
Abstract
Soft materials capable of transforming between three-dimensional (3D) shapes in response to stimuli such as light, heat, solvent, electric and magnetic fields have applications in diverse areas such as flexible electronics1,2, soft robotics3,4 and biomedicine5,6,7. In particular, magnetic fields offer a safe and effective manipulation method for biomedical applications, which typically require remote actuation in enclosed and confined spaces8,9,10. With advances in magnetic field control11, magnetically responsive soft materials have also evolved from embedding discrete magnets12 or incorporating magnetic particles13 into soft compounds to generating nonuniform magnetization profiles in polymeric sheets14,15. Here we report 3D printing of programmed ferromagnetic domains in soft materials that enable fast transformations between complex 3D shapes via magnetic actuation. Our approach is based on direct ink writing16 of an elastomer composite containing ferromagnetic microparticles. By applying a magnetic field to the dispensing nozzle while printing17, we reorient particles along the applied field to impart patterned magnetic polarity to printed filaments. This method allows us to program ferromagnetic domains in complex 3D-printed soft materials, enabling a set of previously inaccessible modes of transformation, such as remotely controlled auxetic behaviours of mechanical metamaterials with negative Poisson’s ratios. The actuation speed and power density of our printed soft materials with programmed ferromagnetic domains are orders of magnitude greater than existing 3D-printed active materials. We further demonstrate diverse functions derived from complex shape changes, including reconfigurable soft electronics, a mechanical metamaterial that can jump and a soft robot that crawls, rolls, catches fast-moving objects and transports a pharmaceutical dose.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$29.99 / 30 days
cancel any time
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout




Similar content being viewed by others

References
Ma, M., Guo, L., Anderson, D. G. & Langer, R. Bio-inspired polymer composite actuator and generator driven by water Gradients. Science 339, 186–189 (2013).
Zarek, M. et al. 3D printing of shape memory polymers for flexible electronic devices. Adv. Mater. 28, 4449–4454 (2016).
Wehner, M. et al. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 536, 451–455 (2016).
Park, S. J. et al. Phototactic guidance of a tissue-engineered soft-robotic ray. Science 353, 158–162 (2016).
Zhao, X. H. et al. Active scaffolds for on-demand drug and cell delivery. Proc. Natl Acad. Sci. USA 108, 67–72 (2011).
Fusco, S. et al. An integrated microrobotic platform for on-demand, targeted therapeutic interventions. Adv. Mater. 26, 952–957 (2014).
Davis, K. A., Burke, K. A., Mather, P. T. & Henderson, J. H. Dynamic cell behavior on shape memory polymer substrates. Biomaterials 32, 2285–2293 (2011).
Erb, R. M., Martin, J. J., Soheilian, R., Pan, C. & Barber, J. R. Actuating soft matter with magnetic torque. Adv. Funct. Mater. 26, 3859–3880 (2016).
Hines, L., Petersen, K., Lum, G. Z. & Sitti, M. Soft actuators for small-scale robotics. Adv. Mater. 29, 1603483 (2017).
Martel, S. Beyond imaging: macro-and microscale medical robots actuated by clinical MRI scanners. Science Robotics 2, eaam8119 (2017).
Rahmer, J., Stehning, C. & Gleich, B. Spatially selective remote magnetic actuation of identical helical micromachines. Science Robotics 2, eaal2845 (2017).
Boncheva, M. et al. Magnetic self-assembly of three-dimensional surfaces from planar sheets. Proc. Natl Acad. Sci. USA 102, 3924–3929 (2005).
Kim, J., Chung, S., Choi, S., Lee, H. & Kwon, S. Programming magnetic anisotropy in polymeric microactuators. Nat. Mater. 10, 747–752 (2011).
Lum, G. Z. et al. Shape-programmable magnetic soft matter. Proc. Natl Acad. Sci. USA 113, E6007–E6015 (2016).
Hu, W., Lum, G. Z., Mastrangeli, M. & Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 554, 81–85 (2018).
Lewis, J. A. Direct ink writing of 3D functional materials. Adv. Funct. Mater. 16, 2193–2204 (2006).
Kokkinis, D., Schaffner, M. & Studart, A. R. Multimaterial magnetically assisted 3D printing of composite materials. Nat. Commun. 6, 8643 (2015).
Silverberg, J. L. et al. Using origami design principles to fold reprogrammable mechanical metamaterials. Science 345, 647–650 (2014).
Yuan, C. et al. 3D printed reversible shape changing soft actuators assisted by liquid crystal elastomers. Soft Matter 13, 5558–5568 (2017).
Ware, T. H., McConney, M. E., Wie, J. J., Tondiglia, V. P. & White, T. J. Voxelated liquid crystal elastomers. Science 347, 982–984 (2015).
Oyefusi, A. & Chen, J. Reprogrammable chemical 3D shaping for origami, kirigami, and reconfigurable molding. Angew. Chem. 129, 8362–8365 (2017).
Zhao, Z. et al. Origami by frontal photopolymerization. Sci. Adv. 3, e1602326 (2017).
Na, J. H. et al. Programming reversibly self-folding origami with micropatterned photo-crosslinkable polymer trilayers. Adv. Mater. 27, 79–85 (2015).
Xu, S. et al. Assembly of micro/nanomaterials into complex, three-dimensional architectures by compressive buckling. Science 347, 154–159 (2015).
Zhang, Y. H. et al. A mechanically driven form of kirigami as a route to 3D mesostructures in micro/nanomembranes. Proc. Natl Acad. Sci. USA 112, 11757–11764 (2015).
Babaee, S. et al. 3D soft metamaterials with negative Poisson’s ratio. Adv. Mater. 25, 5044–5049 (2013).
Ding, Z. et al. Direct 4D printing via active composite materials. Sci. Adv. 3, e1602890 (2017).
Kim, J., Hanna, J. A., Byun, M., Santangelo, C. D. & Hayward, R. C. Designing responsive buckled surfaces by halftone gel lithography. Science 335, 1201–1205 (2012).
Ge, Q. et al. Multimaterial 4D printing with tailorable shape memory polymers. Sci. Rep. 6, 31110 (2016).
Gladman, A. S., Matsumoto, E. A., Nuzzo, R. G., Mahadevan, L. & Lewis, J. A. Biomimetic 4D printing. Nat. Mater. 15, 413–418 (2016).
Fu, H. et al. Morphable 3D mesostructures and microelectronic devices by multistable buckling mechanics. Nat. Mater. 17, 268–276 (2018).
Zhang, Q., Zhang, K. & Hu, G. Smart three-dimensional lightweight structure triggered from a thin composite sheet via 3D printing technique. Sci. Rep. 6, 22431 (2016).
Mirfakhrai, T., Madden, J. D. & Baughman, R. H. Polymer artificial muscles. Mater. Today 10, 30–38 (2007).
Illeperuma, W. R., Sun, J.-Y., Suo, Z. & Vlassak, J. J. Force and stroke of a hydrogel actuator. Soft Matter 9, 8504–8511 (2013).
Huang, L. M. et al. Ultrafast digital printing toward 4D shape changing materials. Adv. Mater. 29, 1605390 (2017).
Bakarich, S. E., Gorkin, R., Panhuis, M. h. & Spinks, G. M. 4D printing with mechanically robust, thermally actuating hydrogels. Macromol. Rapid Commun. 36, 1211–1217 (2015).
Wu, J. et al. Multi-shape active composites by 3D printing of digital shape memory polymers. Sci. Rep. 6, 24224 (2016).
Ambulo, C. P. et al. Four-dimensional printing of liquid crystal elastomers. ACS Appl. Mater. Interfaces 9, 37332–37339 (2017).
Kotikian, A., Truby, R. L., Boley, J. W., White, T. J. & Lewis, J. A. 3D printing of liquid crystal elastomeric actuators with spatially programed nematic order. Adv. Mater. 30, 1706164 (2018).
Li, W. et al. Flexible circuits and soft actuators by printing assembly of graphene. ACS Appl. Mater. Interfaces 8, 12369–12376 (2016).
Acknowledgements
We thank D. Bono for help in magnetic characterizations. This work is supported by the National Science Foundation (CMMI-1661627) and the Office of Naval Research (N00014-17-1-2920) and the MIT Institute for Soldier Nanotechnologies. Y.K. acknowledges financial support from Harvard-MIT Division of Health Sciences and Technology. H.Y. acknowledges financial support from a Samsung Scholarship.
Author information
Authors and Affiliations
Contributions
Y.K., H.Y., R.Z. and X.Z. designed the study and interpreted the results. H.Y., Y.K. and X.Z. conceived the idea of printing ferromagnetic domains. H.Y. and X.Z. developed the 3D printing platform. Y.K. and H.Y. developed materials and methods of printing and performed material characterizations. Y.K. designed and fabricated the printed structures and demonstrated their functions. X.Z., R.Z. and Y.K. developed the theory for soft materials with ferromagnetic domains, R.Z. and S.A.C. implemented the numerical models, and R.Z. performed the simulations. Y.K., H.Y. and R.Z. produced the figures and videos. Y.K. and X.Z. wrote the manuscript with input from all authors. X.Z. supervised the study.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Extended data figures and tables
Extended Data Fig. 1 Scanning electron microscope images of NdFeB and fumed silica particles and printed fibres.
a, Magnetizable microparticles of NdFeB alloy in flake-like shapes with an average size of 5 µm. b, Fumed silica nanoparticles with an average size of 30 nm. c–f, Fibres printed using nozzles with diameters of 50 µm (c), 100 µm (d), 200 µm (e), and 410 µm (f). g, The ratio between the printed fibre and the nozzle diameter, which is called the die-swelling ratio, plotted against the nozzle diameter.
Extended Data Fig. 2 Mechanical characterizations of the ink and the printed materials.
a, b, Apparent viscosity as a function of applied shear rate (a) and storage modulus as a function of applied shear stress (b) for 20 vol% magnetized ink (red), 20 vol% nonmagnetized ink (black) and support ink (grey). c, Nominal tensile stress–stretch curves (solid lines) for specimens printed with the magnetic ink in the absence of external fields (black), with applied magnetic fields of 50 mT (red) at the nozzle tip generated by a permanent magnet, and the elastomer matrix with no magnetic particles (blue). The shear modulus µ of each material was obtained by fitting the experimental curves to a neo-Hookean model (dashed lines).
Extended Data Fig. 3 Micro-computed tomography images of printed fibres.
a, A fibre printed with a nozzle of diameter 410 µm in the absence of applied magnetic field. b, A fibre printed with a nozzle of diameter 410 µm in the presence of an applied magnetic field of 50 mT at the nozzle tip. No obvious aggregation of ferromagnetic particles in the printed fibres can be observed.
Extended Data Fig. 4 Experimental validation of the magnetization induced during printing under the applied magnetic field.
a, Experimental setup with a vibrating sample magnetometer for measuring the magnetization of a sample printed with a nozzle of diameter 410 µm under the presence of magnetic field of 50 mT at the nozzle tip. b, Magnetization values measured at various angular positions of the printed fibres with respect to the external magnetic field applied by the vibrating sample magnetometer.
Extended Data Fig. 5 Magnetic moment densities of printed samples with different NdFeB particle volume fractions.
For printed specimens at each volume fraction, a permanent magnet is used to generate external fields (50 mT at the nozzle tip). The magnetization values of printed samples (red) are compared with the maximum achievable magnetization values (black) measured from uniformly magnetized samples. The uniformly magnetized samples are printed in the absence of external fields, cured, and then magnetized under impulsive fields (about 2.7 T). Printing under the applied field of 50 mT yields a magnetic moment density that corresponds to 63%–64% of the maximum achievable magnetization at each volume fraction of NdFeB particles.
Extended Data Fig. 6 Schematic designs and dimensions of the two-dimensional and 3D structures in Figs. 2 and 3.
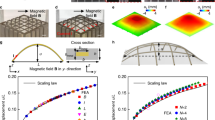
a, An annulus encoded with alternating domains that are equidistant. b, An annulus encoded with alternating domains that vary in size. c, A Miura-ori fold encoded with alternating oblique patterns of ferromagnetic domains. d, A hollow cross encoded with alternating ferromagnetic domains along the perimeter. e, f, Quadrupedal (e) and hexapedal (f) structures enabled by folding of the magnetically active segments surrounding the magnetically inactive segments. g, Two adjoining hexagonal tubes programmed to form undulating surfaces under applied magnetic fields. h, A pyramid-shaped thin-walled structure programmed to elongate in its diagonal direction along applied magnetic fields. i–k, A set of auxetic structures (with negative Poisson’s ratios) programmed to shrink in both length and width under applied magnetic fields. The dimensions in this figure are given in millimetres.
Extended Data Fig. 7 Overall fabrication process of printing multilayered structures assisted by the use of support inks.
a, Printing multilayered hexagonal arrays using magnetic and support inks. The use of support inks as fugitive buttresses enables stacking the deposited magnetic inks stably up to tens or even hundreds of layers. b, Chemical composition of magnetic and support inks. The higher concentration of catalyst in the support ink prevents diffusion of catalyst molecules through the interface and thus prevents imperfect curing of the adjacent magnetic inks. Δc denotes the difference in catalyst concentration between the support and magnetic inks. c, The printed magnetic inks are cured by heating at 120 °C for 1 h. The support ink is then removed by solvent rinses.
Extended Data Fig. 8 Actuation performance of 3D-printed shape-programmable soft materials.
a, Energy density and actuation rate of our magnetically responsive structures presented in Figs. 1–3 are plotted and compared with those of existing 3D-printed shape-programmable soft materials in the literature27,28,29,30,32,35,36,37,38,39,40. b, Power density is calculated as energy density multiplied by the actuation rate of each material and plotted for comparison; the materials are listed in order of increasing power densities. PNIPAAm = poly(N-isopropylacrylamide); PMBA = poly(benzyl methacrylate); PHEMA = poly(hydroxyl ethyl methacrylate); PLA = poly(lactic acid); RM82 = 1,4-bis-[4-(6-acryloyloxhexyloxy)benzoyloxy]-2-methylbenzene. TangoBlack and VeroClear are commercially available acrylic photocurable polymers from Stratasys Ltd.
Extended Data Fig. 9 Schematic designs and working principles of the reconfigurable soft electronic device demonstrated in Fig. 4a.
a, Exploded and bottom views of the printed device, in which soft electronic circuitry and components are embedded by means of a hybrid fabrication process based on multimaterial 3D printing. b, Two different shapes depending on the direction of applied magnetic fields of 30 mT, which yield different electronic functions (red micro-LEDs lit up in Mode 1 and green micro-LEDs lit up in Mode 2). c, Schematic diagram of the embedded soft electronic circuits, which are designed to turn active only in the designated mode of transformation owing to the selective contact with the gold electrode on the substrate.
Extended Data Fig. 10 Schematic illustrations of the methods for applying magnetic fields to actuate the printed structures.
a, b, The magnetic fields for actuating the printed structures can be applied in two ways. A pair of electromagnetic coils are used to generate a uniform magnetic field (a). A NdFeB magnet (width 2 in, length 3 in, thickness 0.5 in, surface flux density 300 mT) is used to create spatially varying magnetic fields for dynamic actuation by combining vertical, horizontal and rotational movements of the magnet (b).
Supplementary information
Supplementary Information
This file contains Supplementary Text and Data, and Supplementary Figure 1.
Video 1 Fast transformation of a straight line with an alternating magnetization pattern.
A straight line printed with an alternating magnetization pattern rapidly transforms into an ‘m’ shape under the applied magnetic field and quickly reverts to its original shape upon removal of the applied field.
Video 2 Complex shape changes of various two-dimensional planar structures with programmed ferromagnetic domains under applied magnetic fields.
Various two-dimensional planar structures, including two annular rings with equidistant and varying -magnitude alternating magnetization patterns, a Miura-ori pattern, a hollow cross and quadrupedal and hexapedal structures, exhibit fast and reversible transformations via magnetic actuations.
Video 3 Overall process of printing a multi-layered, 3D elastomeric structure with programmed ferromagnetic domains.
This video shows the overall process of (i) printing a 3D construct with programmed magnetic domains, assisted by the use of support ink and (ii) actuating the printed structure by magnetic fields.
Video 4 Complex shape changes of various 3D structures with programmed ferromagnetic domains under applied magnetic fields.
Various 3D structures, including two adjoining hexagonal tubes with high aspect ratios and a pyramid-shaped thin-walled construct, exhibit fast and reversible transformations via magnetic actuations.
Video 5 Various 3D auxetic structures with programmed ferromagnetic domains, showing negative Poisson’s ratios.
Various 3D auxetic structures, or mechanical metamaterials, exhibit fast shrinkage and recovery in both length and width via magnetic actuation.
Video 6 Demonstration of a reconfigurable soft electronic device based on the annular ring structure with alternating ferromagnetic domains.
The reconfigurable electronic device exhibits different electronic functions depending on the direction of applied magnetic fields.
Video 7 Demonstration of interactions with an object using the programmed shape changes.
The hexapedal structure exhibits a diverse set of interactions, including stopping, catching, holding and releasing of a glass ball, under applied magnetic fields.
Video 8 Rolling-based locomotion of the hexapedal structure and delivery of a drug pill under a rotating magnetic field.
The hexapedal structure wraps its body and rotates along a horizontal axis under a rotating magnetic field to create rolling-based locomotion, which allows the hexapedal structure to move forwards and backwards depending on the rolling direction.
Video 9 Horizontal leap of a 3D auxetic structure based on drastic release of the elastic and magnetic potential energies.
Sudden reversal of the applied field direction while attenuating the strength triggers drastic release of the combined elastic and magnetic potential energies that are converted to kinetic energy, creating a horizontal leap of the demonstrated 3D auxetic structure.
Rights and permissions
About this article

Cite this article
Kim, Y., Yuk, H., Zhao, R. et al. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 558, 274–279 (2018). https://doi.org/10.1038/s41586-018-0185-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/s41586-018-0185-0
This article is cited by
-
Stenus-inspired, swift, and agile untethered insect-scale soft propulsors
Nature Communications (2024)
-
Programming structural and magnetic anisotropy for tailored interaction and control of soft microrobots
Communications Engineering (2024)
-
Active electronic skin: an interface towards ambient haptic feedback on physical surfaces
npj Flexible Electronics (2024)
-
Magnetic steering continuum robot for transluminal procedures with programmable shape and functionalities
Nature Communications (2024)
-
Self-regulated underwater phototaxis of a photoresponsive hydrogel-based phototactic vehicle
Nature Nanotechnology (2024)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
