
Abstract
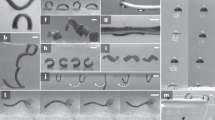
Untethered small-scale (from several millimetres down to a few micrometres in all dimensions) robots that can non-invasively access confined, enclosed spaces may enable applications in microfactories such as the construction of tissue scaffolds by robotic assembly1, in bioengineering such as single-cell manipulation and biosensing2, and in healthcare3,4,5,6 such as targeted drug delivery4 and minimally invasive surgery3,5. Existing small-scale robots, however, have very limited mobility because they are unable to negotiate obstacles and changes in texture or material in unstructured environments7,8,9,10,11,12,13. Of these small-scale robots, soft robots have greater potential to realize high mobility via multimodal locomotion, because such machines have higher degrees of freedom than their rigid counterparts14,15,16. Here we demonstrate magneto-elastic soft millimetre-scale robots that can swim inside and on the surface of liquids, climb liquid menisci, roll and walk on solid surfaces, jump over obstacles, and crawl within narrow tunnels. These robots can transit reversibly between different liquid and solid terrains, as well as switch between locomotive modes. They can additionally execute pick-and-place and cargo-release tasks. We also present theoretical models to explain how the robots move. Like the large-scale robots that can be used to study locomotion17, these soft small-scale robots could be used to study soft-bodied locomotion produced by small organisms.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$29.99 / 30 days
cancel any time
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout




Similar content being viewed by others

References
Chung, S. E., Dong, X. G. & Sitti, M. Three-dimensional heterogeneous assembly of coded microgels using an untethered mobile microgripper. Lab Chip 15, 1667–1676 (2015)
Ceylan, H., Giltinan, J., Kozielski, K. & Sitti, M. Mobile microrobots for bioengineering applications. Lab. Chip 17, 1705–1724 (2017)
Nelson, B. J., Kaliakatsos, I. K. & Abbott, J. J. Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng. 12, 55–85 (2010)
Sitti, M. et al. Biomedical applications of untethered mobile milli/microrobots. Proc. IEEE 103, 205–224 (2015)
Sitti, M. Miniature devices: voyage of the microrobots. Nature 458, 1121–1122 (2009)
Sitti, M. Mobile Microrobotics (MIT Press, 2017)
Diller, E., Zhuang, J., Lum, G. Z., Edwards, M. R. & Sitti, M. Continuously distributed magnetization profile for millimeter-scale elastomeric undulatory swimming. Appl. Phys. Lett. 104, 174101 (2014)
Huang, H. W., Sakar, M. S., Petruska, A. J., Pané, S. & Nelson, B. J. Soft micromachines with programmable motility and morphology. Nat. Commun. 7, 12263 (2016)
Maeda, S., Hara, Y., Sakai, T., Yoshida, R. & Hashimoto, S. Self-walking gel. Adv. Mater. 19, 3480–3484 (2007)
Miyashita, S ., Guitron, S ., Ludersdorfer, M ., Sung, C. R. & Rus, D. An untethered miniature origami robot that self-folds, walks, swims, and degrades. IEEE Int. Conf. on ‘Robotics and Automation’ 1490–1496, http://ieeexplore.ieee.org/document/7139386/ (Institute of Electrical and Electronics Engineers (IEEE), 2015)
Koh, J. S. et al. Jumping on water: surface tension-dominated jumping of water striders and robotic insects. Science 349, 517–521 (2015)
Yuk, H., Kim, D., Lee, H., Jo, S. & Shin, J. H. Shape memory alloy-based small crawling robots inspired by C. elegans. Bioinspir. Biomim. 6, 046002 (2011)
Diller, E. & Sitti, M. Three-dimensional programmable assembly by untethered magnetic robotic micro-grippers. Adv. Funct. Mater. 24, 4397–4404 (2014)
Rus, D. & Tolley, M. T. Design, fabrication and control of soft robots. Nature 521, 467–475 (2015)
Wehner, M. et al. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 536, 451–455 (2016)
Lum, G. Z. et al. Shape-programmable magnetic soft matter. Proc. Natl Acad. Sci. USA 113, E6007–E6015 (2016)
Aguilar, J. et al. A review on locomotion robophysics: the study of movement at the intersection of robotics, soft matter and dynamical systems. Rep. Prog. Phys. 79, 110001 (2016)
Diller, E., Giltinan, J., Lum, G. Z., Ye, Z. & Sitti, M. Six-degree-of-freedom magnetic actuation for wireless microrobotics. Int. J. Robot. Res. 35, 114–128 (2016)
Kummer, M. P. et al. OctoMag: an electromagnetic system for 5-DOF wireless micromanipulation. IEEE Trans. Robot. 26, 1006–1017 (2010)
Hines, L., Petersen, K., Lum, G. Z. & Sitti, M. Soft actuators for small-scale robotics. Adv. Mater. 29, 1603483 (2017)
Amjadi, M., Yoon, Y. J. & Park, I. Ultra-stretchable and skin-mountable strain sensors using carbon nanotubes-Ecoflex nanocomposites. Nanotechnology 26, 375501 (2015)
Gemmell, B. J. et al. Passive energy recapture in jellyfish contributes to propulsive advantage over other metazoans. Proc. Natl Acad. Sci. USA 110, 17904–17909 (2013)
Hu, D. L. & Bush, J. W. M. Meniscus-climbing insects. Nature 437, 733–736 (2005)
Brackenbury, J. Caterpillar kinematics. Nature 390, 453 (1997)
Wang, W. et al. Locomotion of inchworm-inspired robot made of smart soft composite (SSC). Bioinspir. Biomim. 9, 046006 (2014)
Taylor, G. Analysis of the swimming of microscopic organisms. Proc. R. Soc. Lond. Ser. A. 209, 447–461 (1951)
Campbell, J. F. & Kaya, H. K. How and why a parasitic nematode jumps. Nature 397, 485–486 (1999)
Zhang, X. D., Mehrtash, M. & Khamesee, M. B. Dual-axial motion control of a magnetic levitation system using Hall-effect sensors. IEEE/ASME Trans. Mechatron. 21, 1129–1139 (2016)
Abbott, J. J. et al. How should microrobots swim? Int. J. Robot. Res. 28, 1434–1447 (2009)
Aguilar, J. & Goldman, D. I. Robophysical study of jumping dynamics on granular media. Nat. Phys. 12, 278–283 (2016)
Acknowledgements
W.H. thanks the Alexander von Humboldt Foundation for financial support. This work is funded by the Max Planck Society. We thank Z. Burghard and A. Diem from the University of Stuttgart for evaluating the Young’s modulus of our robots, K. Suppelt and S. Meyer from Fujifilm Visualsonics for their help with the ultrasound-guided experiments, and the members from Physical Intelligence Department at the Max Planck Institute for Intelligent Systems for their comments.
Author information
Authors and Affiliations
Contributions
M.S., W.H., G.Z.L. and M.M. proposed and designed the research. W.H. performed all experiments. G.Z.L. developed all theoretical and empirical models, except for the meniscus-climbing model, which was developed by M.M. The experimental data were analysed by W.H., G.Z.L. and M.M. All authors wrote the paper and participated in discussions.
Corresponding author
Ethics declarations
Competing interests
Max Planck Innovation filed a provisional patent application on behalf of all authors (PCT/EP2017/084408) based on the methods and results presented here.
Additional information
Reviewer Information Nature thanks K.-J. Cho, R. Kramer-Bottiglio and B. Mazzolai for their contribution to the peer review of this work.
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Supplementary Information
This file contains supplementary data S1-S15, figures S1-S45 and S1-S4. (PDF 8617 kb)
Jellyfish-like swimming
The video sequentially shows jellyfish-like swimming in slow motion (Fig. 2a), visualization of the fluid vortices produced by the jellyfish-like swimming locomotion as traced by 45 μm beads (Fig. S37), and arrest of the jellyfish-like swimming locomotion when B flipping is stopped. (MP4 1737 kb)
Meniscus climbing and landing
The video sequentially shows the robot climbing a water meniscus (Fig. 2b) and landing on a solid platform (Fig. 2c). (MP4 1162 kb)
Rolling and walking
The video sequentially presents rolling (Fig. 2e) and straight walking (Fig. 2f), demonstrates steered walking, and a comparison of using rolling or walking to cross a gap. (MP4 1404 kb)
Crawling
The video presents the relationship between the traveling wave produced on the soft robot body and the crawling direction (Fig. 2g), and demonstrates that the robot’s crawling direction can be flipped by reversing the direction of the traveling wave. (MP4 1100 kb)
Jumping
The video first presents the directional jumping locomotion shown in Fig. 2h. Subsequently, it presents the straight jumping locomotion, which is induced solely via the shapechange mechanism. It further shows how the straight jumping locomotion can be affected by different vertical magnetic field spatial gradients. Finally, it presents a control experiment in which a robot that has a homogenous magnetization profile is unable to jump, as opposed to a robot with a harmonic magnetization profile. (MP4 2128 kb)
Multimodal locomotion
The video presents the sequence of Fig. 3, whereby the soft robot navigates through different terrains by combining all the discussed locomotion modes. (MP4 3990 kb)
Multimodal locomotion in a surgical phantom
The video presents the soft robot navigating through a stomach phantom by a combination of meniscus climbing, landing, rolling and jumping, also shown in Fig. 4a. In the video, the robot moves very quickly at around 00:34 because it is pulled by unwanted magnetic gradient-based pulling forces generated by the spatial gradients of B. (MP4 1147 kb)
Ultrasound-guided locomotion
The video shows ex-vivo ultrasound-guided locomotion of the soft robot (Fig. 4b and Fig. S44). Jellyfish-like swimming, rolling and crawling are respectively demonstrated in three different biological phantoms. (MP4 2039 kb)
Cargo transport
The video demonstrates gripping, transportation and release of a cargo by the soft robot (Fig. 4c). (MP4 908 kb)
Cargo delivery
The video demonstrates selectively triggered cargo release by a modified soft robot (Fig. 4d and Fig. S45). (MP4 962 kb)
Rights and permissions
About this article

Cite this article
Hu, W., Lum, G., Mastrangeli, M. et al. Small-scale soft-bodied robot with multimodal locomotion. Nature 554, 81–85 (2018). https://doi.org/10.1038/nature25443
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/nature25443
This article is cited by
-
Stenus-inspired, swift, and agile untethered insect-scale soft propulsors
Nature Communications (2024)
-
A magnetically powered nanomachine with a DNA clutch
Nature Nanotechnology (2024)
-
Self-regulated underwater phototaxis of a photoresponsive hydrogel-based phototactic vehicle
Nature Nanotechnology (2024)
-
Light-controlled soft bio-microrobot
Light: Science & Applications (2024)
-
Design and build of small-scale magnetic soft-bodied robots with multimodal locomotion
Nature Protocols (2024)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
