
Abstract
We provide the raw acoustic data collected from the R/V Hesperides during the global Malaspina 2010 Spanish Circumnavigation Expedition (14th December 2010, Cádiz-14th July 2011, Cartagena) using a Simrad EK60 scientific echosounder operating at 38 and 120 kHz. The cruise was divided into seven legs: leg 1 (14th December 2010, Cádiz-13th January 2011, Rio de Janeiro), leg 2 (17th January 2011, Rio de Janeiro-6th February 2011, Cape Town), leg 3 (11th February 2011, Cape Town-13th March 2011, Perth), leg 4 (17th March 2011, Perth-30th March 2011, Sydney), leg 5 (16th April 2011, Auckland-8th May 2011, Honolulu), leg 6 (13th May 2011, Honolulu-10th June 2011, Cartagena de Indias) and leg 7 (19th June 2011, Cartagena de Indias-14th July 2011, Cartagena). The echosounder was calibrated at the start of the expedition and calibration parameters were updated in the data acquisition software (ER60) i.e., the logged raw data are calibrated. We also provide a data summary of the acoustic data in the form of post-processed products.
Measurement(s) | sound speed |
Technology Type(s) | echo sounder |
Factor Type(s) | time • depth • latitude • longitude |
Sample Characteristic - Organism | Metazoa |
Sample Characteristic - Environment | ocean biome • tropical • subtropical • temperate |
Sample Characteristic - Location | global |
Machine-accessible metadata file describing the reported data: https://doi.org/10.6084/m9.figshare.15097260
Similar content being viewed by others

Background & Summary
In the frame of fisheries assessment, echosounder data are routinely collected around the world1,2, and acoustic data are being used increasingly to study several different features of aquatic ecosystems3,4,5,6. However, there is still a disconnect between biological oceanography and fisheries research, and often cruises that sample the deep ocean (i.e., the mesopelagic zone from 200 to 1,000 m and beyond) do not collect echosounder data even if the instruments are available onboard.
The 2010 Malaspina circumnavigation expedition aimed at studying the biodiversity and the impact of global change on the deep ocean. The interdisciplinary project collected samples and data across multiple disciplines - from physics and chemistry to genomics and biodiversity7 - producing a number of new insights about the ocean8,9,10,11,12,13. Echosounder data collected during the Malaspina expedition have resulted in numerous publications related to mesopelagic fish biomass and behavior8,14,15,16. However, the data still contain a huge amount of information across a range of spatial (meters to oceans basin) and temporal (seconds to seasonal trends) scales that could be exploited in different ways: the objective of this paper is to provide adequate access to those data.
Methods
Figure 1 presents the track of the eight-month cruise, and Table 1 provides the detail of the legs and dates. On a routine basis R/V Hesperides sailed at an average speed of 11 knots from around 3 pm to 4 am (local time). The vessel arrived on station at around 4 am daily to carry out sampling operations at a fixed point for about 11 hours.

Cruise track and integrated backscatter at different stations (NASC, daytime 200 to 1000 m).
Acoustic measurements were carried out continuously using a Simrad EK60 echosounder), operating at 38 and 120 kHz (7° beamwidth transducers) with a ping rate of 0.5 Hz. Unfortunately, the 120 kHz failed during the first leg of the cruise and only 38 kHz data were collected. Echosounder observations were recorded down to 1000 m depth. The echosounder files are in the proprietary Simrad raw format and can be read by various softwares (e.g., LSSS, Echoview, Sonar5, MATECHO, ESP3, echopype, pyEcholab). GPS locations and calibration constants are imbedded in each file.
Additionally, daytime data integrated over 2 m vertical bins from 200 to 1000 m depth are provided as Nautical Area Scattering Coefficient (NASC). Each “voxel” is the average of all cleaned and validated data recorded over that depth range, in a time period starting 8 hours before the start of the station (defined as start of the CTD cast) and ending 8 hours after the start of the station, with only data recorded in the period between 1 hour after local sunrise and 1 hour prior to local sunset accepted (i.e., during local daytime hours, but removing crepuscular periods when vertical migration of biota is strong). The relatively long interval over which data were accepted around each station was chosen since the station sampling resulted in noisy acoustic data,, a long interval was therefore chosen to ensure valid data on all stations.
Finally, summaries of per station daytime and nighttime acoustic data (omitting data recorded within 1 hour of sunrise and sunset) are provided. The data fields in this file are station date, latitude and longitude, and per day and night average NASC 200–1000 m, average NASC 0–1000, weighted mean depth (WMD) of NASC 200–1000 m, migration amplitude, NASC day-to-night ratio and migration ratio.
Data Records
The raw data are available at PANGAEA (https://doi.org/10.1594/PANGAEA.92176017). The daytime data integrated over 2 m vertical bins are available at (https://doi.org/10.1594/PANGAEA.92308718) and the summary file is available at (https://doi.org/10.1594/PANGAEA.92661919).
Technical Validation
The echosounder was calibrated before departure (30th of November 2010, close to Mazarron port, water temperature ca. 17 °C) and values of the peak transducer gain (G0) and Simrad correction factor (Sa) for both frequencies were updated in the ER60 software following the standard target method20. Briefly, a 38.1 mm diameter tungsten carbide sphere was positioned under the vessel at a range of 12 m using nylon cable, and moved systematically through the acoustic beams of both transducers (38 and 120 kHz). The ER60 software compares measured values of the sphere’s target strength at each position in the beam with model predicted values, and estimates the transducers’ calibration parameters (G0, Sa and beam widths) for the given operational settings (see Table 2). Data are stored in raw proprietary Simrad format (.raw,.idx,.bot files).
Usage Notes
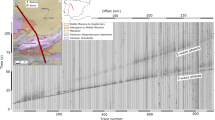
The main objective of this paper is to allow researchers full access to the data so they can analyze them with objectives that might be completely different from the ones they were collected for. Therefore, the raw data are provided so that each researcher may analyze them using the appropriate methodologies that will differ from those used in previous studies. However, we recommend paying attention to some of the specificities of the cruise that are important when filtering the data. In particular and depending on the objectives data should be filtered for noise following available techniques21,22,23. During the Malaspina expedition, on-station sampling took place from early morning to the beginning of the afternoon, whereas underway navigation occurred from the afternoon and through the night. Therefore, most of the daytime echo sounder data correspond to a stationary situation, and the level of noise is different from day to night (see materials and methods in Irigoien et al., 2014). The data were subjected to different types of noise along the survey. The most common noise was caused by the propeller and/or wave-hull collisions occurring at vessel speeds over 11 knots and were seen as long spikes on the echogram (example in Figs. 2 and 3, see also supplementary figure 7 in Irigoien et al.8 for filtering results). It is recommended to treat these data, especially for depths deeper than 100–200 m, using appropriate filters24. On some occasions, data collected near the coast, in shallow waters, presented interference from other acoustic equipment onboard. This was seen as typical short “flecks” present in pings separated by constant intervals, gradually increasing its range of appearance on the echogram. This type of noise can also be removed by means of impulsive noise filters24. Some parts of the data were also affected by bad weather conditions, this typically seen on the echogram as backscattering losses in some consecutive pings. This can also be treated with well-established filters as the attenuated signal removal. Another issue to be highlighted is that, due to technical problems in some small parts of the tracks, the 38 kHz frequency was in passive mode. Our previous work being focused in the mesopelagic, the 120 kHz data were not used. A preliminary analysis of the 120 kHz data showed to have a high noise to signal ratio. We have included them here as it is not possible to evaluate if useful for specific objectives or using different filtering approaches, however caution is recommended if using the 120 kHz data. Finally, 120 kHz data were not recorded during the first leg due to malfunctions of the transponder.

Example of echogram affected by noise (vertical spikes) for average vessel speed over 11 kn in Leg 2 (18/01/2011 22:06–22:46 h).

Example of echogram affected by interference from other acoustic equipment near the coast, in shallow waters, during Leg 4 (11/04/2011 21:26–22:04 h).
References
Planque, B. & Vaz, S. Understanding what controls the spatial distribution of fish populations using a multi-model approach. Fish. Oceanogr. 20, 1–17 (2011).
Horne, J. K. & Jech, J. M. Models, measures, and visualizations of fish backscatter. in Sounds in the sea: From ocean acoustics to acoustical oceanography (ed. Medwin, H.) 374–397 (Cambridge Univ. Press., 2005).
Eyring, C. F., Christensen, R. J. & Raitt, R. W. Reverberation in the Sea. J. Acoust. Soc. Am. 20, 462–475 (1948).
Koslow, J. A. The role of acoustics in ecosystem-based fishery management. ICES J. Mar. Sci. J. du Cons. fsp082 (2009).
Lezama-Ochoa, A. et al. Spatial patterns and scale-dependent relationships between macrozooplankton and fish in the Bay of Biscay: an acoustic study. Mar. Ecol. Ser. 439, 151–168 (2011).
Ariza, A., Garijo, J. C., Landeira, J. M. & Bordes, F. Progress in Oceanography Migrant biomass and respiratory carbon flux by zooplankton and micronekton in the subtropical northeast Atlantic Ocean (Canary Islands). Prog. Oceanogr. 134, 330–342 (2015).
Duarte, C. M. Seafaring in the 21st century: the Malaspina 2010 circumnavigation expedition. Limnol. Oceanogr. Bull. 24, 11–14 (2015).
Irigoien, X. et al. Large mesopelagic fishes biomass and trophic efficiency in the open ocean. Nat. Commun. 5 (2014).
Cózar, A. et al. Plastic debris in the open ocean. Proc. Natl. Acad. Sci. USA 111 (2014).
de Puelles, M. L. F. et al. Zooplankton abundance and diversity in the tropical and subtropical ocean. Diversity 11 (2019).
Villarino, E. et al. Large-scale ocean connectivity and planktonic body size. Nat. Commun. 9 (2018).
Hernández-León, S. et al. Large deep-sea zooplankton biomass mirrors primary production in the global ocean. Nat. Commun. 11, 1–8 (2020).
Duarte, C. M. et al. Sequencing effort dictates gene discovery in marine microbial metagenomes. Environ. Microbiol. 22, 4589–4603 (2020).
Klevjer, T. A. et al. Large scale patterns in vertical distribution and behaviour of mesopelagic scattering layers. Sci. Rep. 6 (2016).
Prihartato, P. K., Irigoien, X., Genton, M. G. & Kaartvedt, S. Global effects of moon phase on nocturnal acoustic scattering layers. Mar. Ecol. Prog. Ser. 544 (2016).
Aksnes, D. L. et al. Light penetration structures the deep acoustic scattering layers in the global ocean. Sci. Adv. 3, e1602468 (2017).
Martinez, U. et al. Raw EK60 echosounder data (38 and 120 kHz) collected during the Malaspina 2010 Spanish Circumnavigation Expedition (14th December 2010, Cádiz - 14th July 2011, Cartagena). PANGAEA https://doi.org/10.1594/PANGAEA.921760 (2020).
Klevjer, T. A. et al. Integrated daytime EK60 echosounder data from Malaspina-2010 cruise. PANGAEA https://doi.org/10.1594/PANGAEA.923087 (2020).
Klevjer, T. A. et al. Per station summaries of acoustic water column properties during MALASPINA-2010. PANGAEA https://doi.org/10.1594/PANGAEA.926619 (2021).
Demer, D. A. et al. Calibration of acoustic instruments. ICES Cooperative Research Report No 326 https://doi.org/10.25607/OBP-185 (2015).
Saunders, R. A. et al. Predatory impact of the myctophid fish community on zooplankton in the Scotia Sea (Southern Ocean). Mar. Ecol. Prog. Ser. 541, 45–64 (2015).
Watkins, J. L. & Brierley, A. S. A post-processing technique to remove background noise from echo integration data. ICES J. Mar. Sci. 53, 339–344 (1996).
Socha, D. G., Watkins, J. L. & Brierley, A. S. A visualization-based post-processing system for analysis of acoustic data. ICES J. Mar. Sci. 53, 335–338 (1996).
Ryan, T. E., Downie, R. A., Kloser, R. J. & Keith, G. Reducing bias due to noise and attenuation in open-ocean echo integration data. ICES J. Mar. Sci. 72, 2482–2493 (2015).
Acknowledgements
Thanks are due to all participants in the cruise, particularly the UTM responsible for the operation of the instruments on board, and crew of the R/V Hesperides. The Malaspina Expedition was funded by the Spanish Ministry of Economy and Competitiveness through the Malaspina 2010 expedition project (Consolider-Ingenio 2010, CSD2008-00077), the Fundación BBVA, CSIC, the Spanish Institute of Oceanography, AZTI Foundation, the universities of Granada, Cadiz, Basque Country and Barcelona and the King Abdullah University of Science and Technology. Data have been made available through the EU funded project SUMMER (H2020-BG-2018-2, proposal number: 817806-2).
Author information
Authors and Affiliations
Contributions
X.I. and C.M.D. designed the study and survey. U.M. and G.B. collected the data. T.K., A.R. and S.K. analyzed the data and produced the summary files. R.P. and A.S.B. organized the collection and upload of data. A.C.W. created the machine-readable files and assured the coherence between the different data.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
The Creative Commons Public Domain Dedication waiver http://creativecommons.org/publicdomain/zero/1.0/ applies to the metadata files associated with this article.
About this article

Cite this article
Irigoien, X., Klevjer, T., Martinez, U. et al. The Simrad EK60 echosounder dataset from the Malaspina circumnavigation. Sci Data 8, 259 (2021). https://doi.org/10.1038/s41597-021-01038-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41597-021-01038-y
This article is cited by
-
Kayak-based low-cost hydrographic surveying system: A demonstration in high altitude proglacial lake associated with Drang Drung Glacier, Zanskar Himalaya
Journal of Earth System Science (2023)
-
Global decline of pelagic fauna in a warmer ocean
Nature Climate Change (2022)
