theor. Phys. 3, 440–442 (1948).
Dodonov, V. V. & Man’ko, V. I. Coherent states and the resonance of a quantum damped oscillator. Phys. Rev. A 20, 550–560 (1979).
Vergel, D. G. & Villasenor, E. J. The time-dependent quantum harmonic oscillator revisited: Applications to quantum field theory. Annals Phys. 324, 1360–1385 (2009).
Moya-Cessa, H. & Guasti, M. F. Coherent states for the time dependent harmonic oscillator: the step function. Phys. Lett. A 311, 1–5 (2003).
Guasti, M. F. & Moya-Cessa, H. Solution of the schrodinger equation for time-dependent 1d harmonic oscillators using the orthogonal functions invariant. J. Phys. A: Math. Gen. 36, 2069 (2003).
Moya-Cessa, H. & Fernandez-Guasti, M. Time dependent quantum harmonic oscillator subject to a sudden change of mass: continuous solution. Revista Mexicana de Fisica 53, 42–46 (2007).
Ramos-Prieto, I., Espinosa-Zuniga, A., Fernandez-Guasti, M. & Moya-Cessa, H. M. Quantum harmonic oscillator with time dependent mass. arXiv: quant-ph/1712.08260 (2017).
Paul, W. Electromagnetic traps for charged and neutral particles. Rev. Mod. Phys. 62, 531–540 (1990).
Brown, L. S. Quantum motion in a paul trap. Phys. Rev. Lett. 66, 527–529 (1991).
Cirac, J. I., Garay, L. J., Blatt, R., Parkins, A. S. & Zoller, P. Laser cooling of trapped ions: The influence of micromotion. Phys. Rev. A 49, 421–432 (1994).
Moya-Cessa, H., Soto-Eguibar, F., Vargas-Martinez, J. M., Juarez-Amaro, R. & Zuniga-Segundo, A. Ion-laser interactions: The most complete solution. Phys. Reports 229–261 (2012).
Agarwal, G. S. & Kumar, S. A. Exact quantum-statistical dynamics of an oscillator with time-dependent frequency and generation of nonclassical states. Phys. Rev. Lett. 67, 3665–3668 (1991).
Stone, M. H. On one-parameter unitary groups in hilbert space. Annals Math. 33, 643–648 (1932).
Ehrenfest, P. Bemerkung uber die angenaherte gultigkeit der klassischen mechanik innerhalb der quantenmechanik. Zeitschrift fur Physik 45, 455–457 (1927).
Francois Gay-Balmaz, C. T. The hamiltonian setting of koopman-von neumann theory and the dynamics of hybrid classical-quantum systems. https://arxiv.org/abs/1802.04787 (2018).
Johansson, R. Numerical Python: A Practical Techniques Approach for Industry. (Apress, Berkely, CA, USA, 2015).
Dattoli, G., Ottaviani, P. L., Torre, A. & Vazquez, L. Evolution operator equations: Integration with algebraic and finite difference methods. applications to physical problems in classical and quantum mechanics and quantum field theory. LaRivista del Nuovo Cimento (1978–1999) 20, 3 (2008).
Acknowledgements
We are grateful to Denys I. Bondar for his comments and remarks about our manuscript. We also thank the reviewer for all his (her) corrections and suggestions. Irán Ramos-Prieto and Alejandro R. Urzúa-Pineda acknowledge the financial support from Conacyt PhD grants.
Author information
Authors and Affiliations
Contributions
Irán Ramos-Prieto had the idea and made the numerical simulations and all the authors developed and wrote the manuscript.
Corresponding authors
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ramos-Prieto, I., Urzúa-Pineda, A.R., Soto-Eguibar, F. et al. KvN mechanics approach to the time-dependent frequency harmonic oscillator. Sci Rep 8, 8401 (2018). https://doi.org/10.1038/s41598-018-26759-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-018-26759-w
This article is cited by
-
Exactly Solvable Model of Classical and Quantum Oscillators of Time Dependent Complex Frequencies: Squeezing Properties of Coherent Field
Brazilian Journal of Physics (2021)
-
Ermakov-Lewis Invariant in Koopman-von Neumann Mechanics
International Journal of Theoretical Physics (2020)
-
Light propagation in inhomogeneous media, coupled quantum harmonic oscillators and phase transitions
Scientific Reports (2019)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
