
Abstract
Fusion energy research has in the past 40 years focused primarily on the tokamak concept, but recent advances in plasma theory and computational power have led to renewed interest in stellarators. The largest and most sophisticated stellarator in the world, Wendelstein 7-X (W7-X), has just started operation, with the aim to show that the earlier weaknesses of this concept have been addressed successfully, and that the intrinsic advantages of the concept persist, also at plasma parameters approaching those of a future fusion power plant. Here we show the first physics results, obtained before plasma operation: that the carefully tailored topology of nested magnetic surfaces needed for good confinement is realized, and that the measured deviations are smaller than one part in 100,000. This is a significant step forward in stellarator research, since it shows that the complicated and delicate magnetic topology can be created and verified with the required accuracy.
Similar content being viewed by others

Introduction
Fusion has the potential to cover the energy needs of the world’s population into the distant future. Lawson showed in 1957 that magnetic confinement fusion based on deuterium–tritium fusion can work as a net energy source if one achieves a sufficiently high triple product,  keV m−3 s for the plasma, approximately valid for ion temperatures Ti in the range 10–40 keV (ref. 1).
keV m−3 s for the plasma, approximately valid for ion temperatures Ti in the range 10–40 keV (ref. 1).
Here ni is the ion density, and  is the energy confinement time, which for a typical operating point in magnetic fusion reactor studies is a few seconds.
is the energy confinement time, which for a typical operating point in magnetic fusion reactor studies is a few seconds.
A promising approach to meeting this challenge is the use of a magnetic field that creates toroidal magnetic surfaces.
Of these concepts, the tokamak has so far shown the best confinement properties, but the stellarator is not far behind, and there is reason to believe that it can catch up. In a stellarator, nested toroidal magnetic surfaces are created from external magnetic coils, see Fig. 1. Each magnetic field line meanders around on its magnetic surface; it never leaves it. In general, if one follows a field line from one point on a magnetic surface, one never comes back to the same exact location. Instead, one covers the surface, coming infinitely close to any point of the surface.

Some representative nested magnetic surfaces are shown in different colours in this computer-aided design (CAD) rendering, together with a magnetic field line that lies on the green surface. The coil sets that create the magnetic surfaces are also shown, planar coils in brown, non-planar coils in grey. Some coils are left out of the rendering, allowing for a view of the nested surfaces (left) and a Poincaré section of the shown surfaces (right). Four out of the five external trim coils are shown in yellow. The fifth coil, which is not shown, would appear at the front of the rendering.
The stellarator is different from the other toroidal magnetic surface concepts in that both the toroidal and the poloidal field components—which together create the magnetic surface topology—are created from currents in external coils. In the tokamak and the reversed-field pinch2, a strong toroidal current driven within the plasma is needed to generate the poloidal magnetic-field component. The stellarator’s lack of a strong current parallel to the magnetic field greatly reduces macroscopic plasma instabilities, and it eliminates the need for steady-state current drive. This makes it a more stable configuration, capable of steady-state operation. These are important advantages for a power plant.
The stellarator was invented by Lyman Spitzer in the 1950s (ref. 3). So why did it fall behind? And why do some believe that it is about to have a comeback?
Plasma confinement in early stellarators was disappointing. This was due to poorly confined particle orbits—many of the particle trajectories were not fully confined, even though the magnetic field lines were. If each guiding centre (the point around which the particle performs its rapid gyration) were to stay exactly on the magnetic field line it starts out on, the magnetic surfaces would guarantee good confinement. But for all toroidal magnetic systems, the orbits deviate from the field lines, since the guiding centres drift perpendicular to the magnetic field. This is due to the field-line curvature and magnetic field strength inhomogeneities inherent to the toroidal magnetic topology. In a magnetically confined fusion plasma, the drift is on the order of 10,000 times slower than the particle velocity, but, at 100 ms−1, it will lead to particle losses in less than 1/10 of a second, if the drifts do not average out or stay within the magnetic surface, but instead carry the particle from the inner to the outer magnetic surfaces. This was the case in early stellarator experiments. The tokamak and the reversed-field pinch do not suffer from this problem since their toroidal symmetry makes the particle drifts average out for all the particles and therefore only cause minor excursions from the magnetic surface.
Advances in plasma theory, in particular in the 1980s and 1990s, allowed the development of stellarator magnetic field configurations that display greatly improved confinement (see refs 4, 5), reducing the drift orbit losses to a level sufficiently small so that it is predicted to be compatible with an economically feasible fusion power plant. The optimization itself, as well as the associated design of coils that realize the optimized magnetic fields, requires computer power that only became available in the 1980s. The first generation of optimized stellarators started operation in the 1990s, and confirmed many of the expected improvements6,7. These devices were, however, too small to reach the high ion temperatures where the optimization really comes to its test. Moreover, they were built with copper coils, which are adequate for proof-of-principle studies but incompatible with steady-state operation at high magnetic field strengths. The Wendelstein 7-X (W7-X) stellarator experiment is the first representative of the new generation of optimized stellarators, and aims to show with its superconducting coil system and relatively large size (major radius 5.5 m), quasi-steady state operation with plasma parameters, including ion temperatures, close to those of a future fusion power plant8,9. The sophisticated computer optimization of W7-X came at a price, however: the coils have complicated three-dimensional (3D) shapes, reminiscent of sculptures, Fig. 1. With today’s 3D design and manufacturing techniques, complex 3D engineering has become feasible, albeit still challenging10. Strict requirements for the manufacturing and assembly accuracy of the coils add to the engineering challenge, which was in fact viewed by some as unrealistic. High engineering accuracy is needed because small magnetic field errors can have a large effect on the magnetic surfaces and the confinement of the plasma.
The measurements that are presented in the following sections confirm that the engineering challenges of building and assembling the device, in particular its coils, with the required accuracy, are met successfully. To explain how this was done, we first describe a few key concepts.
Results
Hamiltonians and magnetic surfaces
The equations governing magnetic field lines can be written in Hamiltonian form. It is curious that this simple, but little-known, fact was discovered only half a century ago11, but thanks to it, the entire arsenal of Hamiltonian chaos theory can be applied to magnetic fields. For instance, the celebrated Kolmogorov–Arnold–Moser (KAM) theorem12,13,14 guarantees that small perturbations to an otherwise integrable magnetic field preserve the topology of most field lines, and break it by generating so-called magnetic islands only at well-defined locations. As we shall see, these islands can be measured and visualized directly in W7-X and offer the opportunity to detect field perturbations smaller than δB/B∼10−5. To our knowledge, it is the first time that the topology of a magnetic field has been measured so accurately. For more information on the theory of shaped magnetic fields and their role in plasma confinement, we refer to two recent reviews15,16.
A magnetic surface is not only characterized by its shape and enclosed volume, but also by its rotational transform, ɩ. This is a measure of the poloidal rotation (‘twist’) of the field lines as one follows them around the magnetic surface; ɩ=1/2 indicates that the field line moves halfway around a magnetic surfaces in the poloidal direction for each toroidal turn it makes. Thus, for ɩ=1/2, the field line bites itself in the tail after two toroidal transits. Since there are many more irrational than rational numbers, ɩ is typically irrational, and a magnetic field line generally does not close on itself, it densely traces out a two-dimensional surface.
Measuring the magnetic topology
Since the magnetic surface topology in a stellarator is created entirely from external coils, it can be measured in the absence of a plasma. This is done using an electron beam injected along the magnetic field. It follows and therefore maps out the magnetic field lines, and thus allows confirmation of the magnetic surface topology, providing a flux surface map. As mentioned earlier, the motion along the field is much faster than the guiding-centre drifts. This is even more so for the relatively low-energy electrons used in magnetic-surface mapping. Owing to the launch of the electrons parallel to the magnetic field, and the much smaller mass of electrons relative to any ion, its ratio of parallel velocity to guiding centre drift velocity is of order 1 million. Thus, the beam follows the magnetic field lines to a very high accuracy. The source of the electron beam is an electron gun, a small negatively biased and heated thermionic electron emitter surrounded by a small electrically grounded cylindrical structure. This electron beam alone can visualize the magnetic field line on which it is placed, through collisional excitation of a dilute background gas inside the vacuum chamber. This way, striking images can be made of the 3D structure of the magnetic surfaces; see Fig. 2 and refs 17, 18.

The field lines making up a magnetic surface are visualized in a dilute neutral gas, in this case primarily water vapour and nitrogen (pn≈10−6 mbar). The three bright light spots are overexposed point-like light sources used to calibrate the camera viewing geometry.
A two-dimensional cross-sectional image generally provides clearer information though, just as Poincaré phase-space maps do for other Hamiltonian systems. Such a Poincaré plot of the magnetic surface is realized experimentally by intersecting the electron beam with a rod covered with a fluorescent, here a special zinc oxide powder (ZnO:Zn). When the rod intersects the magnetic surface on which the electron beam circulates, it fluoresces at the one or usually two locations where the rod intersects the magnetic surface and therefore collides with the electron beam. As the rod moves through the surface, all points on the latter will eventually light up. In a long camera exposure of this sweep motion, the entire cross-section of the magnetic surface appears, as shown in Fig. 3. The motion of the rod itself is often invisible on such an image, since the light sources (other than the fluorescence) are kept as weak as possible. After an exposure, one can move the electron gun to another field line that defines another magnetic surface, and repeat the process. This way, the nested, closed magnetic surface topology, which is illustrated in Fig. 1, can be experimentally verified19,20,21,22, and if any magnetic island chains exist, they will show up in the Poincaré plot, as explained in the following.

The Poincaré section of a closed magnetic surface is measured using the fluorescent rod technique. The electron beam circulates more than 40 times, that is, over 1 km along the field line.
Island chains and error fields
An island chain can appear on any magnetic surface with a rational value of ɩ: a direct confirmation of the small-denominator problem in KAM theory12. In practice, island chains with a detectable and operation-relevant size only appear for low-order rational values of ɩ, and only if there is a Fourier component of the magnetic field that has matching (that is, resonant) toroidal and poloidal mode numbers, n and m, so that ɩ=n/m.
W7-X is designed to reach ɩ=1 at the outermost flux surface. It is a fivefold periodic device, with a pentagon-like shape, and thus has an n=5 Fourier component to its magnetic field, so that an n=m=5 island chain appears at the plasma edge. We denote unwanted field components error fields, and describe them in relative terms, bmn=Bmn/B0, where B0 is the average magnetic field strength in the confinement region, and Bmn is the amplitude of the Fourier component of the error field. In the search for error fields, we focus on the toroidal n numbers since only n=5 and multiples thereof should be present, whereas a broad spectrum of poloidal m numbers is present in W7-X. The n=1 through 4 components are to be avoided as much as possible, to ensure symmetric heat load distributions onto the 2 × 5=10 divertor units to be installed at the vessel wall in future operation phases23. For the symmetry-breaking n=1 through 4 error fields, deformations due to electromagnetic forces do not play a major role and the bmn’s are largely independent of the magnitude of B0, in contrast to the effects discussed in the ‘Discussion’ section. Of particular concern is the n=1 component, which would create an n/m=1/1 island chain, and would result from, for example, a slightly misplaced coil module.
When minimizing the error fields, the main engineering challenge is the geometrical precision during coil manufacturing and coil assembly. The 3.5 × 2.5 × 1.5 m-size non-planar coil winding packs with their five different geometries (cf. Fig. 1) are particularly critical24. The construction of W7-X required, for the first time, industry to manufacture superconducting coils with a highly complex shapes, with tolerances in the ±1 mm regime. This was accomplished by using specialized winding devices combined with precision metrology25.
It was even more challenging to maintain the precision, and keep track of it, during installation of the coils: Positioning of the coils, machining of the contact elements, welding of mechanical supports and bolting to the massive central support ring, all sums up to create an additional contribution to the error field. It was only possible to keep deviations during installation and assembly into coil groups under control by intensive use of laser-based metrology tools, systematic adjustment procedures, as well as advanced welding and machining technologies. The largest coil placement errors were less than 4.4 mm, resulting in an expected largest Fourier coefficient of the magnetic perturbation error of b11≈1.2 × 10−4 (ref. 26).
Measuring error fields
Magnetic flux surface mapping, in particular of island chains27, allows for detailed error field detection and correction19,28. Island chains are sensitive indicators of small changes in the magnetic field topology, since they are physical manifestations of resonances in the magnetic topology. The radial full width w of an island chain is related to a resonant magnetic field component through ref. 16

The width of an island chain depends on the square root of the resonant field component, Bmn, with ɩ=n/m, and the magnetic shear dt/dr, as well as the poloidal mode number m and the size of the device (via the major radius R0=5.5 m in W7-X). In W7-X, the rotational transfrom ɩ is nearly constant from the inner to the outer magnetic surfaces, then dɩ/dr is small, and a sizeable island chain will result from even a very small resonant error field.
With field-line mapping, island chains can be detected, and thus, ɩ can be determined at a specific radial location, and resonant error fields, if present, can be measured.
We show in the following that effects due to slight deformations of the magnetic coils are clearly visible, and that an important error field component in W7-X has been measured to be less than 1 in 100,000. To our knowledge, this is an unprecedented accuracy, both in terms of the as-built engineering of a fusion device, as well as in the measurement of magnetic topology.
Adjustment of ɩ
The magnetic topology used for initial plasma experiments in W7-X was chosen so as to avoid island chains at the plasma edge29.
The rotational transform ɩ varies from 0.79 in the centre to 0.87 at the outer magnetic surface that just touches the graphite limiters installed to protect in-vessel components by intercepting the plasma heat loads.
The ɩ=5/6≈0.83 resonance is located inside the confinement region—and is thus unproblematic for the plasma-facing components. It creates a prominent island chain, because of the built-in n=5 component in W7-X. This island chain is indeed clearly visible, as seen in Fig. 4 showing a measurement performed at the field strength B=2.5 T later intended for plasma operation. The island chain location was detected almost exactly at the position expected from calculations taking the elastic deformation of the superconducting coils into account. These deformations, due to the electromagnetic forces between the magnets, cause a roughly 1% decrease in ɩ, thus shifting the location of ɩ=5/6 a few centimetres outward from where they would be without coil deformation. This was confirmed by repeating the measurements at =0.4 T and observing that the island chain indeed appears those few centimetres further inward, Fig. 5. At B=0.4 T, the electromagnetic forces are (2.5/0.4)2≈39 times smaller than at B=2.5 T. The actual change in the angle of the magnetic field vector detected in this way is only about 0.1%. Nevertheless, it shows up in Fig. 5 as a clearly visible radial shift of the island chain. A more detailed analysis of these data can be found elsewhere30.

The 5/6 island chain is visible in a poloidal-radial Poincaré plot created by an electron gun and a sweep rod, as a set of six ‘bubbles’, reflecting the m=6 poloidal mode number. A thin background gas in the chamber creates a visualization of the field lines that create the x-points of the island chain.

The 5/6 island chain is shown in cyan for B=0.4 T, and in yellow for B=2.5 T. Although nominally one might expect them to be identical, the 5/6 island chain is about 10 cm further out at high field strength, due to small deformations of the magnet coils under electromagnetic forces.
Evaluation of an important error field component
For the first measurements of the n=1 error field, a special magnetic surface configuration was used31, where ɩ varies slowly and passes through the resonance ɩ=1/2, see Fig. 6.

The ɩ profile is shown for the special configuration developed for field error detection. The ɩ varies only minimally around the resonant value of 1/2. The x axis is a measure of the minor radial size (in meters) of the magnetic flux surface, that is, a pseudo-radial coordinate.
In the complete absence of error fields, a small n=5, m=10 island chain would appear at the ɩ=1/2 location at around 25 cm distance from the innermost magnetic surface, but in the presence of even a small n=1 error field, an n=1, m=2 island chain, visible in a Poincaré plot as two ‘bubbles’, will appear.
The B21 error field is too small to create an island structure large enough to be measured clearly. This is in part due to the good news that it is small, and in part due to ɩ being so close to 1/2, that the electron beam comes very close to its launch position (the electron gun) after two toroidal transits, thus running the risk of hitting the back of the electron gun and disappearing.
It is nevertheless possible to indirectly measure the B21 field error, despite this shadowing problem, by adding an n=1 error field with a well-defined amplitude and phase, using the set of five large external coils32, four of which are shown in yellow in Fig. 1. The primary purpose of these coils is to trim away the unwanted n=1 error field components, but the trim coils are used here to create an extra n=1 error field, and thus generate an n/m=1/2 island chain wide enough to be measurable.
Light fibres installed in the vessel along with detailed measurements of their location allow the pixels of the image plane to be mapped to physical dimensions. In this way, the width of the island in physical units can be inferred from a measurement in pixels. Error bars account for both the physical width of the flux surface traces and the step size going from outside the island chain to inside it. A best attempt is made to report the maximum width of the magnetic islands.
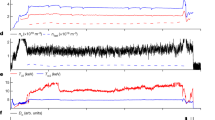
By scanning the phase and amplitude of the imposed, well-defined error field, measuring the island phase and width (Fig. 7), and comparing with equation 1, we find that an n/m=1/2 island with a width of 4 cm must be present, even in the absence of trim-coil induced fields.

For the special ɩ≈1/2 configuration, the n=1, m=2 island size and phase can be measured by the Poincaré section method. Here two conglomerate images a and b with several nested surfaces are shown for two different phases of a purposely added n=1 field structure with the same amplitude. Although the shadowing problem leads to gaps, the trained eye can still detect the changes in size and phase of the m=2 island.
The configuration has dɩ/dr≈0.15 m−1 at the ɩ=1/2 location, so using equation (1) again, we arrive at B21≈5.4 × 10−6. This value is well within the range that can be corrected with the trim coils32. The careful and accurate metrology described earlier in this article is validated by our flux-surface measurements: The as-built coil forms and their as-installed locations have been implemented numerically in our codes, and then used to calculate the size, phase and location of the intrinsic 1/2 island chain resulting from the B21 component. These data agree very well with our fully independent direct measurements of the magnetic topology. The agreement regarding amplitude is shown in Fig. 8. Good agreement is obtained not only for the amplitude of the island chain but also its phase.

The measured island widths are compared directly with those predicted from numerical calculations that take the as-built as-installed geometry of the W7-X coil set into account. Excellent agreement is seen. The offset from zero in the linear fits indicate the intrinsic 4 cm island width. If no intrinsic error field were present, the points would have lined up with the dotted lines. The island widths are determined from the real or synthetic images by use of an image processing software programme developed for these purposes. Since it was not always possible to image the edge of the island chain exactly, and even when so, the electron beam gives a certain width to an island chain or a magnetic surface, the island width has some uncertainty. The error bars indicate the largest and smallest possible island size consistent with the data.
Discussion
The now experimentally validated numerical model of the coil system allows us to identify the primary source of the measured error field. The measured field error is caused primarily by imperfections in the placement and shapes of the planar coils. For the special magnetic configuration chosen here, the planar coils produce a much larger fraction of the magnetic field than they do in configurations used for plasma operation; in fact the one major configuration that has ɩ=1 at the plasma edge has no planar coil current. Therefore, we plan to measure the B11 error field in a configuration whose magnetic field is overwhelmingly dominated by the non-planar coils with ɩ≈1 (ref. 33). Since the B11 and the B21 components should be roughly of the same order of magnitude, and since the B21 error is reproduced by our numerical models, the b11 error is also expected to be small, likely close to or somewhat below the aforementioned estimate of 1.1 × 10−4, thus well within the correction capabilities of the W7-X coil set.
The need for complex 3D shaping and high-accuracy requirements have been viewed as major problems for optimized stellarators. Wendelstein 7-X demonstrates that a large, optimized, superconducting stellarator can be built with an accuracy sufficient to generate good magnetic surfaces with the required topology, and that experimental tools exist to verify the magnetic topology down to and below errors as small as 1:100,000. These results were obtained using magnetic field-line mapping, a sensitive technique to measure the detailed topology of the magnetic surfaces. To reach the other goals of the device, and provide an answer to the question ‘is the stellarator the right concept for fusion energy?’, years of plasma physics research is needed. That task has just started.
Data availability
The data sets generated and/or analysed during the current study are available from the corresponding author on reasonable request.
Additional information
How to cite this article: Pedersen, T. S. et al. Confirmation of the topology of the Wendelstein 7-X magnetic field to better than 1:100,000. Nat. Commun. 7, 13493 doi: 10.1038/ncomms13493 (2016).
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Change history
14 February 2017
A correction has been published and is appended to both the HTML and PDF versions of this paper. The error has been fixed in the paper.
References
Lawson, J. D. Some criteria for a power producing thermonuclear reactor. Proc. Phys. Soc. B 70, 6–10 (1957).
Lorenzini, R. et al. Self-organized helical equilibria as a new paradigm for ohmically heated fusion plasmas. Nat. Phys. 5, 570–574 (2009).
Spitzer, L. The stellarator concept. Phys. Fluids 1, 253–264 (1958).
Nührenberg, J. & Zille, R. Quasi-helically symmetric toroidal stellarators. Phys. Lett. A 129, 113–117 (1988).
Boozer, A. H. Plasma equilibrium with rational magnetic surfaces. Phys. Fluids 24, 1999–2003 (1981).
Canik, F. M. et al. Experimental demonstration of improved neoclassical transport with quasihelical symmetry. Phys. Rev. Lett. 98, 085002 (2007).
Hirsch, M. et al. Major results from the stellarator Wendelstein 7-AS. Plasma Phys. Contr. Fusion 50, 053001 (2008).
Beidler, C. et al. Physics and engineering design for Wendelstein VII-X. Fusion Sci. Technol. 17, 148–168 (1990).
Nührenberg, J. & Zille, R. Stable stellarators with medium β and aspect ratio. Phys. Lett. A 114, 129–132 (1986).
Bosch, H. S. et al. Technical challenges in the construction of the steady-state stellarator Wendelstein 7-X. Nucl. Fusion 53, 126001 (2013).
Kerst, D. W. The influence of errors on the plasma confining magnetic field. J. Nucl. Energy C 4, 253–262 (1962).
Kolmogorov, A. N. On conservation of conditionally periodic motions for a small change in Hamilton’s function. Dokl. Akad. Nauk. SSSR 98, 527–530 (1954).
Arnold, V. I. Small denominators and problems of stability of motion in classical and celestial mechanics. Russ. Math. Surv. 18, 85–191 (1963).
Moser, J. On Invariant Curves of Area-Preserving Mappings of an Annulus. Nachr. Akad. Wiss. Göttingen Math. Phys. Kl. II, 1–20 (1962).
Helander, P. Theory of plasma confinement in non-axisymmetric magnetic fields. Rep. Prog. Phys. 77, 087001 (2014).
Boozer, A. H. Non-axisymmetric magnetic fields and toroidal plasma confinement. Nucl. Fusion 55, 025001 (2015).
Brenner, P. W., Pedersen, T. S., Berkery, J. W., Marksteiner, Q. R. & Hahn, M. S. Magnetic surface visualizations in the Columbia Non-Neutral Torus. IEEE Trans. Plasma Sci. 36, 1108–1109 (2008).
Drewelow, P., Bräuer, T., Otte, M. & Wagner, F. Three-dimensional photogrammetric measurement of magnetic field lines in the WEGA stellarator. Rev. Sci. Instrum. 80, 123501 (2009).
Sinclair, R. M., Hosea, J. C. & Sheffield, G. V. Magnetic surface mappings by storage of phase-stabilized low-energy electron beams. Appl. Phys. Lett. 17, 92–95 (1970).
Dikij, A. G. et al. A new method for studying the vacuum magnetic configuration in stellarators. (Oak Ridge, Tennessee, USA, ORNL Report TR-86/29, (1987).
Hartwell, G. J. et al. Magnetic surface mapping with highly transparent screens on the Auburn torsatron. Rev. Sci. Instrum. 59, 460–466 (1988).
Jaenicke, R. et al. Detailed investigation of the vacuum magnetic surfaces on the W7-AS stellarator. Nucl. Fusion 33, 687–704 (1993).
Renner, H. et al. Physical Aspects and Design of the Wendelstein 7-X Divertor. Fusion Sci. Technol. 46, 318–326 (2004).
Rummel, T. et al. The superconducting magnet system of the stellarator Wendelstein 7-X. IEEE Trans. Plasma Sci. 40, 769–776 (2012).
Andreeva, T., Bräuer, T., Endler, M., Kißlinger, J. V. & Toussaint, U. Influence of construction errors on Wendelstein 7-X magnetic configurations. Fusion Eng. Des. 88, 408–412 (2009).
Andreeva, T. et al. Tracking of the magnet system geometry during Wendelstein 7-X construction to achieve the designed magnetic field. Nucl. Fusion 55, 063025 (2015).
Berezhetskii, M. S., Grebenshchikov, S. E., Popryadukhin, A. P. & Shpigel, I. S. Magnetic surfaces and containment of a plasma by spiral fields in a stellarator with external injection. (in Russian) J. Tech. Phys. 35, 2167 (1965) English translation: Sov. Phys. Tech. Phys. 10, 1662 (1966).
Colchin, R. J. et al. Electron beam and magnetic field mapping techniques used to determine field errors in the ATF torsatron. Rev. Sci. Instrum. 60, 2680–2689 (1989).
Pedersen, T. S. et al. Plans for the first plasma operation of Wendelstein 7-X. Nucl. Fusion 55, 126001 (2015).
Otte, M. et al. Setup and initial results from the magnetic flux surface diagnostics at Wendelstein 7-X. Plasma Phys. Contr. Fusion 58, 064003 (2016).
Lazerson, S. et al. First measurements of error fields on W7-X using flux surface mapping. Nucl. Fusion 56, 106005 (2016).
Rummel, T. et al. The trim coils for the Wendelstein 7-X magnet system. IEEE Trans. Appl. Supercond. 22, 4201704 (2012).
Bozhenkov, S. A. et al. Methods for measuring 1/1 error field in Wendelstein 7-X stellarator. Nucl. Fusion 56, 076002 (2016).
Acknowledgements
This work has been carried out within the framework of the EUROfusion Consortium and has received funding from the Euratom research and training programme 2014–2018 under grant agreement No 633053. The views and opinions expressed herein do not necessarily reflect those of the European Commission. S.L. acknowledges support from US DOE grant DE-AC02-09CH11466. T.S.P. thanks U. Nielsen and K. Søndergaard Larsen for useful suggestions to improve the text.
Author information
Authors and Affiliations
Consortia
Contributions
T.S.P., M.O. and C.B. led the design and construction of the flux surface measurement system, based on a concept developed by M.O. and R.C.W. M.O., S.L., S.B., T.S.P., H.-S.B., R.C.W., T.K. and C.B. conducted the flux surface measurement experiments. M.O., T.S.P., S.B., S.L. and P.H. analysed the data. The article was written primarily by T.S.P., M.O. and P.H., but with input from all the co-authors. The W7-X team contributed the infrastructure, the metrology measurements and proper operation of W7-X, in particular its vacuum systems, the cryostat and the superconducting magnet system.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Pedersen, T., Otte, M., Lazerson, S. et al. Confirmation of the topology of the Wendelstein 7-X magnetic field to better than 1:100,000. Nat Commun 7, 13493 (2016). https://doi.org/10.1038/ncomms13493
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/ncomms13493
This article is cited by
-
Existence of weakly quasisymmetric magnetic fields without rotational transform in asymmetric toroidal domains
Scientific Reports (2022)
-
Initial Exploration of High-Field Pulsed Stellarator Approach to Ignition Experiments
Journal of Fusion Energy (2018)
-
Magnetic confinement fusion: a brief review
Frontiers in Energy (2018)
-
Magnetic configuration effects on the Wendelstein 7-X stellarator
Nature Physics (2018)
-
Capture of heavy hydrogen isotopes in a metal-organic framework with active Cu(I) sites
Nature Communications (2017)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
