
Abstract
According to the second law, the efficiency of cyclic heat engines is limited by the Carnot bound that is attained by engines that operate between two thermal baths under the reversibility condition whereby the total entropy does not increase. Quantum engines operating between a thermal and a squeezed-thermal bath have been shown to surpass this bound. Yet, their maximum efficiency cannot be determined by the reversibility condition, which may yield an unachievable efficiency bound above unity. Here we identify the fraction of the exchanged energy between a quantum system and a bath that necessarily causes an entropy change and derive an inequality for this change. This inequality reveals an efficiency bound for quantum engines energised by a non-thermal bath. This bound does not imply reversibility, unless the two baths are thermal. It cannot be solely deduced from the laws of thermodynamics.
Similar content being viewed by others


Introduction
Engines are machines that convert some form of energy (e.g., thermal or electrical energy) into work. Their efficiency, defined as the ratio of the extracted work to the invested energy, is restricted to 1 at most by the energy-conservation law. While mechanical engines may reach this bound, Carnot showed1 that the efficiency of any heat engine that cyclically operates between two thermal baths is universally limited by the ratio of the bath temperatures, regardless of the concrete design2, 3. The universality of this bound led to the introduction of the notion of entropy by Clausius4 and the formalisation of the second law of thermodynamics.
The Carnot bound is attained by (idealised) heat engines that operate reversibly between two (cold and hot) thermal baths, so that the total entropy of the engine and the two baths combined is unaltered over a cycle2, 3, 5. This corresponds to the minimum amount of heat being dumped into the cold bath, so as to close the cycle, and hence to the maximum input heat being transformed into work. By contrast, in an irreversible cycle, a larger amount of heat must be dumped into the cold bath, so that less input heat is available for conversion into work, causing the engine efficiency to decrease3, 5.
Whereas the above considerations hold for engines that operate between two thermal baths at temperatures Tc and Th, there are more general engine cycles that comprise additional baths at intermediate temperatures between Tc and Th. However, any such cycle (be it reversible or not) is less efficient than a reversible cycle that solely involves Tc and Th2. Hence, to find out how to use available resources most efficiently it suffices to consider the two-bath scenario.
As part of the effort to understand the rapport between quantum mechanics and thermodynamics6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21 (see refs. 22,23,24,25,26 for recent reviews), the Carnot bound has been challenged for quantum engines in which one or both of the baths are non-thermal10, 27,28,29,30,31,32,33,34,35. In this respect, a distinction is to be drawn between two types of non-thermal engines32, 36, (i) engines wherein the working medium equilibrates to a thermal state whose temperature is adjustable (e.g., by the phase of the coherence in a ‘phaseonium’ bath10), which qualify as genuine heat engines with a controllable Carnot bound, and (ii) engines wherein the non-thermal (e.g., squeezed30) bath may render the working-medium state non-thermal, making the Carnot bound irrelevant.
The efficiency bound of the latter type of engines has been addressed29, 30, 32, 33, 35 but still needs elucidation. What is particularly puzzling is that, contrary to heat engines that operate between two thermal baths, their efficiency bound cannot be deduced from the requirement of reversible operation: Reversibility may entail an efficiency bound that not only surpasses the (as mentioned, irrelevant) Carnot bound but also unity33, making it unachievable. Hence, the question naturally arises whether such engines are limited by constraints other than the second law.
The second law for quantum relaxation processes is widely accepted9, 19, 22,23,24,25, 33, 37,38,39,40,41,42,43,44,45,46 to be faithfully rendered by Spohn’s inequality47. According to this inequality, the entropy change of a system that interacts with a thermal bath is bounded from below by the exchanged energy divided by the bath temperature. What has not been considered so far is, however, that the bound on entropy change in quantum relaxation processes crucially depends on whether the state of the relaxing system is non-passive. The definition7, 8, 11 of a non-passive state7, 8, 11, 23,24,25, 32, 36, 44, 48,49,50,51,52,53,54,55,56,57 is that its energy can be unitarily reduced until the state becomes passive, thereby extracting work. Non-passive states may thus be thought of as being ‘quantum batteries’49, 52 or ‘quantum flywheels’58. The maximum amount of work extractable from such states (their ‘work capacity’) has been dubbed ‘ergotropy’ in ref. 11. For example, every population-inverted state is non-passive and so are, e.g., coherent or squeezed field states, whereas thermal states are passive.
Here we examine the adequacy of assessing the maximum efficiency via the standard reversibility criterion in experimentally relevant21, 34 cyclic engines that intermittently interact with two (thermal or non-thermal) baths. We show that the standard reversibility criterion provides an inequality for the change in the engine entropy which may be much too loose (non-tight) to be useful if non-passive states are involved. The distinction between non-passive and passive states is at the heart of our analysis and underlies our division of the energy exchanged between a quantum system and a bath into a part that necessarily causes an entropy change, and ergotropy. Our proposed division is in fact a new unraveling of the first law of thermodynamics for quantum systems. In scenarios where non-thermal baths may create non-passive states of the working medium, we derive a new inequality for the entropy change which yields a physical efficiency limit of the engine that never surpasses unity. This efficiency limit in general cannot be assessed by the standard reversibility criterion. We illustrate these results for the practically relevant Carnot- and Otto cycles34 energised by non-thermal baths. Both cycles are shown to be restricted by our new efficiency bound.
Results
The first law of quantum thermodynamics
For an arbitrary process taking the initial state ρ0 of a quantum system to an evolving state ρ(t), which may be governed by a time-dependent Hamiltonian H(t) and a bath, energy conservation implies
where ΔE(t) is the change in the system energy E(t) = Tr[ρ(t)H(t)]. Its two constituents are
which is the non-unitary dissipative energy change due to the interaction with the bath, and
which is the work7 due to changes of the system Hamiltonian. Contrary to the energy change ΔE(t), both \({\cal E}_{\mathrm{d}}(t)\) and W(t) are process variables that generally depend on the evolution path, not only on the initial and final states. For thermal baths, the energy (2) is commonly identified with the transferred heat9. The energy \({\cal E}_{\mathrm{d}}(t)\) vanishes for a closed (isolated) system whose state evolves unitarily according to the von Neumann equation \(\dot \rho (t) = \frac{1}{{i\hbar }}\left[ {H(t),\rho (t)} \right]\). The work (3) is either extracted or invested by the external agent that controls the system via a time-dependent Hamiltonian, as in driven engines.
We here consider general scenarios, wherein the bath and/or the system may be in a non-thermal state and strive to better understand the nature of the exchanged energy (2) and, in particular, its relation to entropy change. As we show, only part of the exchanged energy \({\cal E}_{\mathrm{d}}(t)\) is necessarily accompanied by a change in entropy.
To elucidate this issue, we resort to the concept of non-passive states (see Fig. 1 and Methods ‘Non-passive states’). The energy E(t) of a non-passive state ρ(t) can be decomposed into ergotropy \({\cal W}(t) \ge 0\) and passive energy Epas(t). Ergotropy is the maximum amount of work that can be extracted from such a state by means of unitary transformations7, 8, 11. By contrast, the passive energy, which is the energy of the passive state π(t), cannot be extracted in the form of work.

Visualisation of the concept of passive energy and ergotropy. The different kinds of energy contained in a quantum state visualised by means of a battery at a certain temperature. The battery charge (yellow bars) represents ergotropy \({\cal W}\) (extractable as work, here illustrated by a lighted bulb) and its temperature (colour of the battery: red—hot, blue—cold) represents passive (here: thermal) energy Epas—the higher the temperature the larger the passive energy. a The battery is partly charged and hot: this represents a non-passive state that allows for work extraction. As the battery is not completely charged, the light bulb appears dim. b The battery is discharged, but its temperature is the same as in a. This state is the passive state of a and, consequently, the light bulb does not shine. c The battery is in a non-passive state whose ergotropy is higher than in a (the battery is fully charged) but the passive energy is lower (the battery is colder). Although the total energy in a, c may be the same, more work can be extracted from the state c, causing the light bulb to shine brighter than in a
The von Neumann entropy \({\cal S}(\rho (t)) = - k_{\mathrm{B}}\,{\mathrm{Tr}}\left[ {\rho (t){\mathrm{ln}}\,\rho (t)} \right]\) of a non-passive state ρ(t) is the same as that of its passive state π(t) since the two are related by a unitary transformation. Hence, a change in entropy requires a change in the passive state π(t). Equation (2), however, does not discriminate between ρ(t) and π(t): a change in ρ(t) may cause a non-zero \({\cal E}_{\mathrm{d}}(t)\) but not necessarily a change in entropy. By contrast, a change in π(t) results in entropy change.
In order to explicitly account for a change in the passive state, we may decompose the dissipative energy change (2) as follows:
where
is the dissipative (non-unitary) change in passive energy and
is the dissipative (non-unitary) change in the system ergotropy due to its interaction with the bath. The microscopic decomposition of the exchanged energy (4) into dissipative change in passive energy (5) and dissipative ergotropy change (6) is a new unraveling of the first law of thermodynamics for quantum systems that constitutes one of our main results.
The decomposition (4) carries with it the following insights: (a) although ergotropy may be transferred from a non-thermal bath to the system in a non-unitary fashion, it may afterwards still be extracted from the system in the form of work via a suitable unitary transformation. (b) Consistently, any unitary changes (in either ergotropy or in passive energy due to time-dependent changes of the Hamiltonian) are associated with work (3). If the Hamiltonian is constant, then \({\mathrm{\Delta }}\left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t)\) is only the change in passive energy without work, \({\mathrm{\Delta }}\left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t) = {\mathrm{\Delta }}E_{{\mathrm{pas}}}(t) = {\mathrm{Tr}}\left[ {\pi (t)H} \right] - {\mathrm{Tr}}\left[ {\pi _0H} \right]\), where π0 is the passive counterpart of the initial state ρ0. Likewise, \(\Delta {\cal W}_{\mathrm{d}}(t) = \Delta {\cal W}(t) = {\cal W}\left( {\rho (t)} \right) - {\cal W}\left( {\rho _0} \right)\) is then the change in ergotropy without work performance. (c) While a non-zero \({\mathrm{\Delta }}\left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t)\) entails a change in the passive state π(t) and hence in entropy, a non-zero \({\cal E}_{\mathrm{d}}(t)\), by contrast, does not necessarily imply an entropy change, as shown below. The correspondence of \({\mathrm{\Delta }}\left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t)\) and \(\Delta {\cal S}(t)\) is plausible since they have the same sign provided a majorisation relation44, 59 holds for ρ(t), as detailed in Methods (‘Majorisation relation’).
Let us illustrate these insights for a single cavity mode (harmonic oscillator at frequency ω) prepared in a pure coherent state \(\rho _0 = \left| {\alpha _0} \right\rangle \left\langle {\alpha _0} \right|\) that interacts (via a leaky mirror) with the surrounding electromagnetic-field bath (Fig. 2a), which for optical frequencies is very close to the vacuum state60. Being in contact with a bath, the cavity-mode state evolves in a non-unitary fashion (according to a quantum master equation46). Since the Hamiltonian is constant, the work (3) vanishes, W(t) = 0. While the cavity field exponentially decays to the vacuum state, \(\rho (t) = \left| {\alpha _0e^{ - i\omega t - \kappa t}} \right\rangle \left\langle {\alpha _0e^{ - i\omega t - \kappa t}} \right|\), where κ is the leakage rate, its entropy does not change, \({\cal S}(\rho (t)) = 0\), so that the passive state \(\pi (t) = \left| 0 \right\rangle \left\langle 0 \right|\) is constant. Consequently, \({\mathrm{\Delta }}\left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t) = 0\) and the entire energy change is due to dissipated ergotropy, \({\mathrm{\Delta }}E(t) = {\mathrm{\Delta }}\left. {\cal W} \right|_{\mathrm{d}}(t) = \hbar \omega \left| {\alpha _0} \right|^2\left( {e^{ - 2\kappa t} - 1} \right) \le 0\).

Interaction of a cavity mode with thermal and non-thermal baths. a A cavity mode initialised in a coherent state decays into the surrounding electromagnetic-field bath to the vacuum state. b A cavity mode prepared in the vacuum state evolves to a squeezed-vacuum state due to its interaction with a squeezed bath. The circles and the ellipse represent the respective phase-space distributions60 of the field states
As another example, consider again a single cavity mode, this time prepared in its vacuum state \(\rho _0 = \left| 0 \right\rangle \left\langle 0 \right|\), that interacts with an outside bath in a squeezed-vacuum state60 (see Methods ‘Master equation for a squeezed bath’), eventually converging to a squeezed-vacuum state inside the cavity (Fig. 2b). Although the initial and the steady state have zero entropy, this is not true during the evolution (Fig. 3). Consequently, both dissipative passive-energy change \({\mathrm{\Delta }}\left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t)\) and dissipative ergotropy change \({\mathrm{\Delta }}\left. {\cal W} \right|_{\mathrm{d}}(t) \ge 0\) occur. Figuratively, this process corresponds to a non-unitary charging of a battery.

Entropy and energy of a cavity mode interacting with a squeezed bath. Entropy, ergotropy and energy changes for a single cavity mode prepared in the vacuum state that interacts with an outside bath in a squeezed-vacuum state (Fig. 2b) obtained by a numerical integration of the master equation. The energies are given in units of ħω and the entropy in units of kB. Parameters: ω = 10κ and squeezing parameter r = 0.4, κ being the decay rate of the cavity
Reversibility criterion
In non-equilibrium thermodynamics, the accepted criterion for the irreversibility or reversibility of the system relaxation to its steady state is the non-negativity of the entropy production3. For quantum systems that are weakly coupled to (thermal or non-thermal) Markovian baths, Spohn47 put forward an expression for the entropy production Σ(t). Here we are interested in relaxation to steady state, for which we define \(\Sigma \mathop {:} = \Sigma (\infty )\), satisfying (see Methods ‘Entropy production Σ’)
where the equality sign is the reversibility condition. For a constant Hamiltonian, it evaluates to \({\mathrm{\Sigma }} = S\left( {\rho _0\left\| {\rho _{{\mathrm{ss}}}} \right.} \right) \ge 0\), where \(S\left( {\rho _0\left\| {\rho _{{\mathrm{ss}}}} \right.} \right): = k_{\mathrm{B}}\,{\mathrm{Tr}}\left[ {\rho _0\left( {{\mathrm{ln}}\,\rho _0 - {\mathrm{ln}}\,\rho _{{\mathrm{ss}}}} \right)} \right]\) is the entropy of the system initialised in a state ρ0 at t = 0 relative to the steady state ρss to which it relaxes. For a slowly time-varying Hamiltonian9, 61, Eq. (7) gives rise to an inequality for the the change Δ\({\cal S}\) of the system (von Neumann) entropy, given in Methods (‘Entropy production Σ’).
The common9, 19, 22,23,24,25, 33, 37,38,39,40,41,42,43,44,45,46 identification of Eq. (7) with the second law appears plausible for systems in contact with thermal baths: It then evaluates to \({\mathrm{\Sigma }} = {\mathrm{\Delta }}{\cal S} - {\cal E}_{\mathrm{d}}{\mathrm{/}}T \ge 0\), where \({\cal E}_{\mathrm{d}}\) is the dissipative change in the system energy defined in Eq. (2) (in the limit t → ∞).
Here we contend that although inequality (7) is a formally correct statement of the second law (under standard thermodynamic assumptions), it may not provide a meaningful estimate of Δ\({\cal S}\) if a system is initialised in a non-passive state and/or interacts with a non-thermal bath. Physically, this is because, as discussed above, the exchanged energy \({\cal E}_{\mathrm{d}}\) may be non-zero even if the entropy does not change.
Entropy change in relaxation processes involving ergotropy
Consider the decay of an initially non-passive state ρ0 to a (passive) thermal state ρth via contact with a thermal bath at temperature T. Based on the decomposition (4), the reversibility condition (7) evaluates to (at t → ∞)
where both dissipative change in passive energy (5) and dissipated ergotropy (6) appear. In what follows we shall revise this inequality, which may greatly overestimate the actual entropy change. As shown below, a tight inequality for Δ\({\cal S}\) is indispensable for correctly assessing the maximum efficiency of an engine.
We first consider the case of a constant Hamiltonian. As we have seen, dissipative ergotropy change is not necessarily linked to a change in entropy. Therefore, the lower bound on Δ\({\cal S}\) in Eq. (8) may be not tight (maximal). It is obtained from Spohn’s inequality (7) for the relaxation of an initially non-passive state in a thermal bath. However, one may resort to the fact that the entropy \({\cal S}\) is a state variable, so that \({\mathrm{\Delta }}{\cal S} = {\cal S}\left( {\rho _{{\mathrm{th}}}} \right) - {\cal S}\left( {\rho _0} \right)\) is path-independent, i.e., its value only depends on the initial state ρ0 and the (passive) thermal steady state ρth. Hence, Spohn’s inequality (7) may well be applied to alternative evolution paths from ρ0 to ρth, giving rise to different inequalities for the same Δ\({\cal S}\).
In particular, we now consider a path that does not involve any dissipation of ergotropy to the bath: Namely, one may start the process by performing a unitary transformation to the passive state, \(\rho _0 \mapsto \pi _0\). Thereafter, this state is brought in contact with the thermal bath, yielding the steady-state solution ρth. Inequality (7) applied to this alternative path yields
where \({\mathrm{\Delta }}\left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}\) is the same as in Eq. (8).
The steady state attained via contact with a thermal bath is passive, hence the system ergotropy must decrease as a result of the relaxation, \({\mathrm{\Delta }}\left. {\cal W} \right|_{\mathrm{d}} \,= - {\cal W}_0 \le 0\), where \({\cal W}_0 \ge 0\) is the initial ergotropy stored in the state ρ0. Hence, inequality (9) always entails inequality (8) and is thus a tighter and more relevant estimate of Δ\({\cal S}\). This has a crucial consequence: if the initial state is non-passive, inequality (9) rules out the equality sign in inequality (8), so that the considered decay via contact with a thermal bath can never be reversible according to criterion (7).
We now consider the more general situation wherein the system is governed by a constant Hamiltonian and interacts with an arbitrary bath (that may not be parameterised by a temperature) until it reaches the steady state ρss. In order to obtain an optimal (the tightest) inequality for the entropy change Δ\({\cal S}\), we here instead of inequality (7) (see Methods ‘Entropy production Σ for non-thermal baths’) propose to adopt the mathematical relation
As shown in Methods (‘Optimality of the inequality for relative entropy’), Eq. (10) provides generally a tight inequality for Δ\({\cal S}\). The motivation for Eq. (10) is, as before, that the entropy of any state ρ is the same as that of its passive counterpart π. If πss is a thermal state, we recover Eq. (9).
We stress that, contrary to Spohn’s inequality (see Methods ‘Entropy production Σ’), Eqs. (9) and (10) do not require weak coupling between the system and the bath (in the same spirit as in refs. 40, 62) and are thus universally valid whenever the reduced state of the system reaches a steady state.
We now allow the Hamiltonian H(t) to slowly vary during the evolution9. Contrary to the case of a constant Hamiltonian, the dissipative passive-energy change (5) and the ergotropy change (6) in the r.h.s. of Eq. (8) are now path-dependent. Namely, they are not only determined by the initial state ρ0 and the steady state ρth(∞), which is a thermal state under the Hamiltonian H(∞).
Since during the evolution the time-dependent Hamiltonian may generate a non-passive state (even if the initial state is passive and the bath is thermal) we cannot, in general, find an alternative path void of dissipated ergotropy for the same H(t). Notwithstanding, we may still consider a path void of initial ergotropy in the spirit of the previous section by extracting the ergotropy of the initial state in a unitary fashion prior to the interaction with the bath, resulting in the passive state π0. Afterwards, this passive state is brought into contact with the thermal bath, yielding the steady state ρth(∞). Spohn’s inequality can be applied to the latter step, yielding
with the energy
exchanged with the bath along the alternative path. Here \(\varrho\)(t) is the solution of the same thermal master equation that governs ρ(t) but with the initial condition \(\varrho _{\mathrm{0}}\) = π0. In the case that the initial state ρ0 is already passive, we have \(\varrho\)(t) = ρ(t), \({\cal E}\prime_{\mathrm{d}} = {\cal E}_{\mathrm{d}}\) and Eqs. (7) and (11) coincide. For a constant Hamiltonian, Eq. (11) evaluates to Eq. (9).
Consider now the more general situation where a quantum system interacts with a non-thermal bath and eventually relaxes to a unitarily transformed thermal state Uρth(∞)U†. A prime example is a harmonic oscillator that interacts with a squeezed thermal bath60, 63: Its steady state is a squeezed thermal state. Then one can show (see Methods ‘Unitary equivalence of non-thermal and thermal baths’) that this situation can be traced back to the interaction of a unitarily transformed state \(\tilde \rho (t): = U^\dagger \rho (t)U\) with a thermal bath, provided that the Hamiltonian H(t) commutes with itself at all times; a harmonic oscillator with a time-dependent frequency and time-independent eigenstates is an example. This requirement will be adopted in the remainder of this paper for any interaction of a system with a non-thermal bath. The relaxation of a possibly non-passive state \(\tilde \rho (t)\) in a thermal bath pertains to the scenario considered above upon replacing ρ(t) by \(\tilde \rho (t)\) there. Equation (11) thus also holds for this class of non-thermal baths (the derivation and the generalisation to arbitrary non-thermal baths are discussed in Methods ‘Entropy change for time-dependent Hamiltonians’).
The new entropic inequality (11) is the second main result of our work. For the special case of a constant Hamiltonian, it reduces to inequality (9).
Maximal efficiency of engines powered by non-thermal baths
In view of our new inequality (11), does inequality (7) always provide a true bound on the engine efficiency? Namely, is reversibility indeed the key to operating a quantum engine at the highest possible efficiency? This question arises for cyclic engines fuelled by non-thermal (e.g., squeezed) baths, since such baths may transfer both passive thermal energy and ergotropy to the system while Eq. (7) does not distinguish between these two different kinds of energies.
Here we consider a quantum engine (Fig. 4) that operates between a cold thermal bath (at temperature Tc) and a hot non-thermal bath subject to a time-dependent drive (the ‘piston’9). As in common, experimentally relevant situations34, the non-thermal bath drives the working medium into a non-passive state whose passive counterpart is assumed to be thermal. This allows us to maintain the notion of a ‘hot’ bath with temperature Th > Tc, where Th is defined by the steady-state solution of the working medium. As an example, in the case of a single-cavity mode interacting with the surrounding electromagnetic field in a squeezed-thermal state46, 60, the temperature Th equals the thermodynamic temperature of the bath prior to its squeezing. The generalisation of the present analysis to arbitrary passive states is straightforward (see Methods ‘Derivation of the efficiency bound’).

Engine fuelled by a non-thermal bath. Schematics of an engine fuelled by a hot non-thermal (e.g., squeezed thermal) bath that provides the input energy \({\cal E}_{{\mathrm{d,h}}}\). The engine operates in an arbitrary cycle wherein work is extracted by a piston and an amount of energy \({\cal E}_{{\mathrm{d,c}}}\) is dumped into the cold thermal bath
Existing treatments of engines powered by non-thermal baths have taken the system–baths interaction to be isochoric, i.e., subject to a constant Hamiltonian28,29,30,31,32,33. We here relax this restriction and allow for stroke cycles wherein the working medium (WM) Hamiltonian is allowed to slowly change during the interaction with the baths9. We only impose the condition that the WM attains its steady state at the end of the energising stroke (wherein it interacts with the hot non-thermal bath) and the resetting stroke (wherein it interacts with the cold thermal bath).
The energising stroke is described by a master equation46 that evolves the WM state to a unitarily transformed thermal state ρss(∞) = Uρth(∞)U†, hence Eq. (11) holds. After this stroke, the WM is in a non-passive state, whose ergotropy is subsequently extracted by the piston via a suitable unitary transformation. Since we seek the efficiency bound, we assume that no ergotropy is dissipated in the cold bath (and thus lost), hence the requirement to extract it from the WM before its interaction with that bath. We note that in cycles where both baths are simultaneously coupled to the WM (as in continuous cycles64), part of the ergotropy is inevitably dissipated into the cold bath, so that such cycles are inherently less efficient than stroke cycles adhering to the above requirement.
Similarly, Hamiltonians that do not commute with themselves at different times are known to reduce the efficiency due to ‘quantum friction’22, 26, 45, 65, whereas we are here interested in principal limitations on the efficiency. Hence, during the interaction with the non-thermal bath, the Hamiltonian is assumed to commute with itself at all times, as already mentioned in the discussion on the validity of Eq. (11) for such a bath.
The engine’s WM must return to its initial state after each cycle. This implies that \({\mathrm{\Delta }}{\cal S} = 0\) over a cycle, hence the importance of having a tight estimate for the entropy change within each stroke. The entropy changes in the two relevant strokes satisfy \({\mathrm{\Delta }}{\cal S}_{\mathrm{c}} \ge {\cal E}_{{\mathrm{d,c}}}{\mathrm{/}}T_{\mathrm{c}}\) and \({\mathrm{\Delta }}{\cal S}_{\mathrm{h}} \ge {\cal E}\prime_{{\mathrm{d,h}}} {\mathrm{/}}T_{\mathrm{h}}\). Here \({\cal E}_{{\mathrm{d,c}}} \le 0\) is the change in the WM energy due to its interaction with the cold thermal bath and \({\cal E}\prime_{{\mathrm{d,h}}} \ge 0\) is the change the WM energy would have, had the non-thermal bath been thermal (as in Eq. (11)). Taking into account that the WM is passive prior to its interaction with the cold bath, so that Eqs. (7) and (11) coincide for that stroke, the condition of vanishing entropy change over a cycle (which must hold in any cycle) then yields the inequality
The efficiency of the engine is defined as the ratio of the extracted work to the invested energy, \(\eta : = - W{\mathrm{/}}{\cal E}_{{\mathrm{d,h}}}\), where \({\cal E}_{{\mathrm{d,h}}}\) is the total energy (the sum of passive thermal energy and ergotropy) imparted by the non-thermal bath during the energising stroke. Using the first-law statement (1), this ratio may be expressed through the energy transfers \({\cal E}_{{\mathrm{d,c}}}\) and \({\cal E}_{{\mathrm{d,h}}}\). Condition (13) on \({\cal E}_{{\mathrm{d,c}}}\) (the energy lost to the cold bath) then restricts the efficiency to
Its derivation as well as a more general expression for the case where the passive state after the energising stroke is non-thermal are given in Methods (‘Derivation of the efficiency bound’).
The efficiency bound (14) does not only depend on the two temperatures, which is to be expected, as non-thermal baths may occur in various forms that cannot be universally described by a common set of parameters. The physical details of the bath (e.g., its squeezing parameter) are thus encoded in the fraction of the two energies \({\cal E}\prime_{{\mathrm{d,h}}}\) and \({\cal E}_{{\mathrm{d,h}}}\), whose forms are universal. This fraction expresses the ratio of generalised heat transfer to the total energy input from the hot bath.
The bound (14) underscores the physicality of our inequality (11): in the usual regime of functioning of the engine, \({\cal E}_{{\mathrm{d,h}}}^\prime \ge 0\) and \({\cal E}_{{\mathrm{d,h}}} >\,0\) (i.e., the hot bath provides energy and increases the WM entropy), the bound (14) is limited by unity, ηmax ≤ 1, which is reached in the ‘mechanical’-engine limit \({\cal E}\prime_{{\mathrm{d,h}}} \to 0\) where the non-thermal bath only provides ergotropy. By contrast, the bound ηΣ that stems from the reversibility condition (7) (derived in Methods ‘Derivation of the efficiency bound’) may surpass 1 (see ref. 33). In the opposite, heat-engine, limit \({\cal E}\prime_{{\mathrm{d,h}}} \to {\cal E}_{{\mathrm{d,h}}}\) where only passive thermal energy but no ergotropy is imparted by the hot bath, Eq. (14) reproduces the Carnot bound ηC = 1 − Tc/Th. As shown below, if the Hamiltonian is kept constant during the interaction with the non-thermal bath, then Eq. (14) is restricted by ηC ≤ ηmax ≤ ηΣ. Therefore, for such engines our new bound (14) is always tighter than the second-law bound ηΣ.
The bound (14) is valid in the regime \({\cal E}_{{\mathrm{d,c}}} \le 0\) and \({\cal E}\prime_{{\mathrm{d,h}}} \ge 0\) wherein the cold bath serves as an energy dump. As shown in ref. 32, there exists a regime wherein such a machine acts simultaneously as an engine and a refrigerator for the cold bath. The efficiency then evaluates to η = 1 (see Methods ‘Derivation of the efficiency bound’).
We have thus reached a central conclusion: the efficiency bound of the engine increases with the decrease of the ratio of the energy that an alternative thermal engine would have received (in the same energising stroke) to the total energy imparted by the non-thermal bath (in the actual engine cycle). In the limit of thermal baths9, we recover the standard Carnot bound for the efficiency of heat engines, even if the engine (in any cycle) exhibits quantum signatures (e.g., quantum coherence in the WM due to the piston action19) or the WM-bath interactions are time-dependent65.
We note that the costs of bath preparation or the heat generated by a clock66, 67 required to implement a time-periodic Hamiltonian will reduce the efficiency. In the spirit of thermodynamics, however, the bound (14) only takes into account limitations inherent to the cycle.
Whilst our analysis is focused on the two-bath situation, Eq. (13) can be generalised to cycles where the working medium intermittently interacts with additional (thermal or non-thermal) baths. This generalisation shows (see Methods ‘Maximal efficiency of multi-bath quantum engines’) that the efficiency of multi-bath engines is always lower than the maximum efficiency (14) of the appropriate two-bath engine, thus reaffirming the generality of the bound (14).
Specific quantum engines
We now pose the question: Which bound is more relevant, ηΣ (whose explicit form is given in Methods ‘Derivation of the efficiency bound’) that stems from the reversibility condition (7), or ηmax given by Eq. (14)? Contrary to the Carnot bound, the efficiency bound (14) not only depends on the parameters of the baths but also on the energising stroke through the stroke’s initial condition and the Hamiltonian that determine the integrals \({\cal E}\prime_{{\mathrm{d,h}}}\) and \({\cal E}_{{\mathrm{d,h}}}\). Yet, the functional form (14) is independent of the choice of the non-thermal bath or the WM. Whether or not this bound is reached by an engine that implements this chosen energising stroke is then determined by condition (13).
In complete generality, the tighter of the alternative efficiency bounds derived here,
is the relevant one. Relation (15) is the universal thermodynamic limit on quantum engine efficiency, which never surpasses unity.
Notwithstanding the alternatives that may be offered by Eq. (15), we now discuss two generic practically relevant engine cycles for which one can explicitly show that ηmax ≤ ηΣ. Such engines are thus not restricted by the second law, but by other constraints on their entropy.
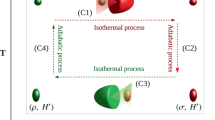
Carnot cycle: We first consider a photonic Carnot-like engine fuelled by a squeezed-thermal bath, as depicted in Fig. 5. It contains the four strokes of the regular thermal Carnot cycle1,2,3,4, as well as an additional ergotropy-extraction stroke (stroke 3 in the figure). In the regular thermal Carnot cycle, the interactions with the baths are isothermal.

A photonic Carnot cycle for a squeezed thermal bath. The cycle starts with a thermal state with frequency ωc and temperature Tc (lower left corner). In stroke 1, the mode undergoes an adiabatic compression to frequency ω2 = ωcTh/Tc and temperature Th > Tc. Thereafter, in the energising stroke 2, the frequency is slowly reduced to ωh ≤ ω2 while the mode is connected to the squeezed thermal bath, yielding a squeezed thermal steady state. Its ergotropy is extracted in stroke 3 by an ‘unsqueezing’ unitary operation, resulting in a thermal state with temperature Th. In stroke 4, the frequency is again adiabatically reduced to ω1 = ωhTc/Th such that the mode attains the temperature Tc. Finally, stroke 5 is an isothermal compression back to the initial state
Based on Eq. (11), we have in the second stroke \({\cal E}\prime_{{\mathrm{d,h}}} = T_{\mathrm{h}}{\mathrm{\Delta }}{\cal S}_{\mathrm{h}}\), since the master equation void of squeezing induces isothermal expansion wherein the state \(\varrho\)(t) is always in thermal equilibrium (Fig. 6). Stroke 5 is isothermal compression, i.e., \({\cal E}_{{\mathrm{d,c}}} = T_{\mathrm{c}}\Delta {\cal S}_{\mathrm{c}}\). The condition of vanishing entropy change over a cycle, \({\mathrm{\Delta }}{\cal S} = {\cal E}_{{\mathrm{d,c}}}{\mathrm{/}}T_{\mathrm{c}} + {\cal E}\prime_{{\mathrm{d,h}}} {\mathrm{/}}T_{\mathrm{h}} = 0\), corresponds to the equality sign in condition (13). Hence, the efficiency of this cycle is the bound in Eq. (14).

Entropy change in a Carnot cycle. Change in entropy (in units of kB) during stroke 2 of the modified Carnot cycle in Fig. 5 as a function of the stroke duration obtained by a numerical integration of the master equation. The upper (blue) curve corresponds to the reversibility criterion (7); it is seen that the inequality Σ ≥ 0 is far from being saturated. By contrast, our proposed inequality (11) is saturated (i.e., the equality sign applies) for sufficiently long stroke duration (red lower curve); here \(\Delta {\cal S}_{\mathrm{h}}(t) = {\cal S}\left( {\rho (t)} \right) - {\cal S}\left( {\rho _0} \right)\). Parameters: oscillator frequency ω(t) = (25 − 0.05κt)κ, kBTh = 5ħκ and squeezing parameter r = 0.2, κ being the decay rate of the cavity
Consequently, the bound ηmax is lower than ηΣ for all possible engine cycles that contain a ‘Carnot-like’ energising stroke, namely, a stroke characterised by a slowly changing Hamiltonian and an initial thermal state at temperature Th, such that \({\cal E}\prime_{{\mathrm{d,h}}} = T_{\mathrm{h}}{\mathrm{\Delta }}{\cal S}_{\mathrm{h}}\).
Such a photonic Carnot engine energised by a squeezed bath may be implemented as a modification of the photonic Carnot cycle based on a cavity in a micromaser setup in the seminal work by Scully et al.10: instead of a beam of coherently prepared three-level atoms (phaseonium) that constitute an effective thermal bath for the cavity-mode WM, we here suggest, following ref. 36, to use a beam of suitably entangled atom pairs passing through a cavity that may act as a squeezed-thermal bath for the same WM (Fig. 7a). The steady state of the cavity mode is then determined by a squeezing parameter r and a temperature Th, which are both a function of the two-atom state36. A major advantage of this method is that it allows for very high squeezing parameters. In order to extract the ergotropy that is stored in the cavity mode after its interaction with the squeezed bath and before its interaction with the cold bath (where it would be lost), a unitary transformation that ‘unsqueezes’ the cavity field must be performed, e.g., as in refs. 68,69,70, where the cavity-mode frequency is abruptly ramped up and then gradually ramped down (Fig. 7b).

Squeezing and unsqueezing of a cavity mode. a The interaction of a cavity mode with a squeezed thermal bath (stroke 2 in Fig. 5) may be realised in a micromaser setup where a beam of entangled atom pairs passes through the cavity36. b The unsqueezing operation in stroke 3 of Fig. 5 may be implemented by a suitable modulation of the cavity frequency68,69,70
Otto cycle: Next, we consider a quantum Otto cycle19, 26, 71,72,73,74 that consists of two isentropic strokes (adiabatic compression and decompression of the WM), two isochoric strokes (interaction with the baths at a fixed Hamiltonian) and an additional ergotropy-extraction stroke. This cycle amounts to setting ω2 = ωh and ω1 = ωc in Fig. 5.
Since the Hamiltonian is now kept constant during the energising stroke, we have \({\cal E}_{{\mathrm{d,h}}}^\prime = {\mathrm{\Delta }}E_{{\mathrm{pas,h}}}\), where ΔEpas,h is the change in passive energy during the hot stroke, and \({\cal E}_{{\mathrm{d,h}}} = \Delta E_{{\mathrm{pas,h}}} + {\mathrm{\Delta }}{\cal W}_{\mathrm{h}}\), where \({\mathrm{\Delta }}{\cal W}_{\mathrm{h}}\) is the change in ergotropy during that stroke. The efficiency of this Otto-like cycle is bounded by Eq. (14),
but this bound is only attained in the ‘mechanical’ limit \({\cal E}_{{\mathrm{d,h}}}^\prime = {\mathrm{\Delta }}E_{{\mathrm{pas,h}}} = 0\), where only ergotropy is transferred from the non-thermal bath and no net entropy change occurs during the strokes. In this case the bound equals 1, as one expects for mechanical engines. By contrast, the Carnot-like cycle always operates at maximum efficiency, even when both passive thermal energy and ergotropy are imparted by this bath.
In general, any engine cycle wherein the interaction with the hot bath is isochoric (has constant Hamiltonian) and sufficiently long (for the WM to reach steady state) abides by the bound (16), which is lower than the bound ηΣ imposed by the second law (Fig. 8). Moreover, their efficiency bound always surpasses the Carnot bound, \(\eta _{{\mathrm{max}}}^{{\mathrm{Otto}}} \ge \eta _{\mathrm{C}}\).

Efficiency bounds for the Otto-like cycle. Actual efficiency η and alternative efficiency bounds (the explicit expressions are summarised in Methods ‘Expressions used in Fig. 8’) for an Otto-like cycle implemented with a harmonic-oscillator working medium and a squeezed thermal bath as a function of a the frequency ratio and b the squeezing parameter. The bounds only hold in the regime \({\cal E}_{{\mathrm{d,c}}} \le 0\) (see text). Parameters: Th = 3Tc and a squeezing parameter r = 0.5 and b oscillator frequencies ωc/ωh = 0.5
Discussion
Our analysis has been aimed at comparing the efficiency bounds and the conditions for their attainment in quantum engines energised by thermal and non-thermal baths. These respective bounds turn out to be very different since, unlike thermal baths, non-thermal baths may exchange both thermal (passive) energy and ergotropy with the WM. To this end, we have revisited the first law of thermodynamics and identified as passive energy the part of the energy exchange with the bath that necessarily causes a change in the WM entropy (Eq. (5)). This division of the exchanged energy relies on the distinction between passive and non-passive states of the WM. Only the latter states store ergotropy that may be completely extracted in the form of work. Our energetic division conceptually differs from the one involving ‘housekeeping heat’ previously provided for classical systems75. It would be interesting to extend our analysis to situations where ‘housekeeping heat’ has been considered in a quantum context76, 77.
Based on the distinction between passive and non-passive states, we have put forward a new estimate (11) of the entropy change in quantum relaxation processes, which turns out to be the key to understanding the limitations of quantum engines fuelled by arbitrary baths. Cyclic engines whose passive energy is altered by the baths are restricted in efficiency by limits on their entropy change. Yet, for a wide class of practically relevant engines, including all engines whose energising stroke is either isochoric or Carnot-like, the restriction imposed by inequality (11) on the entropy change is stricter than what the second law (7) would allow. By contrast, the commonly used reversibility is a global condition on the WM and the two baths combined that is imposed by the second law, and hence not necessarily a relevant characterisation of engine efficiency.
An alternative formulation of our main insight is that, for any baths, entropy change limits the engine efficiency in the same way as in traditional heat engines—condition (13) is the same whether the energising bath is thermal or not. Namely, maximal efficiency is reached when (a) no ergotropy (extractable work) is dumped into the cold bath and (b) no entropy is generated within the engine, or, equivalently, minimal energy is dumped into the cold bath3. For thermal engines, this criterion of minimal energy dumping and the reversibility criterion coincide, but the two criteria differ if the energising bath is non-thermal.
Another important insight is that the same efficiency bound (14) ensues whether the WM is energised by a non-thermal bath or by a thermal bath (that supplies thermal energy) combined with a battery (that supplies ergotropy) provided the total energy imparted by the WM remains the same. This supports the description of non-thermal engines as hybrids of thermal (thermal-energy-fuelled) and ‘mechanical’ (ergotropy-fuelled) engines32.
Our theory provides better understanding of the operation principles of quantum engines: These are shown not to follow only from the laws of thermodynamics, but require discrimination between different (passive and non-passive) quantum states of the system (WM) and the baths involved. The present generalisation of the treatment of standard thermal processes for quantum systems is not only the key to the construction of the most efficient hybrid engines that are unrestricted by the Carnot bound, as in the recent experimental implementation of an engine powered by a squeezed bath34. It may also open a new perspective on quantum-channel communications56, 59, 78 where entropic constraints play a major role.
Methods
Non-passive states
The energy E of a state ρ with respect to a Hamiltonian H can be decomposed into ergotropy \({\cal W}\) and passive energy Epas. Ergotropy is the maximum amount of work that can be extracted from the state by means of unitary transformations such that the Hamiltonian before and after the unitary coincide7, 8, 11. The passive energy, by contrast, cannot be extracted in the form of work. States that only contain passive energy are called passive states.
Ergotropy is defined as
where the minimisation is over the set of all possible unitary transformations. Consequently, any state ρ can be written as \(\rho = V_\rho \pi V_\rho ^\dagger\), i.e., as a unitarily transformed passive state π, where V ρ is the unitary that realises the minimum appearing on the r.h.s. of Eq. (17). The energy of the state ρ thus reads
Explicitly, the passive state and its energy read
where {r n } are the ordered (rn+1 ≤ r n ∀n) eigenvalues of ρ and \(\left\{ {\left| n \right\rangle } \right\}\) is the ordered (En+1 ≥ E n ∀n) eigenbasis of H. When H is non-degenerate, π is unique. If H is degenerate, its eigenbasis and, consequently, the passive state (19), may be not unique. However, the energies (20) of all passive states corresponding to ρ are the same and equal the passive energy of ρ.
Majorisation relation
Assume \(\rho \left( {t{\prime}} \right) \succ \rho \left( {t{\prime\prime}} \right)\) for any t″ ≥ t′ in some time interval I (t′, t″ ∈ I), namely that ρ(t′) majorises44, 59 ρ(t″) in this interval, i.e.,
where rm+1(τ) ≤ r m (τ) (τ ∈ I) are the ordered eigenvalues of ρ(τ) (cf. Eq. (19)) and N is the dimension of the Hilbert space of the system.
Let us consider the sign of the dissipative passive-energy change \(\Delta \left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}\) under this majorisation condition. We may write (5) in the form
where we have defined
where En+1(τ) ≥ E n (τ) are the ordered eigenvalues of the Hamiltonian (cf. Eq. (20)). Using summation by parts and the normalisation of the density matrix, this function may be rewritten as
The first factor is non-negative due to the monotonically ordered energies. The second factor is also non-negative if Eq. (21) holds in the entire integration domain [0, t]. In this case, the majorisation relation implies \(\Delta \left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t) \ge 0\).
Let us now turn to the sign of the entropy change. If \(\rho _1 \succ \rho _2\), then \({\cal S}\left( {\rho _2} \right) \ge {\cal S}\left( {\rho _1} \right)\)11. Hence, we have the relation
where \(\Delta {\cal S}(t) = {\cal S}(\rho (t)) - {\cal S}\left( {\rho _0} \right)\). Similarly, one can show that the opposite relation holds, \(\rho \left( {t{\prime}} \right) \prec \rho \left( {t{\prime\prime}} \right) \Rightarrow \Delta \left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t) \le 0 \wedge \Delta {\cal S}(t) \le 0\). When the Hamiltonian is non-degenerate, \(\Delta \left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t)\) and \(\Delta {\cal S}(t)\) can be shown to vanish iff the passive state corresponding to ρ(τ) is constant (i.e., the evolution of ρ(τ) is unitary) for τ ∈ [0, t].
For the case of a constant Hamiltonian, relation (25) was obtained in ref. 44. In this case, \(\Delta \left. {E_{{\mathrm{pas}}}} \right|_{\mathrm{d}}(t) = \Delta E_{{\mathrm{pas}}}(t)\) and hence Eq. (25) implies that the passive energy of ρ2 is greater than or equal to the passive energy of ρ1 if \(\rho _1 \succ \rho _2\) or, equivalently, if \(\pi _1 \succ \pi _2\), where π i is the passive state corresponding to ρ i (i = 1, 2).
Master equation for a squeezed bath
In the interaction picture, the master equation for a harmonic oscillator that interacts with a squeezed thermal bath reads60
where \({\cal D}(A,B)[\rho ]: = 2A\rho B - BA\rho - \rho BA\). Here κ denotes the decay rate and (w.l.o.g. we have set the squeezing phase to zero)
where \(\bar n = \left[ {{\mathrm{exp}}\left( {\hbar \omega {\mathrm{/}}\left[ {k_{\mathrm{B}}T} \right]} \right) - 1} \right]^{ - 1}\) is the thermal excitation number of the bath at the oscillator frequency ω and r the squeezing parameter. The results in Fig. 3 were obtained by a numerical solution of Eq. (26) with \(\bar n = 0\).
Defining \(b: = S(r)aS^\dagger (r) = a\,{\mathrm{cosh}}\,r + a^\dagger \,{\mathrm{sinh}}\,r\), where \(S(r) = {\mathrm{exp}}\left[ {\frac{r}{2}a^2 - \frac{r}{2}\left( {a^\dagger } \right)^2} \right]\) is the unitary squeezing operator, the master equation (26) can be cast into the Lindblad form46, 63
Its steady-state solution is the squeezed thermal state S(r)[Z−1 exp(−ħωa†a/[kBT])]S†(r).
Entropy production Σ
Spohn’s inequality for the entropy-production rate reads47
where \(S\left( {\left. {\rho (t)} \right\|\rho _{{\mathrm{ss}}}} \right): = k_{\mathrm{B}}\,{\mathrm{Tr}}\left[ {\rho (t)\left( {{\mathrm{ln}}\,\rho (t) - {\mathrm{ln}}\,\rho _{{\mathrm{ss}}}} \right)} \right]\). Inequality (30) holds for any ρ(t) that evolves according to a Lindblad master equation46
\({\cal L}\) being the Liouvillian (Lindblad operator). The steady-state solution of Eq. (31) obeys \({\cal L}\rho _{{\mathrm{ss}}} = 0\). Then, upon defining \(\Sigma : = {\int}_0^\infty \sigma {\mathrm{d}}t\), the time-integrated inequality (30) yields
Equality (30) requires the coupling between the system and the bath to be sufficiently weak and the bath relaxation to be sufficiently fast to allow for the perturbative derivation of the Lindblad master equation. In the spirit of traditional thermodynamics, the Lindblad approach excludes correlations or entanglement between the system and the bath46. In general, Eq. (30) may not hold for non-Markovian baths12. In contrast, since the relative entropy is non-negative, Eq. (32) holds for arbitrary coupling between the system and the bath40, 62.
As shown in refs. 9, 61, Spohn’s inequality (30) can be generalised to time-dependent Hamiltonians under the condition that H(t) varies slowly compared to the relaxation time of the reservoir9. The corresponding master equation then reads
where \({\cal L}(t)\) is the same Liouvillian as in Eq. (31), but with time-dependent coefficients (cf. ref. 9). Its invariant state ρss(t) satisfies \({\cal L}(t)\rho _{{\mathrm{ss}}}(t) = 0\). The generalisation of inequality (30) then reads61
Upon integration, Eq. (34) evaluates to the inequality
for the entropy change \(\Delta {\cal S} = {\cal S}\left( {\rho _{{\mathrm{ss}}}(\infty )} \right) - {\cal S}\left( {\rho _0} \right)\). In the case of a constant Hamiltonian, Eq. (35) reduces to Eq. (32).
If the Liouvillian describes the interaction with a thermal bath at temperature T, i.e., \({\cal L}(t) = {\cal L}_{{\mathrm{th}}}(t)\), then ρss(t) = ρth(t), where
is a thermal state for the (instantaneous) Hamiltonian H(t). Equation (35) then yields
with the dissipated energy \({\cal E}_{\mathrm{d}}\) defined in Eq. (2).
Entropy production Σ for non-thermal baths
Let us consider Σ in the case of a constant Hamiltonian (Eq. (32)) for a non-thermal bath that gives rise to a non-passive steady state ρss = UπssU† via the Liouvillian \({\cal L}_U\). This Σ can be related to that of a passive state, as follows. Since the relative entropy is invariant with respect to a unitary transformation of its arguments, Eq. (32) can be recast in the form
where \(\tilde \rho _0: = U^\dagger \rho _0U\). Thus, Σ equals the entropy production obtained under the relaxation of an open system from the unitarily transformed state \(\tilde \rho _0\) to the passive state πss.
In particular, when πss is the thermal state ρth, Σ equals the entropy production obtained under thermalisation of the system starting from the state \(\tilde \rho _0\) and we have
where \(\tilde {\cal E}_{\mathrm{d}}\) is the change in the energy \(\tilde E = {\mathrm{Tr}}\left[ {\tilde \rho H} \right]\) of the transformed state \(\tilde \rho\).
Consider now a slowly varying H(t) such that inequality (35) holds. The invariant state of \({\cal L}_U(t)\) now reads ρss(t) = Uρth(t)U†, with the (instantaneous) thermal state (36). Inequality (35) then yields
where the appearing integral is the generalisation of \(\tilde {\cal E}_{\mathrm{d}}\) from inequality (39). It is shown in Methods (‘Unitary equivalence of non-thermal and thermal baths’) that \(U^\dagger \dot \rho (t)U\) equals a thermal Liouvillian acting on a unitarily transformed state (Eq. (45)). Hence, also for a time-dependent Hamiltonian, the evaluation of Σ in a non-thermal bath reduces to the case of a transformed state that decays via contact with a thermal bath.
Optimality of the inequality for relative entropy
Equation (10) provides a generally tighter inequality for \(\Delta {\cal S}\) than Eq. (38) (or (32)). Indeed, Eq. (38) can be written as \(\Delta {\cal S} \ge {\cal S}\left( {\pi _{{\mathrm{ss}}}} \right) - k_{\mathrm{B}}A\), where \(A = - {\mathrm{Tr}}\left[ {\tilde \rho _0\,{\mathrm{ln}}\,\pi _{{\mathrm{ss}}}} \right]\). This inequality is the tightest (i.e., its r.h.s. is maximal) on the set of all states \(\tilde \rho _0\) which differ from ρ0 by a unitary transformation, when A is minimal on this set. Note that πss commutes with the Hamiltonian and the eigenvalues of −lnπss do not decrease as a function of the eigenvalues of the Hamiltonian. Thus, −lnπss can be considered, in a sense, as an effective ‘Hamiltonian’, for which A is the average ‘energy’ in the state \(\tilde \rho _0\). The average energy amongst unitarily accessible states is known to be minimised in the passive state. When H is non-degenerate, then the passive state π0 corresponding to H is also the passive state corresponding to the effective ‘Hamiltonian’ –lnπss; hence, A is minimal for \(\tilde \rho _0 = \pi _0\).
By contrast, if H is degenerate there is generally no unique passive state (see Methods ‘Non-passive states’). In this case, A is minimal not for each π0 but iff π0 is also a passive state of the effective ‘Hamiltonian’, i.e., iff π0 commutes with πss. One can show that there exists, at least, one such state π0. Thus, Eq. (10) provides the tightest inequality for \(\Delta {\cal S}\) among all inequalities of the form (38) or (32).
Unitary equivalence of non-thermal and thermal baths
The time evolution of an initial state ρ0 under the Liouvillian \({\cal L}_U\) as defined in Methods (‘Entropy production Σ for non-thermal baths’) may be replaced by an alternative time evolution involving a thermal bath. These two equivalent evolution paths can be lucidly represented by the diagram in Fig. 9a (see also ref. 63 and Methods ‘Master equation for a squeezed bath’). According to Fig. 9a, the evolution of ρ0 induced by a non-thermal bath towards ρss (solid arrow) may be replaced by a three-stage process (dashed arrows) wherein the system is in contact with a thermal bath only in the second step.

Different evolution paths. a The evolution of an initial state ρ0 in a non-thermal bath according to the Liouvillian \({\cal L}_{\it U}\) (solid path) is unitarily equivalent to the evolution of a state \(\tilde \rho _0\) in a thermal bath according to the Liouvillian \({\cal L}_{{\mathrm{th}}}\) (dashed path). b The steady state reached by the relaxation of a non-passive state ρ0 in a thermal bath (solid path) may also be reached by an alternative (dashed) path wherein the initial ergotropy is first removed in a unitary process
This may be shown as follows. The Liouvillian \({\cal L}_U\) in the interaction picture may be cast into the general Lindblad form46
We now consider the unitarily transformed master equation
where we have defined \(\tilde \rho : = U^\dagger \rho U\) and \(\tilde L_\alpha : = U^\dagger L_\alpha U\). The right-hand side of Eq. (42) is thus again a Lindblad superoperator, \(U^\dagger \left( {{\cal L}_U\rho } \right)U = :\tilde {\cal L}\tilde \rho\). Now, since \(\rho _{{\mathrm{ss}}} = U\rho _{{\mathrm{th}}}U^\dagger\) is the steady-state solution of \({\cal L}_U\), the state \(\tilde \rho _{{\mathrm{ss}}}: = U^\dagger \rho _{{\mathrm{ss}}}U = \rho _{{\mathrm{th}}}\) must be the steady state of \(\tilde {\cal L}\). Hence, \(\tilde {\cal L}\) has to be a thermal generator, i.e., \(\tilde {\cal L} = {\cal L}_{{\mathrm{th}}}\), and therefore
Hence, the solution of \(\dot \rho = {\cal L}_U\rho\) may be written as
If H(t) is slowly varying in time and commutes with itself at all times, we have time-dependent γ α (t) in Eq. (41)9. Since the above derivation does not depend on these rates, we have
Entropy change for time-dependent Hamiltonians
Equation (11) for a thermal bath was derived based on the alternative (dashed) path in Fig. 9b. The energies \({\cal E}_{\mathrm{d}}\) (along the original path) and \({\cal E}\prime_{\mathrm{d}}\) (along the alternative path) are those that appear on the r.h.s. of the entropic inequalities (8) and (11).
The Σ-inequality for the situation where the invariant state is non-passive is given in Eq. (40) and may be recast in the form
Owing to Eq. (45), this inequality is equivalent to
where \(\tilde \rho (t): = U^\dagger \rho (t)U\) and \({\cal L}_{{\mathrm{th}}}(t)\) is a thermal Liouvillian with the same temperature and the same H(t) as in \({\cal L}_U(t)\). The problem of a state ρ(t) that evolves subject to a non-thermal bath has thus been reduced to the problem of a state \(\tilde \rho (t)\) that evolves according to a thermal bath. This is the situation considered in the original (solid) path in Fig. 9b upon replacing ρ(t) by \(\tilde \rho (t)\) there. This yields again Eq. (11), thus extending it to the case of a non-passive invariant state.
In the general case that πss(t) is not a thermal state, inequality (46) is replaced by
One can then proceed as above, but \({\cal L}_{{\mathrm{th}}}(t)\) is then replaced by a ‘passive’ Liouvillian \({\cal L}_{{\mathrm{pas}}}(t)\) whose invariant state is πss(t). The resulting inequality for \(\Delta {\cal S}\) [the generalisation of Eq. (11), i.e., the counterpart of Eq. (10)] then reads,
where \(\varrho\)(0) = π0. Note that the latter integral cannot be identified with energy transfer. Equation (49) holds also for the case of a passive invariant state ρss(t) = πss(t), where now \({\cal L}_{{\mathrm{pas}}}(t) = {\cal L}(t)\).
Derivation of the efficiency bound
Energy conservation (Eq. (1)) over a cycle yields
where \({\cal E}_{{\mathrm{d,c}}}\) \(\left( {{\cal E}_{{\mathrm{d,h}}}} \right)\) is the dissipative energy change of the WM due to its interaction with the cold thermal (hot non-thermal) bath (Fig. 4). As mentioned in the main text, we assume that the WM is thermal and hence passive prior to its interaction with the cold thermal bath.
The efficiency of the engine is defined as the ratio of the extracted work to the invested energy (passive thermal energy and ergotropy) \({\cal E}_{{\mathrm{d,h}}} = {\int}_0^\infty {\mathrm{Tr}}\left[ {\left( {{\cal L}_U(t)\rho (t)} \right)H(t)} \right]{\mathrm{d}}t\) provided by the non-thermal bath, yielding
This expression holds for \({\cal E}_{{\mathrm{d,c}}} \le 0\) and \({\cal E}_{{\mathrm{d,h}}} \ge 0\); see below a discussion of the opposite case. From condition (13) it then follows that
Inserting this relation into (51) yields the efficiency bound (14).
The efficiency bound (14) may be generalised to the case where the passive state of the working medium is not thermal after the interaction with the non-thermal bath. Condition (13) is then, following Eq. (49), replaced by
and we then find
where the integral is evaluated for the energising stroke.
If \({\cal E}_{{\mathrm{d,c}}} >0\) \(\left( {{\cal E}\prime_{{\mathrm{d,h}}} < 0} \right)\), then also the cold bath provides energy, which has to be taken into account in the efficiency. The latter now reads32
which cannot be further restricted by any inequality for \(\Delta {\cal S}\).
We now derive the efficiency bound that follows from the reversibility condition (7). The requirement of vanishing entropy change over a cycle then yields
where \(\tilde {\cal E}_{{\mathrm{d,h}}}\) (the integral in Eq. (40)) is the energy change during the interaction with the thermal bath along the dashed path in Fig. 9a. Consequently, according to this criterion the efficiency (51) is bounded by
This bound surpasses 1 if \(\tilde {\cal E}_{{\mathrm{d,h}}} < 0\), which, e.g., is the case if the bath is ‘over-squeezed’: This means that, due to the excessive bath squeezing, the interaction with the thermal bath along the alternative path of Fig. 9a decreases the energy while that with the non-thermal bath along the initial path increases it.
If the Hamiltonian is constant during the energising stroke, then \(\tilde {\cal E}_{{\mathrm{d,h}}} = \Delta \left. {E_{{\mathrm{pas,h}}}} \right|_{\mathrm{d}} + \widetilde {\left. {\Delta {\cal W}} \right|_{\mathrm{d}}}\), where \(\widetilde {\left. {\Delta {\cal W}} \right|_{\mathrm{d}}} \le 0\) is the ergotropy lost to the effective thermal bath in the second step of the alternative path in Fig. 9a. A comparison of Eq. (57) with our bound Eq. (16) for a constant Hamiltonian then yields \(\eta _{{\mathrm{max}}}^{{\mathrm{Otto}}} \le \eta _\Sigma\).
Maximal efficiency of multi-bath quantum engines
We consider a cycle operating between N thermal baths (either heat sources or heat dumps) and M non-thermal baths that are assumed to energise the engine. Namely, the non-thermal baths provide both passive energy and ergotropy to the working medium. As before (see main text and Methods ‘Derivation of the efficiency bound’) we assume that the strokes are sufficiently long such that Eq. (11) is valid and that the ergotropy of the working medium is extracted before every stroke that involves a bath.
For this situation, Eq. (13) can be generalised to
Here the temperatures of the thermal baths are denoted by T i and the temperature parameters of the non-thermal baths by Th,i. Note that under the assumptions made above \({\cal E}\prime_{{\mathrm{d,h,}}i} \ge 0\) and that for thermal baths \({\cal E}_{{\mathrm{d,}}i} \equiv {\cal E}\prime_{{\mathrm{d,}}i}\).
By introducing the minimum and maximum temperatures Tmin ≤ {T i , Th,i} ≤ Tmax, we obtain2
Hence, we have the relation
The efficiency of the multi-bath engine is
where
is the total energy that the working medium obtained from the energising baths during a cycle. Owing to Eq. (60), the efficiency (61) is bounded by
Note that the equality sign in Eq. (63) is only fulfilled if both equality signs in Eq. (59) hold. In particular, Eq. (63) is a strict inequality in the multi-bath case, i.e., if more than two temperatures appear in Eq. (58).
Inequality (63) is the generalisation of Eq. (14) to more than one energising bath. The efficiency of multi-bath engines is thus always lower than the maximum efficiency of a two-bath engine that operates between a cold thermal bath at temperature Tmin and a hot non-thermal bath at temperature parameter Tmax which results in the same ratio \({\cal E}\prime_{{\mathrm{d,in}}}\)/\({\cal E}_{{\mathrm{d,in}}}\) of the input energies. This also holds in the case that the first equality sign in Eq. (59) is fulfilled, which in the case of thermal baths corresponds to the second law and hence the reversibility condition.
The efficiency bound (63) thus contains as a special case the fact that the efficiency of multi-bath heat engines (i.e., the case where all the baths are thermal such that \({\cal E}\prime_{{\mathrm{d,in}}} \equiv {\cal E}_{{\mathrm{d,in}}}\)) is always lower than the Carnot efficiency determined by the minimium and the maximum temperatures of the cycle, even if the cycle is reversible2. In this sense, our bound (14) is universal.
The above considerations hold for the case \({\cal E}\prime_{{\mathrm{d,h,}}i} \ge 0\). As discussed in Methods (‘Derivation of the efficiency bound’) for the two-bath situation, in the case that \({\cal E}\prime_{{\mathrm{d,h}}} < 0\) the two-bath engine operates at efficiency η = 1 (Eq. (55)), which obviously cannot be surpassed by any engine powered by multiple thermal or non-thermal baths.
Expressions used in Fig. 8
In Fig. 8, we have used the energies
Here ωc (ωh) is the oscillator frequency before (after) the compression stroke. Furthermore, we have defined \(\bar n_i = \left[ {{\mathrm{exp}}\left( {\hbar \omega _i{\mathrm{/}}\left[ {k_{\mathrm{B}}T_i} \right]} \right) - 1} \right]^{ - 1}\) and \(\Delta \bar n_i = \left( {2\bar n_i + 1} \right){\mathrm{sinh}}^2(r)\) for i ∈ {c, h}, where r denotes the squeezing parameter46. Using the energies (64)–(66), the efficiency bounds ηΣ (Eq. (57)) and ηmax (Eq. (16)) then evaluate to
and
respectively. Additionally, we have used the actual efficiency32
which is valid for \({\cal E}_{{\mathrm{d,c}}} \le 0\), i.e., \(\bar n_{\mathrm{c}} \le \bar n_{\mathrm{h}}\). For \(\bar n_{\mathrm{h}} \le \bar n_{\mathrm{c}} \le \bar n_{\mathrm{h}} + \Delta \bar n_{\mathrm{h}}\) the efficiency evaluates to η = 1. The machine acts as an engine for \({\cal E}_{{\mathrm{d,h}}} \ge 0\), i.e., for \(\bar n_{\mathrm{h}} + \Delta \bar n_{\mathrm{h}} \ge \bar n_{\mathrm{c}}\), which for the parameters of Fig. 8 corresponds to \(\omega _{\mathrm{c}}{\mathrm{/}}\omega _{\mathrm{h}}\) ≳ 0.22.
Data availability
All relevant data are available from the authors.
References
Carnot, S. Réflexions sur la puissance motrice du feu et sur les machines propres à développer cette puissance (Bachelier, Paris, 1824).
Schwabl, F. Statistical Mechanics, 2nd edn (Springer-Verlag, Berlin, Heidelberg, 2006).
Kondepudi, D. & Prigogine, I. Modern Thermodynamics, 2nd edn (John Wiley & Sons Ltd, Chichester, 2015).
Clausius, R. Ueber verschiedene für die Anwendung bequeme Formen der Hauptgleichungen der mechanischen Wärmetheorie. Ann. Phys. 201, 353–400 (1865).
Callen, H. B. Thermodynamics and An Introduction to Thermostatistics, 2nd edn (John Wiley & Sons, Inc, New York, 1985).
Scovil, H. E. D. & Schulz-DuBois, E. O. Three-level masers as heat engines. Phys. Rev. Lett. 2, 262–263 (1959).
Pusz, W. & Woronowicz, S. L. Passive states and KMS states for general quantum systems. Commun. Math. Phys. 58, 273–290 (1978).
Lenard, A. Thermodynamical proof of the Gibbs formula for elementary quantum systems. J. Stat. Phys. 19, 575–586 (1978).
Alicki, R. The quantum open system as a model of the heat engine. J. Phys. A 12, L103–L107 (1979).
Scully, M. O., Zubairy, M. S., Agarwal, G. S. & Walther, H. Extracting work from a single heat bath via vanishing quantum coherence. Science 299, 862–864 (2003).
Allahverdyan, A. E., Balian, R. & Nieuwenhuizen, T. M. Maximal work extraction from finite quantum systems. Europhys. Lett. 67, 565–571 (2004).
Erez, N., Gordon, G., Nest, M. & Kurizki, G. Thermodynamic control by frequent quantum measurements. Nature 452, 724–727 (2008).
Del Rio, L., Åberg, J., Renner, R., Dahlsten, O. & Vedral, V. The thermodynamic meaning of negative entropy. Nature 474, 61–63 (2011).
Horodecki, M. & Oppenheim, J. Fundamental limitations for quantum and nanoscale thermodynamics. Nat. Commun. 4, 2059 (2013).
Correa, L. A., Palao, J. P., Alonso, D. & Adesso, G. Quantum-enhanced absorption refrigerators. Sci. Rep. 4, 3949 (2014).
Skrzypczyk, P., Short, A. J. & Popescu, S. Work extraction and thermodynamics for individual quantum systems. Nat. Commun. 5, 4185 (2014).
Brandão, F., Horodecki, M., Ng, N., Oppenheim, J. & Wehner, S. The second laws of quantum thermodynamics. Proc. Natl. Acad. Sci. USA 112, 3275–3279 (2015).
Pekola, J. P. Towards quantum thermodynamics in electronic circuits. Nat. Phys. 11, 118–123 (2015).
Uzdin, R., Levy, A. & Kosloff, R. Equivalence of quantum heat machines, and quantum-thermodynamic signatures. Phys. Rev. X 5, 031044 (2015).
Campisi, M. & Fazio, R. The power of a critical heat engine. Nat. Commun. 7, 11895 (2016).
Roßnagel, J. et al. A single-atom heat engine. Science 352, 325–329 (2016).
Kosloff, R. Quantum thermodynamics: a dynamical viewpoint. Entropy 15, 2100–2128 (2013).
Gelbwaser-Klimovsky, D., Niedenzu, W. & Kurizki, G. Thermodynamics of quantum systems under dynamical control. Adv. At. Mol. Opt. Phys. 64, 329–407 (2015).
Goold, J., Huber, M., Riera, A., del Rio, L. & Skrzypczyk, P. The role of quantum information in thermodynamics—a topical review. J. Phys. A 49, 143001 (2016).
Vinjanampathy, S. & Anders, J. Quantum thermodynamics. Contemp. Phys. 57, 1–35 (2016).
Kosloff, R. & Rezek, Y. The quantum harmonic Otto cycle. Entropy 19, 136 (2017).
Dillenschneider, R. & Lutz, E. Energetics of quantum correlations. Europhys. Lett. 88, 50003 (2009).
Huang, X. L., Wang, T. & Yi, X. X. Effects of reservoir squeezing on quantum systems and work extraction. Phys. Rev. E 86, 051105 (2012).
Abah, O. & Lutz, E. Efficiency of heat engines coupled to nonequilibrium reservoirs. Europhys. Lett. 106, 20001 (2014).
Roßnagel, J., Abah, O., Schmidt-Kaler, F., Singer, K. & Lutz, E. Nanoscale heat engine beyond the Carnot limit. Phys. Rev. Lett. 112, 030602 (2014).
Hardal, A. Ü. C. & Müstecaplıoğlu, Ö. E. Superradiant quantum heat engine. Sci. Rep. 5, 12953 (2015).
Niedenzu, W., Gelbwaser-Klimovsky, D., Kofman, A. G. & Kurizki, G. On the operation of machines powered by quantum non-thermal baths. New. J. Phys. 18, 083012 (2016).
Manzano, G., Galve, F., Zambrini, R. & Parrondo, J. M. R. Entropy production and thermodynamic power of the squeezed thermal reservoir. Phys. Rev. E 93, 052120 (2016).
Klaers, J., Faelt, S., Imamoglu, A. & Togan, E. Squeezed thermal reservoirs as a resource for a nanomechanical engine beyond the Carnot limit. Phys. Rev. X 7, 031044 (2017).
Agarwalla, B. K., Jiang, J.-H. & Segal, D. Quantum efficiency bound for continuous heat engines coupled to noncanonical reservoirs. Phys. Rev. B 96, 104304 (2017).
Dağ, C. B., Niedenzu, W., Müstecaplıoğlu, Ö. E. & Kurizki, G. multiatom quantum coherences in micromasers as fuel for thermal and nonthermal machines. Entropy 18, 244 (2016).
Alicki, R., Horodecki, M., Horodecki, P. & Horodecki, R. Thermodynamics of quantum information systems-Hamiltonian description. Open. Syst. Inf. Dyn. 11, 205–217 (2004).
Boukobza, E. & Tannor, D. J. Three-level systems as amplifiers and attenuators: a thermodynamic analysis. Phys. Rev. Lett. 98, 240601 (2007).
Parrondo, J. M. R., den Broeck, C. V. & Kawai, R. Entropy production and the arrow of time. New. J. Phys. 11, 073008 (2009).
Deffner, S. & Lutz, E. Nonequilibrium entropy production for open quantum systems. Phys. Rev. Lett. 107, 140404 (2011).
Boukobza, E. & Ritsch, H. Breaking the Carnot limit without violating the second law: a thermodynamic analysis of off-resonant quantum light generation. Phys. Rev. A 87, 063845 (2013).
Sagawa, T. in Lectures on Quantum Computing, Thermodynamics and Statistical Physics (eds Nakahara, M. & Tanaka, S.) 125–190 (World Scientific, Singapore, 2013).
Argentieri, G., Benatti, F., Floreanini, R. & Pezzutto, M. Violations of the second law of thermodynamics by a non-completely positive dynamics. Europhys. Lett. 107, 50007 (2014).
Binder, F., Vinjanampathy, S., Modi, K. & Goold, J. Quantum thermodynamics of general quantum processes. Phys. Rev. E 91, 032119 (2015).
Brandner, K. & Seifert, U. Periodic thermodynamics of open quantum systems. Phys. Rev. E 93, 062134 (2016).
Breuer, H.-P. & Petruccione, F. The Theory of Open Quantum Systems (Oxford University Press, Oxford, 2002).
Spohn, H. Entropy production for quantum dynamical semigroups. J. Math. Phys. 19, 1227–1230 (1978).
Anders, J. & Giovannetti, V. Thermodynamics of discrete quantum processes. New. J. Phys. 15, 033022 (2013).
Alicki, R. & Fannes, M. Entanglement boost for extractable work from ensembles of quantum batteries. Phys. Rev. E 87, 042123 (2013).
Gelbwaser-Klimovsky, D., Alicki, R. & Kurizki, G. Work and energy gain of heat-pumped quantized amplifiers. Europhys. Lett. 103, 60005 (2013).
Hovhannisyan, K. V., Perarnau-Llobet, M., Huber, M. & Acín, A. Entanglement generation is not necessary for optimal work extraction. Phys. Rev. Lett. 111, 240401 (2013).
Binder, F. C., Vinjanampathy, S., Modi, K. & Goold, J. Quantacell: powerful charging of quantum batteries. New. J. Phys. 17, 075015 (2015).
Perarnau-Llobet, M. et al. Extractable work from correlations. Phys. Rev. X 5, 041011 (2015).
Skrzypczyk, P., Silva, R. & Brunner, N. Passivity, complete passivity, and virtual temperatures. Phys. Rev. E 91, 052133 (2015).
Brown, E. G., Friis, N. & Huber, M. Passivity and practical work extraction using Gaussian operations. New. J. Phys. 18, 113028 (2016).
De Palma, G., Mari, A., Lloyd, S. & Giovannetti, V. Passive states as optimal inputs for single-jump lossy quantum channels. Phys. Rev. A. 93, 062328 (2016).
Bruschi, D. E. On the gravitational nature of energy. Preprint at https://arxiv.org/abs/1701.00699 (2017).
Levy, A., Diósi, L. & Kosloff, R. Quantum flywheel. Phys. Rev. A. 93, 052119 (2016).
Mari, A., Giovannetti, V. & Holevo, A. S. Quantum state majorization at the output of bosonic Gaussian channels. Nat. Commun. 5, 3826 (2014).
Gardiner, C. W. & Zoller, P. Quantum Noise, 2nd edn (Springer-Verlag, Berlin, 2000).
Alipour, S. et al. Correlations in quantum thermodynamics: heat, work, and entropy production. Sci. Rep. 6, 35568 (2016).
Schlögl, F. Zur statistischen Theorie der Entropieproduktion in nicht abgeschlossenen Systemen. Z. Phys. 191, 81–90 (1966).
Ekert, A. K. & Knight, P. L. Canonical transformation and decay into phase-sensitive reservoirs. Phys. Rev. A. 42, 487–493 (1990).
Gelbwaser-Klimovsky, D., Alicki, R. & Kurizki, G. Minimal universal quantum heat machine. Phys. Rev. E 87, 012140 (2013).
Mukherjee, V., Niedenzu, W., Kofman, A. G. & Kurizki, G. Speed and efficiency limits of multilevel incoherent heat engines. Phys. Rev. E 94, 062109 (2016).
Erker, P. et al. Autonomous quantum clocks: does thermodynamics limit our ability to measure time? Phys. Rev. X 7, 031022 (2017).
Woods, M. P., Silva, R. & Oppenheim, J. Autonomous quantum machines and finite sized clocks. Preprint at https://arxiv.org/abs/1607.04591 (2016).
Graham, R. Squeezing and frequency changes in harmonic oscillations. J. Mod. Opt. 34, 873–879 (1987).
Agarwal, G. S. & Kumar, S. A. Exact quantum-statistical dynamics of an oscillator with time-dependent frequency and generation of nonclassical states. Phys. Rev. Lett. 67, 3665–3668 (1991).
Averbukh, I., Sherman, B. & Kurizki, G. Enhanced squeezing by periodic frequency modulation under parametric instability conditions. Phys. Rev. A. 50, 5301–5308 (1994).
Geva, E. & Kosloff, R. A quantum-mechanical heat engine operating in finite time. A model consisting of spin-1/2 systems as the working fluid. J. Chem. Phys. 96, 3054–3067 (1992).
Feldmann, T. & Kosloff, R. Characteristics of the limit cycle of a reciprocating quantum heat engine. Phys. Rev. E 70, 046110 (2004).
Quan, H. T., Liu, Y.-x., Sun, C. P. & Nori, F. Quantum thermodynamic cycles and quantum heat engines. Phys. Rev. E 76, 031105 (2007).
del Campo, A., Goold, J. & Paternostro, M. More bang for your buck: super-adiabatic quantum engines. Sci. Rep. 4, 6208 (2014).
Hatano, T. & Sasa, S.-i. Steady-state thermodynamics of Langevin systems. Phys. Rev. Lett. 86, 3463–3466 (2001).
Gardas, B. & Deffner, S. Thermodynamic universality of quantum Carnot engines. Phys. Rev. E 92, 042126 (2015).
Misra, A., Singh, U., Bera, M. N. & Rajagopal, A. K. Quantum Rényi relative entropies affirm universality of thermodynamics. Phys. Rev. E 92, 042161 (2015).
Qi, H., Wilde, M. M. & Guha, S. Thermal states minimize the output entropy of single-mode phase-insensitive Gaussian channels with an input entropy constraint. Preprint at https://arxiv.org/abs/1607.05262 (2016).
Acknowledgements
We thank the ISF, AERI and VATAT for support.
Author information
Authors and Affiliations
Contributions
W.N. conceived the idea. W.N. and A.G.K. performed the calculations. W.N. implemented and performed the numerical simulations. W.N., V.M., A.G., A.G.K. and G.K. contributed to the discussion and the interpretation of the results. All authors were involved in the discussion during the writing of the manuscript. W.N., A.G.K. and G.K. wrote the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Niedenzu, W., Mukherjee, V., Ghosh, A. et al. Quantum engine efficiency bound beyond the second law of thermodynamics. Nat Commun 9, 165 (2018). https://doi.org/10.1038/s41467-017-01991-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-017-01991-6
This article is cited by
-
Black-hole powered quantum coherent amplifier
npj Quantum Information (2024)
-
Quantum otto machine in Lipkin-Meshkov-Glick model with magnetic field and a symmetric cross interaction
Optical and Quantum Electronics (2024)
-
A quantum engine in the BEC–BCS crossover
Nature (2023)
-
Introduction to quantum thermodynamic cycles
Journal of Chemical Sciences (2023)
-
Quantum Heat Engine with Level Degeneracy for Oscillator-shaped Potential Well
International Journal of Theoretical Physics (2023)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
