
Abstract
When flying or swimming, animals must adjust their own movement to compensate for displacements induced by the flow of the surrounding air or water1. These flow-induced displacements can most easily be detected as visual whole-field motion with respect to the animal’s frame of reference2. Despite this, many aquatic animals consistently orient and swim against oncoming flows (a behaviour known as rheotaxis) even in the absence of visual cues3,4. How animals achieve this task, and its underlying sensory basis, is still unknown. Here we show that, in the absence of visual information, larval zebrafish (Danio rerio) perform rheotaxis by using flow velocity gradients as navigational cues. We present behavioural data that support a novel algorithm based on such local velocity gradients that fish use to avoid getting dragged by flowing water. Specifically, we show that fish use their mechanosensory lateral line to first sense the curl (or vorticity) of the local velocity vector field to detect the presence of flow and, second, to measure its temporal change after swim bouts to deduce flow direction. These results reveal an elegant navigational strategy based on the sensing of flow velocity gradients and provide a comprehensive behavioural algorithm, also applicable for robotic design, that generalizes to a wide range of animal behaviours in moving fluids.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$29.99 / 30 days
cancel any time
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout




Similar content being viewed by others

References
Chapman, J. W. et al. Animal orientation strategies for movement in flows. Curr. Biol. 21, R861–R870 (2011)
Lyon, E. P. On rheotropism I. Rheotropism in fishes. Am. J. Physiol. 12, 149–161 (1904)
Dijkgraaf, S. The functioning and significance of the lateral-line organs. Biol. Rev. Camb. Phil. Soc. 38, 51–105 (1963)
Montgomery, J., Baker, C. F. & Carton, A. G. The lateral line can mediate rheotaxis in fish. Nature 389, 960–963 (1997)
Olszewski, J., Haehnel, M., Taguchi, M. & Liao, J. C. Zebrafish larvae exhibit rheotaxis and can escape a continuous suction source using their lateral line. PLoS ONE 7, e36661 (2012)
Suli, A., Watson, G. M., Rubel, E. W. & Raible, D. W. Rheotaxis in larval zebrafish is mediated by lateral line mechanosensory hair cells. PLoS ONE 7, e29727 (2012)
Olive, R. et al. Rheotaxis of larval zebrafish: behavioral study of a multi-sensory process. Front. Syst. Neurosci. 10, 14 (2016)
Galilei, G. Dialogo sopra i due massimi sistemi del mondo ( transl. Drake, S. ) (Univ. California Press, 1967)
Van Trump, W. J. & McHenry, M. J. The lateral line system is not necessary for rheotaxis in the Mexican blind cavefish (Astyanax fasciatus). Integr. Comp. Biol. 53, 799–809 (2013)
Arnold, G. P. Rheotropism in fishes. Biol. Rev. Camb. Phil. Soc. 49, 515–576 (1974)
Beck, J. C., Gilland, E., Tank, D. W. & Baker, R. Quantifying the ontogeny of optokinetic and vestibuloocular behaviors in zebrafish, medaka, and goldfish. J. Neurophysiol. 92, 3546–3561 (2004)
Münz, H. in The Mechanosensory Lateral Line: Neurobiology and Evolution (eds Coombs, S., Gorner, P. & Münz, H. ) 285–298 (Springer, 1989)
Budick, S. A. & O’Malley, D. M. Locomotor repertoire of the larval zebrafish: swimming, turning and prey capture. J. Exp. Biol. 203, 2565–2579 (2000)
Yuan, J., Raizen, D. M. & Bau, H. H. Propensity of undulatory swimmers, such as worms, to go against the flow. Proc. Natl Acad. Sci. USA 112, 3606–3611 (2015)
Berg, H. Random Walks in Biology (Princeton Univ. Press, 1993)
von Kármán, T. Mechanische Ähnlichkeit und Turbulenz. Nachr. Ges. Wiss. Gottingen Math.-Phys. Kl. 5, 58–76 (1930)
Carlson, R. L. & Lauder, G. V. Escaping the flow: boundary layer use by the darter Etheostoma tetrazonum (Percidae) during benthic station holding. J. Exp. Biol. 214, 1181–1193 (2011)
Tritton, D. J. Physical Fluid Dynamics 2nd edn, 18–25, 277 (Clarendon, 1988)
Barkley, D. et al. The rise of fully turbulent flow. Nature 526, 550–553 (2015)
Hofer, B. Studien über die Hautsinnesorgane der Fische. I. Die Funktion der Seitenorgane bei den Fischen. Ber. Kgl. Bayer. Biol. Versuchsstation München 1, 115–164 (1908)
Ghysen, A. & Dambly-Chaudière, C. Development of the zebrafish lateral line. Curr. Opin. Neurobiol. 14, 67–73 (2004)
López-Schier, H., Starr, C. J., Kappler, J. A., Kollmar, R. & Hudspeth, A. J. Directional cell migration establishes the axes of planar polarity in the posterior lateral-line organ of the zebrafish. Dev. Cell 7, 401–412 (2004)
Nagiel, A., Andor-Ardó, D. & Hudspeth, A. J. Specificity of afferent synapses onto plane-polarized hair cells in the posterior lateral line of the zebrafish. J. Neurosci. 28, 8442–8453 (2008)
Ristroph, L., Liao, J. C. & Zhang, J. Lateral line layout correlates with the differential hydrodynamic pressure on swimming fish. Phys. Rev. Lett. 114, 018102 (2015)
Hildebrand, D. G. C. et al. Whole-brain serial-section electron microscopy in larval zebrafish. Nature 545, 345–349 (2017)
Drucker, E. G. & Lauder, G. V. Locomotor forces on a swimming fish: three-dimensional vortex wake dynamics quantified using digital particle image velocimetry. J. Exp. Biol. 202, 2393–2412 (1999)
Schuster, K. & Ghysen, A. Labeling second-order sensory neurons in the posterior lateral-line system of zebrafish. Cold Spring Harb. Protoc. 2013, 1175–1177 (2013)
Pujol-Martí, J. et al. Neuronal birth order identifies a dimorphic sensorineural map. J. Neurosci. 32, 2976–2987 (2012)
Acknowledgements
We are grateful to E. Soucy and J. Greenwood for technical support, and B. Jordan for discussions. We thank M. Baldwin, M. Häsemeyer, and T. Dunn for reading the manuscript, and M. McHenry for advice on the behavioural rig. We also thank M. Grünthal and R. Hellmiss for contributions to figure design, and V. Stih for sharing unpublished data. This work was supported by a Pew Latin-American Fellowship to P.O., BRAIN National Institutes of Health (NIH) grant U01NS090449, NIH Pioneer award, and DP1 NS082121 to F.E., Simons Foundations grant SCGB 325207 and Human Frontier Science Program grant RGP0033/2014 to F.E., and an Office of Naval Research grant N00014-09-1-0352 to G.L., monitored by T. McKenna. R.P. was funded by the Max-Planck-Gesellschaft during part of this work.
Author information
Authors and Affiliations
Contributions
P.O. conceived the project, built the rig, performed the experiments, and analysed the data. P.O, I.O., and F.E. designed the experiments. I.O. performed the chemical and two-photon lateral line ablations. P.O. and R.P. designed the software for the behavioural rig. P.O. and G.L. performed the PIV experiments. R.P., F.E., and I.O. contributed to the mathematical and theoretical considerations. I.O. and F.E. wrote the model. P.O., I.O., and F.E. wrote the manuscript with the assistance of R.P. and G.L. All authors discussed the data and the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Additional information
Reviewer Information Nature thanks E. Brainerd, J. Dabiri and the other anonymous reviewer(s) for their contribution to the peer review of this work.
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Extended data figures and tables
Extended Data Figure 1 Touch and acceleration do not explain rheotaxis in larval zebrafish.
a, Percentage of time fish spend at the wall. n = 13 fish, 341 trials. b, Mean radial distance change for bouts occurring in close proximity to the wall (<0.36 cm, one-third of the tube radius). n = 13 fish, 1,364 bouts. c–f, Rheotactic metrics for larval zebrafish exposed to a series of acceleration/water displacement/de-acceleration stimuli. c, Polar plot of fish orientation in the axis of the stimulation. Blue arrow represents stimulus direction. d, Cosine of the mean orientation for fish presented with different acceleration regimes. Black bar represents cosine of the mean orientation for fish exposed to water flow in the dark (Fig. 1g). e, Fish position (from the observer’s point of view) in the axis of the stimulus. Dark blue represents acceleration/de-acceleration periods; light blue represents water displacement. f, Gain for fish presented with different acceleration regimes. Black bar represents gain for fish exposed to water flow in the dark (Fig. 1i). n = 6 fish subjected to 6 trials at each acceleration regime (180 trials total). All data are shown as means ± s.e.m. **P < 0.01; Monte Carlo permutation test.
Extended Data Figure 2 Gradient-dependent rotation of the larval zebrafish body.
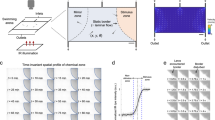
a, Development of flow velocity profiles obtained through PIV at different points in the horizontal axis of the tube (see Methods). b, Orientation (black) and angular rotation (brown) changes in a single paralysed larval zebrafish in water flow. Data correspond to the example shown in Supplementary Video 2. c, Mean angular rotational velocities for different velocity gradient magnitudes. n = 3 fish, 18 trials. d, Inter-bout body rotation (yellow) and turn magnitude histogram for bouts going against (light green) and following (dark green) flow rotational fields. Histograms and fitted lines for each distribution are shown. n = 13 fish, 341 trials. e, Mean delta angle for inter-bout body rotation and turns following/going against flow field rotation. n = 3,840 inter-bout periods, 2,831 bouts. Means and ± s.e.m. (c, e) and bars and fitted lines (d) are shown. **P < 0.01; Monte Carlo permutation test.
Extended Data Figure 3 The rheotactic algorithm allows the fish to orient and swim against incoming water flows.
a, Graphical representation of bout types during rheotaxis. b, c, e, f, Polar plots of fish orientation before (light colour) and after (dark colour) high magnitude (>45°) turns that start when fish is facing away from the flow. n = 98 bouts. d, g, Scatter plots of turn magnitude versus gain for bouts occurring after increases (d) or decreases (g) in gradient magnitude. n = 2,598 bouts. h, Cosine of the mean orientation for the data shown in b, c, e and f. i, Gain for high magnitude turns extracted from the data shown in d and g. n = 508 bouts. Data are shown as means ± s.e.m. *P > 0.01 and < 0.05; **P < 0.01, Monte Carlo permutation test.
Extended Data Figure 4 The rheotactic algorithm depends on delta velocity gradients, is mainly composed of lateral turns, and is independent of flow direction.
a, Mean turn magnitude for bouts occurring after increases or decreases in gradient magnitude, grouped by delta gradient. Data are the same as in Fig. 3e. b, Scatter plot of absolute velocity gradient versus turn magnitude for bouts occurring at intermediate tube regions (0.36–0.74 cm away from the walls) that could be reached from both low and high gradient areas. n = 13 fish, 1691 bouts. c, Mean turn magnitude for bouts after increases or decreases in gradient magnitude, grouped by absolute velocity gradient. Data are the same as in b. d, e, Turn magnitude histogram for left/right (d) and up/down (e) turns. n = 13 fish, 341 trials. f, Mean difference between the medians of increasing and decreasing gradient turn distributions. Data are the same as in d and e. g–i, Turn magnitude histogram for experiments in which water flowed towards (g) or away from (h) the water reservoir. n = 13 fish; 170 and 171 trials for flow towards and flow away from experiments, respectively. i, Cosine of the mean orientation for flow towards and flow away from experiments. Data are the same as in g and h. Means and ± s.e.m. (a, c, f, i) and bars and fitted lines (d, e, g, h) are shown. NS, P > 0.05; **P < 0.01; Kolmogorov–Smirnov (d, e, g, h) and Monte Carlo permutation (a, c, f, i) tests.
Extended Data Figure 5 Model fish perform rheotaxis in a virtual turbulent flow.
a, Virtual laminar flow profile used for modelling rheotactic behaviour (Fig. 3f, g). b, Flow profile in a after the addition of Kármán vortex streets to a at 50% intensity and 100% density. c, Flow profile in a after the addition of static vortices set to 100% intensity and 100% density. d, Trajectories of 100 (grey) modelled fish facing a virtual turbulent flow towards the left. Five examples are coloured for clarity. e, Polar plot of model fish orientation under different turbulence strengths. f, Gain of model fish as a function of increasing vortex density at a constant 100% vortex intensity. g, Gain of model fish as a function of increasing vortex intensity at a constant 100% vortex density. Inset is an expanded view of the initial gain drop.
Extended Data Figure 6 Larval zebrafish swims towards the centre of the tube during rheotaxis.
a, Horizontal (left/right) positions of a single fish during rheotaxis. Light blue indicates water flow stimulus; dark blue dots indicate direction change events. Data correspond to the example shown in Fig. 1b–e. b, Radial distance and turn magnitude at consecutive swim direction changes. n = 774 direction change events. c, Radial distance over time. n = 13 fish, 341 trials. d, Radial distance over time for a modelled particle following the rheotactic algorithm at different vortex densities. Data are shown as means ± s.e.m. **P < 0.01; Monte Carlo permutation test.
Extended Data Figure 7 Bilateral lateral line stimulation is required for rheotaxis in larval zebrafish.
a–d′, Representative examples of copper-mediated chemical neuromast (a, a′) and two-photon laser sham (b, b′), anterior (c, c′), and posterior (d, d′) lateral line nerve ablations before (left column) and after (right column) treatment. DiasP-stained (a, a′) and GFP-expressing Tg(HGn93D) fish shown. Red dotted circles indicate the region in which laser power was focused. e, Cosine of the mean orientation for fish subjected to unilateral laser ablations of the lateral line nerve. Mean and s.e.m. of the population (black) and means of individual fish (grey) before and after treatment are shown; n: sham, 9 fish; anterior lateral line ablation, 4 fish; posterior lateral line ablation, 9 fish. All fish were subjected to six trials before and after manipulations. NS, P > 0.05; *P < 0.05 and > 0.01; Monte Carlo permutation test.
Supplementary information
Supplementary Information
This file contains mathematical considerations points 1-7. (PDF 527 kb)
Rheotaxis in larval zebrafish
Time-lapse of a 6-day old zebrafish larvae performing rheotaxis in the absence of visual cues. Side (upper image) and top (lower image) views are shown. Light blue arrow indicates leftward flow stimulation. Video was acquired at 200fps and played back at 400fps. (AVI 12742 kb)
Effect of flow velocity gradients on the larval zebrafish body
Time-lapse of a paralyzed 6-day old zebrafish larvae immersed in water flow. Side (upper image) and top (lower image) views are shown. Light blue arrow indicates leftward flow displacement. Video was acquired at 200fps and played back at 400fps. (AVI 6591 kb)
A demonstration of the labview simulation software (rheotaxis interactive.llb)
The video shows a particle (model fish) that moves randomly in a virtual flow field which is matched to our experimental conditions. Specifically, turn angles are drawn from the distributions shown in the upper left corner – red for random walking, white for rheotaxis. Turbulence is introduced in the second half of the movie by superimposing rotational flow-fields in sub-areas as indicated. It becomes clear that under all of these conditions the rheotactic algorithm elicited rheotaxis in different gradient regimes with remarkable robustness. Voice over by Florian Engert. (WMV 5418 kb)
The lateral line system is required for rheotaxis in larval zebrafish
Timelapse of a neuromast-ablated 7-day old zebrafish larvae presented with water flow in the absence of visual cues. Side (upper image) and Top (lower image) views are shown. Light blue arrow indicates leftward flow stimulation. Video was acquired at 200fps and played back at 400fps. (AVI 13571 kb)
Rights and permissions
About this article

Cite this article
Oteiza, P., Odstrcil, I., Lauder, G. et al. A novel mechanism for mechanosensory-based rheotaxis in larval zebrafish. Nature 547, 445–448 (2017). https://doi.org/10.1038/nature23014
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/nature23014
This article is cited by
-
Self-regulated underwater phototaxis of a photoresponsive hydrogel-based phototactic vehicle
Nature Nanotechnology (2024)
-
An optofluidic platform for interrogating chemosensory behavior and brainwide neural representation in larval zebrafish
Nature Communications (2023)
-
Lateral line ablation by ototoxic compounds results in distinct rheotaxis profiles in larval zebrafish
Communications Biology (2023)
-
Neurocircuitry of Predatory Hunting
Neuroscience Bulletin (2023)
-
Neural circuit control of innate behaviors
Science China Life Sciences (2022)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
