
Abstract
Microelectromechanical systems (MEMS) are of considerable interest due to their compact size and low power consumption when used in modern electronics. MEMS devices intrinsically incorporate three-dimensional (3D) microstructures for their intended operations; however, these microstructures are easily broken by mechanical shocks accompanying high-magnitude transient acceleration, inducing device malfunction. Although various structural designs and materials have been proposed to overcome this limit, developing a shock absorber for easy integration into existing MEMS structures that effectively dissipates impact energy remains challenging. Here, a vertically aligned 3D nanocomposite based on ceramic-reinforced carbon nanotube (CNT) arrays is presented for in-plane shock-absorbing and energy dissipation around MEMS devices. This geometrically aligned composite consists of regionally-selective integrated CNT arrays and a subsequent atomically thick alumina layer coating, which serve as structural and reinforcing materials, respectively. The nanocomposite is integrated with the microstructure through a batch-fabrication process and remarkably improves the in-plane shock reliability of a designed movable structure over a wide acceleration range (0–12,000g). In addition, the enhanced shock reliability through the nanocomposite was experimentally verified through comparison with various control devices.
Similar content being viewed by others


Introduction
With rapid advances in the Internet of Things (IoT), electric vehicles, and mobile technologies, there has been an increasing need for miniaturized electronics, with sizes and power consumption less than those of current devices1. Microelectromechanical systems (MEMS) are of great interest as essential components of such electronics for use in wireless communication, environment monitoring and inertial sensing2,3,4. Unlike solid-state devices such as semiconductor-based sensors and transistors, MEMS devices contain microstructures in which mechanical stress is inevitably induced during functional performance. Certain commercially available MEMS devices, including accelerometers, gyroscopes, optical mirrors, and radio frequency (RF) modules, include movable microstructures suspended on microbeams that are susceptible to damage via mechanical stress5.
Mechanical shock, a transient mechanical excitation accompanying a high-magnitude acceleration in an extremely short time, induces mechanical stress in a microbeam due to the abrupt force applied to the movable structure. Mechanical stress often causes malfunction and failure of MEMS devices owing to crack propagation or fracture in the microbeam, where stress is applied over the yield stress of the structural material6. The high-magnitude acceleration induced by the shock easily exceeds the critical value of the yield stress in typical applications upon exposure to a high-shock environment. For example, when portable devices are accidentally dropped (from a sufficient height) by a customer, the acceleration value can reach up to 5000g based on the hardness of the surface on which they land7. In addition, MEMS devices for automotive applications require high reliability with an acceleration of more than 20,000g, as may be induced in a sudden traffic accident8. Furthermore, device reliability should be guaranteed even at an acceleration of up to approximately 100,000g to realize the use of MEMS devices in harsh-environment machinery for military, aerospace, and oil and gas drilling industries9,10.
In terms of structural design, simply increasing the stiffness of the beam is ineffective because it degrades device performance, specifically parameters including sensitivity, operating range, and resolution11. A straightforward strategy that has been adopted to protect a microstructure is to add a structure that limits excessive displacement, namely, a hard stop12. Integrating the hard stop in MEMS suppresses the bending stress exceeding the yield stress at the susceptible position, such as the anchor part of the beam. However, when acceleration is applied to the movable structure, the impact at the hard stop causes a secondary shock, leading to additional problems, including undesired oscillation and debris generation due to the mechanical contact with the bump stop under high acceleration13. Moreover, the secondary shock induces additional stress on the beam, which can cause fractures at different positions, such as the supporting part of the movable structure. Therefore, alleviating the impact force between the movable structure and the hard stop is imperative to protect the movable structure and improve the reliability of the device. When shock with specific kinetic energy is applied, the impact force can be reduced by increasing the contact time or decreasing the coefficient of restitution (COR), as determined by structural and material characteristics. Accordingly, several researchers have introduced structural modifications of the hard stop to increase the contact time. They reduced the magnitude of the impact force and improved the shock reliability of microdevices by utilizing deformable microstructures such as compliant nonlinear springs14, flexible stops15, latching stops16,17, and cascade beams18. In terms of energy dissipation, some researchers have proposed various materials with low COR as contact materials, that is, shock absorbers19. Typically, used Si and SiO2 for MEMS devices have high CORs of 0.7 and 0.96, respectively19; however, soft materials, including ductile metals and soft polymers, have low CORs from 0.22 to 0.3620. Thus, researchers have improved the shock reliability of their devices by introducing these soft materials as shock absorbers in various forms, including thin films, glass beads, and solder balls14,20,21.
Moreover, three-dimensional (3D) nanoscale lattices have recently attracted great interest as structural materials for mechanical energy dissipation22,23,24. Their periodically patterned 3D structure results in outstanding mechanical resilience and high damping capability suitable for a shock-energy absorber; however, large-scalable and cost-effective fabrication methods are still lacking owing to their complex and serial processes. Therefore, it is essential to develop mass-producible and batch-processable manufacturing processes that can be integrated into microstructures for practical use in electronics with high shock reliability. Herein, we present a vertically aligned 3D nanocomposite based on ceramic-reinforced carbon nanotube (CNT) arrays for the in-plane shock absorption and energy dissipation materials of MEMS. This geometrically nanostructured composite consists of synthesized region-selective CNT arrays and an alumina (Al2O3) layer coated with an atomic thickness, serving as structural and reinforcing materials, respectively. The nanocomposite, integrated with the microstructure through batch-fabrication processes, remarkably improved the in-plane shock reliability of a proof mass, which is a designed movable structure, over a wide acceleration range (0–12,000g). When abrupt acceleration is applied, the mechanical deformability of the aligned CNT array, which as a cushioning structure, increases the contact time25. At the same time, the thin layer-coated Al2O3 reinforces the mechanical resilience of the composite by suppressing the internal adhesion force between the individual nanocomposite strands. We experimentally verified that the nanocomposite provides an improved shock absorption capability by comparison with various control devices, including a hard stop, a spring stop, and a CNT-based stop without ceramic layer reinforcement, as reported in the literature. In addition, after applying excessive acceleration loads, we investigated the change in the structural characteristics of both the nanocomposite and the microstructure to identify their failure mechanism.
Results
Design and fabrication
Figure 1a shows a schematic illustration of the nanocomposite-based shock absorber with a proof mass suspended on a microbeam. The shock absorber consists of a compliant spring, fixed anchor, and a nanocomposite material that fills the gaps between them. Note that the beam supporting the proof mass is referred to as a microbeam, and the beam colliding with the proof mass is referred to as a spring. We considered three structural concepts utilizing nanocomposites to improve the shock reliability of movable structures, which are referred to as friction-based, fastening-type, and compression-based shock absorbers, respectively, as reported in our previous studies26,27. First, we exploit the frictional contact at the interface between the nanocomposite arrays to dissipate the mechanical shock energy by Coulomb damping. Figures 1b and 1c show a schematic diagram of a friction-based shock absorber and its mechanism, respectively. As depicted in Fig. 1b, the nanocomposite is directly integrated into interdigitated microstructures to form parallel linear contact interfaces. When frictional contact occurs at the interface, the shock energy is dissipated through frictional damping, as illustrated in Fig. 1c. The compliant spring is then restored at the position where the static frictional force is made equal to the restoring force of the spring. The second concept is a fastening-type shock absorber that simultaneously induces the bending and compression of the nanocomposite due to frictional force while reducing the gap between interdigitated structures during impact loading. Figure 1d, e shows the schematic diagram and mechanism of the fastening-type shock absorber with the nanocomposite. When a shock is applied, the gap closing induces compressive deformation in the nanocomposite by the normal load while also causing bending of the individual composite strands by the shear force due to the frictional force at the interface. This mechanical behavior of nanocomposites leads to both shock energy dissipation and increasing contact time because of the bending and compression of the nanocomposite, respectively, as shown in Fig. 1e. Finally, the compression-based shock absorber is considered the third concept of the shock absorber, as shown in Fig. 1f, g. When a collision occurs between the proof mass and the compliant spring, the high aspect ratio of the aligned structure enables compressive deformation in the nanocomposite28. As a result, the shock energy was dissipated during the compressive deformation, which decreased the maximum value of acceleration applied to the proof mass as the contact time increased. Then, the compressed nanocomposite regains its original state owing to reinforcement with Al2O3 after the position of the proof mass is restored.

a A schematic illustration of the nanocomposite-based shock absorbers with a proof mass suspended on a microbeam. Illustrations of the shock absorbing mechanism by using b, c friction-based, d, e fastening-type, and f, g compression-based shock absorbers, respectively. The nanocomposite arrays are directly synthesized in the sidewall of the confined microstructures and form the linear contact interface
Characteristics of shock absorbers with nanocomposites
To confirm the successful integration of the nanocomposite in the fabricated microstructure, we investigated the morphological characteristics of the shock absorbers using scanning electron microscopy (SEM). We describe the specific fabrication process in the “Experimental Section” and Fig. S1. Figure 2a–c shows the SEM images of the proposed shock absorbers with Al2O3-coated CNT arrays. The enlarged SEM images in Fig. 2a–c and Fig. S2 show that the aligned Al2O3–carbon nanotube arrays were successfully synthesized in the designated sidewalls, forming linear contact interfaces in the confined microstructures29. As shown in the SEM images of Fig. 2a–c and Fig. S3, we confirmed that the conformal coating of the Al2O3 layer with a thickness of 2 nm did not cause a structural change in the aligned composite arrays.

Scanning electron microscope (SEM) images of a friction-based, b fastening-type, and c compression-based shock absorbers with Al2O3-coated CNT arrays. The scale bars are 50 and 10 μm. d, e SEM images of a hard stop and a spring stop as a control device, respectively. The scale bar is 200 μm. f A transmission electron microscopy (TEM) image of the nanocomposite with the Al2O3 layer indicating the uniform coating of the individual CNTs. The scale bar is 5 nm
To investigate the effect of introducing the nanocomposites, we prepared specimens with a hard stop and a spring stop as a control device. Figure 2d, e shows SEM images of a hard stop and a spring stop, adopting the structure design in the previously reported literature14. We also monitored individual composite strands to determine the uniformity of the Al2O3 coating. Figure 2f shows a transmission electron microscopy (TEM) image of the composite, confirming that Al2O3 uniformly coated all the surfaces of individual CNTs, which is consistent with previously reported findings in the literature verifying that the Al2O3 layer with a target thickness of 2 nm or more conformably covers CNT arrays through TEM analysis28,30.
Discussion
Shock reliability test of shock absorbers
Crucially, we experimentally measured the shock reliability of various shock absorbers over a wide acceleration range (0–12,000g). We prepared 56 specimens, 7 per each design, including 3 types of composite-based absorbers, 3 types of bare CNT-based absorbers, spring stops, and hard stops. The specimen chips (9 mm × 9 mm) consisted of shock absorbers with nanocomposites, a spring stop, or a hard stop as control devices and were mounted on a vertically falling carriage with guide rails. Figure S4 and Table S1 show the details of the design parameters and dimensions of the tested specimens. Then, the carriage was dropped on an aluminum-based hard substrate while controlling the drop height (see Fig. S5 for the experimental setup). The acceleration was measured using a commercially available piezoelectric accelerometer (350D02, PCB Piezotronics) that was mechanically fixed to the carriage through a tapped hole with a screw on the accelerometer. The acceleration data were extracted with the highest amplitude value of the shock-induced oscillation response within a sinusoidal half period of approximately 50 μs, as shown in Fig. S6.
Figure 3a shows the survival rate curves of all specimens with respect to the applied acceleration. The curves were fitted with a Weibull distribution to predict the failure rate of the devices as a function of shock exposure (see Fig. S7 and Table S2 for the specific acceleration values and the fitted parameters of the Weibull distribution). Among the parameters of the Weibull distribution, α is the acceleration at which 36.79% of the devices survive. Additionally, β is the Weibull modulus representing the slope of the curve. Specifically, when β is larger than 1, the failure rate increases with respect to an input parameter, an acceleration in our work. Additionally, the prediction of the failure becomes more accurate, and the error decreases as the value of β increases. The survival rate data indicate that the shock absorbers with the nanocomposite exhibit high shock-absorbing capability compared to the Si-based spring stop and the hard stop. Additionally, it was observed that the survival rate of the shock absorbers with the nanocomposite was higher than that with bare CNTs at a high acceleration of up to 12,000g. The fracture occurred in the microbeam suspending the proof mass in all specimens aftershock with an acceleration over 12,000g was applied, as shown in the inset of Fig. 3a. To investigate the fracture mechanism of the microbeams supporting the proof mass, we investigated the broken specimens after the shock survival test. In the specimens with the nanocomposite, the majority of the fracture occurred at the middle position of the microbeam, as shown in the SEM images of Fig. 3b, c. During the collision, the concentrated stress at the tip is seemingly reduced by the deformable nanocomposite. These deformable composites provide shock energy dissipation capability with increased contact time compared with those of the control devices. Moreover, both ends of the beam are fixed due to the contact between the proof mass and the shock absorber with the nanocomposites. Then, the shock-induced stress is concentrated in the middle of the beam. Thus, when an excessive acceleration of over 12,000g was loaded, the shock-induced stress in the middle of the beam was higher than the critical yield stress, leading to fracture in the middle of the beam. Furthermore, we observed the cross-sectional area of the broken beam. In contrast, in the case of two control devices (a hard stop and a spring stop), fractures occurred at the tip of the microbeam where the proof mass was supported. When collision occurred between the proof mass and the Si structure, it induced an impact force concentrated at the tip of the microbeam. These observed failure mechanisms of the control devices are consistent with previously reported studies14.

a The surv ival rate curves of all specimens (56 specimens) with respect to the applied acceleration. The insets of a are representative optical images of a specimen before and after the shock test. The curves are fitted with a Weibull distribution to predict the failure rate of the devices as a function of shock exposure. b, c SEM images of the cross-sectional area of the fractured microbeam after the shock test. The scale bars in b and c are 100 and 50 μm, respectively. The scale bars in the enlarged images b, c are 5 μm. d The mean values and standard errors of the fracture acceleration. e–g Weibull distribution-fitted survival rate curves indicating the difference in the survival rate of the specimen with the nanocomposite, the bare CNT, and the spring stop in the case of e friction-based, f fastening-type, and g compression-based shock absorbers, respectively
Figure 3d shows the mean values and standard errors of the fracture acceleration data. Among the devices with nanocomposites integrated into various structures, the compression-based shock absorber was observed to withstand the highest shock acceleration. Both the bare CNT array and alumina-reinforced composite exhibit mechanical deformability due to the high aspect ratio28,31. This mechanical deformability allows the fastening-type and compression-based shock absorbers to retain the increased mean value of the fracture acceleration at high acceleration. Specifically, the fastening-type shock absorbers with the nanocomposite and the bare CNTs exhibit 70%, and 53% increased mean values of the fracture acceleration compared to that of the hard stop, respectively. Additionally, the compression-based shock absorbers with the nanocomposite and bare CNTs show 115% and 44% increases in the mean value of the fracture acceleration compared to that of the hard stop, respectively. Regarding the friction-based shock absorbers, the improvement in shock stability due to the Al2O3 layer was negligible compared to the spring stop. Additionally, introducing Al2O3 does not lead to an improvement in the survival rate of the shock absorber with CNT arrays. This result is attributed to the low surface energy of the Al2O3 layer28,32, which leads to a low adhesion force of the Al2O3-coated composites, unlike that of the bare CNT array, decreasing the frictional damping at the contact interfaces. Therefore, the survival rate curves show that the friction-based absorbers with the composite indicate lower durability to the shock than those with the bare CNTs due to the decrease in the dissipated shock energy, as shown in Fig. 3e. The friction-based shock absorber demonstrated the lowest shock reliability among the nanocomposite-based absorbers but still exhibited a higher survival rate than that of the control devices. The relatively low survival rate of the friction-based absorber indicates that Coulomb damping generated from frictional contact effectively dissipated the impact energy, but the movable displacement of the proof mass was larger than that of other devices. Thus, it appears that the stress applied to the beam deformation exceeded the critical value of the yield stress of the beam.
Furthermore, the low adhesion force of the individual composite strand prevents permanent deformation and buckling in the nanocomposite arrays. In the bare CNT arrays, when the mechanical shock was applied, permanent deformation occurred due to the high adhesion force between individual strands. In contrast, the low adhesion of the Al2O3 layer enables the restoration of its original state even after excessive deformation by providing mechanical resilience to the nanocomposite array, which is consistent with the results of previous studies28. Therefore, the resilient and deformable nanocomposite allows the fastening-type and compression-based shock absorbers to have an increased survival rate at high acceleration, as shown in Fig. 3f, g. The fastening-type and compression-based shock absorbers with the nanocomposite show 11% and 49% increased acceleration values compared to those based on bare CNT arrays without the Al2O3 coating, respectively. Among these samples, the compression-based shock absorbers with the nanocomposite show the highest durability compared to the other specimens. It appears that the designed microstructure of the shock absorber induced compressive buckling of the nanomaterials during the collision. Therein, the buckled nanocomposite could be extremely deformed to provide a larger absorbing capacity for mechanical shock.
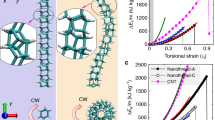
We sought to estimate the degree of energy absorption and compare it to previous literature. The calculated mass density of each Al2O3–CNT strand is 2.171 × 10−15 g/m3, based on a case similar to our synthesis method and considering that the mass densities of Al2O3 and the multiwall CNT are 3.95 and 1.74 g/cm3, respectively33. Additionally, we assume that the height of the nanotube bundles is 2.5 μm, determined by the designated gap, and the estimated number density of nanotube arrays is 1010–1011 cm−2 34,35. Moreover, the measured diameter of the CNTs is 10 nm, the targeted coating thickness of the Al2O3 layer is 2 nm, and the designated size of the Al2O3–CNT-integrated area is 200 × 50 μm2. Based on the previous reports28 of the volume-normalized energy absorption amount of the aligned Al2O3–CNT and the bar CNT compression, we estimate the energy absorption density of Al2O3–CNTs and bare CNTs to be approximately from 2.5 × 106 J/m3 to 3.0 × 107 J/m3 and from 105 J/m3 to 1.5 × 106 J/m3, respectively.
Furthermore, we investigated the fracture acceleration values of three shock absorbers without CNTs and Al2O3, consisting of friction-, fastening-, and compression-based structures. Figure S8 shows the mean values and standard errors in the fracture accelerations of the specimens without CNTs and Al2O3. The interdigitated spring stops consist of friction-based and fastening-type absorbers without CNTs and Al2O3. The mean fracture acceleration values of the interdigitated spring stop and the compression-based stops are 6369 and 6178g, respectively. Meanwhile, in the case of using bare CNTs, the friction-, fastening-, and compression-based shock absorbers have mean fracture values of 6427, 7070, and 6649g, respectively. The mean values of the specimens without CNTs and Al2O3 indicate that the designed shock absorbers without CNTs and Al2O3 have higher survival rates in the mechanical shocks than those of the hard stop and the spring stop. Meanwhile, they have low mean values compared to those with CNTs or Al2O3–CNTs. Therefore, they could be used as newly advanced designs of spring stops, similar to the cascade beam and self-adaptive nonlinear stops17,18, respectively.
Furthermore, we investigated the size of the contact area in the shock absorbers based on friction and compression. However, the size of the contact area did not impact the survival performance. The dominant parameters affecting the survival rate are the structural design of the shock absorber and the usage of Al2O3–CNTs. As shown in Fig. S9, the size of the contact area did not lead to an increase in the average fracture values, but coating Al2O3 on the CNT arrays increased the average fracture values of the specimens in the same design. Furthermore, we compare the characteristics of our shock absorbers with other works, as listed in Table S3. Table S3 exhibits the other structural designs, the introduced materials, and the enhanced survival rate compared with the control device.
Investigation of failed shock absorbers with nanocomposites
We also investigated the structural changes in the nanocomposite after excessive loading acceleration. As shown in the SEM images in Fig. 4a, there is no change in the morphology of the nanocomposites, indicating that the friction-based absorber with the nanocomposite has excellent frictional resilience and repeatability. In contrast, the bare CNT arrays were bent after the acceleration was loaded, and the compliant spring did not recover its original position due to the high adhesion force of the bare CNT arrays, as shown in the SEM images in Fig. 4b. The SEM images in Fig. 4c, d shows the nanocomposite and bare CNT arrays in the fastening-type shock absorber after applying the mechanical shock. Due to the simultaneous loading of excessive shear and compressive forces, the bare CNT arrays were entangled and pressed, while the nanocomposite showed the original state with linear interfaces without structural change.

SEM images of the shock absorbers with a, b friction-based, c, d fastening-type, and e, f compression-based nanocomposites and CNTs after applying excessive acceleration. The scale bar is 10 μm. g Raman spectra of the composite and CNT arrays to investigate the defect changes in the composite and CNT arrays before and after applying the mechanical shock
In the compression-based shock absorber, the difference in mechanical resilience of the composites with and without alumina coating is more evident. The SEM images in Fig. 4e, f shows the morphology change in the nanocomposite and the bare CNT arrays, respectively, when a compressive load was applied. As shown in Fig. 4e, there is no change in the aligned structure of the nanocomposite, indicating that the Al2O3-reinforced CNT nearly recovered to the original state. However, in the device with the bare CNT arrays, the impact force created a gap between the CNT arrays. This indicates that the CNT arrays integrated with the device remained compressed, showing the irreversible character of aligned CNT arrays to compressive stress, which is comparable to that of the previously published literature31. This led to subsequent shock exposure without the participation of CNT arrays in the compression-based specimen. Meanwhile, in the case of the fastening devices with bare CNTs, the interdigitated structures were locked by the deformed CNT structures, as shown in Fig. 4d. Thus, the CNTs were involved in the contact as a cushioning layer, leading to a large mean value compared with that of compression-based devices.
We also measured the Raman spectra of the composite and CNT arrays to investigate the defect changes in the composite and CNT arrays after applying mechanical shock. Figure 4g shows the Raman spectra of the composite and CNT arrays before and after the drop test at an acceleration of 12,000g. The plotted spectra were normalized to the intensity of the D peak. Generally, the IG/ID ratio and the I2D/IG ratios indicate the degree of defects in carbon bonds and the quality of the sp2-hybridized carbon arrangement that appears only in CNT- and graphene-based materials, respectively36. These ratios decreased after applying the mechanical shock, indicating that the defect and quality of the sp2 carbon arrangement decreased simultaneously37. Meanwhile, there was no noticeable change in the nanocomposite, indicating the mechanical stability of the composite.
Conclusion
We fabricated a geometrically aligned region-selectively integrated nanocomposite as an in-plane shock absorber for MEMS devices. The aligned CNT arrays exhibit a high aspect ratio, and the reinforcing alumina exhibits low surface energy to provide deformability and mechanical resilience, respectively, as a composite material. These unique nanocomposite characteristics enable a reduction in the acceleration and dissipation of mechanical energy induced by mechanical shock, greatly enhancing the shock reliability of microstructures. As a result, the nanocomposite-based shock absorber exhibited a high survival rate over a wide acceleration range compared with a hard stop, a spring stop, and a CNT-based shock absorber. Additionally, our newly introduced region-selective integration method of nanocomposite fabrication uses a batch process, which is amenable to mass production. With these enhanced shock reliability and mass-producible manufacturing methods, the proposed nanocomposite-based shock absorber can provide new opportunities to develop highly reliable MEMS devices for use in harsh environments and industries with exposure to large shocks.
Experimental section
Fabrication of Si microstructures
A Si device layer and a handle layer, whose thicknesses are 50 and 500 µm, respectively, were patterned on a 4-in. silicon-on-insulator wafer by using deep reactive ion etching with photoresist masks. The patterned wafer was then divided into 9 mm × 9 mm scale chips. The buried oxide layer with a thickness of 2 µm was etched using a hydrofluoric acid solution (50% concentration) to release the microstructure.
Synthesis of vertically aligned CNT arrays and alumina deposition
An iron (Fe) catalyst with a thickness of 2.8 nm for CNT growth was deposited by sputtering using a co-fabricated shadow mask. The undesired Fe catalyst on the top surface was removed by reactive ion etching with carbon tetrafluoride (CF4) at 40 sccm, Ar at 300 sccm, trifluoromethane (CHF3) at 10 sccm, and N2 at 25 sccm under a power of 200 W for 90 s. After the CNT arrays were directly synthesized onto the sidewall surfaces via chemical vapor deposition, Al2O3 was uniformly coated on all sides of the CNT using ALD (MEMS—ALD, CN-1). The ALD chamber temperature was maintained at 450 °C with purging N2. Trimethylaluminum and ozone were used as the metalorganic and oxidizing precursors of Al2O3, respectively. Al2O3 with a thickness of 0.8 Å was deposited in each cycle, and the number of cycles was adjusted to achieve the desired thickness.
Characterization of the microstructures and alumina-reinforced CNT array
The morphologies and Raman spectra of the microstructure and the nanocomposite were observed using a field emission scanning electron microscope (IT-500HR, JEOL) and a Raman spectrometer with an argon-ion layer of 532 nm wavelength (LabRam Aramis, Horiba Jovin Yvon). TEM images were obtained using a high-resolution transmission electron microscope (JEM-F200, JEOL). The value and transient response of the acceleration induced by the drop-collision test were monitored using a high-g accelerometer (350D02, PCB Piezotronics) and an oscilloscope (DSO5014A, Agilent). During the shock-survival test, the experiment was conducted in the impact range of 1000–12,000g in increments of approximately 200g, in which the total number of shocks was 50.
References
Qian, Z. et al. Zero-power infrared digitizers based on plasmonically enhanced micromechanical photoswitches. Nat. Nanotechnol. 12, 969–973 (2017).
Zhang, X., Kwon, K., Henriksson, J., Luo, J. & Wu, M. C. A large-scale microelectromechanical-systems-based silicon photonics LiDAR. Nature 603, 253–258 (2022).
Ma, L. Y., Soin, N., Daut, M. H. M. & Hatta, S. F. W. M. Comprehensive study on RF-MEMS switches used for 5G scenario. IEEE Access 7, 107506–107522 (2019).
Cho, B., Lee, K., Jo, E. & Kim, J. Detection of mixed BTEX with suppressed reaction specificity using tin oxide nanoparticles functionalized by multi-metalloporphyrins. IEEE Sens. J. 19, 11791–11796 (2019).
Huang, Y., Vasan, A. S. S., Doraiswami, R., Osterman, M. & Pecht, M. MEMS reliability review. IEEE Trans. Device Mater. Reliab. 12, 482–493 (2012).
Sundaram, S. et al. Vibration and shock reliability of MEMS: modeling and experimental validation. J. Micromech. Microeng. 21, 045022 (2011).
Seah, S. K. W., Lim, C. T., Wong, E. H., Tan, V. B. C. & Shim, V. P. W. in 4th Electronics Packaging Technology Conference, 2002, 120–125 (2002).
Heinz, D. B., Hong, V. A., Yang, Y., Ahn, C. H. & Kenny, T. W. in 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS) 1122–1125 (2017).
David, R. M. et al. Silicon carbide resonant tuning fork for microsensing applications in high-temperature and high G-shock environments. J. Micro/Nanolithogr. MEMS, MOEMS 8, 021116 (2009).
Aden, T. C. et al. Summary of the hypervelocity weapon system field experiment. IEEE Trans. Magn. 33, 636–641 (1997).
Yee, J. K., Yang, H. H. & Judy, J. W. in Technical Digest. MEMS 2002 IEEE International Conference. Fifteenth IEEE International Conference on Micro Electro Mechanical Systems (Cat. No.02CH37266) 308–311 (2002).
Shusen, H. et al. in TRANSDUCERS ‘03. 12th International Conference on Solid-State Sensors, Actuators and Microsystems. Digest of Technical Papers (Cat. No.03TH8664), vol. 1 pp 91–94 (2003).
Tanner, D. M. et al. in 2000 IEEE International Reliability Physics Symposium Proceedings. 38th Annual (Cat. No.00CH37059) 129–138 (2000).
Yoon, S. W., Lee, S., Perkins, N. C. & Najafi, K. Shock-protection improvement using integrated novel shock-protection technologies. J. Microelectromech. Syst. 20, 1016–1031 (2011).
Naumann, M., Mehner, J., Lin, D. & Miller, T. F. in SENSORS, 2010 IEEE 168-173 (2010).
Xu, K., Zhang, W. & Hao, Y. Mechanical latching stops for reliability improvement of MEMS in shock environments. Microsyst. Technol. 24, 3399–3407 (2018).
Xu, K., Jiang, F., Zhang, W. & Hao, Y. Micromachined integrated self-adaptive nonlinear stops for mechanical shock protection of MEMS. J. Micromech. Microeng. 28, 064006 (2018).
Tao, Y.-K., Liu, Y.-F. & Dong, J.-X. Flexible stop and double-cascaded stop to improve shock reliability of MEMS accelerometer. Microelectron. Reliab. 54, 1328–1337 (2014).
Yoon, S. W., Yazdi, N., Perkins, N. C. & Najafi, K. Micromachined integrated shock protection for MEMS. Sens. Actuators A 130-131, 166–175 (2006).
Delahunty, A. K. & Pike, W. T. Metal-armouring for shock protection of MEMS. Sens. Actuators A 215, 36–43 (2014).
Yoon, S.-H., Roh, J.-E. & Kim, K. L. Woodpecker-inspired shock isolation by microgranular bed. J. Phys. D 42, 035501 (2009).
Bauer, J., Schroer, A., Schwaiger, R. & Kraft, O. Approaching theoretical strength in glassy carbon nanolattices. Nat. Mater. 15, 438–443 (2016).
Portela, C. M. et al. Supersonic impact resilience of nanoarchitected carbon. Nat. Mater. 20, 1491–1497 (2021).
Ye, J. et al. Ultra-low-density digitally architected carbon with a strutted tube-in-tube structure. Nat. Mater. 20, 1498–1505 (2021).
Lee, J. I. et al. Deformable carbon nanotube-contact pads for inertial microswitch to extend contact time. IEEE Trans. Ind. Electron. 59, 4914–4920 (2012).
Lee, J. I., Kwon, D. & Kim, J. in 2015 Transducers - 2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS) 287–290 (2015).
Lee, H., Jo, E., Lee, J. I. & Kim, J. in 2023 IEEE 36th International Conference on Micro Electro Mechanical Systems (MEMS) 45–48 (2019).
Park, S. J. et al. Strong, ultralight nanofoams with extreme recovery and dissipation by manipulation of internal adhesive contacts. ACS Nano 14, 8383–8391 (2020).
Lee, J.-I., Eun, Y., Choi, J., Kwon, D.-S. & Kim, J. Using confined self-adjusting carbon nanotube arrays as high-sensitivity displacement sensing element. ACS Appl. Mater. Interfaces 6, 10181–10187 (2014).
Muñoz-Muñoz, F. et al. The control of thickness on aluminum oxide nanotubes by atomic layer deposition using carbon nanotubes as removable templates. Powder Technol. 286, 602–609 (2015).
Cao, A., Dickrell, P. L., Sawyer, W. G., Ghasemi-Nejhad, M. N. & Ajayan, P. M. Super-compressible foamlike carbon nanotube films. Science 310, 1307–1310 (2005).
Kim, S. et al. Soft nanocomposite electroadhesives for digital micro- and nanotransfer printing. Sci. Adv. 5, https://doi.org/10.1126/sciadv.aax4790.
Kim, S. H., Mulholland, G. W. & Zachariah, M. R. Density measurement of size selected multiwalled carbon nanotubes by mobility-mass characterization. Carbon 47, 1297–1302 (2009).
Qu, L., Dai, L., Stone, M., Xia, Z. & Wang, Z. L. Carbon nanotube arrays with strong shear binding-on and easy normal lifting-off. Science 322, 238–242 (2008).
Bedewy, M., Meshot, E. R., Reinker, M. J. & Hart, A. J. Population growth dynamics of carbon nanotubes. ACS Nano 5, 8974–8989 (2011).
Pyo, S., Kim, W., Jung, H.-I., Choi, J. & Kim, J. Heterogeneous integration of carbon-nanotube–graphene for high-performance, flexible, and transparent photodetectors. Small 13, 1700918 (2017).
Choi, J., Pyo, S., Baek, D.-H., Lee, J.-I. & Kim, J. Thickness-, alignment- and defect-tunable growth of carbon nanotube arrays using designed mechanical loads. Carbon 66, 126–133 (2014).
Acknowledgements
This work was supported by the National Research Foundation of Korea(NRF) grant funded by the Korean government (MSIT) (No. 2021R1A2B5B03002850).
Author information
Authors and Affiliations
Contributions
E.J. and H.L. designed, built, and tested the microstructure and the nanotubes. J.-I.L. contributed to the development of the initial concept of shock absorbers. Prof J.K. guided the design, fabrication, and experiments, revised the paper, and checked the paper prior to its final submission. All authors contributed to the article and approved the submitted version.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jo, E., Lee, H., Lee, JI. et al. Mechanically resilient, alumina-reinforced carbon nanotube arrays for in-plane shock absorption in micromechanical devices. Microsyst Nanoeng 9, 76 (2023). https://doi.org/10.1038/s41378-023-00539-7
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41378-023-00539-7
