
Abstract
The hygroscopic deformation of pine cones, featured by opening and closing their scales depending on the environmental humidity, is a well-known stimuli-responsive model system for artificial actuators. However, it has not been noted that the deformation of pine cones is an ultra-slow process. Here, we reveal that vascular bundles with unique parallelly arranged spring/square microtubular heterostructures dominate the hygroscopic movement, characterized as ultra-slow motion with the outer sclereids. The spring microtubes give a much larger hygroscopic deformation than that of the square microtubes along the longitudinal axis direction, which bends the vascular bundles and consequently drives the scales to move. The outer sclereids with good water retention enable the vascular-bundle-triggered deformation to proceed ultra-slowly. Drawing inspiration, we developed soft actuators enabling controllable yet unperceivable motion. The motion velocity is almost two orders of magnitude lower than that of the same-class actuators reported, which made the as-developed soft actuators applicable in camouflage and reconnaissance.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$29.99 / 30 days
cancel any time
Subscribe to this journal
Receive 12 print issues and online access
$259.00 per year
only $21.58 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout





Similar content being viewed by others


Data availability
The data supporting the findings of this study are available within the Article and its Supplementary Information. Other raw data generated during this study are available from the corresponding authors upon reasonable request. Source data are provided with this paper.
References
Dawson, J., Vincent, J. F. V. & Rocca, A. M. How pine cones open. Nature 390, 668 (1997).
Elbaum, R., Zaltzman, L., Burgert, I. & Fratzl, P. The role of wheat awns in the seed dispersal unit. Science 316, 884–886 (2007).
Huss, J. C. et al. Climate-dependent heat-triggered opening mechanism of Banksia seed pods. Adv. Sci. 5, 1700572 (2018).
Armon, S., Efrati, E., Kupferman, R. & Sharon, E. Geometry and mechanics in the opening of chiral seed pods. Science 333, 1726–1730 (2011).
Harrington, M. J. et al. Origami-like unfolding of hydro-actuated ice plant seed capsules. Nat. Commun. 2, 337 (2011).
Abraham, Y. et al. Tilted cellulose arrangement as a novel mechanism for hygroscopic coiling in the stork’s bill awn. J. R. Soc. Interface 9, 640–647 (2012).
Lv, J. et al. Photocontrol of fluid slugs in liquid crystal polymer microactuators. Nature 537, 179–184 (2016).
Yu, Y., Nakano, M. & Ikeda, T. Directed bending of a polymer film by light. Nature 425, 145 (2003).
Qian, X. et al. Artificial phototropism for omnidirectional tracking and harvesting of light. Nat. Nanotechnol. 14, 1048–1055 (2019).
Qin, H., Zhang, T., Li, N., Cong, H. & Yu, S. Anisotropic and self-healing hydrogels with multi-responsive actuating capability. Nat. Commun. 10, 2202 (2019).
Wang, Y. et al. Repeatable and reprogrammable shape morphing from photoresponsive gold nanorod/liquid crystal elastomers. Adv. Mater. 32, 2004270 (2020).
Zhao, Y. et al. Soft phototactic swimmer based on self-sustained hydrogel oscillator. Sci. Robot. 4, eaax7112 (2019).
Erb, R. M., Sander, J. S., Grisch, R. & Studart, A. R. Self-shaping composites with programmable bioinspired microstructures. Nat. Commun. 4, 1712 (2013).
Quan, H., Kisailus, D. & Meyers, M. A. Hydration-induced reversible deformation of biological materials. Nat. Rev. Mater. 6, 264–283 (2021).
Arslan, H., Nojoomi, A., Jeon, J. & Yum, K. 3D printing of anisotropic hydrogels with bioinspired motion. Adv. Sci. 6, 1800703 (2019).
Poppinga, S. et al. Toward a new generation of smart biomimetic actuators for architecture. Adv. Mater. 30, 1703653 (2018).
Gladman, A. S., Matsumoto, E. A., Nuzzo, R. G., Mahadevan, L. & Lewis, J. A. Biomimetic 4D printing. Nat. Mater. 15, 413–418 (2016).
Fratzl, P. & Barth, F. G. Biomaterial systems for mechanosensing and actuation. Nature 462, 442–448 (2009).
Opdenbosch, D. V., Fritz-Popovski, G., Wagermaier, W., Paris, O. & Zollfrank, C. Moisture-driven ceramic bilayer actuators from a biotemplating approach. Adv. Mater. 28, 5235–5240 (2016).
Song, K. & Lee, S. J. Pine cone scale-inspired motile origami. npg Asia Mater. 9, e389 (2017).
Skotheim, J. M. & Mahadevan, L. Physical limits and design principles for plant and fungal movements. Science 308, 1308–1310 (2005).
Rafsanjani, A., Brule, V., Western, T. L. & Pasini, D. Hydro-responsive curling of the resurrection plant Selaginella lepidophylla. Sci. Rep. 5, 8064 (2015).
Zhang, P. et al. Evaluating the hierarchical, hygroscopic deformation of the Daucus carota umbel through structural characterization and mechanical analysis. Acta Biomater. 99, 457–468 (2019).
Sharpe, D. M. & Fields, D. E. Integrating the effects of climate and seed fall velocities on seed dispersal by wind: a model and application. Ecol. Model. 17, 297–310 (1982).
Shaw, G. R. The Genus Pinus (Riverside Press, 1914).
Harlow, W. M., Côté, W. A. Jr & Day, A. C. The opening mechanism of pine cone scales. J. For. 62, 538–540 (1964).
Allen, R. & Wardrop, A. The opening and shedding mechanism of the female cones of Pinus radiata. Aust. J. Bot. 12, 125–134 (1964).
Thompson, N. S. Response of pine cone scales to changes in moisture content. Holzforschung 22, 124–125 (1968).
Quan, H. C., Pirosa, A., Yang, W., Ritchie, R. O. & Meyers, M. A. Hydration-induced reversible deformation of the pine cone. Acta Biomater. 128, 370–383 (2021).
Eger, C. J. et al. The structural and mechanical basis for passive-hydraulic pine cone actuation. Adv. Sci. 9, 2200458 (2022).
Shin, B. et al. Hygrobot: a self-locomotive ratcheted actuator powered by environmental humidity. Sci. Robot. 3, eaar2629 (2018).
Liu, Y. et al. Humidity- and photo-induced mechanical actuation of cross-linked liquid crystal polymers. Adv. Mater. 29, 1604792 (2017).
Zhang, Y. L. et al. Quantum-confined-superfluidics-enabled moisture actuation based on unilaterally structured graphene oxide papers. Adv. Mater. 31, 1901585 (2019).
Ma, J. N. et al. Programmable deformation of patterned bimorph actuator swarm. Natl Sci. Rev. 7, 775–785 (2020).
Chen, X. et al. Scaling up nanoscale water-driven energy conversion into evaporation-driven engines and generators. Nat. Commun. 6, 7346 (2015).
Ma, Y. et al. Polyelectrolyte multilayer films for building energetic walking devices. Angew. Chem. Int. Ed. 50, 6254–6257 (2011).
Cao, J. et al. Arbitrarily 3D configurable hygroscopic robots with a covalent–noncovalent interpenetrating network and self-healing ability. Adv. Mater. 31, 1900042 (2019).
Zhao, Z. et al. Actuation and locomotion driven by moisture in paper made with natural pollen. Proc. Natl Acad. Sci. USA 117, 8711–8718 (2020).
Blanchette, A., Becza, N. & Saporito, R. A. Escape behaviour of aposematic (Oophaga pumilio) and cryptic (Craugastor sp.) frogs in response to simulated predator approach. J. Trop. Ecol. 33, 165–169 (2017).
Silva, S. M., Clozato, C. L., Moraes-Barros, N. & Morgante, J. S. Towards a standard framework to describe behaviours in the common-sloth (Bradypus variegatus Schinz, 1825): novel interactions data observed in distinct fragments of the Atlantic forest, Brazil. Braz. J. Biol. 73, 527–531 (2013).
Macuda, T., Allison, R. S., Thomas, P., Craig, G. & Jennings, S. Detection of motion-defined form under simulated night vision conditions. In Proc. SPIE 5442, Helmet- and Head-Mounted Displays IX: Technologies and Applications (eds Rash, C. E. & Reese, C. E.) 36–44 (International Society for Optics and Photonics, 2004).
Yao, L. & Ishii, H. in Robotic Systems and Autonomous Platforms (eds Walsh, S. M. & Strano, M. S.) 41–57 (Woodhead Publishing, 2019).
Burgert, I., Eder, M., Gierlinger, N. & Fratzl, P. Tensile and compressive stresses in tracheids are induced by swelling based on geometrical constraints of the wood cell. Planta 226, 981–987 (2007).
Timoshenko, S. Analysis of bi-metal thermostats. J. Opt. Soc. Am. 11, 233–255 (1925).
Reyssat, E. & Mahadevan, L. Hygromorphs: from pine cones to biomimetic bilayers. J. R. Soc. Interface 6, 951–957 (2009).
Le, X., Lu, W., Zhang, J. & Chen, T. Recent progress in biomimetic anisotropic hydrogel actuators. Adv. Sci. 6, 1801584 (2019).
Wang, Y. et al. Directional transport of centimeter-scale object on anisotropic microcilia surface under water. Sci. China Mater. 62, 236–244 (2019).
Park, B. et al. Cuticular pad–inspired selective frequency damper for nearly dynamic noise–free bioelectronics. Science 376, 624–629 (2022).
Wu, Y. et al. Biomimetic supramolecular fibers exhibit water-induced supercontraction. Adv. Mater. 30, 1707169 (2018).
Chen, H. et al. Hygroresponsive torsional yarns and actuators based on cascade amplification of the deformation. Macromol. Mater. Eng. 306, 2000822 (2021).
Okuzaki, H., Kuwabara, T., Funasaka, K. & Saido, T. Humidity-sensitive polypyrrole films for electro-active polymer actuators. Adv. Funct. Mater. 23, 4400–4407 (2013).
Fang, B. et al. Handedness-controlled and solvent-driven actuators with twisted fibers. Mater. Horiz. 6, 1207–1214 (2019).
Treml, B. E. et al. Autonomous motility of polymer films. Adv. Mater. 30, 1705616 (2018).
Han, D. D. et al. Bioinspired graphene actuators prepared by unilateral UV irradiation of graphene oxide papers. Adv. Funct. Mater. 25, 4548–4557 (2015).
Lee, S. W. et al. Bioinspired hygromorphic actuator exhibiting controlled locomotion. ACS Macro Lett. 2, 960–965 (2013).
Han, D. D. et al. Moisture-responsive graphene paper prepared by self-controlled photoreduction. Adv. Mater. 27, 332–338 (2015).
Lutz-Bueno, V., Bolisetty, S., Azzari, P., Handschin, S. & Mezzenga, R. Self-winding gelatin–amyloid wires for soft actuators and sensors. Adv. Mater. 32, 2004941 (2020).
Cheng, H. et al. Graphene fibers with predetermined deformation as moisture-triggered actuators and robots. Angew. Chem. Int. Ed. 52, 10482–10486 (2013).
Ghavami, P. Mechanics of Materials: An Introduction to Engineering Technology 113–114 (Springer, 2015).
Acknowledgements
S.W. acknowledges the support of the National Natural Science Foundation of China (grant numbers 22035008 and 21972155). H.L. acknowledges the support of the National Natural Science Foundation of China (grant number 22125201). L.J. acknowledges the support of the National Natural Science Foundation of China (grant number 21988102).
Author information
Authors and Affiliations
Contributions
S.W., F.Z., M.Y. and H.L. contributed to the experimental design and data analysis. M.Y. and F.Z. carried out the motion observations and mechanical characterization. S.W. proposed the simplified heterostructured spring/square microtube model. F.Z. performed the equivalent calculation of the thickness and fabricated the 3D-printed actuators. F.Z. and M.Y. conducted the motion observations of the 3D-printed actuators. M.Y. performed the theoretical analysis and the characterizations using XCT, SEM and ESEM. X.X. performed the numerical simulations of the fluid field. X.L. contributed to the ESEM characterization. F.Z., M.Y., H.L. and S.W. wrote the manuscript. L.J. gave helpful suggestions. All the authors contributed to discussing and revising the manuscript. S.W. conceived and supervised the project.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Materials thanks Cecilia Laschi and the other, anonymous, reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Extended data
Extended Data Fig. 1 The slow movement of the scale.
a, b, Optical (a) and CT (b) images show that the scales are composed of VBs (assembled as skeleton) embedded in the skin. c, The dehydration process of the waterlogged whole scale, skin, skeleton, and VB in air. The solid line represents mean values, and the shaded region represents the standard deviation from three repeated experiments.
Extended Data Fig. 2 Hygroscopic geometric reshaping of the scale, skin, skeleton and VB.
a, It takes around 50, 50, 10 and 3 min for the scale, skin, skeleton and VB to reach equilibrium underwater and around 210, 210, 100 and 15 min to reach equilibrium in air, respectively. b, Deformation curves of the scale, skin, skeleton and VB underwater characterized by the changes of the tip - tail distance l/l0 (left) and the tilt angle θ (right). The whole scale and skeleton show steady motion. However, the skin fluctuates for a long time before starting a steady bending as indicated by the curve of θ versus time. The solid line represents mean values, and the shaded region represents the standard deviation from three repeated experiments.
Extended Data Fig. 3 SEM image of the spring and square microtubes.
a,b, The spring structure in spring microtubes is independent, which can be easy distinguished from the soundings. c-f, The spring structure makes the microtube stretchable. g-i, The square tubes exhibit a continuous and dense wall.
Extended Data Fig. 4 Hygroscopic expansion behavior of the spring and square microtubes characterized by ESEM.
The spring microtubes (a) obviously extend along the long axis with the increase of RH, while the square microtube (b) is almost unchanged.
Extended Data Fig. 5 The bending degree and mechanical properties of the 3D-printed spring/square (○/□) pillar couples with different thickness ratio h○/□.
a, With the decrease of h○/□, it becomes difficult for the couple to bend underwater. All the couples reach an equilibrium state at around 90 min. b, The hygroscopic expansion rate of the spring pillar is obviously larger than that of the square pillar and their difference increases with increased immersed time underwater. c, The Young’s modulus of the spring pillar decreases with increased immersed time underwater. d, The Young’s modulus of the square pillars (immersed underwater for 90 min) decreases with the increased thickness. The data are presented as mean ± s.d. of n = 3 independent measurements.
Extended Data Fig. 6 The relationship between the bending degree and distribution of the spring/square (○/□) microtubes at different locations in a VB.
a, Optical images showing the curvature change Δr-1 of a VB from dry (rDry-1, RH = 11%) to wet (rWet-1, underwater) state. The cyan rectangles indicate the top, middle and bottom parts of the VB. The dash circles are the osculating circles of the top part. The curvature is defined as r-1, where r is the radius of the circle. b, Reconstructed cross-sections of the top, middle and bottom parts of the VB by XCT. The white dash lines are the dividing lines between the spring microtube part (purple solid line) and square microtube part (orange solid line). Both the spring and square microtube parts show irregular shapes. c, The bending dependence of different parts of the VB (Δr-1h○+□, thickness-normalized curvature change) on the distribution of the two kinds of microtubes (h○/□, thickness ratio of spring microtube part to square microtube part) shows that thicker spring microtube part leads to larger deformation. The experimental results agree well with the theoretical value. The thickness of the spring microtube part h○ and square microtube part h□ were obtained according to the equivalent principle of inertia moment (Supplementary Table 3). The data in (c) are presented as mean ± s.d. of n = 3 independent measurements.
Extended Data Fig. 7 Numerical simulations of fluid flow for the plate with different motion velocities underwater.
a, The heat maps show plates with higher velocity towards the right will lead to larger disturbance to the sounding water. b, The velocity maps indicate the velocity magnitude and directions of the affected water. The colour bars indicate the value of flow velocity.
Extended Data Fig. 8 Optical images showing the reversible horizontal movement of the tabletop to transport object on it with spring/square pillar couples as legs.
The tabletop can move horizontally and smoothly underwater and recover to the original position in air by virtue of the movement of the spring/square pillar couples.
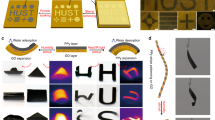
Extended Data Fig. 9 Various complex shape transformation based on the 3D-printed spring/square (○/□) pillar couple.
a, The pillar couple with gradient thickness of the square pillar transforms into cornucopia-like shape with gradient curvature underwater. b, The pillar couples with alternate distribution of the spring and square pillars transform into wave-like shape with alternate bending direction underwater. c, The 3D-printed artificial leaf based on the hetero-structured spring/square (○/□) microtubes model. The spring pillars are patterned as the veins on the flat plate as leaf blade. The flat artificial leaf (left) transformed into 3D structure after immersed in water (right). d, The 3D-printed parallel triple-pillar (spring/square/square) system.
Extended Data Fig. 10 SEM images of the spring and square microtubes in the VBs from different kinds of pine cones.
Although different kinds of pine cones are of different sizes and morphologies (a, optical images of the pine cones), they all comprise VBs (b) with spring (c) and square (d) microtubes.
Supplementary information
Supplementary Information
Supplementary Figs. 1–5, Tables 1–3 and captions for Videos 1–11.
Supplementary Video 1
Reversible hygroscopic geometric reshaping of the pine cone scale. In this video, a scale was separated from the pine cone (P. elliottii), and the tail was fixed to a holder. The reversible motion of the scale was observed by placing the scale underwater and in air alternately.
Supplementary Video 2
Reversible hygroscopic geometric reshaping of the skin. The skin was obtained from a scale by removing the skeleton. The tail of the skin was fixed to a holder. The reversible motion of the skin was observed by placing the skin underwater and in air alternately.
Supplementary Video 3
Reversible hygroscopic geometric reshaping of the skeleton. A skeleton was obtained from a scale by removing the sclereid tissue. The tail of the skeleton was fixed to a holder. The reversible motion of the skeleton was observed by placing the skeleton underwater and in air alternately.
Supplementary Video 4
Reversible hygroscopic geometric reshaping of the VB. A VB was separated from the skeleton and the tail was fixed to a holder. The reversible motion of the VB was observed by placing the VB underwater and in air alternately.
Supplementary Video 5
Hygroscopic motion of the spring microtube. The morphology changes of a single spring microtube were recorded in situ with ESEM under different humidity values. The spring microtube stretches along its long axis with an increase of humidity and shortens when the humidity decreases.
Supplementary Video 6
Hygroscopic motion of the square microtube. The morphology changes of a single square microtube were recorded in situ with ESEM under different humidity values. The length of the square microtube is almost unchanged at different humidity values.
Supplementary Video 7
Hygroscopic motion of a couple of spring/square microtubes. The morphology changes of the spring/square microtube couple were recorded in situ with ESEM under different humidity values. The couple bends towards the square microtube side in increasing humidity and towards the spring microtube side in decreasing humidity.
Supplementary Video 8
Reversible hygroscopic geometric reshaping of 3D-printed spring/square pillar couple. The 3D-printed spring/square pillar couple bends towards the square pillar side underwater and straightens in air (60 °C) with the evaporation of water.
Supplementary Video 9
The 3D-printed pillar couple without a spring structure, underwater. The side-by-side circular/square pillar couple stays still when underwater.
Supplementary Video 10
Spontaneous slow motion of the tabletop underwater. The motion of the tabletop is very slow and causes little disturbance to the surrounding water. Therefore, the ball on the tabletop moved smoothly along with the moving tabletop without any relative displacement, and the hanging ball kept still both in the horizonal and vertical directions.
Supplementary Video 11
Fast motion of the tabletop by pulling quickly with external force. The fast motion of the tabletop cause a disturbance to the surrounding water with a larger range and a greater extent than the tabletop with slow motion. Therefore, the ball on the fast-moving table rolled down the table, and the hanging ball rocked back and forth.
Source data
Source Data Fig. 1
Statistical source data.
Source Data Fig. 2
Statistical source data.
Source Data Fig. 3
Statistical source data.
Source Data Fig. 4
Statistical source data.
Source Data Fig. 5
Statistical source data.
Source Data Extended Data Fig. 1
Statistical source data.
Source Data Extended Data Fig. 2
Statistical source data.
Source Data Extended Data Fig. 5
Statistical source data.
Source Data Extended Data Fig. 6
Statistical source data.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhang, F., Yang, M., Xu, X. et al. Unperceivable motion mimicking hygroscopic geometric reshaping of pine cones. Nat. Mater. 21, 1357–1365 (2022). https://doi.org/10.1038/s41563-022-01391-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/s41563-022-01391-2
This article is cited by
-
Diffusive kinks turn kirigami into machines
Nature Communications (2024)
-
Bioinspired strategies for biomimetic actuators from ultrafast to ultraslow
Nano Research (2024)
-
Move imperceptibly
Nature Materials (2022)
