- NEWS AND VIEWS
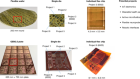
Complex mechanical motion guided without external control
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$29.99 / 30 days
cancel any time
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Rent or buy this article
Prices vary by article type
from$1.95
to$39.95
Prices may be subject to local taxes which are calculated during checkout
Nature 561, 470-471 (2018)
doi: https://doi.org/10.1038/d41586-018-06787-2
References
Coulais, C., Sabbadini, A., Vink, F. & van Hecke, M. Nature 561, 512–515 (2018).
Overvelde, J. T. B., Weaver, J. C., Hoberman, C. & Bertoldi, K. Nature 541, 347–352 (2017).
Reis, P. M., Jaeger, H. M. & van Hecke, M. Extreme Mech. Lett. 5, 25–29 (2015).
Haghpanah, B., Salari-Sharif, L., Pourrajab, P., Hopkins, J. & Valdevit, L. Adv. Mater. 28, 7915–7920 (2016).
Howell, L. L., Magleby, S. P. & Olsen, B. M. Handbook of Compliant Mechanisms (Wiley, 2013).
Hopkins, J. Shaw, L., Dotson, M., Chizari, S. & Song, Y. Bull. Am. Phys. Soc. abstr. F17.00004 (2018).
Mankame, N. D. & Ananthasuresh, G. K. Comput. Struct. 82, 1267–1290 (2004).
Silverberg, J. L. et al. Nature Mater. 14, 389–393 (2015).
Waitukaitis, S., Menaut, R., Chen, B. G. & van Hecke, M. Phys. Rev. Lett. 114, 055503 (2015).
 Read the paper: Multi-step self-guided pathways for shape-changing metamaterials
Read the paper: Multi-step self-guided pathways for shape-changing metamaterials
 Generation soft
Generation soft
 Algorithm for architectural origami
Algorithm for architectural origami