
Abstract
In our study, we set out to collect a multimodal annotated dataset for remote sensing of Maya archaeology, that is suitable for deep learning. The dataset covers the area around Chactún, one of the largest ancient Maya urban centres in the central Yucatán Peninsula. The dataset includes five types of data records: raster visualisations and canopy height model from airborne laser scanning (ALS) data, Sentinel-1 and Sentinel-2 satellite data, and manual data annotations. The manual annotations (used as binary masks) represent three different types of ancient Maya structures (class labels: buildings, platforms, and aguadas – artificial reservoirs) within the study area, their exact locations, and boundaries. The dataset is ready for use with machine learning, including convolutional neural networks (CNNs) for object recognition, object localization (detection), and semantic segmentation. We would like to provide this dataset to help more research teams develop their own computer vision models for investigations of Maya archaeology or improve existing ones.
Similar content being viewed by others

Background & Summary
Airborne laser scanning (ALS) surveys have proved crucial for advancement of knowledge in archaeological “site” distribution, particularly in the forested regions of the ancient Maya1,2,3, as they have greatly accelerated and expanded traditional archaeological landscape surveys. The research use of ALS in landscape archaeology typically involves the identification, localisation, recording and investigation of natural and cultural features for a variety of, usually interrelated, contexts, including but not limited to the mapping and analysis of settlement, urbanism, agricultural production and water management4,5,6,7,8,9,10,11.
Archaeologists typically inspect ALS data in the form of raster visualisations, which enhance the perception of surface features12,13,14. Human visual analysis and digitisation is time-consuming and the examination of hundreds of square kilometres can take months, depending on the level of detail, number of structures, and the recording method. Despite the lack of large-scale, high-resolution, publicly available ALS datasets of the ancient Maya region, dispersed private and public funding has made it possible to conduct not only site-specific landscape studies over a few square kilometres e.g.7,15,16,17,18, but also large-scale studies over several hundred or even several thousand square kilometres e.g.3,5,11,19,20,21,22,23. The volume of data makes it difficult to annotate entire datasets, especially if not only the locations of objects, but also their shape is to be indicated. The subjectivity of human visual inspection and digitisation and the variability between human interpreters is also an issue24. There is therefore a pressing need to employ computer vision methods that can find archaeological objects and delineate their boundaries automatically25,26. Among the various machine learning approaches, deep convolutional neural networks (CNNs) are the current state-of-the-art for computer vision, but they usually require a large number of already labelled samples27 for training. This makes labelled datasets crucial for developing and testing the methods.
In one of our own previous studies, we have already demonstrated that CNNs can classify ancient Maya archaeological objects from DEM visualisations, achieving up to 95% accuracy28. However, classification models do not have the potential to replace manual inspection and labelling, for which semantic segmentation is required. Semantic segmentation is readily applied in remote sensing a review is given by27, but even more so in medical imaging, where CNNs often outperform experts29,30,31,32,33,34.
The original intention for collecting the ALS data in the area around Chactún, one of the largest ancient Maya urban centres known so far in the central lowlands of the Yucatan Peninsula, was to better understand the water management, agriculture, settlement dynamics and socio-political organisation of the ancient Maya living in this area11,35.
We generated a labelled dataset that can be used for the analysis of ancient Maya archaeology comprising more than 10.000 objects, divided into three different classes; buildings, platforms, aguadas (artificial water basins). We used polygonised outlines of objects to create binary raster masks. The associated multimodal dataset contains data from three remote sensing sources:
-
0.5 m resolution ALS data visualisations28 (sky view factor, positive openness, slope),
-
1.0 m resolution ALS canopy height model,
-
10 m resolution Sentinel-1 Short Aperture Radar (SAR) satellite data (annual average Sigma0), and
-
10, 20 and 60 m resolution Sentinel-2 optical satellite data (12 bands + s2cloudless cloud mask, 17 dates).
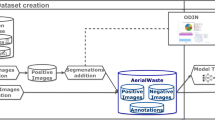
Sentinel-1 and 2 Earth observation missions are part of the European Union Copernicus Programme. An overview of the experimental workflow used to generate and analyse the data is presented in Fig. 1.

An overview of the experimental workflow used to generate and analyse the data.
The application of CNN methods in archaeological prospection has just begun to gain momentum e.g.28,36,37,38,39,40,41; currently, however, there are only a few CNN-based semantic segmentation studies conducted with ALS data26,42,43,44,45,46, and even fewer instance segmentation models published in this particular field47. Easily accessible, archaeologically labelled datasets suitable for machine learning are therefore extremely rare. We believe that sharing a large labelled dataset that allows semantic segmentation, because it is based on polygonised objects rather than centroids, points, or simple bounding boxes, has great reuse value. This dataset is also unique because it is multimodal and, to date, the only one in the Maya region. Such a rich dataset allows related research groups to develop or improve their own segmentation models. This has already led to improvements in recognition rates, as the dataset was used in the Discovering the mysteries of the Maya machine learning competition48,49. The teams that took part in this machine learning challenge achieved a segmentation performance of more than 0.83 for the intersection over union (IoU, also known as the Jaccard index) when learning from ALS data. However, most teams did not include satellite data in their final model. Deep learning from ALS visualisations alone produced better results with much less machine learning engineering effort. However, by providing a multimodal dataset for a wider reuse, we hope other teams can develop new models based on architectures that can better harness the information in the satellite data.
Methods
Site description
The area around Chactún (Fig. 2) is karstic and therefore lacks perennial water and permanent water streams. Low hills typically rise up to 30 m above the surrounding seasonal wetlands (bajos). The climate in the Maya lowlands is tropical and isothermal50,51 and within the elevated interior region rainfall is highly seasonal and spatially variable. Typically, 90% of precipitation occurs during the rainy season9. The entire study area is covered by natural, unmanaged, tropical semi-deciduous forest and bushes, rarely exceeding 20 m in height. The forest can be classified as primary forest, where there has been no agricultural or grazing activity for a millennium. Before the establishment of the Calakmul Biosphere Reserve in 1989, selective logging for valuable timber and chicle collection were the main economic activities.

Location of the study area with delineated area of the airborne laser scanning mission. Data records were extracted from its southern part (coloured in red) adapted from28.
Šprajc and his team discovered the urban core of Chactún, composed of three concentrations of monumental architecture, in 201352. Temple-pyramids, massive palace-like buildings and two ball courts surround its several plazas. A large rectangular water reservoir lies immediately to the west of the main groups of structures. Ceramics collected from the ground surface, the architectural characteristics and dated monuments indicate that the centre began to flourish in the Preclassic period (c. 1000 BC–250 AD), and reached its climax during the Late Classic (c. 600–1000 AD) playing an important role in the regional political hierarchy52,53. South of Chactún are Lagunita and Tamchén, both prominent urban centres. Numerous smaller building clusters are scattered on the hills around them54,55.
Survey information
The whole dataset includes five different types of data records:
-
airborne laser scanning (ALS) raster visualisations,
-
ALS data derived canopy height model,
-
Sentinel-1 synthetic aperture radar satellite data,
-
Sentinel-2 optical satellite data, and
-
data annotations.
Airborne laser scanning data
The main part of the dataset consists of visualised airborne laser scanning data collected with the Titan system by the National Centre for Airborne Laser Mapping (NCALM) at the end (peak) of the dry season in May 2016. Mission planning, data acquisition and data processing were carried out with clear archaeological objectives in mind56,57. The density of the final point cloud and the quality of the derived elevation model with a 0.5 m spatial resolution (Table 1) proved to be excellent for the detection and interpretation of archaeological features with very clearly defined minute elevation differences.
The technical quality control of the data included verification of the scanning density, the absolute horizontal accuracy (better than 20 cm), the absolute vertical accuracy (better than 15 cm), and the thematic accuracy of the produced elevation model.
Ground points were classified using Terrascan software (version 016.013), which uses an adaptive triangular irregular networks densification algorithm58. The algorithm settings were optimised to remove only the vegetation cover, leaving the remains of past human activities as intact as possible (Table 2). Ground points therefore include remains of buildings, walls, terraces, mounds, chultuns (cisterns), sacbeob (raised paved roads), and drainage channels (Fig. 3). Rare areas without ground returns include aguadas with water. Many landscape features, such as ditches and low field walls, were essentially invisible in the field, due to dense vegetation, and would most likely have been missed by conventional surface mapping. As revealed by ground-truthing, the elevation model contains very few data collection and processing artefacts (commission and omission errors). Instances of omission errors are limited to smaller objects, such as altars, while commission errors mostly include larger tree trunks. In some places, parts of buildings are misshapen, for example walls being classified as vegetation because a tree is growing from a chamber on top of a pyramidal building.

Examples of buildings (a–g,i,j), platforms (a–j), and aguadas (k–o) that have been annotated and are included in the dataset. Other man-made structures such as walls, channels, terraces, rock-piles, etc. were not annotated (p–t). All panels have the same scale and cover about a quarter of a single data record area (Fig. 5). The visualisation is for illustrative purposes only; it combines a coloured simplified local relief model with a combined visualisation for archaeological topography.
We used raster ALS data visualisations to support the human vision interpretation of objects and as a three-band dataset for the data records. ALS raster data visualisations are computed derivatives of a digital elevation model that provide information about the landscape. They can have a purely presentational value or can relate to physical quantities59. In effect, they facilitate ‘reading and exploring’ the landscape in search of meaningful information. The primary visualisation was a combined visualisation for archaeological topography (VAT)13. It blends two combinations of four distinct visualisations: analytical hillshading, slope, positive openness and sky-view factor (SVF)12, computed with settings for normal and flat terrain (Table 3). The individual visualisation methods are complimentary, depicting small topographic variations in different ways, and the combined image preserves their positive characteristics. Before blending, the visualisations are normalised and have a custom histogram stretch applied. Having a single combined visualisation to consider has advantages, including better representation of structures in a wider range of terrain types, conservation of disk space, and faster display. VAT was created in the Relief Visualization Toolbox (RVT; https://github.com/EarthObservation/RVT_py). The calculation takes about half a minute per km2 for data at 0.5 m resolution on a normal office laptop. VAT has already been used for pedestrian surveys in a range of environments, from semi-deciduous tropical forests of Mexico to the largely open heather and scrubland of western Scotland and the karstic, rugged terrain of the Mediterranean. The visualisation does not introduce artefacts and shows small-scale features well, regardless of their orientation and shape. However, it is not completely orientation independent, as hillshading is used as the base layer. It aids human vision interpretation, but uses directional light source and is therefore not suitable for data augmentation techniques such as rotation and flipping. Therefore, only sky-view factor, positive openness, and slope, which are all direction independent, were used to create three-band (RGB) data records. These also ranked highest in our study of the performance of different visualisations and visualisation combinations for the classification task with CNNs28. Local dominance12 served as an additional aid for human vision interpretation of outer boundaries of aguadas, which are usually very faintly raised above the surrounding flat terrain.
In addition, we provide a canopy height model (CHM) with a resolution of 1 m, computed with a spike-free algorithm60 implemented in the LAStools las2dem tool (version 230330). The processing parameters are listed in Table 4. Based on visual inspection, we removed all points that are more than 30 m above the ground (or a building), as they represent noise rather than a true measurement of tree heights.
The raw ALS data was provided by ZRC SAZU as part of a collaboration between the authors of this paper. As Chactún, Lagunita and Tamchén have only recently been (re)discovered and are remote and difficult to access, their exact location is not known to the general public. The density of ancient Maya anthropogenic structures and terrain modifications in this area is astonishing, reaching the level of mayor urban centres like Tikal, but is still almost completely unexplored archaeologically. To prevent looting, the locations of the urban cores and the numerous smaller settlement groups are restricted to researchers. The full ALS data is therefore not publicly available. However, investigators who wish to use it for a specific application should approach ZRC SAZU directly by contacting the corresponding author, describing the topic and goals of their project.
Sentinel-1 synthetic aperture radar satellite data
The Sentinel-1 satellite constellation provides C-band Synthetic Aperture Radar (SAR) data. The first satellite, Sentinel-1A, was launched in April 2014, followed by Sentinel-2 in April 2016. The latter was decommissioned after data collection ceased due to power failure on 23 December 2021. The dual constellation had a repetition frequency of 6 days and a revisit frequency (in ascending and descending orbit) of 3 days at the equator. A single satellite has a revisit frequency of 6 days at the equator.
For this study, we used data acquired by both satellites in the Interferometric Wide (IW) swath mode, as this is the primary acquisition mode over land with the largest data archive. We used the Level-1, Ground Range Detected (GRD) product with dual polarisation (Vertical Transmit – Horizontal Receive Polarisation (VV) and Vertical Transmit – Vertical Receive Polarisation (VH)) for both ascending (ASC) and descending (DES) orbits. The backscatter coefficient used was Sigma0. The values of the backscatter coefficient were converted from linear power to decibels (dB), fitted to an interval of [−30, 5] dB, and normalised to the range [0, 1].
We used SAR data for the years 2017–2020, with 114 ascending orbit (ASC) images and 205 descending orbit (DES) images, collected from Sentinel Hub61. A total of 319 Sentinel-1 images were acquired over the study area, each containing data for VV and VH polarisation with 10 m spatial resolution. We calculated the following temporal statistics for each pixel: mean, median, standard deviation, coefficient of variance, and 5th and 95th percentiles. We calculated the statistics for each year within the observation period and for the entire period. The data were stored as a multiband raster (120 bands) in the Tagged Image File Format (TIFF) format (Fig. 5 and Table 8). All processing was done with our own code and the Python packages eolearn (version 1.4.2) and sentinelhub (version 3.9.1).
Due to the complete absence of modern anthropogenic objects and measured permanent scatterers in our study area, it was impossible to verify the positional accuracy of the SAR data. However, according to the Sentinel-1 Annual Performance Report62, the geolocation accuracy of the IW swath mode products without geometric corrections is −3.5 m for range and 2.1 m for azimuth. The absolute localisation error is therefore well below the mission requirements of 10 m at 95% confidence.
Sentinel-2 optical satellite data
The Sentinel-2 optical satellite mission began with the launch of Sentinel-2A in June 2015, followed by Sentinel-2B in March 2017. Both satellites carry a single multi-spectral instrument (MSI) with 13 spectral channels in the visible/near-infrared (VNIR) and shortwave infrared spectral range (SWIR). The spatial resolution is 10 m for four bands, 20 m for six bands and 60 m for three bands (Table 5).
The geographical and climatic characteristics of the study area are manifested in a high proportion of cloudy optical satellite images. Out of 658 Level-2A images acquired during 2017–202061, 78 have cloud cover of less than 5%, however, small convective clouds or haze are present in most of them. We calculated a cloud mask with a 10 m resolution for each acquisition date and performed a manual visual inspection of the set to finally select the 17 images without cloud cover over the study area. We resampled all bands to 10 m resolution using the nearest neighbour resampling method. The dataset therefore comprises 12 spectral bands (excluding band 10) and a corresponding cloud mask, computed using s2cloudless63 (available at https://github.com/sentinel-hub/sentinel2-cloud-detector) adjusted to 10 m resolution, for 17 dates (Fig. 4) (221 bands in total), saved in the TIFF format (Fig. 5 and Table 8). We excluded spectral band 10 (also known as the cirrus band) because it does not contain surface information. It is used for atmospheric corrections and is therefore not included in the atmospherically corrected Level 2 A product. All processing was done with our own code and the Python packages eolearn (version 1.4.2) and sentinelhub (version 3.9.1).

The selected Sentinel-2 acquisition dates over the study area with close-up views.

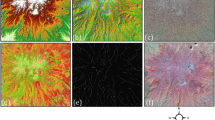
A single data record (e.g. 1469) contains (a) binary masks of structures, (b) a tile with ALS data visualisations, (c) a tile with a canopy height model, (d) a tile with annual statistics for Sentinel-1 Sigma0 backscatter coefficients, and (e) a tile with Sentinel-2 bands for 17 cloudless scenes.
According to the Sentinel-2 Annual Performance Report64, the absolute geometric accuracy of Sentinel-2 L2A data is better than 6 m, multi-temporal co-registration of the same or different satellites in the same repeat orbit is better than 5 m at 95% confidence, and multi-temporal co-registration in different repeat orbits is better than 5 m.
Annotations
Many machine learning and deep learning studies in archaeological prospection use ALS visualisations with simple annotations that do not delineate the exact boundaries of objects. Such studies mostly use points and simple bounding boxes as annotations, which makes them primarily suitable for tasks dealing with object classification or object localisation (detection), rather than semantic segmentation. For segmentation purposes, the exact boundaries of an object are a prerequisite.
To create a dataset suitable for supervised segmentation, we delineated polygons for archaeological objects. Data annotation was done by a single person. The manual work took roughly 8 full working months and resulted in 9303 buildings and 2110 platforms annotated in the southern part (130 km2), and 95 aguadas annotated in the whole study area (220 km2) (Table 6). The platforms are apparently artificial, flat surfaces that stand out from the surrounding terrain, support other structures or most likely had this function, even if no buildings are currently visible. Buildings include various types of raised structures such as temple-pyramids, palace-like buildings, ball courts, single or multi-room houses and residential complexes. Aguadas are mostly clay-lined depressions capable of holding water through the dry season see also35.
The perimeter polygon around a building or platform was drawn where the interpreter could define the boundary between artificial (modified) and natural terrain on VAT. Wherever possible, a single polygon represents a single instance, a single structure. However, because buildings are often closely connected architecturally or due to collapsed material, a precise boundary between structures is sometimes difficult to determine. As a result, a single polygon often contains more than one building. Polygons of buildings and platforms regularly overlap, but there are also many examples of platforms without buildings and of buildings that are not on a platform.
We used local dominance (LD) visualisation to complement the VAT for annotating aguadas and larger water reservoirs. LD is particularly suitable for depicting their slightly raised embankments.
All polygons of the same type (building, platform, or aguada) were saved as separate vector layers. The annotations were revised and curated by an expert archaeologist with deep local knowledge of the area. In very ambiguous cases where it was difficult to determine whether a formation is natural or anthropogenic, e.g. whether an object is a small, eroded platform or a naturally levelled terrain, consensus was reached within a panel of experts. We discussed the issues individually or agreed on a new rule if there were many similar examples.
The modified landscape contains many other types of anthropogenic structures such as terraces, quarries, walls, sacbeob (raised paved roads), chultunob (underground storage chambers), channels, rock piles etc. To save time, we did not annotate these initially, as we were primarily interested in the number and cumulative volume of buildings and the volume of available water to determine the number of people living in the area and the labour required to construct the structures in question. Because the study did not prioritize agricultural aspects, areas with channels in bajos and of terraces were delineated later and this data is not included in the data records. Other smaller and less pronounced anthropogenic structures, such as short walls, are also numerous and often eroded, making them harder to distinguish from natural formations. With the unlabelled data now made available, future researchers can annotate these existing records for further projects dealing with ancient Maya land use.
Binary masks
Vector polygons representing each object class were rasterised to create a binary segmentation mask for that class. The rasterisation was done using the Geospatial Data Abstraction Library (GDAL). The masks were converted to TIFF files, and serve as labelled data for training, validation, and testing.
Tiling
The fully annotated area of about 130 km2 was split into tiles of 240 × 240 meters. Each data record consists of tiles with multiple layers, except for the CHM which has only one layer (Fig. 5):
-
three binary segmentation masks (one each for building, platform and aguada class),
-
the ALS visualisations tile with three layers,
-
the canopy height model,
-
the Sentinel-1 image tile with multiple layers, and
-
the Sentinel-2 image tile with multiple layers.
In accordance with the original DEM resolution of 0.5 m, visualisations and binary mask tiles each have a size of 480 × 480 pixels, the CHM has a size of 240 × 240 pixels, while the Sentinel-1 and 2 data have 24 × 24 pixels. The neighbouring tiles do not touch or overlap, but are separated by a buffer of 20 meters. The geographic location of tiles was chosen to match the 10 m grid of Sentinel-2 data.
Data Records
Tiled binary masks, ALS visualisations, Sentinel-1, and Sentinel-2 satellite data are archived in Figshare online repository65. The dataset contains 2094 data records with an object in at least one of the segmentation masks. The randomly selected set of 1765 data records (tiles 0–1764) was initially published for the participants of the Discover the mysteries of the Maya online challenge that we organised in the framework of the European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases (ECML PKDD 2021)48,49, while the remaining 329 (tiles 1765–2093) were withheld for testing the submitted deep learning models (Fig. 6). The file format for all tiles is uncompressed TIFF. Geolocation data was intentionally omitted to avoid revealing the exact location of the archaeological remains. Tiles were randomly numbered to prevent reconstruction of the entire study area. An example of a data record with details of each tile can be found in Fig. 5 and in Tables 7, 8.
The filename structure for each data record is tile_<consecutive-number>_<data-source>.tif, where the data source can specify a mask, ALS visualisations (lidar), CHM, or Sentinel data (S1 or S2). The sequential number is a unique identifier of a data record; all files with the same sequential number represent the same geographical area, but differ in the number of pixels (480 × 480 pixels, 240 × 240 pixels or 24 × 24 pixels) and bit depth (8-bit integer or 32-bit float) (Table 7).
Each Sentinel-1 tile consists of 120 bands (5 periods × 24 bands) sorted as follows (Fig. 5 and Table 8):
-
data are first ordered by year, with the entire period last (2017, 2018, 2019, 2020, 2017–2020), they are then
-
ordered by the orbit (ascending – ASC, descending – DES),
-
ordered by the corresponding polarization (VV, VH), and finally
-
ordered by the calculated statistics (mean, median, standard deviation – std, coefficient of variance – var, 5th percentile – p5, 95th percentile – p95).
Each Sentinel-2 tile consists of 221 bands (17 dates × 13 bands), ordered by acquisition date (from newest to oldest), the corresponding spectral bands, and the associated cloud mask (Fig. 5 and Table 8).
A single data record is 2.35 Mb in size, while the total size by type is as follows: 1,449 MB for masks, 1,449 MB for ALS visualisations, 484 MB for CHM, 581 MB for Sentinel-1, and 1,070 MB for Sentnel-2 (a total of 5,033 MB). The repository stores ZIP compressed data, compiled by type (masks, lidar, CHM, S1, S2). The total size of the compressed files is 2,214 MB.
Technical Validation
Because of the wide variety of data used to create the data records, we have described the process for obtaining the best possible input for each of the sources in the relevant section of the Methods chapter. The object boundaries resulting from the interpretation of the ALS data serve as ground truth. Based on the 10 m buffer from ground tracks from the 2017 and 2018 field verification campaigns, we verified 33.3% of aguadas, 22.4% of buildings, and 24.2% of platforms in the field (Fig. 6). Given the extreme difficulty of fieldwork in the remote and densely vegetated area, these are very high numbers. We did not record the errors systematically and cannot give exact frequencies for overlooked objects. However, the quality of our ALS data and the nature of the archaeological structures surveyed suggest that the number of structures we may have overlooked or mislabelled is likely to be very small. The experience of archaeologists working in the Neotropics shows that interpretations derived from ALS data are very reliable and that field verification can be less consistent over larger areas as conditions make efficient investigation impossible.

Learning (train and validation) and test tiles with ground tracks of two field verification campaigns.
Code availability
ALS visualisations were calculated with Relief Visualization Toolbox (version 2.2.1), available at https://github.com/EarthObservation/RVT_py.
The code for creating the satellite data records from Sentinel-1 and Sentinel-2 is available at https://github.com/EarthObservation/Sentinel-S1-S2-ML-patches-workflow.
References
Chase, A. F., Reese-Taylor, K., Fernandez-Diaz, J. C. & Chase, D. Z. Progression and Issues in the Mesoamerican Geospatial Revolution: An Introduction. Advances in Archaeological Practice 4, 219–231 (2016).
Beach, T. et al. Ancient Maya impacts on the Earth’s surface: An Early Anthropocene analog? Quaternary Science Reviews 124, 1–30 (2015).
Canuto, M. A. et al. Ancient lowland Maya complexity as revealed by airborne laser scanning of northern Guatemala. Science 361, eaau0137 (2018).
Chase, A. F. et al. Airborne LiDAR, archaeology, and the ancient Maya landscape at Caracol, Belize. Journal of Archaeological Science 38, 387–398 (2011).
Chase, A. F. et al. The Use of LiDAR in Understanding the Ancient Maya Landscape: Caracol and Western Belize. Advances in Archaeological Practice 2, 208–221 (2014).
Ebert, C. E., Hoggarth, J. A. & Awe, J. J. Integrating Quantitative Lidar Analysis and Settlement Survey in the Belize River Valley. Advances in Archaeological Practice 4, 284–300 (2016).
Fisher, C. T., Cohen, A. S., Fernandez-Diaz, J. C. & Leisz, S. J. The application of airborne mapping LiDAR for the documentation of ancient cities and regions in tropical regions. Quaternary International 448, 129–138 (2017).
Beach, T. et al. Ancient Maya wetland fields revealed under tropical forest canopy from laser scanning and multiproxy evidence. PNAS 116, 21469–21477 (2019).
Dunning, N. P. et al. Margin for error: Anthropogenic geomorphology of Bajo edges in the Maya Lowlands. Geomorphology 331, 127–145 (2019).
Stanton, T. W. et al. ‘Structure’ density, area, and volume as complementary tools to understand Maya Settlement: An analysis of lidar data along the great road between Coba and Yaxuna. Journal of Archaeological Science: Reports 29, 102178 (2020).
Šprajc, I. et al. Ancient Maya water management, agriculture, and society in the area of Chactún, Campeche, Mexico. Journal of Anthropological Archaeology 61, 101261 (2021).
Kokalj, Ž. & Hesse, R. Airborne laser scanning raster data visualization: A guide to good practice. (Založba ZRC, 2017).
Kokalj, Ž. & Somrak, M. Why Not a Single Image? Combining Visualizations to Facilitate Fieldwork and On-Screen Mapping. Remote Sensing 11, 747 (2019).
Devereux, B. J., Amable, G. S. & Crow, P. Visualisation of LiDAR terrain models for archaeological feature detection. Antiquity 82, 470–479 (2008).
Horn, S. W. III & Ford, A. Beyond the magic wand: methodological developments and results from integrated Lidar survey at the ancient Maya Center El Pilar. STAR: Science & Technology of Archaeological Research 0, 1–15 (2019).
Hutson, S. R. Adapting LiDAR data for regional variation in the tropics: A case study from the Northern Maya Lowlands. Journal of Archaeological Science: Reports 4, 252–263 (2015).
Inomata, T. et al. Monumental architecture at Aguada Fénix and the rise of Maya civilization. Nature 582, 530–533 (2020).
von Schwerin, J. et al. Airborne LiDAR acquisition, post-processing and accuracy-checking for a 3D WebGIS of Copan, Honduras. Journal of Archaeological Science: Reports ume 5, 85–104 (2016).
Chase, A. F. & Chase, D. Z. Detection of Maya Ruins by LiDAR: Applications, Case Study, and Issues. in Sensing the Past: From artifact to historical site (eds. Masini, N. & Soldovieri, F.) 455–468, https://doi.org/10.1007/978-3-319-50518-3_22 (Springer International Publishing, 2017).
Hansen, R. D. et al. Developmental Dynamics, Energetics, and Complex Economic Interactions of the Early Maya of the Mirador-Calakmul Basin, Guatemala, and Campeche, Mexico. in Pathways to Complexity (eds. Brown, M. K. & Bey, G. J.) 147–194, https://doi.org/10.2307/j.ctvx075hx.12 (University Press of Florida, 2018).
Inomata, T. et al. Archaeological Application of Airborne LiDAR with Object-Based Vegetation Classification and Visualization Techniques at the Lowland Maya Site of Ceibal, Guatemala. Remote Sens. 9, 563 (2017).
Jantz, P., Goetz, S. & Laporte, N. Carbon stock corridors to mitigate climate change and promote biodiversity in the tropics. Nature Climate Change 4, 138–142 (2014).
Ruhl, T., Dunning, N. P. & Carr, C. Lidar reveals possible network of ancient Maya marketplaces in southwestern Campeche, Mexico. Mexicon 40, 83–91 (2018).
Banaszek, Ł., Cowley, D. C. & Middleton, M. Towards National Archaeological Mapping. Assessing Source Data and Methodology - A Case Study from Scotland. Geosciences 8, 272 (2018).
Verschoof-van der Vaart, W. B. & Lambers, K. Learning to Look at LiDAR: The Use of R-CNN in the Automated Detection of Archaeological Objects in LiDAR Data from the Netherlands. Journal of Computer Applications in Archaeology 2, 31–40 (2019).
Bundzel, M. et al. Semantic Segmentation of Airborne LiDAR Data in Maya Archaeology. Remote Sensing 12, 3685 (2020).
Neupane, B., Horanont, T. & Aryal, J. Deep Learning-Based Semantic Segmentation of Urban Features in Satellite Images: A Review and Meta-Analysis. Remote Sensing 13, 808 (2021).
Somrak, M., Džeroski, S. & Kokalj, Ž. Learning to classify structures in ALS-derived visualizations of ancient Maya settlements with CNN. Remote Sensing 12, 2215 (2020).
Esteva, A. et al. Dermatologist-level classification of skin cancer with deep neural networks. Nature 542, 115–118 (2017).
Tj, B. et al. Deep neural networks are superior to dermatologists in melanoma image classification. European journal of cancer (Oxford, England: 1990) 119, (2019).
Rc, M. et al. Systematic outperformance of 112 dermatologists in multiclass skin cancer image classification by convolutional neural networks. European journal of cancer (Oxford, England: 1990) 119 (2019).
Eskreis-Winkler, S. et al. Breast MRI Background Parenchymal Enhancement Categorization Using Deep Learning: Outperforming the Radiologist. Journal of Magnetic Resonance Imaging 56, 1068–1076 (2022).
Pei, L., Vidyaratne, L., Rahman, M. M. & Iftekharuddin, K. M. Context aware deep learning for brain tumor segmentation, subtype classification, and survival prediction using radiology images. Sci Rep 10, 1–11 (2020).
Hirsch, L. et al. Radiologist-Level Performance by Using Deep Learning for Segmentation of Breast Cancers on MRI Scans. Radiology: Artificial Intelligence, https://doi.org/10.1148/ryai.200231 (2021).
Šprajc, I. et al. Archaeological landscape, settlement dynamics, and sociopolitical organization in the Chactún area of the central Maya Lowlands. PLOS ONE 17, e0262921 (2022).
Caspari, G. & Crespo, P. Convolutional neural networks for archaeological site detection – Finding “princely” tombs. Journal of Archaeological Science 110, 104998 (2019).
Bonhage, A. et al. A modified Mask region-based convolutional neural network approach for the automated detection of archaeological sites on high-resolution light detection and ranging-derived digital elevation models in the North German Lowland. Archaeological Prospection 28, 177–186 (2021).
Davis, D. S., Caspari, G., Lipo, C. P. & Sanger, M. C. Deep learning reveals extent of Archaic Native American shell-ring building practices. Journal of Archaeological Science 132, 105433 (2021).
Davis, D. S. & Lundin, J. Locating Charcoal Production Sites in Sweden Using LiDAR, Hydrological Algorithms, and Deep Learning. Remote Sensing 13 (2021).
Verschoof-van der Vaart, W. B. & Lambers, K. Applying automated object detection in archaeological practice: A case study from the southern Netherlands. Archaeological Prospection 1–17, https://doi.org/10.1002/arp.1833 (2021).
Verschoof-van der Vaart, W. B. & Landauer, J. Using CarcassonNet to automatically detect and trace hollow roads in LiDAR data from the Netherlands. Journal of Cultural Heritage 47, 143–154 (2021).
Kazimi, B., Thiemann, F. & Sester, M. Semantic Segmentation of Manmade Landscape Structures in Digital Terrain Models. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences 42W7, 87–94 (2019).
Soroush, M., Mehrtash, A., Khazraee, E. & Ur, J. A. Deep Learning in Archaeological Remote Sensing: Automated Qanat Detection in the Kurdistan Region of Iraq. Remote Sensing 12, 500 (2020).
Guyot, A., Lennon, M., Lorho, T. & Hubert-Moy, L. Combined Detection and Segmentation of Archeological Structures from LiDAR Data Using a Deep Learning Approach. Journal of Computer Applications in Archaeology 4, 1–19 (2021).
Banasiak, P. Z. et al. Semantic Segmentation (U-Net) of Archaeological Features in Airborne Laser Scanning—Example of the Białowieża Forest. Remote Sensing 14, 995 (2022).
Küçükdemirci, M., Landeschi, G., Ohlsson, M. & Dell’Unto, N. Investigating ancient agricultural field systems in Sweden from airborne LIDAR data by using convolutional neural network. Archaeological Prospection 30, 209–219 (2023).
Kazimi, B., Thiemann, F. & Sester, M. Object Instance Segmentation in Digital Terrain Models. in Computer Analysis of Images and Patterns (eds. Vento, M. & Percannella, G.) 488–495, https://doi.org/10.1007/978-3-030-29891-3_43 (Springer International Publishing, 2019).
Simidjievski, N. et al. Discover the mysteries of the Maya: ECML PKDD 2021 - Discovery Challenge. (2021).
Discover the mysteries of the Maya. Selected contributions from the machine learning challenge & the discveory challenge workshop, ECML PKDD 2021. (Jožef Stefan Institute, 2022).
Dunning, N. P. & Beach, T. Farms and Forests: Spatial and Temporal Perspectives on Ancient Maya Landscapes. in Landscapes and Societies: Selected Cases (eds. Martini, I. P. & Chesworth, W.) 369–389, https://doi.org/10.1007/978-90-481-9413-1_23 (Springer Netherlands, 2011).
Beach, T. et al. Stability and instability on Maya Lowlands tropical hillslope soils. Geomorphology 305, 185–208 (2018).
Šprajc, I. Introducción. in Exploraciones arqueológicas en Chactún, Campeche, México (ed. Šprajc, I.) 1–3 (Založba ZRC, 2015).
Šprajc, I., Flores Esquivel, A. & Marsetič, A. Descripción del sitio. in Exploraciones arqueológicas en Chactún, Campeche, México (ed. Šprajc, I.) 5–24 (Založba ZRC, 2015).
Šprajc, I. et al. Chactún, Tamchén y Lagunita: primeras incursiones arqueológicas a una región ignota. Arqueología Mexicana 24, 20–25 (2015).
Archaeological Reconnaissance in Eastern Campeche, Mexico: Chactun, Tamchen, and Lagunita. (Tulane University, 2021).
Fernandez-Diaz, J. C., Carter, W. E., Shrestha, R. L. & Glennie, C. L. Now You See It… Now You Don’t: Understanding Airborne Mapping LiDAR Collection and Data Product Generation for Archaeological Research in Mesoamerica. Remote Sens. 6, 9951–10001 (2014).
Fernandez-Diaz, J. C. et al. Capability Assessment and Performance Metrics for the Titan Multispectral Mapping Lidar. Remote Sens. 8, 936 (2016).
Axelsson, P. DEM Generation from Laser Scanner Data Using Adaptive TIN Models. in International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences - ISPRS Archives vol. 33, 110–117 (International Society for Photogrammetry and Remote Sensing, 2000).
Kokalj, Ž. & Oštir, K. Lidar data visualization and processing. in The Encyclopedia of Archaeological Sciences 1–6, https://doi.org/10.1002/9781119188230.saseas0347 (John Wiley & Sons, Ltd, 2018).
Khosravipour, A., Skidmore, A. K. & Isenburg, M. Generating spike-free digital surface models using LiDAR raw point clouds: A new approach for forestry applications. International Journal of Applied Earth Observation and Geoinformation 52, 104–114 (2016).
Modified Copernicus Sentinel data (2017–2020). Sentinel Hub https://apps.sentinel-hub.com/eo-browser (2023).
Sentinel-1 Mission Performance Centre. S-1 Annual Performance Report for 2022. 117, https://sentinel.esa.int/documents/247904/4889382/DI-MPC-APR-0588-1-2-track-Annual+Performance+Report+2022.pdf/a683c9d2-06c2-9143-b456-4a9c8e30e449?t=1678771841042 (2023).
Aleksandrov, M. et al. Sentinel Hub’s cloud detector for Sentinel-2 imagery. (2020).
Sentinel-2 MSI Expert Support Laboratory team. Sentinel-2 Annual Performance Report – Year 2022. 132, https://sentinels.copernicus.eu/documents/247904/4893455/OMPC.CS.APR.001+-+i1r0+-+S2+MSI+Annual+Performance+Report+2022.pdf (2023).
Kokalj, Ž. et al. Machine learning-ready remote sensing data for Maya archaeology: masks, ALS data, Sentinel-1, Sentinel-2. figshare https://doi.org/10.6084/m9.figshare.22202395 (2023).
European Space Agency. Sentinel-2 Spectral Response Functions (S2-SRF). 5, https://sentinels.copernicus.eu/documents/247904/685211/S2-SRF_COPE-GSEG-EOPG-TN-15-0007_3.1.xlsx (2022).
Acknowledgements
All necessary permits were obtained for the described study, which complied with all relevant regulations. The research was authorized by the Instituto Nacional de Antropología e Historia (INAH), Mexico (Consejo de Arqueología permits 401.1 S.3-2017/117, of Jan 30, 2017, and 401.1 S.3-2018/132, of Jan 30, 2018), and approved by the Calakmul Biosphere Reserve (permits D-RBC-029/2017, of March 17, 2017, and D-RBC-039/2018, of March 22, 2018). The research was funded by the Slovenian Research Agency through The Chactún Regional Project (J6-7085; 2016-18) and research programs Anthropological and Spatial Studies (P6-0079; 2015-21), Earth Observation and Geoinformatics (P2-0406; 2019-24) and Knowledge Technologies (P2-0103; 2022-27), and by the European Space Agency project Artificial Intelligence Toolbox for Earth Observation (AiTLAS 2020-21). Fieldwork was co-financed by the KJJ Charitable Foundation, presided by Ken and Julie Jones (USA), and additionally supported by Hotel Río Bec Dreams (Mexico), Ars longa, Adria Kombi, Abanka, Zavarovalnica Triglav, Rokus Klett, Parka Group, GKTI, BSL, Klemen Fedran, Martin Hobel, and Aleš Obreza (Slovenia).
Author information
Authors and Affiliations
Contributions
Ž.K. conceived and designed the research, provided the ALS data specification needed for the survey and processed the collected ALS data to create digital elevation models, performed the technical validation, analysed the satellite data, and designed the figures. I.Š. conceived and designed the field surveys, performed the technical validation in the field, and as the principal archaeological expert on Maya culture and settlements, provided invaluable expertise and guidance on the annotation of man-made structures. J.Š. was responsible for the manual labelling process, and annotated over 12.000 structures. M.S. generated ALS visualizations, created corresponding binary masks from polygon annotations, performed tilling, anonymized the data, and split the dataset. A.D. processed the Sentinel time series. S.D. advised on the preparation of the dataset. All authors participated in writing and editing the text. All authors read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no conflict of interest. The funders had no role in the design of the study, in the collection, analyses, or interpretation of data, in the writing of the manuscript, or in the decision to publish the results.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kokalj, Ž., Džeroski, S., Šprajc, I. et al. Machine learning-ready remote sensing data for Maya archaeology. Sci Data 10, 558 (2023). https://doi.org/10.1038/s41597-023-02455-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41597-023-02455-x
This article is cited by
-
Convolutional neural networks for accurate identification of mining remains from UAV-derived images
Applied Intelligence (2023)
